IEEE/ACM TRANSACTIONSON NETWORKING, VOL. 10,NO. 1, FEBRUARY 2002 67�
ScalableFlow Control for MulticastABR Servicesin ATM Networks
Xi Zhang,� Senior Member, IEEE, KangG. Shin,� Fellow, IEEE, DebanjanSaha,andDilip D. Kandlur,� Member, IEEE
Abstract—Weproposea flow-control schemefor multicast ABRser� vicesin ATM networks. At the heart of the proposedschemeisan� optimal second-orderrate control algorithm, called the -con-�trol�
, designedto dealwith the variation in RM-cell round-trip time(R�
TT) resultingfr om dynamicdrift of the bottleneckin a multicasttr�
ee.Applying two-dimensionalrate control, the proposedschememak� esthe rate processconverge to the available bandwidth of theconnection’s most congestedlink sensedby the traff ic source. Italso� confinesthe buffer occupancyto a targetregimeboundedby afinite buffer capacity as the systementers the equilibrium state.
It works well irr espective of the topology of the multicast tr ee.Using�
the fluid analysis,we model the proposedschemeand an-alyze� the systemdynamicsfor multicast ABR traff ic. Westudy thecon vergencepropertiesand derive the optimal-control conditionsfor the -control. The analytical resultsshow that the schemeis
stable� andefficient in thesensethat both thesourcerate andbottle-neck� queuelength rapidly convergeto a small neighborhoodof thedesignated
operating point. We presentsimulation resultswhichv� erify theanalytical observations.Thesimulation experimentsalsodemonstrate
the superiority of the proposedschemeto the otherschemes� in dealing with RM-cell RTT and link-bandwidth varia-tions,�
achieving fair nessin both buffer andbandwidth occupancies,and� enhancingaveragethr oughput.
Index Terms— -control, ABR, ATM, buffer control, feed-back-soft�
Manuscript received March 5, 1999; revised August 2, 1999, April 18,2000, and October 29, 2000; approved by IEEE/ACM TRANSACTIONS ON
N�
ETW�
ORKING Editor�
R. Rom. This work was supportedin part by the U.S.Office of Naval ResearchunderGrantN00014-99-1-0465.An earlierversionof thispaperwaspresentedin partat theIEEE INFOCOM’99,New York, NY.
X.�
Zhangwas with the Real-Time ComputingLaboratory, DepartmentofElectrical Engineeringand ComputerScience,University of Michigan, AnnArbor, MI 48109-2122USA(e-mail:[email protected]).Heisnow withthe�
Sahais with Tellium, Inc., Oceanport,NJ 07757-0901USA (e-mail:[email protected]).
D. D. Kandlur is with the Networking SoftwareandServicesDepartment,IBM�
T.J. Watson ResearchCenter, Hawthorne, NY 10532 USA (e-mail:kandlur@w�
atson.ibm.com).PublisherItem Identifier S 1063-6692(02)01081-6.
tipoint,�
multipoint-to-point,andmultipoint-to-multipointtrans-missions.� However, for theconvenienceof presentation,in thispaper we usethe narrow-sensedefinition for multicastwhichstands! for thepoint-to-multipointtransmission.)The first gen-eration" of multicastABR algorithms[1]–[3] employ a simplehop-by-hopfeedbackmechanismfor thispurpose.In thesealgo-rithms,feedbackResourceManagement(RM) cellsfromdown-stream! nodesareconsolidatedat branchpoints.On receiptofa# forward RM cell, the consolidatedfeedbackis propagatedupw$ ardsby a singlehop. While hop-by-hopfeedbackis verysimple,! it doesnot scalewell becausetheRM-cell RTT is pro-portional to theheightof themulticasttree.Moreover, unlessthefeedbackRM cellsfromthedownstreamnodesaresync% hronizedat# eachbranchpoint, the sourcemay be misledby the incom-plete feedbackinformation,which cancausetheconsolidation&noise' problem [4], [5].
T(o reducethe RM-cell RTT and eliminate consolidation
noise, the authors of [5] and [6] proposedfeedbacksyn-chronization) at eachbranchpoint by accumulatingfeedbackfrom all* do
�wnstreambranches.The main problem with this
scheme! is its slow transientresponsesincethe feedbackfromthe�
congestedbranch may have to needlesslywait for thefeedback+
from “longer” paths,which maynot becongestedatall.# Delayedcongestionfeedbackcan causeexcessive queueb�uild-up and cell loss at the bottlenecklink. The authorsof
without waiting for all branches’feedbackduringthetransient�
phase.One,
of the critical deficienciesof the schemesdescribedabo# ve is that they do not detectand remove nonresponsivebranches�
from the feedback synchronizationprocess.Oneor- more nonresponsive branchesmay detrimentally impactend-to-end" performanceby providing either stale congestioninformation,.
or by stalling the entire multicast connection.W/
e propose a Soft-Sync0
hronization Protocol (SSP)�
whichderi�
ves a consolidatedRM cell at each branch point fromfeedback+
RM cellsof differentdownstreamnodesthat arenotnecessarilyresponsesto the sameforward RM cell in eachsynchronization! cycle. TheproposedSSPnot only scaleswellwith1 multicast-tree’sheight and path lengths[8] while pro-viding2 efficient feedbacksynchronization,but also simplifiesthe�
implementationof detectionandremoval of nonresponsivebranches.�
A schemesimilar in spirit but different in termsofimplementationwas proposedindependentlyin [5], [6].
As clear from the above discussion,the problemof deter-mining� thebottlenecklink bandwidthin a multicastABR con-nectionhasbeenaddressedbymany researchers.Unfortunately,
IEEE/ACM TRANSACTIONSON NETWORKING, VOL. 10,NO. 1, FEBRUARY 2002
little attentionhasbeenpaidto theproblemonhow to adjustthetransmission�
rateto matchthebottleneckbandwidthandbuffercapacity) in themulticastcontext. All of theschemesproposedinthe�
literatureretrofit the transmissioncontrolmechanismusedfor+
unicastABR connectionsto multicastconnections.Conse-quently3 , they have overlookedanimportantbut subtleproblemthat�
is uniqueto multicastABR connections.Unlike in unicast,in amulticastconnectionthebottleneckmayshift fromonepathto�
anotherwithin the multicasttree.As a result, the RM-cellR4
TT in the bottleneckpath may vary significantly. SincetheRTT playsacritical role in determiningtheeffectivenessof anyfeedback+
flow-control scheme,it is importantto identify andhandlesuchdynamicdrifts of the bottleneck.Failure to adaptwith1 RM-cell RTT variationsmay either lead to large queueb�uild-upsat thebottleneckor slow transientresponse.A5
key componentof the schemeproposedin this paperis.
an optimal second-orderrate control algorithm, called the-contr& ol,6 designedto cope with RM-cell RTT variations.
Specif7
ically, the proposedratecontrol schemenot only regu-latesthe traffic sourceratebasedon the congestionfeedback,b�ut alsoadjuststhe rate-gain parameter ,6 which is the speed
of- rate increase.As will be discussedlater, the maximumqueue-size3 is an increasingfunction of both the RM-cell RTTand# therate-gain parameter ,6 andthe -controlcanmake theflow-control performancedynamically adaptive to RM-cellRTT variations.Using thefluid analysis,we modelthe -con-trol�
with thebinary-congestionfeedback,andstudythesystemdynamics�
in the scenariosof both persistentandon-off ABRtraf�
fic sources.Wedevelopanoptimalcontrolcondition,underwhich1 the -control guaranteesthe monotonic convergenceof- systemstateto the optimal regime from an arbitrary initialv2 alue.Theanalyticalresultsshow that theproposedschemeisef" ficient andstablein that both the sourcerateandbottleneckqueue3 length rapidly converge to a small neighborhoodofthe�
designatedoperatingpoint. The -control is also shownto�
adaptwell to RM-cell RTT variations in terms of bufferrequirements8 and fairness.1 The
(simulation experimentsalso
v2 erify theanalyticalresultsandthesuperiorityof theproposedscheme! to the other schemesin RTT and link-bandwidthadapti# veness,fairnessin bothbuffer andbandwidthusage,anda# veragethroughput.
The(
paper is organized as follows. Section II describesthe�
proposedscheme.SectionIII establishesthe flow-controlsystem! model. Section IV justifies the necessityand fea-sibility! of the -control, presentsthe -control algorithm,and# investigates its properties.Section V derives analyticale" xpressionsfor bothtransientandequilibriumstates,evaluatesthe�
scheme’sperformancefor the single-connectioncase,and# comparethe analysisand simulation results.SectionVIanalyzes# the flow-control performanceof concurrentmultiplemulticast-connections,� and comparesthe proposedschemewith1 the other existing schemes.The paperconcludeswithSection7
VII.
1The definition of fairnessusedthroughoutthis paperis adoptedfrom [9]wherethe fairnessis achieved whenall connectionsreceive anequalshare/al-locationof thenetwork resources(bandwidthor buffer capacities).Thisdiffersfrom the max-minfairness,which dealswith moregeneralcaseswheresomeconnections’demandis smallerthanan equalshare/allocationof the networkresources.
II. THE PROPOSEDS7
CHEME
Based9
on the ABR flow-control framework in [10], weuse$ RM cells to convey network-congestioninformation. AforwardRM cell is sentby theroot (source)nodeperiodicallyor- onceevery data-cells,
�and eachreceiver nodereplies
by�
returningto the sourcea feedbackRM cell with Conges-tion�
Indication (CI) and Explicit Rate (ER) information. Weredefine the RM-cell format by adding information on therate-g8 ain parameter(second-order)control in the standardRM cell to deal with RM-cell RTT variations.In particular,tw�
o new one-bit fields, Buffer CongestionIndication (BCI)and# New Maximum Queue(NMQ), aredefined. Our schemedistinguishes�
thefollowing two typesof congestion.
Bandwidth Congestion: If queuelength at# a switchbecomes�
larger thana predeterminedthreshold ,6 thenthe�
switchsetsthelocal CI bit to 1.Buf:
fer Congestion: If themaximumqueuelength at#a# switchexceedsthetargetbuffer occupancy ,6 where
[11] and is the buffer ca-pacity , thentheswitchsetsthelocal BCI to 1.
A.;
The Source Algorithm
Fig.<
8 in AppendixA shows the pseudocodefor the sourcealgorithm.# Uponreceiving a feedbackRM cell, thesourcefirstchecks) if it is time to exercisethe buffer-congestioncontrol(the�
sourcedetectsa transition from a rate-decreasephasetoa# rate-increasephase,that is, whenlocal congestionindicator(LCI)�
equals1 while theCI bit in thereceived RM cell is 0.Therate-g8 ain parameteris adjustedaccordingto the currentvalueof- the local BCI (LBCI) and the BCI bit in the just receivedRM cell. This leadsto threecases:1) if BCI is 1 in theRM cellreceived,therate-gain parameterAdditive IncreaseRate(AIR)is.
decreasedmultiplicatively by a factor of ;2) if bothLBCI andBCI are0, AIR is increasedadditively bya# stepof size ; 3) if and# ,6 AIRis.
increasedmultiplicatively by thesamefactorof . In all thethree�
cases,therate-decreaseparameterMultiplicativeDecreaseFactor (MDF) is adjustedbasedon the estimatedbottleneckbandwidth�
BW EST. Then,the local NMQ bit is marked andthe�
BCI-bit in the RM cell received is saved in LBCI for thenext -controlcycle.Thesourcealwaysexercisesthecell-rate(f�
irst-order)control whenever an RM cell is received. Usingthe�
same,or updated,rate-parameters,thesourceadditively in-creases,) or multiplicatively decreases,its Allowed Cell Rate(A�
CR) basedon thereceived CI-bit. Fig. 3 in SectionV showsthe�
III). Driven by feedbackCI-bit, fluctuatesaroundthe�
bottleneckbandwidth,but alternatesbetweentwo differentramp-upspeedsdeterminedby the feedbackBCI-bit. Conse-quently3 , the maximumqueuelength at# the bottleneckisconf) inedto thedesignatedoperatingregimearound .
B. The Switch Algorithm
At thecenterof switchcontrolalgorithmis apairof connec-tion-update�
vectors:1) =?>A@B@ CBDFEGE HFI?= ,6 the connectionpattern
ZHANG etJ al.: SCALABLE FLOW CONTROL FORMULTICAST ABR SERVICES IN ATM NETWORKS 69
outputport of the switch is (not) a downstreambranchof the multi-cast) connection.Thus, V?WAXBX Y[ZF\]\ ^A_?V impliesthatadata�
copy should(not)besentto the th�
downstreambranchanda# feedbackRM cell is (not) expectedfrom the th
�downstream
branch;�
2 2) `badcGe f?`bgFhjilk mAa?i ,6 the responsive branchvector isinitialized to and# resetto whene1 ver a consolidatedRM cellis sentupward from the switch. nboqpGr s?n?tFujvqw xAoMv is set to1 if a feedbackRM cell is received from the th
�downstream
branch.�
Theconnectionpatternof y?zF{B{ |[}�~G~ �A�My is updatedby�?�q�G� �?�b�F�j�q� �A�?� each" time whenthe nonresponsive branchisdetected�
or a new connectionrequestis received from a down-stream! branch.
Fig. 9 of AppendixA givesthe pseudocodeof switch algo-rithm.8 Uponreceiving a datacell, theswitchmulticastsit to itsoutput- portsspecified by �?�F�B� �R���G� �A�?� ,6 if the correspondingoutput- links areavailable,elseenqueuesit in its branch’squeue.Mark�
thebranch’sCI (EFCI) if . Update for+
-control (seeSectionIV.A) if thebranch’snew e" xceedsthe�
old . if its updated . Re-cei) ving a feedbackRM cell from eitheroneof receiversor aconnected) downstreambranch,theswitchfirst marksits corre-sponding! bit in �?�q�G� �?�?�F�j�q� �A�?� and# thenperformstheRM-cellconsolidation.) If the modulo-2addition(the soft-sychcroniza-tion�
afully-consolidatedfeedbackRM cell isgeneratedandsentupw$ ard. But, if the modulo-2addition ,6 the switch awaitsother- feedbackRM-cellsfor synchronization.Sincetheconsol-idatedRM-cell is not requiredto be derived only from thosefeedback+
a consolidatedRM-cell is sentupward. The predeter-minedtimeoutvalue for nonresponsivenessis determinedby�
thedifferencebetweenthemaximumandminimumRM-cellRTTs. We usethe forward RM-cell arrival time as a naturalclock) for detecting/removingnonresponsivebranches(so,it stillw1 orks even if thereare faults in downstreambranches).If aswitch! receives a forward RM-cell, the multicastconnection’sÀjÁ Â?ÃqÄGÅ ÆGÇÉÈ¿Ãq reduces8 by one.If ÊjË Ì?ÍqÎGÏ Ð¼ÑÉÒ¿ÍqÌ (timeout)
a flow-control theory viewpoint, even though they areblended�
togetherin theproposedalgorithms.Theflow-controlsignaling! relies on RM cells, which deliver rate-controlandcongestion) informationbetweenthe soruce-ratecontrollerandthe�
network/receivers.For multicastABR, scalabilityis crucialsince! the flow-control traffic due to RM cells and feedbackdelay�
may increasewith the numberof receivers.We proposeSSP7
[8] for flow-control signaling,which scaleswell with themulticastsessionsize,thanksto the following two properties:1) the feedbackdelayis virtually independentof themulticastsession! size,and2) the ratio of feedbackRM cells to forwardRM cellsat eachlink of themulticastsessionis no larger than1[4], [8].
with abinarycongestionfeedback(CI-bit), and2)ER-basedrate-control8 with an explicit-rate feedback(ER-value). TheCI-basedó
schemeis more suitable for LANs becauseof itsminimal multicast signaling cost and lowest implementationcomple) xity. Ascomparedto theCI-basedscheme,theER-basedscheme! is more responsive to network congestionand canbetter�
serve WAN environmentswhere the bandwidth-delayproduct is large.However, theER-basedschemeis muchmoree" xpensive to implement than the CI-basedscheme.In thispaper , we will focus only on the CI-basedscheme,and therate8 control andthe -control to bediscussedwill be only forthe�
CI-based(not ER-based)3ô
scheme.! We modeltheCI-basedflow-controlsystemby the first-orderfluid analysis[12]–[17],which1 usesthecontinuous-timefunctions and# as# thefluid+
approximationof the sourcerate and bottleneckqueuelength,õ
respectively. We also assumethe existenceof only asingle! bottleneck4 on- eachpath at a time with queuelengthequal" to and# a “persistent”sourcewith for
+each" multicastconnection.
A.;
System Description
As shown in Fig. 1, amulticast-connectionmodelconsistsofpaths with RM-cell RTT’s and# bottleneckbandwidths
for . Thereis only onebottleneckoneachpathwhereis the “forward” delayfrom the sourceto the bottleneck,
the�
“backward” delayfrom the bottleneckto�
the sourcevia the receiver, and the�
bottleneckqueuelength. We usethe synchronousmodel by assumingthat thesource! sendsRM cellsperiodicallywith aninterval equal" toa# frö
4This is not a restriction,becausethebottleneckis definedasthemostcon-gestedlink or switch.
70÷
IEEE/ACM TRANSACTIONSON NETWORKING, VOL. 10,NO. 1, FEBRUARY 2002
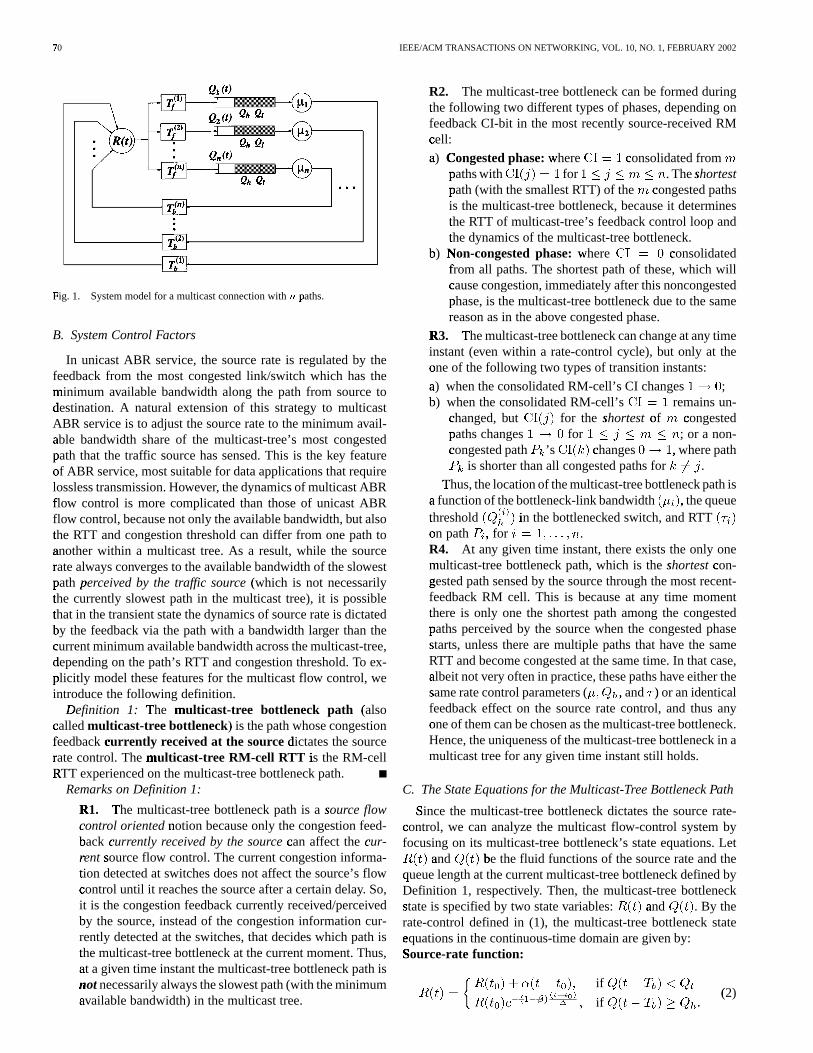
Fig.ø
1. Systemmodelfor a multicastconnectionwith ù paths.ú
B. System Control Factors
In unicastABR service,the sourcerate is regulatedby thefeedbackfrom the most congestedlink/switch which hastheminimum� available bandwidthalong the path from sourcetodestination.�
A natural extensionof this strategy to multicastABR serviceis to adjustthesourcerateto theminimumavail-able# bandwidthshareof the multicast-tree’smost congestedpath that the traffic sourcehassensed.This is the key featureof- ABR service,mostsuitablefor dataapplicationsthatrequirelosslessõ
w control is more complicatedthan thoseof unicastABRflow control,becausenotonly theavailablebandwidth,but alsothe�
RTT andcongestionthresholdcandiffer from onepathtoanother# within a multicasttree.As a result,while the sourcerate8 alwaysconvergesto theavailablebandwidthof theslowestpath perû ceived by the traffic source (which
�is not necessarily
the�
currentlyslowestpath in the multicasttree), it is possiblethat�
in thetransientstatethedynamicsof sourcerateis dictatedby�
the feedbackvia the pathwith a bandwidthlarger thanthecurrent) minimumavailablebandwidthacrossthemulticast-tree,depending�
on thepath’sRTT andcongestionthreshold.To ex-plicitly modelthesefeaturesfor themulticastflow control,weintroducethefollowing definition.
Defü
inition 1: The(
multicast-trý ee bottleneck path (also�
called) multicast-tr eebottleneck)þ
is thepathwhosecongestionfeedback+
currÿ ently received at the sourcedictates�
thesourcerate8 control.Themulticast-trý eeRM-cell RTT is
.the RM-cell
R4
TT experiencedon themulticast-treebottleneckpath.Remarks on Definition 1:
R1.�
The(
multicast-treebottleneckpath is a sour% ce flowcontr& ol oriented notion� becauseonly thecongestionfeed-back�
curr& ently received by the source can) affect the cur-&r� ent source! flow control.Thecurrentcongestioninforma-tion�
detectedat switchesdoesnot affect thesource’sflowcontrol) until it reachesthesourceafteracertaindelay. So,it is thecongestionfeedbackcurrentlyreceived/perceivedby�
the source,insteadof the congestioninformationcur-rently detectedat theswitches,thatdecideswhich pathisthe�
following two differenttypesof phases,dependingonfeedbackCI-bit in the mostrecentlysource-received RMcell:)a)# Congested�
phase:where1 consolidated) frompaths with for . Theshortest%path (with thesmallestRTT) of the congested) pathsis themulticast-treebottleneck,becauseit determinesthe�
RTT of multicast-tree’sfeedbackcontrol loop andthe�
dynamicsof themulticast-treebottleneck.b)�
Non-congested�
phase: where1 consolidated)from+
all paths.The shortestpathof these,which willcause) congestion,immediatelyafterthisnoncongestedphase, is themulticast-treebottleneckdueto thesamereason8 asin theabove congestedphase.
R3.�
The(
multicast-treebottleneckcanchangeatany timeinstant(even within a rate-controlcycle), but only at theone- of thefollowing two typesof transitioninstants:
a)# whentheconsolidatedRM-cell’s CI changes ;b)�
whentheconsolidatedRM-cell’s remainsun-changed,) but for the shortest% of- congested)paths changes for ; or a non-congested) path ’s changes) ,6 wherepath
thebottleneckedswitch,andRTTon- path ,6 for .R4. At any given time instant,thereexists theonly onemulticast-tree� bottleneckpath,which is the shortest% con-)gested� pathsensedby thesourcethroughthemostrecent-feedbackRM cell. This is becauseat any time momentthere�
is only one the shortestpath amongthe congestedpaths perceived by the sourcewhenthe congestedphasestarts,! unlesstherearemultiple pathsthat have the sameRTT andbecomecongestedat thesametime. In thatcase,albeit# notveryoftenin practice,thesepathshaveeitherthesame! ratecontrolparameters( ,6 and )
þor an identical
feedbackeffect on the sourcerate control, and thus anyone- of themcanbechosenasthemulticast-treebottleneck.Hence,theuniquenessof themulticast-treebottleneckin amulticasttreefor any giventime instantstill holds.
C. The State Equations for the Multicast-Tree Bottleneck Path
Since7
the multicast-treebottleneckdictatesthe sourcerate-control,) we cananalyzethe multicastflow-control systembyfocusingon its multicast-treebottleneck’sstateequations.Let
and# be�
thefluid functionsof thesourcerateandthequeue3 lengthat thecurrentmulticast-treebottleneckdefinedbyDefinition 1, respectively. Then, the multicast-treebottleneckstate! is specified by two statevariables: and# . By therate-controldefined in (1), the multicast-treebottleneckstateequations" in thecontinuous-timedomainaregiven by:Sour�
ce-rate function:
if
if(2)�
ZHANG etJ al.: SCALABLE FLOW CONTROL FORMULTICAST ABR SERVICES IN ATM NETWORKS 71
Multicast-tr eebottleneck queuefunction:
(3)�
where1 and# (�
and# are# definedin (1)and# is thesourcerateupdateinterval); and# are# thecurrentand# lastobservationtimes,respectively, of thesystemstatesforthe�
currentmulticast-treebottleneckpath,and is chosensuchthat,�
duringtheperiodof ,6 themulticast-treebottleneckpath is f
öixed and# unique� ,6 andalso,during is only
in eitheranincreasingor adecreasingphase; is thecurrent) multicast-treeRM-cell RTT; is
.thehigh (low)
queue-threshold3 for the currentmulticast-treebottleneck; isthe�
availablebandwidthof thecurrentmulticast-treebottleneck.Remarks on the System State Equations (2) and (3): Fluid
analysis# is a time-periodpiece-wisemodelingprocedure[16].So,7
wecanuseasetof systemstateequations(2) and(3) of thesame! formtomodelthedynamicsof differentmulticast-treebot-tleneck�
pathsduringthedifferenttimeperiods,by replacingthesystem! statevariables,suchas ,6 and fordif�
thetraffic source,canbealwaysachieved eitherby letting ������� ����� , orotherwise(if ����� � !�"$# ) by letting %'&)( * + be
�smallenoughsuchthatmul-
ticast�
treebottleneckpaththat the traffic sourcecanperceive is uniqueduring,�-/.10 2.
IV. ADAPTATION TO V3
ARIATIONS OF MUL4
TICAST-TREE
RM-C4
ELL� RT
4T
The cross-traffic at eachlink may causethe multicast-treebottleneck�
pathto shift from onepathto another. So,themulti-cast-tree) RM-cell RTT fluctuatesdynamicallybetween
and# . Themainanddi-rectimpactof RM-cellRTT variationsisonthemaximumbufferrequirement8 for thebottleneckpath.
A. Maximum Buffer Requirement and Cell-Loss Control
Although5
SSPmakes the RM-cell RTT for+
the proposedscheme! muchsmallerthanthat for thehop-by-hopscheme,assho! wn in [8], ’s swing between and# is still largeenough" to make a significant impact on . As discussedin.
[15], increasingor decreasing is.
not effective enoughto�
have the maximumqueuelength upper-bounded$ bythe�
maximum buffer capacity when1 the multicast-treeRM-cell4
RTT v2 ariesdueto drift of themulticast-treebottle-neck.This is becauserate-increase/decreasecontrol can onlymake fluctuate around the designatedbandwidth, butcannot) adjust the rate-fluctuationamplitude that determines
. So, also# dependson the sourcerate-gain pa-rameter (to
�be detailedin SectionV). is analytically
sho! wn in [15] to increasewith both and# rate-gain parameterand# canbewrittenasa function, , o6 r
for agiven . In reality, thebuffer capacity, , o6 nthe�
e" xpressionthat reveals an analytical relationshipamongthemaximumqueuesizeandrate-controlparameters.As suggestedby�
Theorem1 andalsoanalyzedin [11], [12], [15], [16], [18],is a monotonicincreasingfunction of both and#
,6 andthuscanbe controlledby adjusting for given . Thetheorem�
given below derives an explicit relationshipamong,6 and subject! to the losslesstransmissionand
constraints.)
72÷
IEEE/ACM TRANSACTIONSON NETWORKING, VOL. 10,NO. 1, FEBRUARY 2002
Theorem 2: Consideró
amulticastconnectionflow-controlledby�
the proposedschemewith and# at# themulticast-treebottleneck.If ,6 thenthe followingclaims) hold.
Claimó
1. and# such! that.
Claimó
2. is lower-boundedby the functionwhere1 and# .
Pr;
oof: The(
proof is providedin AppendixC.Remarks on Theorem 2: (1)
<Claimó
1showsthat iscon-trollable,�
andidentifies a sufficient conditionfor+
the feasibility of losslesstransmission.Moreover, Claim 1describes�
the configurationof the lossless-transmissionregiondef�
ined in . (2)<
Claimó
2 gives a lower boundof the lossytransmission�
region for+
given and# ,6 which is ex-pressed by a continuousfunction defined over . Since is
.partitioned into and# ,6 the lower boundof can) beusedasan# approximateupperboundfor when1 the lower boundfor
is tight. Thus,for any given and# ,6 the lower-boundfunction pro vides the network de-signer! with a simpleformula to estimate without1 seekingitsclose-form) expressionasafunctionof and# ,6 whichis im-possible toobtain[dueto thenonlinearityof (16)].Furthermore,since! the lower-boundfunction ,6 di-viding2 and# ,6 is obtainedby theconstraint: ,6setting! in the lower boundyields a formula:
,6 whichcanbeusedto estimatewhen1 thelower-boundof is tight. (3)
losslesstransmissioncondition/region nor the lower boundof- contains) . This is not surprisingsinceit is the ratemis-matchbetween and# ,6 insteadof theabsolutevalueof ,6that�
determines .T(o illustratethetightnessof thederived lowerboundof ,6 the
e" xactborderwhichpartitions ,6 thelower-boundfunctionofgi� ven by ,6 andtheconfigurationsof- thelosslesstransmissionregion (the
�shadedareaseparated
by�
)þ
andlossytransmissionregionare# plottedin Fig. 2,with cells) and cells,)which1 gives ,6 and cell/ms) (about155Mb/s).The(
exactborderbetween and# is.
obtainednumerically[bysolving! (16) which needs ].
=The lower-boundfunction of
(gi�
ven by )þ
plotted in Fig. 2is.
found to be very closeto the exact borderbetween and#. In addition,thesmaller ,6 thetightertheboundis, which is
consistent) with theapproximation when1 is closeto�
1 [see(44)].
B. The Second-Order Rate Control
As suggestedby Theorem2, can) becontrolledto confineto�
,6 andas long as ,6 losslesstrans-mission� can be guaranteedby adjusting in
.responseto the
v2 ariationof . Thecontrolover —whichwecall-contr& ol— is the second-ordercontrol processwhich will be
elaborated" on below from a control-theoreticviewpoint. Theoriginal- ATM recommendationfor unicast (CI-based)ABR
flow control is basedon theAdditive IncreaseandMultiplica-ti�ve Decrease(AIMD) ratecontrol [8]. TheAIMD adapts
to�
based�
on the feedbackCI-bit. Since the AIMD appliesdirect�
controlover the rate to�
matchthe target ,6 we cancall) AIMD thespeed% feedback control (from
�acontrol-theoretic
vie2 wpoint). Thespeedfeedbackcontrolsystemis traditionallycalled) the first-order feedbackcontrol system (having onepole, or being representedin a one-dimensionalstate-space).The -control is an accelerationfeedback-controlsystem(ha�
ving two poles,or beingrepresentedin a two-dimensionalstate-space),! which is one-orderhigher thanthe AIMD, sinceit exertsdirect control over . Thus,we call the
-control the second-or% der rate control,6 which provides onemoredimensionin state-spacecontrolover thedynamicsof theproposed flow-controlsystem.
C. The -Control
The -control is a discrete-timecontrol sinceit is only ex-ercised" when the sourcerate control is in a “decrease-to-in-crease”) transitionbasedonthebuffer congestionfeedbackBCI.
(or�
1) if (or�
),þ
whereis the targetbuffer occupancy
(i.e.,�
setpoint% )þ
in theequilibriumstate.If themulticast-treebot-tleneck�
shifts from a shorterpathto a longerone,then will1increase,making larger. When e" ventuallygrowsbe�
yond ,6 the buffer tendsto overflow, implying that thecurrent) is
.too large for the increased . Thesourcemustre-
duce�
to�
preventcell losses.On theotherhand,if decreases�
from+
its currentvaluedueto theshift of themulticast-treebot-tleneck�
,6 only asmallportionof buffer isused,im-plying that thecurrent is too small for thedecreased . Thesource! shouldincrease to
�avoid buffer under-utilizationand
impro.
ve responsivenessin grabbingavailable bandwidth.So,feedbackBCI containsthe informationon RM-cell RTT vari-ations.# Keeping has
>two benefits: (1)
the�
sourcecanquickly grabavailablebandwidth,and(2) it canachie# ve high throughputandnetwork resourceutilization.
ZHANG etJ al.: SCALABLE FLOW CONTROL FORMULTICAST ABR SERVICES IN ATM NETWORKS 73
The main purposeof -control is to handlethe buffer con-gestion� resultingfrom thevariationof . Wesetthreegoalsfor
-control:(1) ensurethat quickly3 convergesto, andstayswithin,1 theneighborhoodof ,6 which is upper-boundedby
,6 from an arbitrary initial value by driving their corre-sponding! rate-gainparameters to
�theneighborhoodof
for given ; (2) maintainstatisticalfairnesson the buffer oc-cupanc) y amongmultiple multicastconnectionswhich shareacommon) multicast-treebottleneck;and(3) minimize the extracost) incurredby the -controlalgorithm.Toachievethesegoals,we1 proposea “converge-and-lock” -control law in which thene� w value is
To characterizethe -control’s convergenceproperties,wefirst introducethefollowing two definitions.
Def?
inition 3: The(
neighborhood@ of- targetbuffer occupancyis specified by with1
(6)�
(7)�
where1 is governedby theproposed -controllaw.
Definition 4: is said tomonotonically con) verge to ’s neighborhoodat time
from its initial value , i6 f
; and
.The(
-control is applied either in trA ansient state,! duringwhich1 has
>not yet reached ’s neighborhood,or in
equilibriumB state,! in which fluctuateswithin ’sneighborhood� periodically. The -controlaimsatmakingcon) verge rapidly in transientstateandstayingsteadilywithinits neighborhoodin equilibrium state.The following theoremsummarizes! the -control’s convergenceproperties,optimalcontrol) conditions,andthemethodof computingthe -controlparameters in both the transientand equilibrium states.Notethat�
and# are# the closestattainablepoints around, b6 ut may� not necessarilybe themidpointbetweenand# . The actuallocationof between
�
and# depends�
onall rate-controlparametersandtheinitialv2 alue .
TheorC
em 3: Consideró
theproposed -control law (5) whichis appliedto a multicastconnectionwith its multicast-treebot-tleneck�
characterizedby ,6 and . If (1) , a6 n
arbitrary# initial valueat time ,6 (2) ,6 and(3),6 thenthe following
claims) hold:Claimó
1. During the transientD
state,6 the -control lawguarantees� to
� monotonically con) verge to ’sneighborhood� ,6which1 aredeterminedby
ifif
(8)�
if.if
(9)�
where1 is.
definedin Definition 4.Claimó
2. DuringtheequilibriumE state,6 thefluctuationam-plitudes of around# are# upper-boundedby
(10)�
(11)�
and# the diameterof neighborhoodfor the target buffer occu-panc y is upper-boundedasfollows:
(12)�
where1 is.
the rate-gain parametercorrespondingtofor given .
Pr;
oof: The(
proof is detailedin AppendixD.Remarks:
on Theorem 3: The(
-controllaw issimilar to, butdif�
fersfrom, theAIMD algorithm[9] in thefollowingsenses.Inthe�
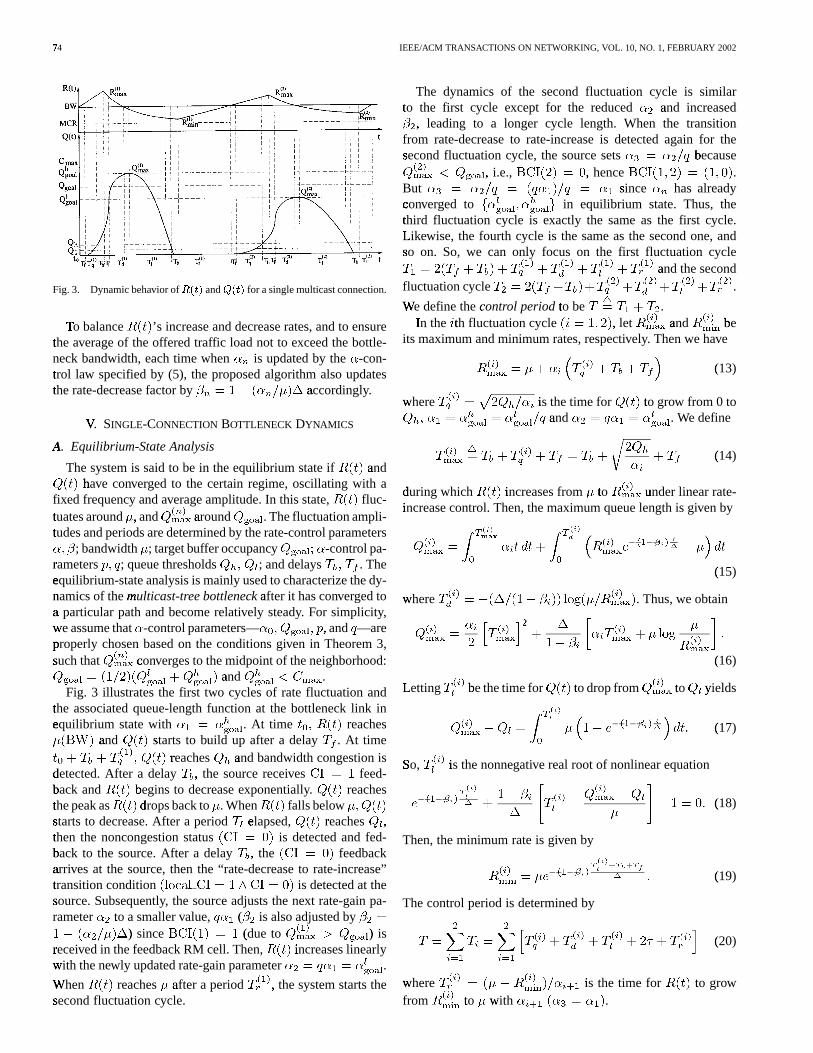
rameters8 ; queuethresholds ; anddelays . Theequilibrium-state" analysisis mainlyusedto characterizethedy-namics� of themulticast-trQ ee bottleneck after# it hasconvergedtoa# particularpathandbecomerelatively steady. For simplicity,we1 assumethat -controlparameters— ,6 and —areproperly chosenbasedon the conditionsgiven in Theorem3,such! that con) vergesto themidpointof theneighborhood:
and# .Fig. 3 illustratesthe first two cyclesof ratefluctuationand
the�
associatedqueue-lengthfunction at the bottlenecklink inequilibrium" statewith . At time reaches8
and# starts! to build up after a delay . At timereaches8 and# bandwidthcongestionis
detected.�
After a delay ,6 the sourcereceives feed-back�
and be�
gins to decreaseexponentially. reachesthe�
peakas drops�
backto . When fallsbelowstarts! to decrease.After a period elapsed," reaches8 ,6then�
the noncongestionstatus is detectedand fed-back�
to the source.After a delay ,6 the feedbackarri# ves at the source,thenthe “rate-decreaseto rate-increase”transition�
condition is detectedat thesource.! Subsequently, thesourceadjuststhenext rate-gain pa-rameter to
�asmallervalue, (
�is alsoadjustedby
)þ
since (due�
to ) iþ
srecei8 ved in thefeedbackRM cell. Then, increases
.linearly
with1 thenewly updatedrate-gainparameter .
When/
reaches after# a period ,6 thesystemstartsthesecond! fluctuationcycle.
The dynamicsof the secondfluctuation cycle is similarto�
the first cycle except for the reduced and# increased,6 leading to a longer cycle length. When the transition
from rate-decreaseto rate-increaseis detectedagain for thesecond! fluctuationcycle, the sourcesets because
�
,6 i.e., ,6 hence .But since! has alreadycon) verged to in equilibrium state. Thus, thethird�
fluctuation cycle is exactly the sameas the first cycle.LikR
ewise, the fourth cycle is the sameasthe secondone,andso! on. So, we can only focus on the first fluctuation cycle
and# thesecondfluctuationcycle .
W/
e define thecontr& ol period to�
be .In6
the th�
fluctuationcycle ,6 let and# be�
its maximumandminimumrates,respectively. Thenwehave
(13)�
where1 is.
thetime for to�
grow from 0 toand# . Wedefine
(14)�
during�
which increases.
from to�
under$ linearrate-increase.
control.Then,themaximumqueuelengthis given by
(15)�
where1 . Thus,weobtain
(16)�
LettingR
be�
thetimefor to�
dropfrom to�
yieldsS
(17)�
So,7
is.
thenonnegative realroot of nonlinearequation
(18)�
Then,theminimumrateis given by
(19)�
Thecontrolperiodis determinedby
(20)�
where1 is.
the time for to�
growfrom to
�with1 .
ZHANG etJ al.: SCALABLE FLOW CONTROL FORMULTICAST ABR SERVICES IN ATM NETWORKS 75
(a) (b)
(c) (d)
Fig.4. Equilibriumandtransientstateperformanceevaluation.(a) T versusU . (b) V versusW . (c) X versusY[Z \^] ). (d) _ versus̀ba c^d ).
ms.Also, set ms,cells,) and the initial sourcerate for
+the
equilibrium" state.Fig. 4(a) plots v2 ersus for different ’s obtained
from the analysis and the simulations7e
for the ideal casewhere1 . Fig. 4(a) shows that
7eWf
eusedtheNetSimpackage[19] for thesimulations,andsetthesimulationparametersú exactlythesameasthoseusedtheanalysisfor comparisonpurposes.
monotonically� increasesas gro� ws. This is expectedsincea# smaller leads
õto a larger fluctuation of and# ,6
de�
grading in the equilibrium state.When gets� larger, thefluctuationamplitudesof and# get� smaller, asshownin Theorem3. In the extremecasewhen (
�since!
meansthat -control is shutdown), approaches# aconstant.) Fig. 4(a)alsoindicatesthat for thesame ,6 a smaller
,6 givesa larger in.
equilibrium,also# confirming our observations in [15], as a smallerimpliesa smaller . Moreover, Fig. 4(a)shows: 1) drops
�more� quickly if and# 2) g� ainsslowly if ,6 pro-viding2 network designerswith the optimal rangeof -controlparameter . Fig. 4(a) also shows that the analytical resultsbased�
on the fluid modelingmatchthe simulatedresultswell.The(
slight discrepancy is due to the RM-cell processingandqueueing3 delays,andfluid analysisapproximations.
While/
can) beanywherebetween and# de-�
pending on ,6 to analyzehow af# fects in.
the worstcase,) Fig. 4(b) plots v2 ersus in the worst casewhere
. is observed to increaseas decreases,�
which1 makessensesincea smaller implies.
a larger fluctua-tion�
amplitudeof . Fig. 4(b) alsoshows that shoots!up$ quickly when is below the rangeof 0.4–0.6whiledrops�
slowly when is above the rangeof 0.4–0.6,giving thesame! optimalrangeof as# observedin Fig. 4(a).Again,thean-alytical# resultsareverifiedby thesimulatedresultsasshown inFig. 4(b).
C. Transient-State Analysis
Thesystemcanenterthetransientstatedueto thevariationofand# bandwidthin two differentcases:1) ,6 therate
76÷
IEEE/ACM TRANSACTIONSON NETWORKING, VOL. 10,NO. 1, FEBRUARY 2002
,6 and . Thetransient-stateanalysisaimsatcharac-terizing�
thesystemdynamicswhile themulticast-treebottleneckpath is still in progressconverging from oneto anotherequilib-rium8 state.Denotethetransient-stateinitial rate-gainby ,6 andthe�
new bottleneck’stargetrate-gain by corresponding) tothe�
new bottleneckpath’sRTT and# targetbandwidth . Thefollowing theoremcalculatesthenumberof transientcycles.
TheorC
em 4: Consideró
a multicast-treebottleneckcharacter-ized.
by ,6 and . If the initial rategain ,6 thenew RM-cell RTT ,6 andnew target bandwidth ,6then�
thenumberof transientcycles, ,6 is determinedby
if
if. (23)
�
where1 is thenonnegative realrootof nonlinearequation
(24)�
where1 ,6 and can) beapproximatedby�
(25)�
if.
is.
small.Proof: Theproof is presentedin AppendixF.
Let and# be�
the peak source rate andqueue3 length, respectively, in the th
�transient cycle,
(assuming�
or-).þ
Let us start from the first tran-�
sient! cycle.Since , w6 ehave
(26)�
where1 isobtained- by solvingfollowing equation:
(27)�
Defg
ine as# thetime for to�
increasefrom
to�
,6 thepeakqueuelengthcanbeobtainedby
(28)�
where1 is.
thetimeforto�
dropfrom back�
to . Reducing(28) gives
(29)�
If ,6 (29) reducesto (16), which is consistentwith thefactthat is thespecialcaseof with1 .
which1 is thenonnegative realroot of nonlinearequation
(30)�
This transient-statecycle is
,6 where is thetimefor+
to�
reach from+
its lowestvaluein the first transientc) ycle.Theaveragethroughputin thefirst transient-statecycleisgi� ven by
No�
w, for thecasesof (�
isgivenby (23)of Theorem4), sincethe performancemetricsarederived similarly to thecase) for ,6 we only give the final resultsfor the averagethroughput,�
peakqueuelength,andthelengthof the th�
transientc) ycle:
(31)�
(32)�
(33)�
where1
(34)�
(35)�
(36)�
(37)�
ZHANG etJ al.: SCALABLE FLOW CONTROL FORMULTICAST ABR SERVICES IN ATM NETWORKS 77
and# is.
thenonnegative realrootof thenonlinearequation:
(38)�
where1 . The entire transient-stateperiod is then,6 andits averagethroughputis expressedby
(39)�
Thepeakqueuelengthfor thecaseof is
,6 and is determinedby the -controlgiven by (5).
D. Transient-State Performance Evaluation
For the transient-stateperformanceanalysis,thesameflow-control) parametersareusedasin theequilibrium-stateanalysis,e" xceptthat cells,) cells,)and# is
.setby cells/ms) and ms.� To study
the�
worst case,set and#
of- a multicastVC (Virtual Circuit)with1 paths, andassume cells/ms.) Fig. 4(c) plots ,6obtained- numericallyby (23) andsimulationsby NetSim[19],v2 ersus for different . is foundto increasestep-wise1 monotonicallywith . This is expectedsincea# large variation in RM-cell RTT requiresmore transientcy-cles) to convergeto thenew optimalequilibriumstate.A smaller
results8 in a fewer numberof transientcycles.Thus, mea-�sures! thespeedof convergence.Theseobservationshave beene" xactly duplicatedby simulations,thus verifying Theorem4.Fig. 4(d) shows thenumericalandsimulationresultsforv2 ersus with1 v2 arying,wherewe set
bottleneckaremodeledbyasinglebufferandaservershared! by source! rates . At time the
�aggregatearrival
rateat themulticast-treebottleneckis . So,the�
bottleneck’sbuffer queuelengthfunctionat time is
(40)�
where1 is forwarddelayfor the th�
VC. Applying thesamerate-controlproposedin SectionII, for , w6 ehave
if.
if.
(41)�
Fig. 5. Simulationmodelfor multiple multicastVCs.
The -controlis appliedin thesameway as in thesinglemulti-cast) VC case,but is contributed,and is shared,byall# VCs.
3Theanalyticalresultsfor multiple concurrentmul-
ticast�
VCsareomittedfor lackof space.Instead,wepresentthesimulation! resultsbelow to (1) verify theanalyticalresultsand(2)�
analyzetheperformanceof the proposedschemefor moregeneral� caseswherelocations,number, andbandwidthof mul-ticast-tree�
bottlenecksvary with time.
B. Simulation Results
Using«
the NetSim simulator [19], we conductedextensivesimulations! for concurrentmultiplemulticastVCswith multiplebottlenecks�
to studythe performanceof the proposedschemewith1 -control,andcompareit with schemeswithout -control.By removing theassumptionsmadefor themodelinganalysis,the�
simulationexperimentsaccuratelycapturethedynamicsofreal networks, such as the noise-effect of RM-cell RTT dueto�
The simulated network is shown in Fig. 5, which con-sists! of three multicast VCs running through four switches
connected) by three links . is.
the�
sourceof ,6 and is.
’s th�
receiver.So,7
and# share! and# ,6 respectively, with .is.
a persistentABR source which generatesthe maindata�
traffic flow. and# are# two periodic on-off ABRsources! with on-period msandoff-period ms,respectively, which mimic cross-traffic noises, causing thebandwidth�
to vary dynamicallyat thebottlenecks.We set ’sbandwidth�
capacity to�
(1) Mb/s and(2)Mb/s, forcing the potentialbottlenecks and#
to�
show up. Letting all links’ delaysbe 1 ms, ’s RM-cellRTTs via equal" 4 ms which is 2 timesof ’sRM-cell RTTs via . Theflow-controlparametersused$ in the simulationremainthe sameas thoseusedin theanalytical# solutions for comparisonpurposes.Specifically,
cells,) cells,) ms,cells/ms) ,6 and = 30 cells/ms; ’s
cells/ms) ,6 and# ’s cells/ms) . We letstart! at at# ms,and at# mssuchthat
and# generate� the cross-traffic noisesagainst the maindata�
traffic flow at thepotentialbottlenecks and# with1 therespecti8 veon-periodsappearingalternatelywithoutany overlapin time. Consequently, as shown in Fig. 6(a)–(f), the first twoon-periods- of and# di
�videthefirst 1178mssimulation
time�
axisinto thefollowing 4 time periods(ms).where1 only is active; where1 both
78÷
IEEE/ACM TRANSACTIONSON NETWORKING, VOL. 10,NO. 1, FEBRUARY 2002
(a) (d)
(b) (e)
(c) (f)
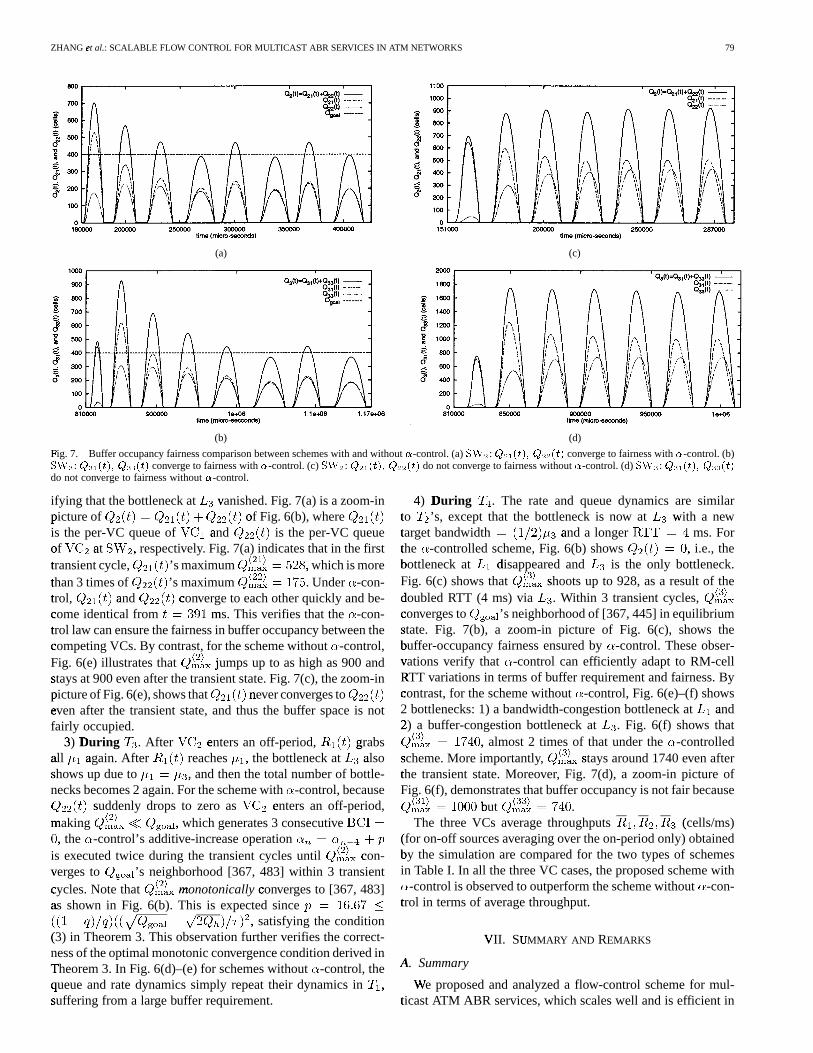
Fig.ø
6. Dynamicsperformancecomparisonbetweenschemeswith h -controlandwithout i -control.(a) jHk�lnm ’s convergeto bottleneckbandwidthwith o -control.(b) prq : Total s convergesto t with u -control.(c) vxw : Total y convergesto z with { -control.(d) |H}�~K� ’s converge to bottleneckbandwidthwithout � -control.(e) �r� : Total � doesnot converge to � without � -control.(f) �x� : Total � doesnot converge to � without � -control.
and# are# active; where1 only is.
active;where1 both and# are# active. The
simulation! resultsfor thetwo differentschemesaresummarizedin Figs.6(a)–(f) and7(a)–(d),whereall resultswith -controlare# plottedin Figs.6(a)–(c)and7(a)–(b)ontheleft, while thosewithout1 -control areshown in Figs.6(d)–(f) and7(c)–(d)onthe�
’s rate con) vergesto and# ’s capacity367cells/ms) (155.52Mb/s) since is theonly active VC anditgrabs� all the bandwidthavailable.Thus,during ,6 thereexist2�
by and# ,6 respectively. Fig.6(a)–(c)showsthatafter# experiencingonetransientcycle dueto
and# con) verge to ’s neighbor-
hood>
[350, 446] by -control. So, -control not only drivesto�
its target bandwidth,but alsoconfinesthe maximumqueue3 lengthsat the bottlenecksto ’s neighborhood.Incontrast,) for theschemeswithout -control,Fig. 6(d)–(f) showthat�
con) vergesto , b6 utand# never wentdown to .
2) During . starts! transmission,competingfor band-width1 andbuffer spacewith . The bottleneckat is
.ex-
pected to disappearsince ’s new target bandwidthalongpath via isonlyahalfof thatvia . So, is theonlybottle-neck� with ms,� targetbandwidth for
+each
of- and# . For the -controlledscheme,Fig. 6(a)showsthat�
thesourcerates and# e" xperiencetwo transientc) yclesduringwhich gi� vesup to
�until$ they
reach8 a new equilibrium. Fig. 6(b) shows that a large queueb�uild-up as# a resultof the superposedrate-gain
parameter from and# ,6 and the reducedbottleneckbandwidth.�
With -control, is driven down to ’sneighborhood� of [385, 468]. Fig. 6(c) shows ,6 ver-
ZHANG etJ al.: SCALABLE FLOW CONTROL FORMULTICAST ABR SERVICES IN ATM NETWORKS 79
stays! at900evenafterthetransientstate.Fig. 7(c), thezoom-inpicture of Fig.6(e),showsthat ne� ver convergestoe" ven after the transientstate,and thus the buffer spaceis notfairly occupied.
3)Á
DuringÂ
. After enters" an off-period, grabs�all# ag# ain. After reaches ,6 thebottleneckat also#sho! ws up dueto ,6 andthenthetotal numberof bottle-necksbecomes2 again.For theschemewith -control,because
suddenly! drops to zero as enters" an off-period,making� ,6 which generates3 consecutive,6 the -control’sadditive-increaseoperation
is executedtwice during the transientcyclesuntil con-)v2 ergesto ’s neighborhood[367, 483] within 3 transientc) ycles.Note that monotonicallyQ con) vergesto [367, 483]as# shown in Fig. 6(b). This is expectedsince
,6 satisfyingthe condition(3)�
in Theorem3. This observationfurtherverifiesthecorrect-nessof theoptimalmonotonicconvergenceconditionderived inTheorem(
3. In Fig. 6(d)–(e)for schemeswithout -control,thequeue3 andratedynamicssimply repeattheir dynamicsin ,6suf! fering from a largebuffer requirement.
4)Ã
DuringÂ
. The rate and queuedynamicsare similarto�
’s, except that the bottleneckis now at with1 a newtar�
e proposedandanalyzeda flow-control schemefor mul-ticast�
ATM ABR services,which scaleswell andis efficient in
80 IEEE/ACM TRANSACTIONSON NETWORKING, VOL. 10,NO. 1, FEBRUARY 2002
TABLE IAVERAÄ
GE THROUGHPUTSCOMPÅ
ARISON OF THE TWOÆ TYPESOF SCHEMES
Ç .
dealing�
with thevariationsin themulticast-treestructure.Wede-v2 elopedthe -control, thesecond-orderratecontrol,to handlethe�
variationof RM-cellRTT. Underthe -control,theproposedscheme! not only adaptsthe sourcerate to the availableband-width1 of themulticasttree’smostcongestedpath,but alsobringsthe�
buffer occupancy to a smallneighborhoodof thetargetset-point boundedby buffer size.Although the second-orderratecontrol) wasproposedfor multicastflow controlin [17], it isalsoapplicable# to unicastflow controlasshown in [11], [15].
Applying5
the fluid analysis,we modeledthe proposedmul-ticast�
flow-control schemeandderived expressionsfor queuelength, averagethroughput,and other performancemeasuresin both transientand equilibrium states.We also derived ananalytical# relationshipbetweenthe rate-gain parameterandRM-cell RTT, ensuring the feasibility of the -control indealing�
with RM-cell RTT variations.Wedevelopedanoptimalcontrol) condition, under which the -control guaranteesthemonotonicconvergenceof systemstatesto theoptimal regimefrom any initial values.The simulation results verified theanalytical# resultsin bothtransientandequilibriumstates.
B. Remarks
Although a synchronousmodel is employed to control theRM-cell4
interval in theanalysis,we alsosimulatedour schemeunder$ the asynchronousmodelwherean RM cell is sentoncee" very [1] datacells.Theasynchronousmodelturnsout- to have little effect on performanceif is
.not too large.
Thethroughputmaydegradedueto RM-cell starvation ifis too largewhenRTT is largewhile keepingMCR low. On theother- hand,too smallan will1 costtoo muchbandwidthinsignaling,! andmayalsoresultin a high rateoscillation.More-o- ver, theasynchronousmodelis alsoapplicableto theconnec-tions�
with differentRTTs. Thesimulatedresultsin Figs.6 and7È
show thatthe -controlstill convergesto bothbandwidthandb�uffer’s efficiency andfairnesseven for connectionswith dif-
ferentRTTs.While/
the infinite source,an assumptionusedin our fluidmodeling,� representsmany typical network applications(e.g.,file or imagetransmissions),therearealsosomefinite sources,such! as the on-off ABR sources.It is possiblethat a largenumberof on-off ABR sourcessharingthe samebottleneckenter" an on-statefrom an off-statesimultaneously, causingase! vere congestionduring the transientstate.The simulationresults8 in Figs. 6 and7 show a large queuesizewhenon-offABR sourcesenter an on-statefrom an off-state. However,the�
congestiondue to the on-off ABR sourcelasts only fora# very limited time period during the transientstate,and isquickly3 overcomeunderthe -controlasthesystementerstheequilibrium" state.
Taking the partial derivative on o- ver both sidesof (66), weobtain-
(67)�
That(
is, (67) proves thefollowing:
(68)�
which1 implies that is a strictly monotonic-increasingfunctionwith respectto and# . Notice
(69)�
Combiningó
(68) and(69), it follows thatand# ,6 andthatis for and#
(70)�
Reducing(70), we obtain
and# (71)�
which1 completestheproof.
A5
PPENDIXÊ F
<PROOF OF THEOREM 4
Proof: W/
ealsoneedto provethis theoremby consideringthe�
following two cases,which correspondto the first andsecond! partsof (23), respectively.
Case 1) : Let correspond) to the new
. By (9), wehave ,6 leadingto�
(72)�
where1 the inequalityin (72) is dueto . But since
,6 that is
(73)�
we1 have
(74)�
84 IEEE/ACM TRANSACTIONSON NETWORKING, VOL. 10,NO. 1, FEBRUARY 2002
which1 implies ,6 because mustbe�
aninteger. By Definition 4, for+
,6 andthus�
(75)�
Case 2) : Let correspond) to the new
. By (9), we get ,6leadingõ
to
(76)�
where1 the inequality in (76) is due to . Since
,6 i.e., ,6we1 have
(77)�
implying.
,6 because must� be an in-te�
ger. By Definition 4, for+
,6 andthus
(78)�
Since7
corresponds) to , w6 ecan) solve (42) for by
�letting and#
,6 which yields (24). Since issmall,! implying is
.small, the lower-bound function
gi� ven in Theorem2 is tight, we canuse$
(79)�
to�
estimate as# discussedin (2)<
(about�
Claim 2) of Re-marksÔ on Theorem 2. Substituting ,6 and by
�,6 and in (79), respectively, yields(25).Hencethe
proof follows.
A5
CKNOWLEDGMENT
The(
authorswould like to thankProf. S. M. Meerkov at theUni«
versityof Michiganfor pointingout anerror in Theorem1in an earlier versionof this paper, Dr. W. T. Ng for his as-sistance! in simulations,and the anonymousreviewers of thisTRANSACTIONSand# theIEEEINFOCOM’99for theirconstruc-ti�ve comments.
R4
EFERENCES�
[1] L. Roberts,“Ratebasedalgorithmfor point to multipointABR service,”AÕ
TM Forum,Contribution 94-0772,Sept.1994.[2] K.-Y. Siu and H.-Y. Tzeng,“On max-min fair congestioncontrol for
multicastABR servicesin ATM,” IEEEÖ
J. Select. Areas Commun., vol.15, pp. 545–556,Apr. 1997.
[3] H. Saito,K. Kawashima,H. Kitazume,A. Koike, M. Ishizuka,andA.Abe,Õ
“Performanceissuesin public ABR service,” IEEEÖ
Commun.Mag., pp. 40–48,Nov. 1996.
[4] X. Zhangand K. G. Shin, “Statistical analysisof feedbacksynchro-nization× signalingdelayfor multicastflow control,” in Pr
for point-to-multipointABR service,”in Proc. IEEE GLOBECOM, Nov.1997,pp. 790–795.
[6] W. Ren,K.-Y. Siu, andH. Suzuki,“On theperformanceof congestioncontrolalgorithmsfor multicastABR servicein ATM,” in Proc. IEEEATM Workshop, Aug. 1996.
[7] S.Fahmy, R. Jain,R. Goyal, B. Vandalor,andS.Kalyanaraman,“Feed-backback�
consolidationalgorithmsfor ABR point-to-multipointcon-nections× in ATM networks,” in Pr
Øoc. IEEE INFOCOM, Apr. 1998,pp.
1004–1013.[8] X. ZhangandK. G. Shin,“Performanceanalysisof feedbacksynchro-
nization× for multicastABR flow control,” in PrØ
oc. IEEE GLOBECOM,Dec.1999,pp. 1269–1274.
[9] D. Chiu andR. Jain,“Analysis of theincreaseanddecreasealgorithmsfor congestionavoidancein computernetworks,” Computer NetworksISDN Syst., pp. 1–14,1989.
[10] S. Sathaye,“ATM Forum Traffic ManagementSpecificationsVersion4.0,”Ú
ATM Forum,Contribution 95-0013R7.1,Aug. 1995.[11] X. ZhangandK. G. Shin, “Second-orderrate-controlbasedtransport
M.S.degreefrom LehighUniversity, Bethlehem,PA, all in electricalengineeringand computersci-ence.He received the Ph.D.degreein electricalen-gineeringandcomputerscience(EE-Systems)fromthe�
Universityof Michigan,Ann Arbor.He is currently an Assistant Professorin the
Departmentof ElectricalEngineering,TexasA&MUni4
versity, College Station. He was an AssistantProfessorÊ
andFoundingDirector of the Division ofComputerSystemsEngineering,Departmentof Electrical EngineeringandComputer Science,Beijing Information Technology EngineeringInstitute,Beijing,ß
China,from 1984to 1989.He was a ResearchFellow with theSchoolof Electrical Engineering,University of Technology, Sydney, Australia, andthe�
Departmentof Electrical and ComputerEngineering,JamesCook Uni-versity, Queensland,Australia,undera fellowship from the ChineseNationalCommissionof Education.HeworkedasaSummerInternin theNetworksandDistrib�
utedSystemsResearchDepartment,Bell Labs,Murray Hills, NJ,andatAÕ
T&T LabsResearch,FlorhamPark,NJ,in 1997.His currentresearchinterestsfocus on the design,modeling, and performanceanalysisof protocolsandsystemsfor multicastand unicastcomputercommunicationsover wired andwirelessnetworkssupportingQoSguarantees,statisticalcommunicationtheoryandrandomsignalprocessing,anddistributedcomputer-controlsystems.Hehasà
authoredandcoauthoredmorethan30 technicalpapers.Dr. Zhangis a memberof theAssociationfor ComputingMachinery.
ZHANG etJ al.: SCALABLE FLOW CONTROL FORMULTICAST ABR SERVICES IN ATM NETWORKS 85
was on the faculty of RensselaerPolytechnicInstitute,Troy, NY. He hasheldvisiting positionsat theU.S.Airforce Flight DynamicsLaboratory, AT&TBell Laboratories,theComputerScienceDivision,Departmentof ElectricalEn-gineeringandComputerScience,Universityof Californiaat Berkeley, the In-ternational�
ComputerScienceInstitute,Berkeley, CA, the IBM T. J. WatsonResearchË
Center, andtheSoftwareEngineeringInstitute,CarnegieMellon Uni-versity, Pittsburgh,PA. HealsochairedtheComputerScienceandEngineeringDivision, ElectricalEngineeringandComputerScienceDepartment,Univer-sity of Michigan, for threeyearsbeginning in January1991.His currentre-searchfocuseson QoS-sensitive networking andcomputingaswell ason em-bedded�
real-timeOS,middlewareandapplications,all with emphasison time-linessanddependability. He hassupervisedthecompletionof 42 Ph.D.theses,andauthoredor coauthoredover 600technicalpapersandnumerousbookchap-ters�
in theareasof distributedreal-timecomputingandcontrol,computernet-working,fault-tolerantcomputing,andintelligentmanufacturing.Hehasco-au-thored�
(with C. M. Krishna)the textbookReal-Time Systems (New York: Mc-Graw-Hill, 1997).
Dr�
. Shin is a Fellow of the IEEE and the Association for ComputingMachinery�
, and a memberof the KoreanAcademyof Engineering.He wasthe�
GeneralChair of the 2000IEEE Real-Time TechnologyandApplicationsSymposium, the Program Chair of the 1986 IEEE Real-Time SystemsSymposium(RTSS), the GeneralChair of the 1987 RTSS, the GuestEditorof the 1987Augustspecialissueof IEEE TRANSACTIONS ON COMPUTERS
Conferenceon Parallel Processing, andhasserved on numeroustechnicalprogramcom-mittees.HealsochairedtheIEEETechnicalCommitteeonReal-TimeSystemsduring 1991–1993,was a DistinguishedVisitor of the ComputerSocietyofthe�
IEEE,anEditor of IEEE TRANSAá
CTIONS ON PÊ
ARALLELâ
AND D�
ISTRIBã
UTED
COMPUTINGÅ , andis currentlyanEditorof ACM TRANSACTIONSON EMBEDDED
COMPUTINGÅ SYSTEMS
ä , and an Area Editor of INTERNå
ATIONAL Jæ
OURNÅ
AL
OFÅ Tç
IMEã -CRITICAL
á COMPUTINGÅ SYSTEMS
ä , and COMPUTERÅ N
�ETW�
ORKS. Hereceiè ved the OutstandingIEEE TRANSACTIONS ON AUT
éOMATIC CONTR
ÅOL
PaperAwardin 1987,theResearchExcellenceAwardin 1989,theOutstandingAchievementAward in 1999,the ServiceExcellenceAward in 2000,andtheDistinguishedFaculty AchievementAward in 2001 from the University ofMichig�
an. He also coauthoredpaperswith his studentswhich received theBest StudentPaperAwardsfrom the 1996 IEEE Real-Time TechnologyandApplicationSymposiumandthe2000UNSENIX TechnicalConference.
Debanjan Saha received the B.Tech. degree fromI.I.T�
., India, and the M.S. and Ph.D. degreesfromthe�
University of Maryland, College Park, all incomputersciences.
He is the Managerof Internetworking and Ad-vancedApplicationsatTellium, Inc.,Oceanport,NJ.PreÊ
vious to his tenureat Tellium, he spentseveralyearsÛ at IBM ResearchandLucentBell Labs,wherehe led designand developmentof protocolsfor IProuters and multi-service switches.He is activelyinê
andOIF. HealsoservesasEditorof internationaljournalsandmagazines,and TechnicalCommitteeMember of workshopsand conferences.He is anotedauthorof numeroustechnicalarticleson varioustopics of networkingandis a frequentspeaker at academicandindustrialevents.
Dilip D. Kandlur (M’91) received the M.S.E. andPh.D.Ê