IMPLEMENTATION ISSUES IMPLEMENTATION ISSUES REGARDING A 3D ROBOT – REGARDING A 3D ROBOT – BASED LASER SCANNING BASED LASER SCANNING SYSTEM SYSTEM Theodor Borangiu, Anamaria Dogar, Theodor Borangiu, Anamaria Dogar, Alexandru Dumitrache Alexandru Dumitrache University Politehnica of Bucharest University Politehnica of Bucharest Dept. of Automation and Applied Informatics Dept. of Automation and Applied Informatics
Transcript
IMPLEMENTATION ISSUES IMPLEMENTATION ISSUES REGARDING A 3D ROBOT – REGARDING A 3D ROBOT – BASED LASER SCANNING BASED LASER SCANNING
SYSTEMSYSTEM Theodor Borangiu, Anamaria Dogar, Theodor Borangiu, Anamaria Dogar,
Alexandru DumitracheAlexandru DumitracheUniversity Politehnica of BucharestUniversity Politehnica of Bucharest
Dept. of Automation and Applied InformaticsDept. of Automation and Applied Informatics
OverviewOverview
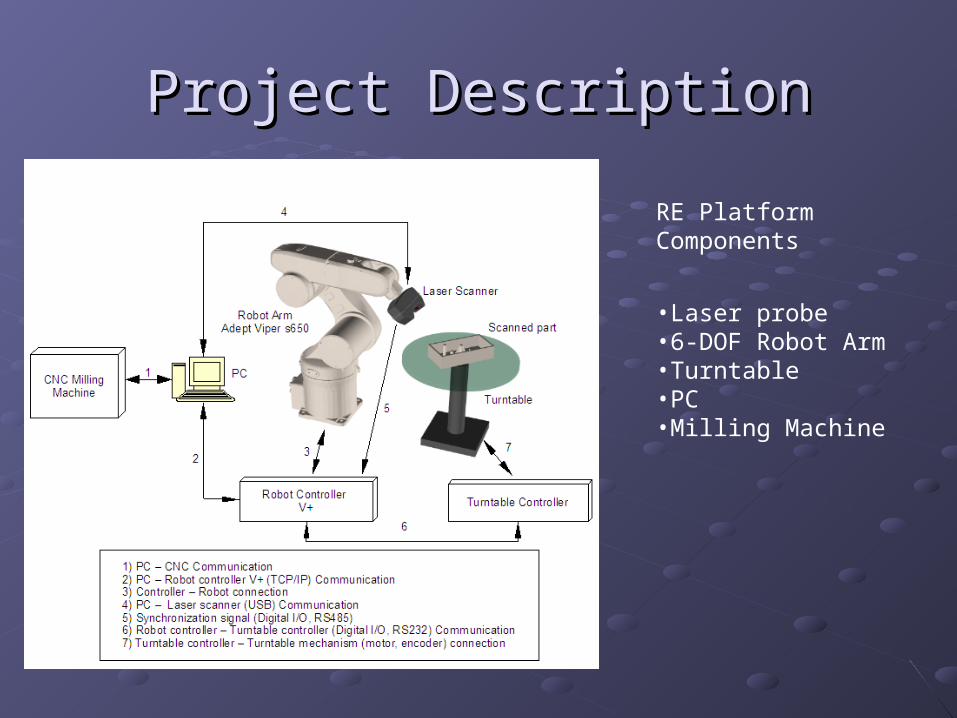
Project DescriptionProject Description
Integrating SLP with Robotic ArmIntegrating SLP with Robotic Arm
Integrating SLP with Robotic ArmIntegrating SLP with Robotic Arm• The Data acquisition module communicates with the laser probe, being able to take measurements.
• Encoder latching server module, receives the encoder readings from the robot arm and rotary table controllers using a TCP/IP connection.
• The Scanning trajectory generator is able to compute either predefined or adaptive scanning paths, based on the type and approximate dimensions of the scanned workpiece
Calibration IssuesCalibration Issues
Robot-Laser Probe Transformation
There are two transformation matrices that are only known with approximation.
• the transformation between the 6th link of the robot and the laser probe, established by robot – laser probe calibration
•the transformation between the rotary table and robot base, determined by robot – rotary table calibration
Defined ConstraintsDefined Constraints
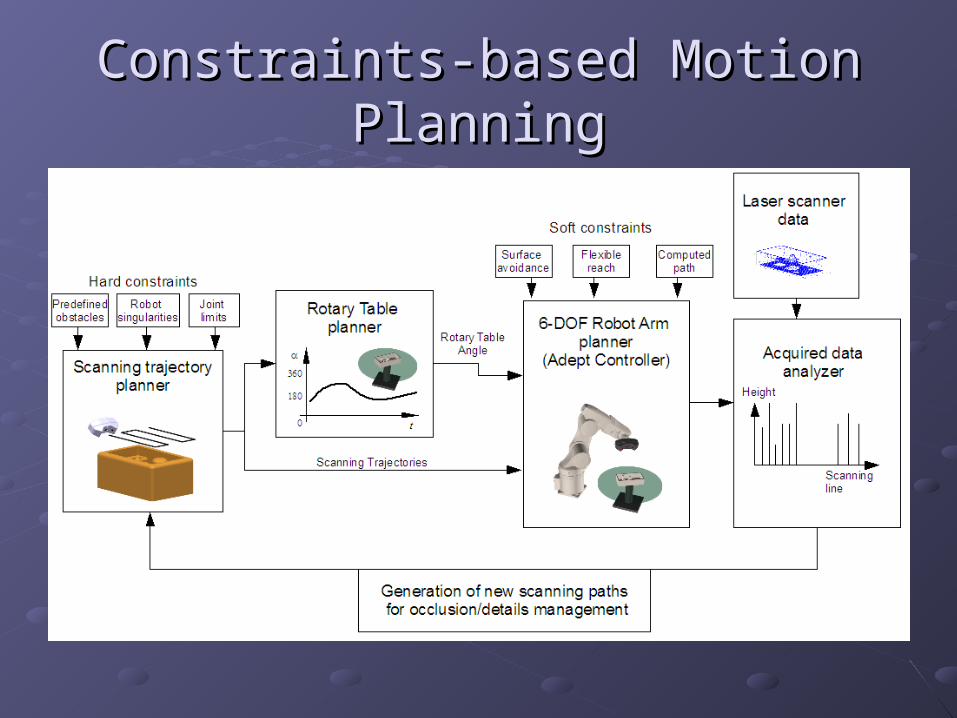
Hard ConstraintsHard Constraints::known obstacles in the robot workspaceknown obstacles in the robot workspacearticulated robot singularities articulated robot singularities articulated robot joint angle limits.articulated robot joint angle limits.
Soft ConstraintsSoft Constraints::surface avoiding (keeping the minimum allowed surface avoiding (keeping the minimum allowed scanning distance towards the modelled object)scanning distance towards the modelled object)flexible reach (avoiding “un-comfortable” flexible reach (avoiding “un-comfortable” positions of the robot arm) positions of the robot arm) following the computed path.following the computed path.
Input data - scanning toolpaths Input data - scanning toolpaths Output data - joint values of the robotic arm and the rotary table Output data - joint values of the robotic arm and the rotary table angle angle
The problem presented here is the inverse kinematics for a 7-DOF The problem presented here is the inverse kinematics for a 7-DOF mechanism.mechanism.
The computed solution has to satisfy the following requirements:The computed solution has to satisfy the following requirements:minimize the accelerations and limit the speed of the rotary table;minimize the accelerations and limit the speed of the rotary table;avoid collisions with any obstacles.avoid collisions with any obstacles.
It is proposed a two stage It is proposed a two stage scanning strategy.scanning strategy.In the first stage of the In the first stage of the scanning process, there is no scanning process, there is no information regarding the information regarding the object; this laser scanning will object; this laser scanning will be done at high speed rates, be done at high speed rates, which implies a low resolution which implies a low resolution data set. data set. In the second stage of the In the second stage of the scanning process, there is an scanning process, there is an approximate model of the approximate model of the object and it can be computed object and it can be computed an efficient scanning strategy. an efficient scanning strategy.
There appears an occluded region due to one vertical wall, for which a supplementary trajectory must be generated. If in the first stage of the scanning process, the obtained cloud point is not analyzed, the next data acquiring pose is X
In order to generate an optimal In order to generate an optimal strategy for the second stage strategy for the second stage of the scanning process, the of the scanning process, the occlusions must be analyzed occlusions must be analyzed in the first stage. So a possible in the first stage. So a possible solution for the proposed solution for the proposed profile is shown in the Figure, profile is shown in the Figure, based on the following rules:based on the following rules:if there is an occluded area, if there is an occluded area, generate trajectory for generate trajectory for scanning this area;scanning this area;otherwise, generate the next otherwise, generate the next path so that the up-left corner path so that the up-left corner of the trapeze have the same of the trapeze have the same horizontal coordinate as the horizontal coordinate as the last point detected in the last point detected in the previous scan.previous scan.
In the second stage there is available an approximate model of the In the second stage there is available an approximate model of the scanned object. This model is used for modeling the optimal scanned object. This model is used for modeling the optimal strategy that will lead to the complete model of the object.strategy that will lead to the complete model of the object.In the In the a)a) case the intersection of the two trapezes sides on the case the intersection of the two trapezes sides on the profile surface does not create any occlusions. In the profile surface does not create any occlusions. In the b)b) case the case the intersection of the trapezes sides on the mould surface will lead to intersection of the trapezes sides on the mould surface will lead to an occlusion, in this case the trajectory must be placed so to be an occlusion, in this case the trajectory must be placed so to be tangent to the vertical wall. tangent to the vertical wall.
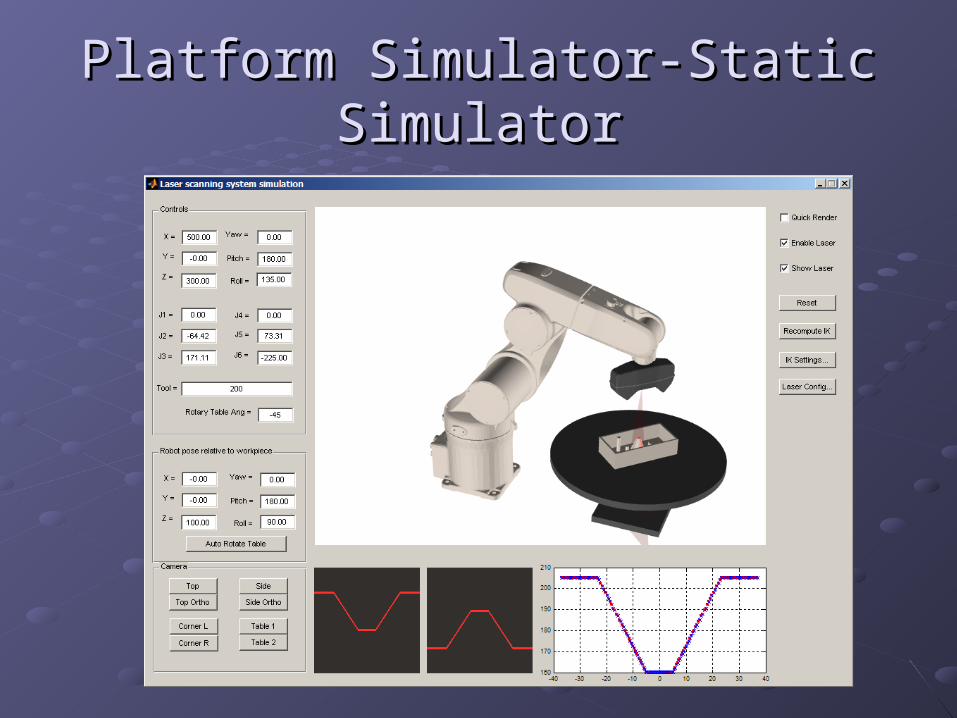
The static simulation module allows specifying the robot The static simulation module allows specifying the robot pose, using one of the three input methods:pose, using one of the three input methods:specify the angular values for each joint and for the specify the angular values for each joint and for the rotary table (direct kinematics)rotary table (direct kinematics)specify the position in Cartesian coordinates and the specify the position in Cartesian coordinates and the orientation in ZYZ’ Euler angles, in the robot’s reference orientation in ZYZ’ Euler angles, in the robot’s reference frame (inverse kinematics with respect to robot)frame (inverse kinematics with respect to robot)specify the angle of the rotary table, and the position and specify the angle of the rotary table, and the position and the orientation of the robot end point in the rotary table’s the orientation of the robot end point in the rotary table’s reference frame (inverse kinematics with respect to reference frame (inverse kinematics with respect to rotary table)rotary table)
Motion Simulation ModuleMotion Simulation Module
Motion Simulation ModuleMotion Simulation Module
The motion simulation module lets the The motion simulation module lets the user simulate and analyze the behaviour user simulate and analyze the behaviour of the robot using a sequence of user-of the robot using a sequence of user-defined trajectories. defined trajectories.
The user interface has an editor for the The user interface has an editor for the motion sequence, and controls for motion sequence, and controls for generating the animation.generating the animation.
ExampleExample
ConclusionsConclusions
An essential feature of the planning algorithm An essential feature of the planning algorithm will be its ability to run in real time, while the will be its ability to run in real time, while the scanning process takes place. scanning process takes place. The close-future work includes developing the The close-future work includes developing the algorithms for complex 3D path following, algorithms for complex 3D path following, optimizing and speed – up methods of the optimizing and speed – up methods of the implemented algorithms.implemented algorithms. This work has been done in the Robotics and AI This work has been done in the Robotics and AI Laboratory of the Faculty of Automatic Control Laboratory of the Faculty of Automatic Control and Computers.and Computers.www.scanrobot.cimr.pub.rowww.scanrobot.cimr.pub.ro