1 Hough Transform Algorithm for Biology-image Recognition Using an Artificial Retina Camera Xin Lin and Kazunori Otobe National Agriculture Research Center, Japan Xin Lin National Agriculture Research Center Annual Meeting 2000 Process for Pattern Recognition ● Observation CCD image sensor ● Preprocessing with the help ● Character detection of computer ● Recognition/Deciding algorithm Hough Transform for Object Detection ● Good effect for detecting and finding a noisy image ● For a curved object Hough space will become high dimensionality Hough Transform Algorithm for Biology-image Recognition Using an Artificial Retina Camera
Transcript
1
Hough Transform Algorithm for Biology-image Recognition Using an Artificial Retina Camera
Xin Lin and Kazunori OtobeNational Agriculture Research Center, Japan
Xin Lin National Agriculture Research Center
Annual Meeting 2000
Process for Pattern Recognition
● Observation CCD image sensor
● Preprocessing with the help
● Character detection of computer
● Recognition/Deciding algorithm
Hough Transform for Object Detection
● Good effect for detecting
and finding a noisy image
● For a curved object Hough space
will become high dimensionality
Hough Transform Algorithm for Biology-image Recognition Using an Artificial Retina Camera
2
● AbstractAn artificial retina camera (ARC) is employed for real-time preprocessing of the
input image. And the algorithm of Hough transform is advanced for detecting a
circle-edge object in the two-dimension space. This method also works in parallel
for processing multiple input patterns and partial input images.
● Image processing using an ARC
● Image detecting by the Hough transform
● Experiments of pattern recognition
● Results and discussion
Xin Lin National Agriculture Research Center
Annual Meeting 2000Hough Transform Algorithm for Biology-image Recognition Using an Artificial Retina Camera
3
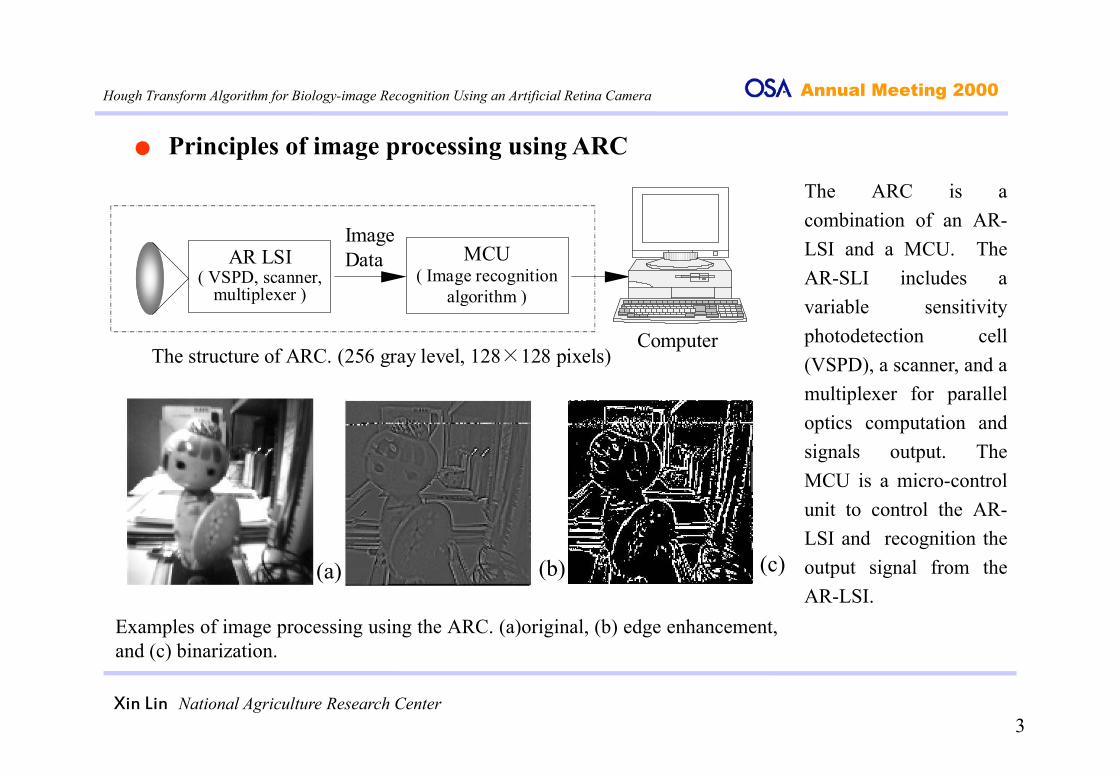
● Principles of image processing using ARC
Xin Lin National Agriculture Research Center
The structure of ARC. (256 gray level, 128×128 pixels) Computer
AR LSI( VSPD, scanner,
multiplexer )
MCU( Image recognition
algorithm )
Image Data
Annual Meeting 2000Hough Transform Algorithm for Biology-image Recognition Using an Artificial Retina Camera
(b)(a) (c)
Examples of image processing using the ARC. (a)original, (b) edge enhancement,and (c) binarization.
The ARC is acombination of an AR-LSI and a MCU. TheAR-SLI includes avariable sensitivityphotodetection cell(VSPD), a scanner, and amultiplexer for paralleloptics computation andsignals output. TheMCU is a micro-controlunit to control the AR-LSI and recognition theoutput signal from theAR-LSI.
4Xin Lin National Agriculture Research Center
0 2 4 6 8 10
0
1
2
3
4
5
6
θ0
ρ0
( xi, yi )
ρ0 = xcosθ0+ysinθ0
y
ximage space (x-y plane)
0.0 0.5 1.0 1.5 2.0 2.5 3.0
-5
0
5( ρ0, θ0 )
loci: ρ = xicosθ+yisinθ
θ
ρ
parameter space (ρ−θ plane)
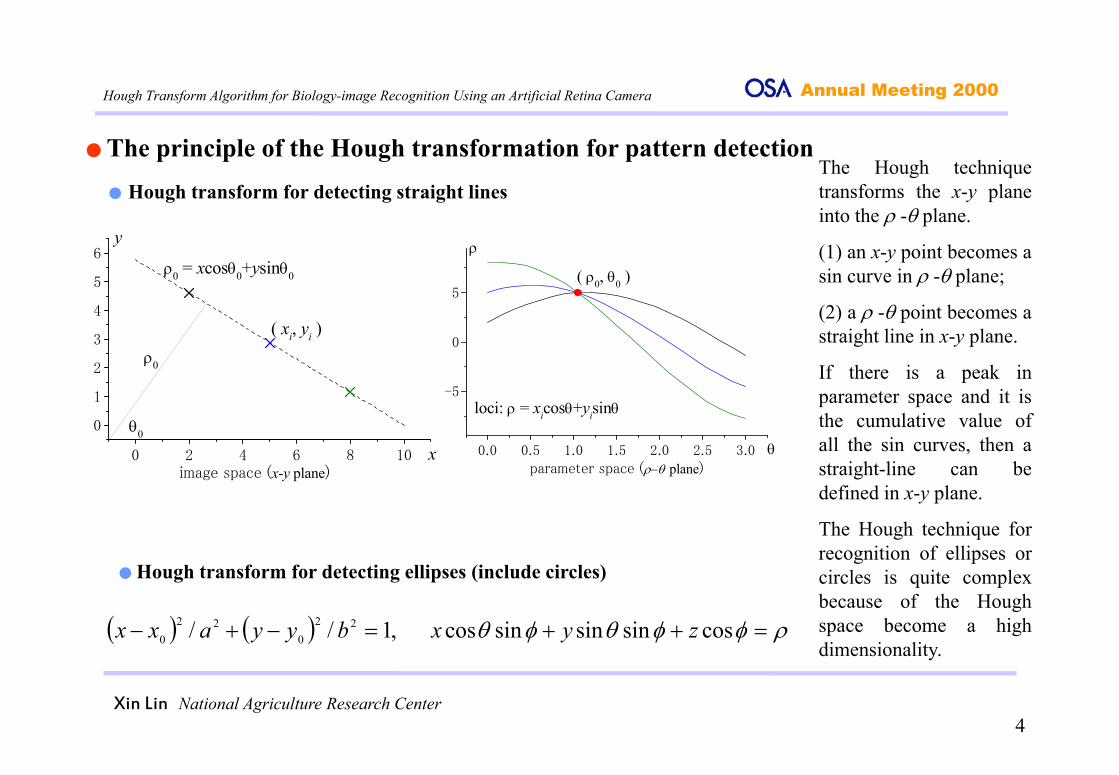
● Hough transform for detecting ellipses (include circles)
( ) ( ) ρφφθφθ =++=−+− cossinsinsincos ,1// 220
220 zyxbyyaxx
Annual Meeting 2000Hough Transform Algorithm for Biology-image Recognition Using an Artificial Retina Camera
● The principle of the Hough transformation for pattern detection● Hough transform for detecting straight lines
The Hough techniquetransforms the x-y planeinto the ρ -θ plane.
(1) an x-y point becomes asin curve in ρ -θ plane;
(2) a ρ -θ point becomes astraight line in x-y plane.
If there is a peak inparameter space and it isthe cumulative value ofall the sin curves, then astraight-line can bedefined in x-y plane.
The Hough technique forrecognition of ellipses orcircles is quite complexbecause of the Houghspace become a highdimensionality.
5Xin Lin National Agriculture Research Center
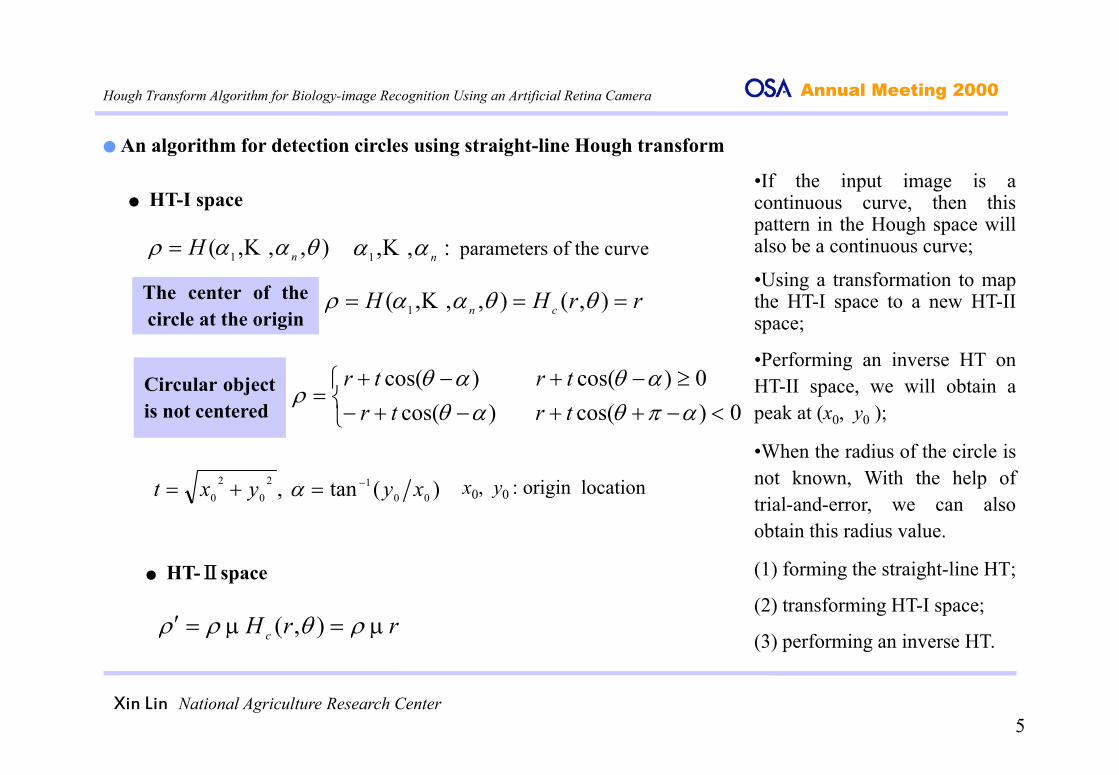
● HT-I space
),,,( 1 θααρ nH Κ= parameters of the curve:,,1 nαα Κ
The center of thecircle at the origin
rrHH cn === ),(),,,( 1 θθααρ Κ
Circular objectis not centered ⎩
⎨⎧
<−++−+−≥−+−+
=0)cos( )cos(
0)cos( )cos(απθαθ
αθαθρ
trtrtrtr
)(tan , 0012
02
0 xyyxt −=+= α
● HT-Ⅱspace
rrH c μμ ρθρρ ==′ ),(
x0, y0 : origin location
Hough Transform Algorithm for Biology-image Recognition Using an Artificial Retina Camera Annual Meeting 2000
● An algorithm for detection circles using straight-line Hough transform
•If the input image is acontinuous curve, then thispattern in the Hough space willalso be a continuous curve;
•Using a transformation to mapthe HT-I space to a new HT-IIspace;
•Performing an inverse HT onHT-II space, we will obtain apeak at (x0, y0 );
•When the radius of the circle isnot known, With the help oftrial-and-error, we can alsoobtain this radius value.
(1) forming the straight-line HT;
(2) transforming HT-I space;
(3) performing an inverse HT.
6Xin Lin National Agriculture Research Center
● Experiment I ―― input images (a cabbage)
(a) original (b) binarization threshold (c) edge extraction
Annual Meeting 2000Hough Transform Algorithm for Biology-image Recognition Using an Artificial Retina Camera
● A cabbage is used for a input image. The size is 128×96 pixels.
●We can see the edge information is parts of two circles (internal circle and external circle).
7Xin Lin National Agriculture Research Center
0.0 1.5 3.0 4.5 6.00
5
10
15
20
25
30
35
external circle
internal circle
HT-I space
ρ
θ
● Experiment I ―― Results of HT-I and HT-II
(a) The patterns which consist of thepeaks in HT-I space after thresholding.They are parts of the cos curves.
(b) The mapping patterns, whichcorresponds to the radius of twocircles in HT-II space
Annual Meeting 2000Hough Transform Algorithm for Biology-image Recognition Using an Artificial Retina Camera
0.0 1.5 3.0 4.5 6.0-2.0
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0
external circle
internal circle
HT-II space
ρ
θ
8Xin Lin National Agriculture Research Center
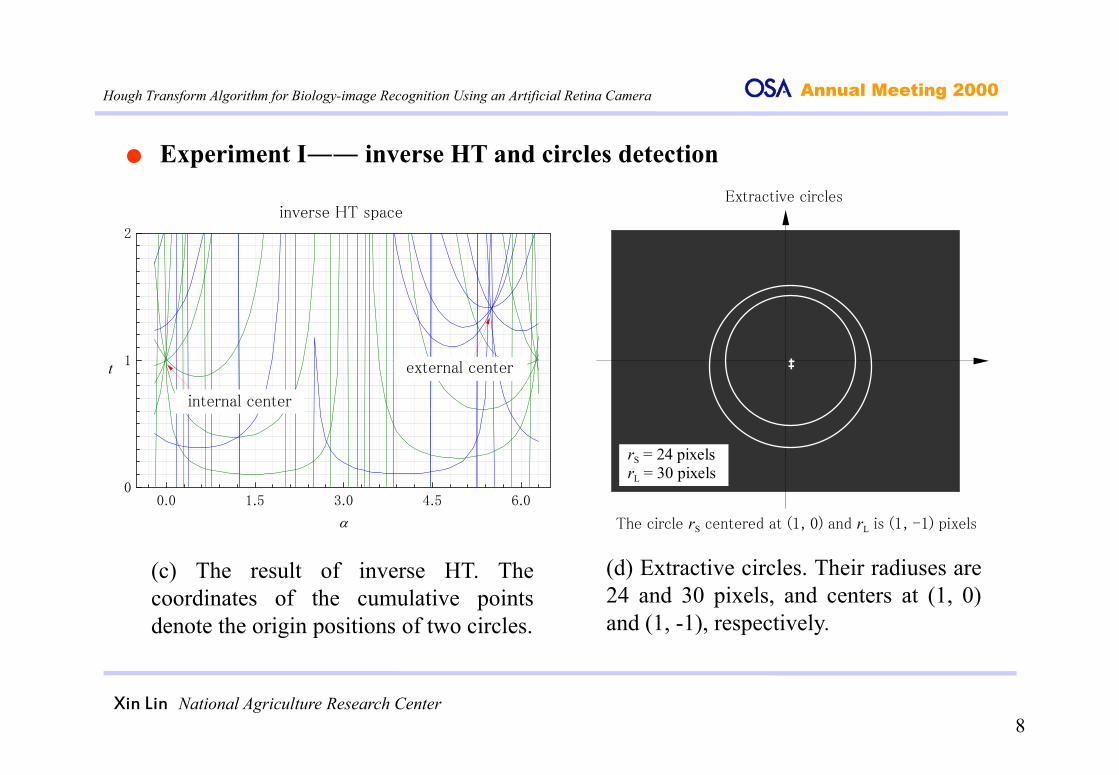
rS = 24 pixels rL = 30 pixels
The circle rS centered at (1, 0) and rL is (1, -1) pixels
Extractive circles
● Experiment I―― inverse HT and circles detection
(c) The result of inverse HT. Thecoordinates of the cumulative pointsdenote the origin positions of two circles.
Hough Transform Algorithm for Biology-image Recognition Using an Artificial Retina Camera Annual Meeting 2000
0.0 1.5 3.0 4.5 6.00
1
2
external center
internal center
inverse HT space
t
α
(d) Extractive circles. Their radiuses are24 and 30 pixels, and centers at (1, 0)and (1, -1), respectively.
9Xin Lin National Agriculture Research Center
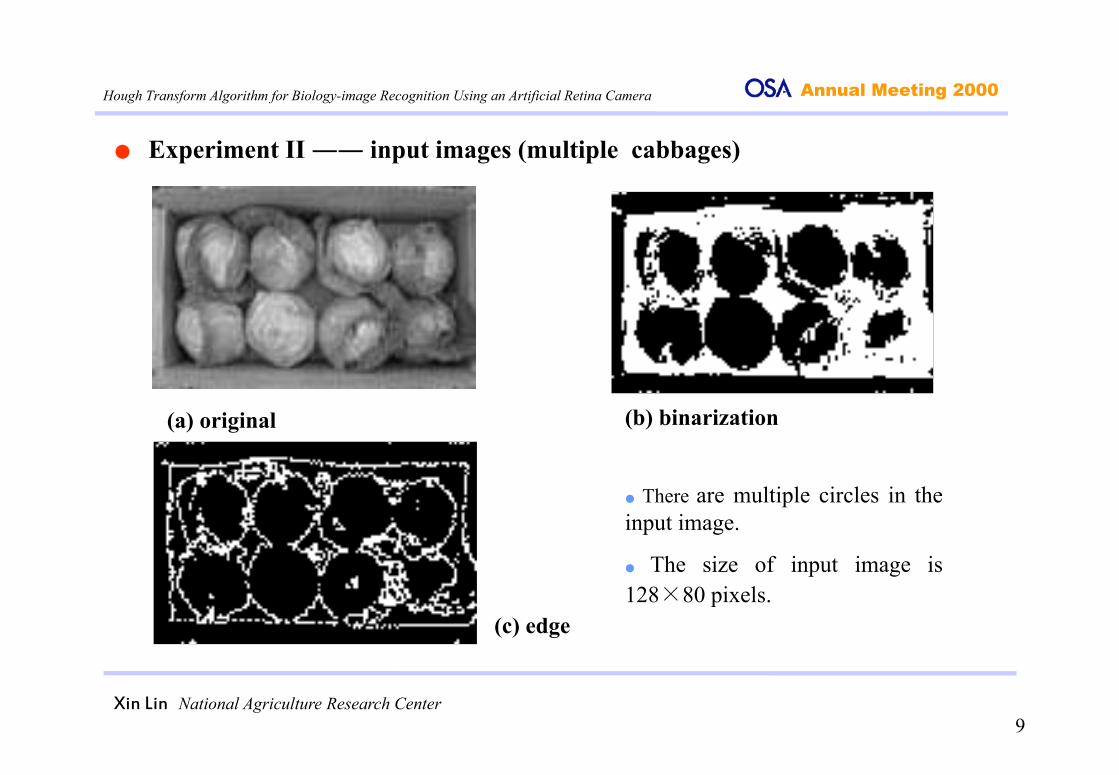
(a) original (b) binarization
(c) edge
Annual Meeting 2000Hough Transform Algorithm for Biology-image Recognition Using an Artificial Retina Camera
● Experiment II ―― input images (multiple cabbages)
● There are multiple circles in theinput image.
● The size of input image is128×80 pixels.
10Xin Lin National Agriculture Research Center
0.0 1.5 3.0 4.5 6.00
10
20
30
40
50
60
HT-I space
circle 4 circle 5
circle 7circle 6circle 3 circle 2
ρ
θ
Annual Meeting 2000Hough Transform Algorithm for Biology-image Recognition Using an Artificial Retina Camera
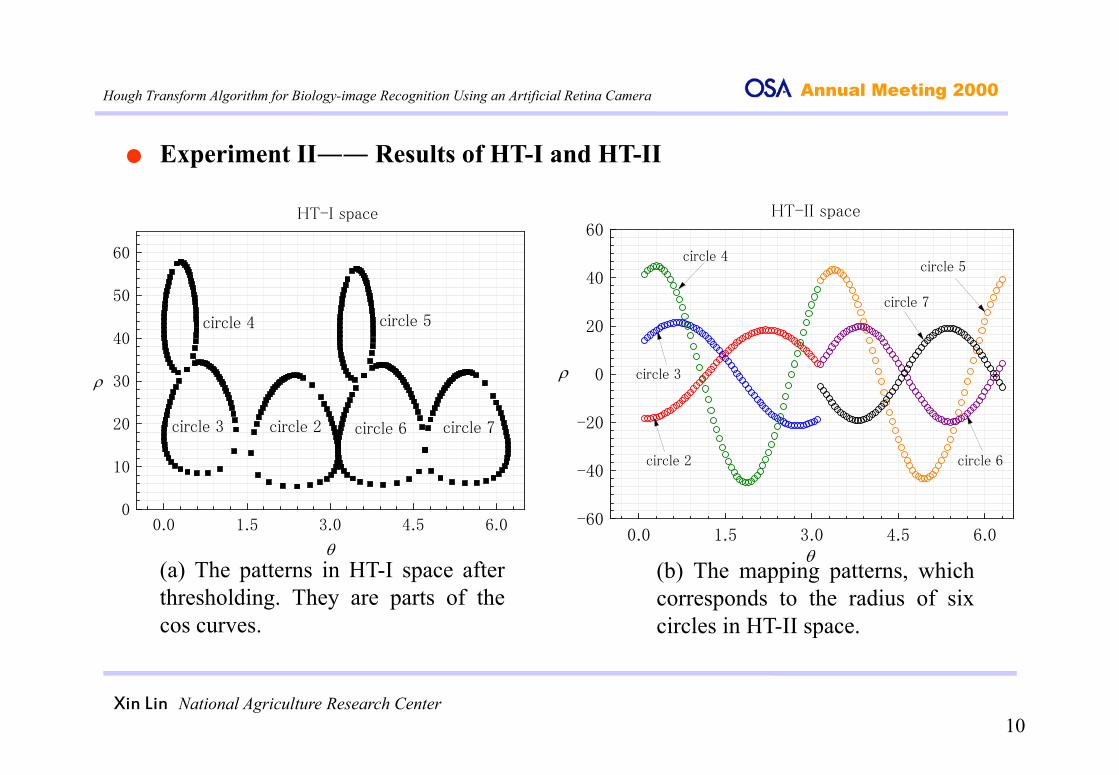
● Experiment II―― Results of HT-I and HT-II
(a) The patterns in HT-I space afterthresholding. They are parts of thecos curves.
(b) The mapping patterns, whichcorresponds to the radius of sixcircles in HT-II space.
Annual Meeting 2000Hough Transform Algorithm for Biology-image Recognition Using an Artificial Retina Camera
0 1 2 3 4 5 60
10
20
30
40
50
60
inverse HT space
circle 7circle 6
circle 5circle 4
circle 3circle 2
t
α
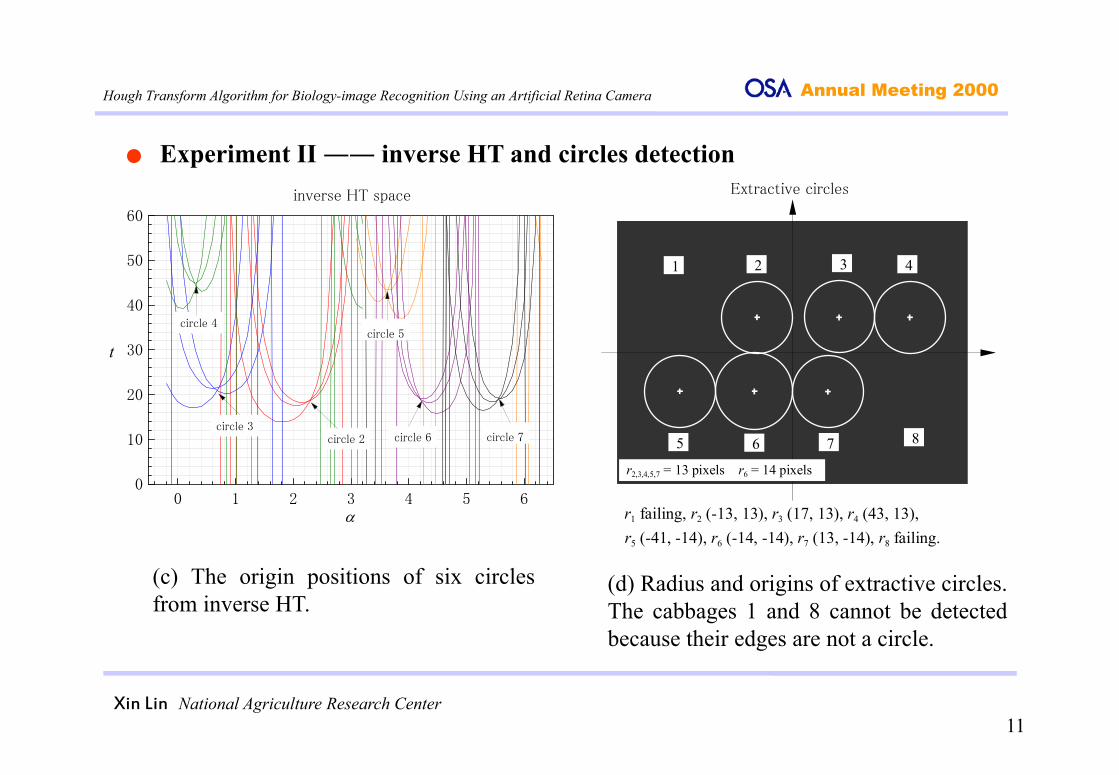
● Experiment II ―― inverse HT and circles detection
(c) The origin positions of six circlesfrom inverse HT.
(d) Radius and origins of extractive circles.The cabbages 1 and 8 cannot be detectedbecause their edges are not a circle.
12Xin Lin National Agriculture Research Center
10 11 12 13 14 1545
50
55
60
65
70
Est
imat
ion
diam
eter
(pi
xel)
Measurement diameter (cm)
● Experimental result
We have also detected four cabbages and their radius is different.This is the result for the relation between the measurement andestimation values by our algorithm. We can see there is a good
linear is showed.
Annual Meeting 2000Hough Transform Algorithm for Biology-image Recognition Using an Artificial Retina Camera
● Conclusion
●We have described a method forpattern recognition.
● An ARC is employed for real-time preprocessing of the inputimage.
● The algorithm of the straight-
line HT is advanced for detectingcircular object in the two-dimension space.
● This method also works inparallel for multiple inputs andfor partial input curves.