IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 54, NO. 3, MARCH 2006 1041
Performance Analysis of Estimation Algorithms ofNonstationary ARMA ProcessesFeng Ding, Yang Shi, Member, IEEE, and Tongwen Chen, Fellow, IEEE
Abstract—The correlation analysis based methods are not suit-able for identifying parameters of nonstationary autoregressive(AR), moving average (MA), and ARMA systems. By using estima-tion residuals in place of unmeasurable noise terms in informationvector or matrix, we develop a least squares based and gradientbased algorithms and establish the consistency of the proposedalgorithms without assuming noise stationarity, ergodicity, orexistence of higher order moments. Furthermore, we derive theconditions for convergence of the parameter estimation. Thesimulation results validate the convergence theorems proposed.
Index Terms—Autoregressive (AR) models, autoregressivemoving average (ARMA) models, convergence properties, gra-dient search, least squares filtering, moving average (MA) models,martingale convergence theorem, parameter estimation, recursiveidentification.
I. INTRODUCTION
AUTOREGRESSIVE (AR), moving average (MA), andARMA models are used often in various applied problems
involving system identification, time-series analysis, spectralanalysis, or deconvolution [1]–[3]; some examples of applica-tion include channel identification in digital communicationsto achieve reduction of intersymbol interference, adaptiveARMA implementation in radar signal processing, and variousbiomedical signal and image processing problems [1].
Recursive least squares (LS) schemes for modeling and fil-tering stochastic AR, MA, and ARMA processes are a class ofimportant adaptive algorithms in signal processing, time-seriesanalysis, and adaptive identification. It is well known that LS fil-tering and modeling of AR processes are a linear problem, whileLS filtering and modeling of MA or ARMA processes, beingintrinsically nonlinear, are more complex in nature [4], [5]. Fordecades, a great deal of work has been published on parameteridentification, adaptive filtering, and prediction of AR, MA, andARMA models. However, many methods, e.g., the correlationanalysis based [6]–[8], have been used to estimate the param-eters of the time-series models by assuming that the observa-tion data are stationary and ergodic, e.g., [4], [9]–[11]. These
Manuscript received October 17, 2004; revised February 17, 2005. This workwas supported by the Natural Sciences and Engineering Research Council ofCanada and the National Natural Science Foundation of China. This paper wasrecommended by Associate Editor G. T. Zhou.
F. Ding is with the Control Science and Engineering Research Center,Southern Yangtze University, Wuxi, Jiangsu 214122, China (e-mail:[email protected]; [email protected]).
Y. Shi is with the Department of Mechanical Engineering, University ofSaskatchewan, Saskatoon, SK S7N 5A9, Canada (e-mail: [email protected]).
T. Chen is with the Department of Electrical and Computer Engineering,University of Alberta, Edmonton, AB T6G 2V4, Canada (e-mail: [email protected]).
Digital Object Identifier 10.1109/TSP.2005.862845
methods are not suitable for identifying the parameters of non-stationary AR, MA, or ARMA systems.
In the LS modeling area, Ljung analyzed consistency of theLS algorithm based on the following assumptions [12]:
C1) the noise is an independent and identically distributedrandom sequence with finite fourth-order moments;
C2) the input and output signals have finite nonzero power.Solo’s convergence analysis was based on conditionC2); and
C3) the process is stationary and ergodic and has a constantvariance [13]; in an important breakthrough, Lai andWei obtained the convergence rate of the LS parameterestimation by assuming that the process noise hasfinite second- and higher order moments [14], i.e.,
C4)for some
where is the algebra generated by the observationsup to and including time . Since then, most conver-gence results of LS (based adaptive control) algorithmshave made such so-called “weak” assumptions as C4).For example, [15]–[17] all assume that the higher ordermoments of the process noise exist, which is usually notthe case in practice, and claim that the existence of thehigher order moment is the weakest condition of theiralgorithm convergence.
The authors think that when studying the 2-norm conver-gence of the parameter estimation, it is neither necessary norreasonable to assume that higher order moments exist [18]–[21].Therefore, exploring the convergence properties of the estima-tion algorithms of the ARMA models under weaker conditionsis still open and also the goal in this paper. Our consistency anal-ysis does not assume that the process noise is stationary and/orergodic, or higher order moments exist, and thus, the process ispossibly nonstationary and nonergodic, in other words, each ofconditions C1)–C4) is not required to hold. Under such weakerassumptions, we explore convergence of the estimation algo-rithms of ARMA processes.
Briefly, this paper is organized as follows. Section II discussesthe identification problem of MA models related to ARMA pro-cesses and points out that the correlation analysis methods arenot suitable for nonstationary and nonergodic cases. Section IIIderives a gradient algorithm and an LS one for ARMA modelsby replacing unmeasurable noise terms in the information vectorwith the estimation residuals. Sections IV and V study the per-formance of the proposed algorithms. Section VI provides sev-eral illustrative examples to show the effectiveness of the al-gorithms proposed. Finally, we offer some concluding remarksin Section VII. (Some proofs of the results in the paper arecollected in the Appendix.)
1042 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 54, NO. 3, MARCH 2006
II. PROBLEM FORMULATION
In order to show that the correlation based identificationmethods are not suitable for nonstationary ARMA systems, letus begin with an MA model
(1)Here, is the system observation data, is the unmeasur-able stochastic noise with zero mean, and s are the parametersto be identified.
In time-series analysis, many methods, e.g., the correlationanalysis based [6]–[8], may be used to estimate the parametersof the MA model in (1) by assuming that is stationary, i.e.,
B1)
constant
From (1), we have
The autocovariance function (or autocorrelation function)of the stationary time series
does not depend on . According to this property, taking theexpectation on both sides of the above equation and using thestationary assumption in B1), when , we obtain
1 equations
Then the 1 unknown parameters can beobtained from these 1 equations as long as we can obtain thecorrelation functions , . In order to computethe correlation functions, one has to assume that (1) is also er-godic. The ergodicity shows that the correlation functionequals the time-averaged value, i.e.,
(2)
This implies that as increases, the termin the last equation converges to a constant for each fixed
and that for large , may be computed approximately by
(3)
However, if is a nonstationary and uncorrelated sto-chastic noise sequence with zero mean and time-varying vari-ance , i.e.,
B2)
then, the correlation functions of also depend on , denotedby . A similar derivation yields
(4)These 1 equations contain 3 2 unknowns: ,
, , and , . The noisevariances are unknown and the correlation functions ofthe nonstationary process cannot be obtained from (2) or (3).Even if are available by using some other way, it isstill impossible to solve the parameter estimates from (4)because it has 2 1 unknowns. Thus, the correlation analysismethods are not suitable for identifying nonstationary AR, MA,and ARMA processes.
This paper focuses on the following ARMA process:
or
(5)
Here, is the system observation data, is an un-measurable noise sequence satisfying assumption B2), and
and are coprime polynomials in the shift operatorwith
The objective of this paper is to present identification algo-rithms to estimate the parameters of the ARMA model in (5)by using the available observation and to study the prop-erties of the parameter estimation by the algorithms involved.Here, we do not assume that (5) is stationary or ergodic; of
DING et al.: ESTIMATION ALGORITHMS OF NONSTATIONARY ARMA PROCESSES 1043
course, our study includes the stationary and ergodic processesas special cases.
If the polynomial is strictly stable, then (5) can be ap-proximated as a high-order AR process. Its parameters can bedetermined using the well-known Yule–Walker equation, if theAR order is known; otherwise, parameters and an appropriateorder can be estimated/determined also by the Levison–Durbinalgorithm, under the assumptions of stationarity and ergodicity.Then, the parameters of the ARMA model can be determinedby using the Pade approximation technique [22]—see Example3. Reference [23] surveyed some methods of determination oforders of AR, MA, and ARMA models.
III. THE ALGORITHM DESCRIPTION
Let us introduce some notation first. The symbol stands foran identity matrix of appropriate sizes; the superscript T denotesthe matrix transpose; represents the determinantof a square matrix ; the norm of a matrix is defined by
; denotes an -dimensional column vectorwhose elements are all 1; and represent themaximum and minimum eigenvalues of , respectively;
represents as ; for , wewrite or if there exists a positiveconstant such that .
Define the parameter vector and information vectoras
and let be the data length and
...
...
(6)
From (5), we easily get
(7)
(8)
where is the parameter vector to be identified. Form aquadratic criterion function [24]
Minimizing gives the least squares estimate
(9)
However, a difficulty arises because in is unavail-able; so it is impossible to compute the estimate by (9). Our
approach is based on the hierarchical identification principle:Let denote the estimate of at time ; then from (8), theunknown variable or can be computed/estimated by
(10)
with
(11)
(12)
Based on (9) and replacing by , the estimate ofmay be also computed by
(13)
Equations (10)–(13) are a finite-data-window least squares iden-tification algorithm for ARMA systems based on the replace-ment of the unmeasurable noise terms with their estimates—wewrite as the ARMA-LS algorithm for short.
To summarize, we list the steps involved in the ARMA-LSalgorithm to compute as increases.
1) Collect the data , select data length .2) To initialize, let and , and form
by (6).3) Compute or by (10), and form by (12) and
(11).4) Compute the estimate by (13).5) Compare with : if they are sufficiently close,
or for some preset small , if
then terminate the procedure and obtain the estimate ;otherwise, increment by one and go to step 3).
The ARMA-LS algorithm in (10)–(13) uses batch data iden-tification, and the major drawback is that it requires computingmatrix inversion at each step. According to the least squaresprinciple [24], the algorithm in (10)–(13) based on the noise es-timation may be implemented by the following recursive form:
(14)
(15)
(16)
(17)
(18)
Here, is generally taken to be a large positive number, e.g.,, . Equations (14)–(18) form the
recursive least squares algorithm for ARMA processes, theARMA-RLS algorithm for short.
This ARMA-RLS algorithm performs a hierarchical compu-tation procedure with increasing because the noise estimates
rely on the parameter estimates [see (18)] and the pa-
1044 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 54, NO. 3, MARCH 2006
rameter estimates also rely on the noise estimates [see(14)–(17)].
An alternative way is based on the negative gradient searchprinciple: replacing the unknown by their estimates ,
by and by , and minimizing givesthe estimate of as follows:
Here, is the step size or convergence factor. The aboveequation can be rewritten as
In order to guarantee the convergence of , all eigenvalues ofhave to be inside the unit circle. One way
is to choose to satisfy
As in [7], if we choose to be
it is easy to get the following recursive stochastic gradient algo-rithm of estimating of the ARMA models, the ARMA-RSGalgorithm for short:
or
The ARMA-RLS and ARMA-RSG algorithms above aresimple and easy to implement on-line. However, a very impor-tant question to ask here is: under what conditions does theparameter estimation vector converge to the true parametervector ? The next sections study the convergence of these twoalgorithms.
IV. THE CONVERGENCE OF THE ARMA-RLS ALGORITHM
In this section, we establish the convergence results of theARMA-RLS algorithm. Some mathematical preliminaries arerequired.
We assume that is a martingale difference se-quence defined on a probability space , where
is the algebra sequence generated by , i.e.,. The noise sequence
satisfies the following assumptions [7].
A1)
A2)
Here, we make no assumptions that is bounded,i.e., the high-order moments of the noise exist. Thus,
may be a nonstationary random noise sequencewith zero mean and time-varying variance.
Define the parameter estimation error vector and a non-negative definite function as
(19)
(20)
and
It follows that
Lemma 1: For the ARMA-RLS algorithm and each, the following inequality holds:
The proofs of lemmas and theorems in this paper are given inthe Appendix.
Lemma 2: For the system in (7) or (8), and the ARMA-RLSalgorithm in (14)–(18), assume that A1) and A2) hold and
A3)is strictly positive real
Then the following inequality holds:
where
(21)
(22)
Here, A3) guarantees that .Theorem 1: For the system in (7) or (8), assume that
A1)–A3) hold, is stable, i.e., all zeros of are insidethe unit circle, and
A4)
DING et al.: ESTIMATION ALGORITHMS OF NONSTATIONARY ARMA PROCESSES 1045
Then the parameter estimation error by the ARMA-RLS algo-rithm in (14)–(18) satisfies
for any
Due to , the noise variance in this theorem may beinfinite. Moreover, we may draw the following corollary fromTheorem 1.
Assume that there exist positive constants , , , andsuch that the following generalized persistent excitation condi-tion (unbounded condition number) holds:
for
Then for any , we have
Since ( : arbitrary small), the estimationerror converges to zero approximately at the rate of1 for nonstationary noise.
When , we get a simple ARMA-LS algorithm
V. THE CONVERGENCE OF THE ARMA-RSG ALGORITHM
In this section, we establish the convergence results of theARMA-RSG algorithm.
As , is calledthe innovation [24], andmay be referred to as the innovation vector. Thus, here maybe also known as the innovation length. When , we obtaina simple ARMA-RSG algorithm based on the noise estimation
(23)
(24)
(25)
(26)
Here, we still take .Theorem 2: For the system in (7) or (8), and the ARMA-RSG
algorithm in (23)–(26), define
and assume that A1) and A2) with hold,is strictly positive real, and
A5)
Then the parameter estimation vector consistently converges tothe true parameter vector .
The ARMA-RSG algorithm has low computational effort,but its convergence is relatively slow. In order to improve thetracking performance of the ARMA-RSG algorithm, we intro-duce a forgetting factor to get the ARMA-RSG algorithmwith a forgetting factor (refer to as the ARMA-FG algorithm)as follows:
(27)
(28)
(29)
(30)
When , the ARMA-FG algorithm reduces to theARMA-RSG algorithm; when , the ARMA-FG algo-rithm is the ARMA projection algorithm.
VI. EXAMPLES
Several examples are given to demonstrate the effectivenessof the proposed algorithm. The first is a delayed MA process;the second is a nonminimum phase MA process to which thePade approximation technique cannot be applied; and the lastis a minimum phase ARMA process, which is used to comparewith the Pade approximation method.
Example 1: Consider a delayed MA model
Here, is taken as an uncorrelated noise sequence withzero mean. Apply the ARMA-LS algorithm with to esti-mate the parameters of this system; the parameter estimates andtheir errors are shown in Table I, and the parameter estimationerror versus is shown in Fig. 1, whereis the relative parameter estimation error.
From Table I and Fig. 1, it is clear that the proposed algorithmestimates the parameters of the MA process effectively.
Example 2: Consider an unstable MA process
Simulation conditions are similar to those of Example 1. Theresults are shown in Table II and Fig. 2.
From Table II and Fig. 2, we see that the proposed algorithmscan be used to estimate the parameters of unstable MA pro-cesses. Since the polynomial in the MA model has two
1046 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 54, NO. 3, MARCH 2006
TABLE IESTIMATES AND ERRORS OF EXAMPLE 1
Fig. 1. The parameter estimation errors � versus t of Example 1.
TABLE IIESTIMATES AND ERRORS OF EXAMPLE 2
roots on the unit circle, this unstable MA process cannot be ap-proximately expressed as a finite-order AR model; thus the Padeapproximation method is invalid.
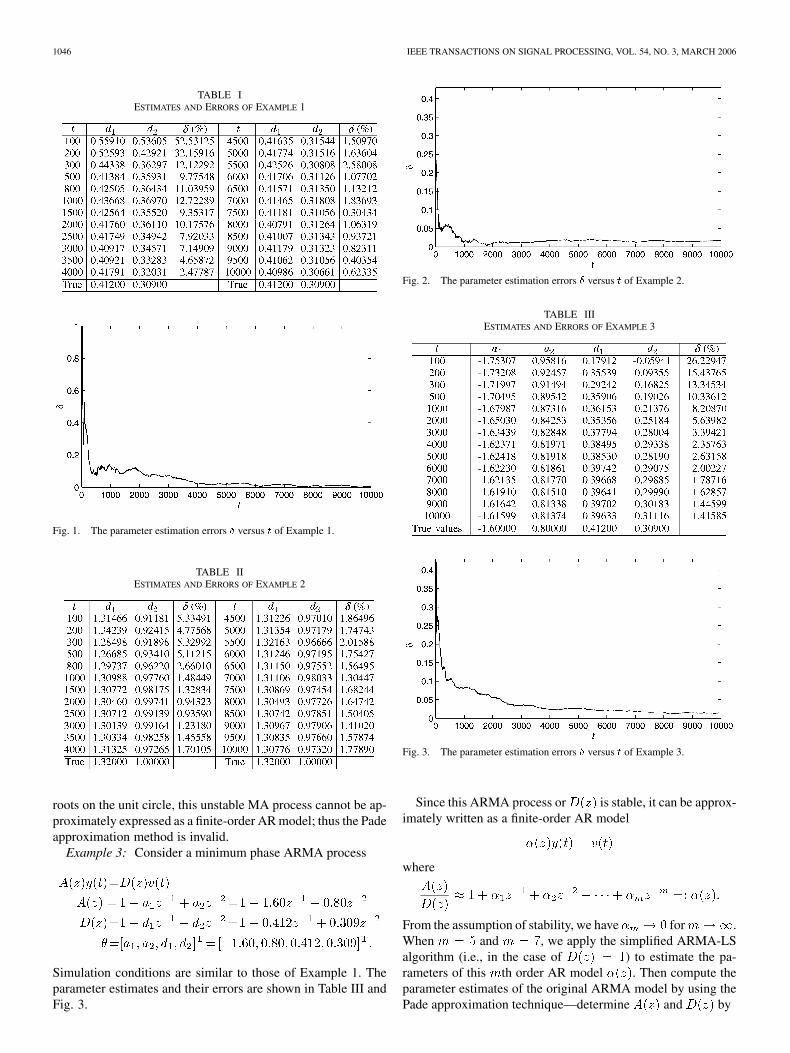
Example 3: Consider a minimum phase ARMA process
Simulation conditions are similar to those of Example 1. Theparameter estimates and their errors are shown in Table III andFig. 3.
Fig. 2. The parameter estimation errors � versus t of Example 2.
TABLE IIIESTIMATES AND ERRORS OF EXAMPLE 3
Fig. 3. The parameter estimation errors � versus t of Example 3.
Since this ARMA process or is stable, it can be approx-imately written as a finite-order AR model
where
From the assumption of stability, we have for .When and , we apply the simplified ARMA-LSalgorithm (i.e., in the case of ) to estimate the pa-rameters of this th order AR model . Then compute theparameter estimates of the original ARMA model by using thePade approximation technique—determine and by
DING et al.: ESTIMATION ALGORITHMS OF NONSTATIONARY ARMA PROCESSES 1047
TABLE IVESTIMATES AND ERRORS OF EXAMPLE 3
Fig. 4. The parameter estimation errors � versus t of Example 3.
comparing the coefficients on both sides of .The results are shown in Table IV and Fig. 4.
From Tables I–IV and Figs. 1–4, we can draw the followingconclusions.
• The parameter estimation errors by the ARMA-LS algo-rithms are becoming smaller (in general) as the data length
increases.• The proposed algorithms are suitable for identifying both
minimum phase and nonminimum phase MA and ARMAprocesses with known orders.
• A minimum phase ARMA process may be approximatelyexpressed by a high-order AR model. Although we canuse the Pade approximation method to determine theparameters of the original ARMA model from the ARmodel, identifying this high-order AR model requiresmore computational efforts.
• The examples validate the proved results in the earliersections.
VII. CONCLUSION
A least squares and gradient algorithms based on replacingunmeasurable noise variables by the estimation residuals are de-rived for ARMA models, and the conditions of convergence ofthe parameter estimates to the true parameters are given. Theanalysis using the martingale convergence theorem indicatesthat the proposed algorithms can give consistent parameter es-timation. The proposed convergence theorems also hold for ARand MA models. Although some nonstationary processes canpossibly be converted into stationary ones, the algorithms in thispaper are, in general, better methods in directly identifying non-stationary models. The properties of the ARMA-RSG algorithmwith a forgetting factor require further research.
APPENDIX
PROOFS
Proof of Lemma 1
From the definition of in (15), we have
Taking determinants on both sides and using the formulayields
Hence
Dividing and summing for gives (noting thatis a nondecreasing function of )
1048 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 54, NO. 3, MARCH 2006
Proof of Lemma 2
Define the innovation vector
(31)
From (18), we have
(32)
Substituting (14) into (19) and using (31) and (32), it is not dif-ficult to get
(33)
or
(34)
Premultiplying (34) by and using (33) yields
Using (15), we have
Using (15) and (31)–(33), from (20), we obtain
Using (21), (22), (32), and (33), we have
(35)
Since , , are uncorre-lated with and are -measurable, taking the conditionalexpectation of both sides of (35) with respect to and usingA1)–A2) give
(36)
Since
(37)
using (18), (22), and (37), from (21), we get
where
Since is a strictly positive real function, there exists a con-stant such that is also strictly positive real. Refer-ring to [7, Appendix C], we can draw that the following inequal-ities hold
(38)
Adding both sides of (36) by gives the conclusion ofLemma 2.
Proof of Theorem 1
Let
Since is nondecreasing, using Lemma 2 and A5) yields
(39)
DING et al.: ESTIMATION ALGORITHMS OF NONSTATIONARY ARMA PROCESSES 1049
Using Lemma 1, it is clear that for , the sum for from1 to of the last term on the right-hand side of (39) is finite.Now applying the martingale convergence theorem [7, LemmaD.5.3] to (39), we conclude that converges almost surelyto a finite random variable, say, ; i.e.,
or
(40)Since is a strictly positive real function, from (38), it followsthat
From the definition of , we have
Using (40), we have
for any
(41)Since is stable, according to [7, Lemma B.3.3] and (37),there exist positive constants and such that the followinginequality holds:
(42)Now we prove ,
. Define the vector error as follows[refer to the definitions of and ]:
Hence, for any , we have
(43)
For any vector with , we have
Thus
(44)
Combining (41) with (43) and (44) gives
for any
This proves Theorem 1.
Proof of Theorem 2
Define the parameter estimation error vector and the in-novation as
(45)
(46)
It follows that
(47)
Substituting (23) and (43) into (45) gives
(48)
Let
(49)
Taking the norm on both sides of (48) and using (49) gives
(50)
1050 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 54, NO. 3, MARCH 2006
From the definitions of , we have
(51)
Hence
where
Since is strictly positive real, there exists a small constantsuch that is (also strictly) positive real. Referring
to [7, Appendix C], the following inequality holds:
Thus
Adding both sides of (50) by gives
Since , , , , , andare uncorrelated with and are measurable, taking
the conditional expectation on both sides of the above equationwith respect to and using A1)–A2) gives
(52)
Noticing that the sum of the right-hand second last term of (52)for from 1 to is finite
Applying the martingale convergence theorem [7, LemmaD.5.3] to (52), we conclude that convergesalmost surely to a finite random variable, say, ; i.e.,
(53)
and also
(54)
It follows that
and
(55)Using the Kronecker lemma [7, Lemma D.5.5] gives
DING et al.: ESTIMATION ALGORITHMS OF NONSTATIONARY ARMA PROCESSES 1051
Or
Equation (53) implies that the parameter estimation error is con-sistently bounded without the assumption of persistent excita-tion. Next, we show that converges almost surely tozero. From (48), it is easy to get
for any
(56)
Hence, we have
Here, we have used the relation .Using the Kronecker lemma [7, Lemma D.5.5] gives
From (56), we have
(57)
Replacing in (49) with gives
Using (57), it follows that
or
Squaring and using the relation gives
Since is uncorrelated with and ismeasurable, taking the conditional expectation with respect to
and using A1)–A2) yields
Summing for from to and dividing gives
1052 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 54, NO. 3, MARCH 2006
where
From the definition of in (24), we have
It is easy to get
Thus
(58)
Now we prove ,. Define [see the definitions of
and in (25)]
Hence
Thus, according to the definitions of and in (25), wehave
(59)
For any vector with , we have
It follows that
(60)
Combining (58) with (59) and (60) gives the conclusion ofTheorem 2.
REFERENCES
[1] J. L. Rojo-Álvarez, M. Martinez-Ramón, M. de Prado-Cumplido, A.Artés-Rodriguez, and A. R. Figueiras-Vidal, “Support vector method forrobust ARMA system identification,” IEEE Trans. Signal Process., vol.52, no. 1, pp. 155–164, 2004.
[2] X. D. Zhang and Y. Zhou, “A novel approach to estimating MA pa-rameters of causal ARMA models from cumulants,” IEEE Trans. SignalProcess., vol. 40, no. 11, pp. 2870–2873, 1992.
[3] X. D. Zhang, Y. Song, and Y. D. Li, “Adaptive identification of nonmin-imum phase ARMA models using higher cumulants alone,” IEEE Trans.Signal Process., vol. 44, no. 11, pp. 1285–1288, 1996.
[4] S. Li, Y. Zhu, and B. W. Dickinson, “A comparison of two linear methodsof estimating the parameters of ARMA models,” IEEE Trans. Autom.Control, vol. 34, no. 8, pp. 915–917, 1989.
[5] S. Prasad and S. D. Joshi, “A new recursive pseudo least squares algo-rithm for ARMA filtering and modeling I,” IEEE Trans. Signal Process.,vol. 40, no. 11, pp. 2766–2774, 1992.
[6] J. Franke, “A Levinson-Durbin recursion for autoregressive-moving av-erage processes,” Biometrika, vol. 72, no. 3, pp. 573–581, 1985.
[7] G. C. Goodwin and K. S. Sin, Adaptive Filtering, Prediction and Con-trol. Englewood Cliffs, NJ: Prentice-Hall, 1984.
[8] D. Graupe, Time Series Analysis, Identification and Adaptive Fil-tering. Melbourne, Florida: Krieger, 1984.
DING et al.: ESTIMATION ALGORITHMS OF NONSTATIONARY ARMA PROCESSES 1053
[9] F. Desbouvries, I. Fijalkow, and P. Loubaton, “On the identification ofnoisy MA models,” IEEE Trans. Autom. Control, vol. 41, no. 12, pp.1810–1814, 1996.
[10] D. Graupe, D. J. Krause, and J. B. Moore, “Identification of autoregres-sive moving-average parameters of time series,” IEEE Trans. Autom.Control, vol. AC-20, no. 1, pp. 104–107, 1975.
[11] W. Wu and P. Chen, “Adaptive AR modeling in white Gaussian noise,”IEEE Trans. Signal Process., vol. 45, no. 5, pp. 1184–1192, 1997.
[12] L. Ljung, “Consistency of the least-squares identification method,” IEEETrans. Autom. Control, vol. 21, no. 5, pp. 779–781, 1976.
[13] V. Solo, “The convergence of AML,” IEEE Trans. Autom. Control, vol.24, no. 6, pp. 958–962,, 1979.
[14] T. L. Lai and C. Z. Wei, “Least squares estimates in stochastic regres-sion models with applications to identification and control of dynamicsystems,” Ann. Statist., vol. 10, no. 1, pp. 154–166, 1982.
[15] , “Extended least squares and their applications to adaptive controland prediction in linear systems,” IEEE Trans. Autom. Control, vol. 31,no. 10, pp. 898–906, 1986.
[16] C. Z. Wei, “Adaptive prediction by least squares prediction in stochasticregression models,” Ann. Statist., vol. 15, no. 4, pp. 1667–1682, 1987.
[17] L. Guo, “Convergence and logarithm laws of self-tuning regulators,” Au-tomatica, vol. 31, no. 3, pp. 435–450, 1995.
[18] F. Ding and T. Chen, “Combined parameter and output estimation ofdual-rate systems using an auxiliary model,” Automatica, vol. 40, no.10, pp. 1739–1748, 2004.
[19] , “Hierarchical gradient-based identification of multivariable dis-crete-time systems,” Automatica, vol. 41, no. 2, pp. 315–325, 2005.
[20] , “Hierarchical least squares identification methods for multivari-able systems,” IEEE Trans. Autom. Control, vol. 50, no. 3, pp. 397–402,2005.
[21] , “Performance bounds of forgetting factor least squares algorithmfor time-varying systems with finite measurement data,” IEEE Trans.Circuit Syst. I, vol. 52, no. 3, pp. 555–566, 2005.
[22] K. Kumar, “On the identification of autoregressive moving averagemodels,” Contr. Intell. Syst., vol. 28, no. 2, pp. 41–46, 2000.
[23] J. G. de Gooijer and A. G. Robinson, “Methods for determining the orderof ARMA process,” Int. Statist. Rev., vol. 53, no. 3, pp. 301–329, 1985.
[24] L. Ljung, System Identification: Theory for the User, 2nd ed. Engle-wood Cliffs, NJ: Prentice-Hall, 1999.
Feng Ding was born in Guangshui, Hubei Province,China. He received the B.Sc. degree from the HubeiUniversity of Technology, Wuhan, China, in 1984and the M.Sc. and Ph.D. degrees in automatic controlboth from the Department of Automation, TsinghuaUniversity, China, in 1991 and 1994, respectively.
From 1984 to 1988, he was an Electrical Engineerwith the Hubei Pharmaceutical Factory, Xiangfan,China. Since 1994 he was with the Department ofAutomation at the Tsinghua University, Beijing,China. He is now a Professor at the Control Science
and Engineering Research Center, Southern Yangtze University, Wuxi, China,and has been a Research Associate at the University of Alberta, Edmonton, AB,Canada, since 2002. His current research interests include model identificationand adaptive control. He is coauthor of Adaptive Control Systems (Beijing:Tsinghua University Press 2002) and published over 100 papers on modelingand identification as the first author.
Yang Shi (S’02–M’05) was born in Guangshui,Hubei Province, China. He received the B.Sc. andM.Sc. degrees from Northwestern PolytechnicalUniversity, Xi’an, China, in 1994 and 1998, re-spectively, and the Ph.D. degree in electrical andcomputer engineering from the University of Al-berta, Edmonton, AB, Canada, in 2005.
From 1998 to 2000, he was with Department ofAutomation, Tsinghua University, Beijing, China.Since 2005, he has been an Assistant Professorin the Department of Mechanical Engineering,
University of Saskatchewan, SK, Canada. His research interests include digitalsignal processing, multirate systems, communications systems, network-basedcontrol, and underwater robotics. He has published more than 20 journal andconference proceeding papers in these research areas.
Tongwen Chen (S’86–M’91–SM’97–F’06) )re-ceived the B.Sc. degree from Tsinghua University,Beijing, China, in 1984 and the M.A.Sc. and Ph.D.degrees from the University of Toronto, Toronto,ON, Canada, in 1988 and 1991, respectively, all inelectrical engineering.
From 1991 to 1997, he was an Assistant/AssociateProfessor in the Department of Electrical and Com-puter Engineering, University of Calgary, Canada.Since 1997, he has been with the Department ofElectrical and Computer Engineering, University
of Alberta, Edmonton, AB, Canada, and is presently a Professor of electricalengineering. He held visiting positions at the Hong Kong University of Scienceand Technology and Kumamoto University. His current research interestsinclude process control, multirate systems, robust control, network-basedcontrol, digital signal processing, and their applications to industrial problems.He is coauthor (with B.A. Francis) of Optimal Sampled-Data Control Systems(Berlin, Germany: Springer, 1995). He is an Associate Editor for Automatica,Systems and Control Letters, and DCDIS Series B.
Dr. Chen received a University of Alberta McCalla Professorship for2000/2001 and a Fellowship from the Japan Society for the Promotion ofScience for 2004. He was an Associate Editor for IEEE TRANSACTIONS ON
AUTOMATIC CONTROL during 1998–2000. He is a registered ProfessionalEngineer in Alberta, Canada.