Infinite Impulse Response Filters. Digital IIR Filters. Infinite Impulse Response (IIR) filter has impulse response of infinite duration, e.g. How to implement the IIR filter by computer? Let x [ k ] be the input signal and y [ k ] the output signal,. Z. - PowerPoint PPT Presentation
Prof. Brian L. Evans Dept. of Electrical and Computer Engineering The University of Texas at Austin EE345S Real-Time Digital Signal Processing Lab Fall 2006 Lecture 6 Infinite Impulse Response Filters
Transcript
Prof. Brian L. Evans
Dept. of Electrical and Computer Engineering
The University of Texas at Austin
EE345S Real-Time Digital Signal Processing Lab Fall 2006
Lecture 6
Infinite Impulse Response Filters
6 - 2
Digital IIR Filters
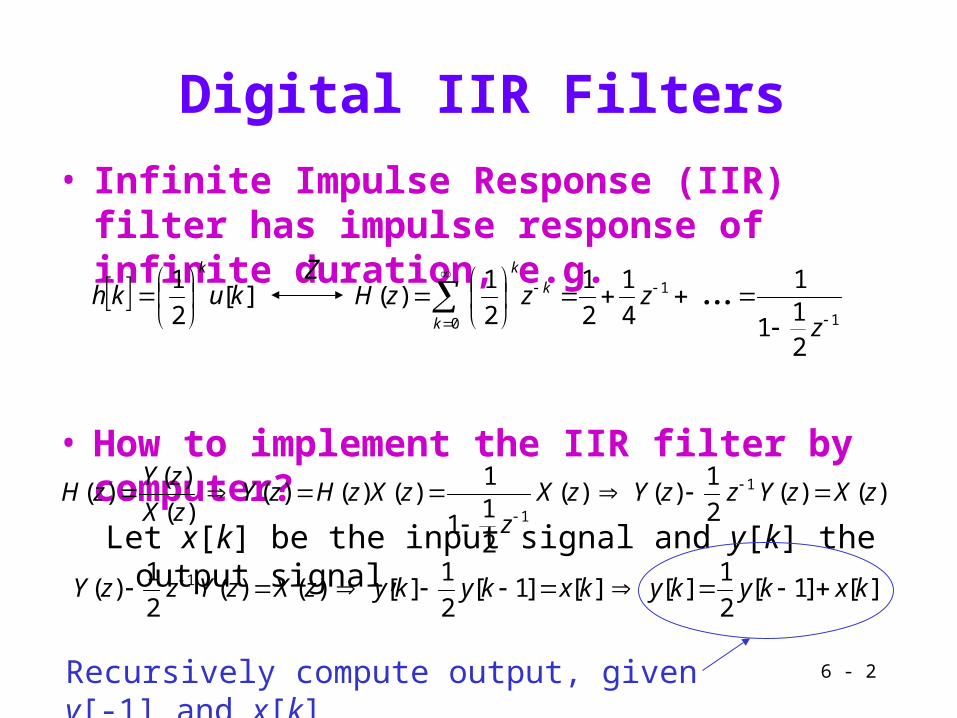
• Infinite Impulse Response (IIR) filter has impulse response of infinite duration, e.g.
• How to implement the IIR filter by computer?Let x[k] be the input signal and y[k] the output signal,
][2
1kukh
k
1
1
0
21
1
1
4
1
2
1
2
1 )(
zzzzH k
k
k
...Z
)()( 2
1)( )(
21
1
1)()()(
)(
)()( 1
1
zXzYzzYzXz
zXzHzYzX
zYzH
][]1[2
1][ ][]1[
2
1][ )()(
2
1)( 1 kxkykykxkykyzXzYzzY
Recursively compute output, given y[-1] and x[k]
6 - 3
Different Filter Representations
• Difference equation
Recursive computation needs y[-1] and y[-2]
For the filter to be LTI,y[-1] = 0 and y[-2] = 0
• Transfer functionAssumes LTI system
• Block diagram representation
Second-order filter section (a.k.a. biquad) with 2 poles and 0 zeros
][]2[8
1]1[
2
1][ kxkykyky
x[k] y[k]
UnitDelay
UnitDelay
1/2
1/8
y[k-1]
y[k-2]
21
21
81
21
1
1
)(
)()(
)()(8
1)(
2
1)(
zzzX
zYzH
zXzYzzYzzY
Poles at –0.183 and +0.683
6 - 4
Digital IIR Biquad
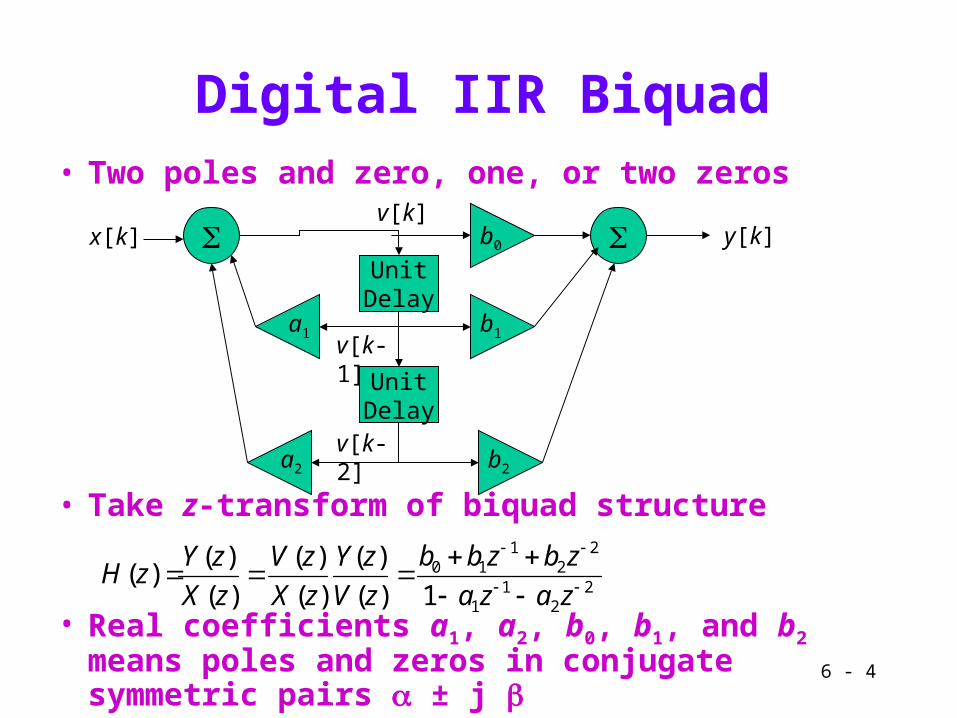
• Two poles and zero, one, or two zeros
• Take z-transform of biquad structure
• Real coefficients a1, a2, b0, b1, and b2 means poles and zeros in conjugate symmetric pairs ± j
22
11
22
110
1)(
)(
)(
)(
)(
)()(
zaza
zbzbb
zV
zY
zX
zV
zX
zYzH
x[k]
UnitDelay
UnitDelay
v[k-1]
v[k-2]
v[k]
b2
a1
a2
b1
y[k]b0
6 - 5
Digital IIR Filter Design
• Poles near unit circle indicate filter’s passband(s)
• Zeros on/near unit circle indicate stopband(s)
• Biquad with zeros z0 and z1, and poles p0 and p1
Transfer function
Magnitude response
10
10 )(pzpz
zzzzCzH
10
10
)(
pepe
zezeCeH
jj
jjj
10
10
)(
pepe
zezeCeH
jj
jj
j
Distance from point on unit circle ej and pole location p0
|a – b| is distance between complex numbers a and b
6 - 6
Digital IIR Biquad Design Examples
• Transfer function
• Poles (X) & zeros (O) in conjugate symmetric pairs– For coefficients in unfactored transfer function to be real
• Filters below have what magnitude responses?
Re(z)
Im(z)
XOO X Re(z)
Im(z)
O
OX
X
Re(z)
Im(z)O
O
X
X
1
11
0
11
10
10
10
11
11 )(
zpzp
zzzzC
pzpz
zzzzCzH
lowpasshighpass bandpass bandstop
allpass notch?
Poles have radius r zeros have radius 1/r
6 - 7
A Direct Form IIR Realization
• IIR filters having rational transfer functions
• Direct form realization– Dot product of vector of N +1
coefficients and vector of currentinput and previous N inputs (FIR section)
– Dot product of vector of M coefficients and vector of previous M outputs (FIR filtering of previous output values)
– Computation: M + N + 1 MACs– Memory: M + N words for previous inputs/outputs and
M + N + 1 words for coefficients
MM
NN
zaza
zbzbb
zA
zB
zX
zYzH
1
)(
)(
)(
)()(
11
110
...
N
n
nn
M
m
mm zbzXzazY
01
)( 1 )(
M
mm
N
nn mkyankxbky
10
][ ][ ][
6 - 8
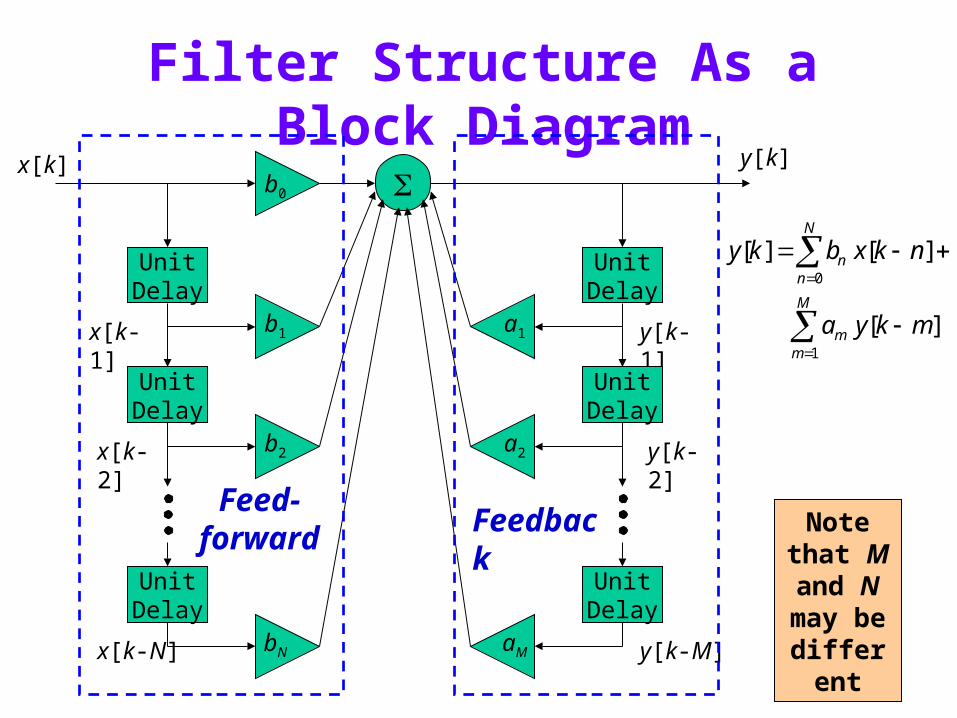
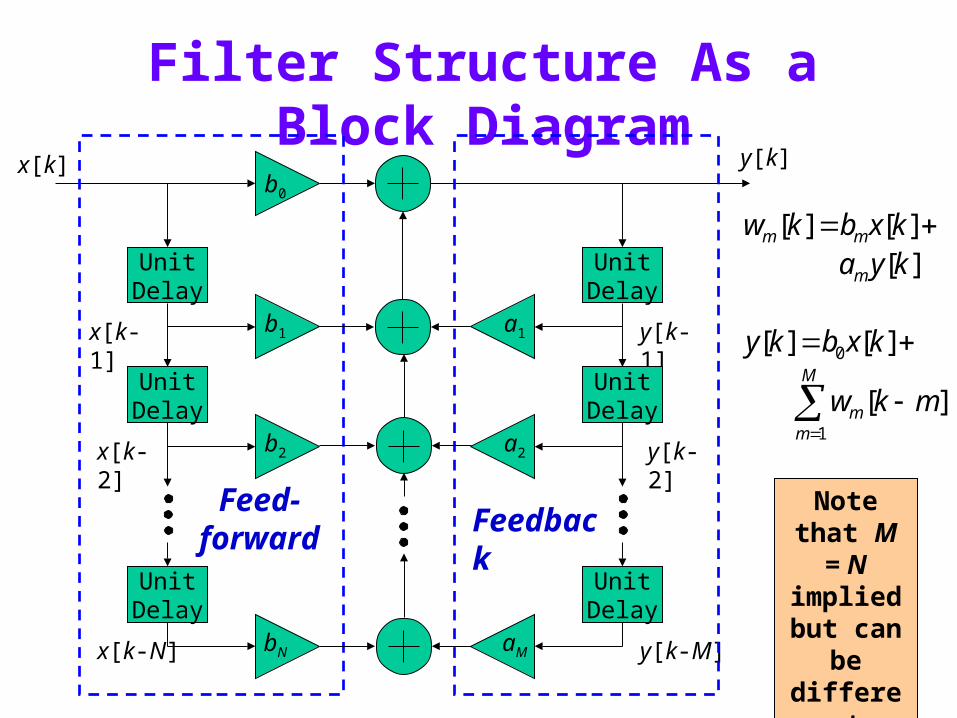
Filter Structure As a Block Diagram
M
mm
N
nn
mkya
nkxbky
1
0
][
][ ][
x[k] y[k]
y[k-M]
x[k-1]
x[k-2] b2
b1
b0
UnitDelay
UnitDelay
UnitDelay
x[k-N] bN
Feed-forward
a1
a2
y[k-1]
y[k-2]
UnitDelay
UnitDelay
UnitDelay
aM
Feedback Note that M and N may be
different
6 - 9
Another Direct Form IIR Realization
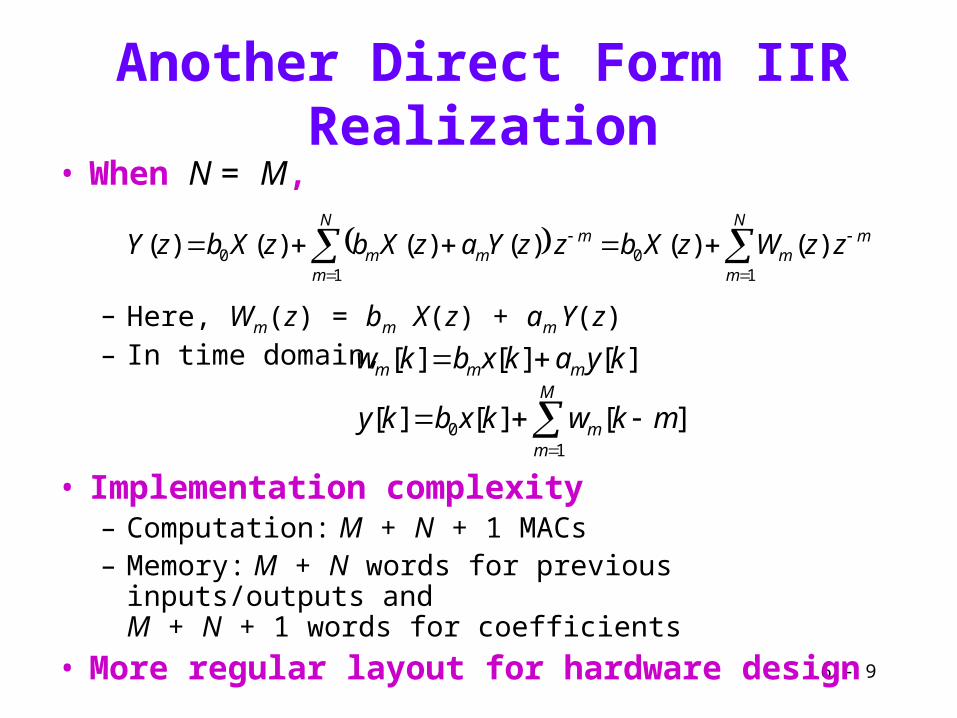
• When N = M,
– Here, Wm(z) = bm X(z) + am Y(z)– In time domain,
• Implementation complexity– Computation: M + N + 1 MACs– Memory: M + N words for previous inputs/outputs and
M + N + 1 words for coefficients
• More regular layout for hardware design
mN
mm
mN
mmm zzWzXbzzYazXbzXbzY
)()( )()()()(
10
10
M
mm
mmm
mkwkxbky
kyakxbkw
10 ][][][
][][][
6 - 10
Filter Structure As a Block Diagramx[k]
x[k-1]
x[k-2] b2
a1
a2
b1
y[k]b0
UnitDelay
UnitDelay
UnitDelay
x[k-N] bN
y[k-1]
y[k-2]
UnitDelay
UnitDelay
UnitDelay
y[k-M]aM
Feed-forward
Feedback
M
mm
m
mm
mkw
kxbky
kyakxbkw
1
0
][
][][
][ ][][
Note that M = N
implied but can be different
6 - 11
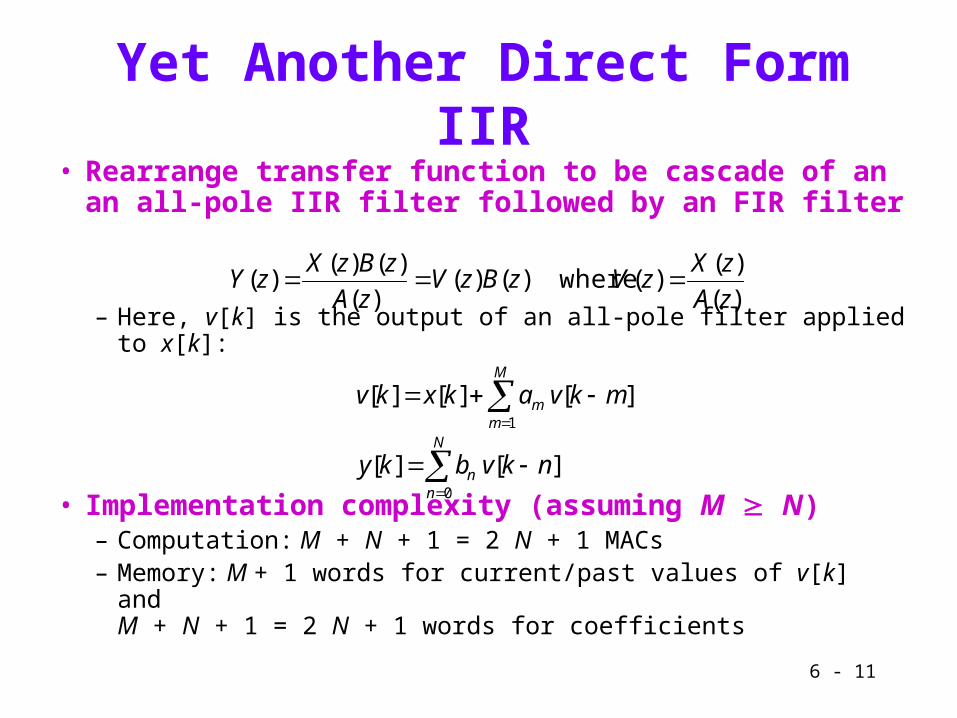
Yet Another Direct Form IIR
• Rearrange transfer function to be cascade of an an all-pole IIR filter followed by an FIR filter
– Here, v[k] is the output of an all-pole filter applied to x[k]:
• Implementation complexity (assuming M N)– Computation: M + N + 1 = 2 N + 1 MACs– Memory: M + 1 words for current/past values of v[k] and
M + N + 1 = 2 N + 1 words for coefficients
)(
)()( where)()(
)(
)()()(
zA
zXzVzBzV
zA
zBzXzY
N
nn
M
mm
nkvbky
mkvakxkv
0
1
][ ][
][ ][][
6 - 12
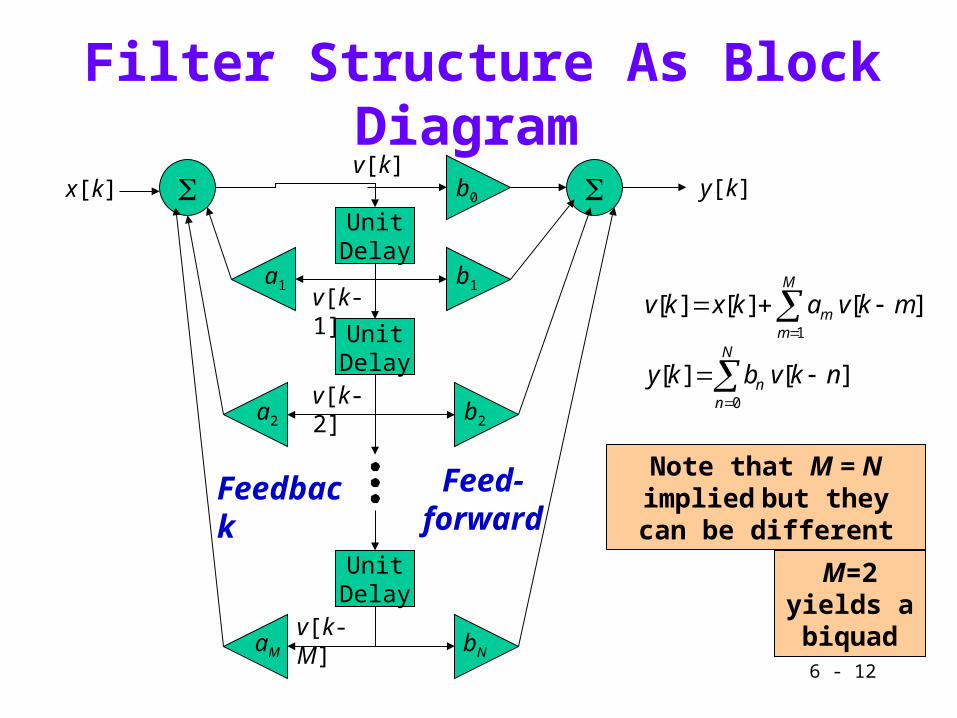
Filter Structure As Block Diagram
x[k]
UnitDelay
UnitDelay
v[k-1]
v[k-2]
v[k]
b2
a1
a2
b1
y[k]b0
UnitDelay
v[k-M]bNaM
Feed-forward
Feedback
M=2 yields a biquad
N
nn
M
mm
nkvbky
mkvakxkv
0
1
][ ][
][ ][][
Note that M = N implied but they can be different
6 - 13
Demonstrations (DSP First)
• Web site: http://users.ece.gatech.edu/~dspfirst
• Chapter 8: IIR Filtering Tutorial (Link)• Chapter 8: Connection Betweeen the Z and
Frequency Domains (Link) • Chapter 8: Time/Frequency/Z Domain Moves for
• A digital filter is bounded-input bounded-output (BIBO) stable if for any bounded input x[k] such that | x[k] | B < , then the filter response y[k] is also bounded | y[k] | B <
• Proposition: A digital filter with an impulse response of h[k] is BIBO stable if and only if
– Any FIR filter is stable– A rational causal IIR filter is stable if and only if its poles
lie inside the unit circle
|][| khn
Review
6 - 15
azza
kuaZ
k
for 1
1
1
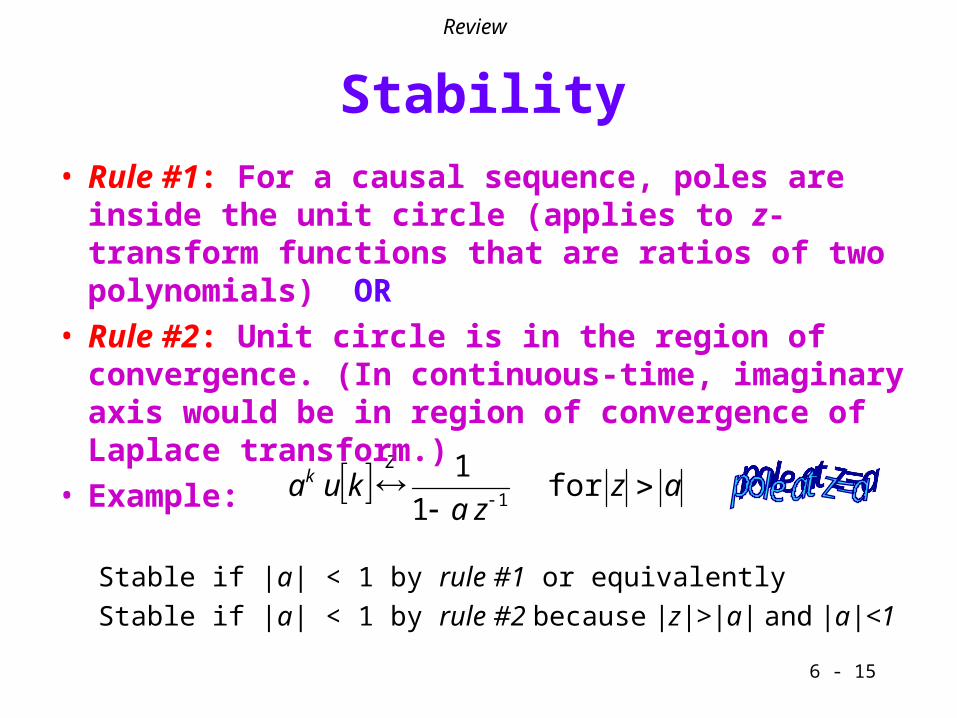
Stability
• Rule #1: For a causal sequence, poles are inside the unit circle (applies to z-transform functions that are ratios of two polynomials) OR
• Rule #2: Unit circle is in the region of convergence. (In continuous-time, imaginary axis would be in region of convergence of Laplace transform.)
• Example:
Stable if |a| < 1 by rule #1 or equivalently
Stable if |a| < 1 by rule #2 because |z|>|a| and |a|<1
Review
6 - 16
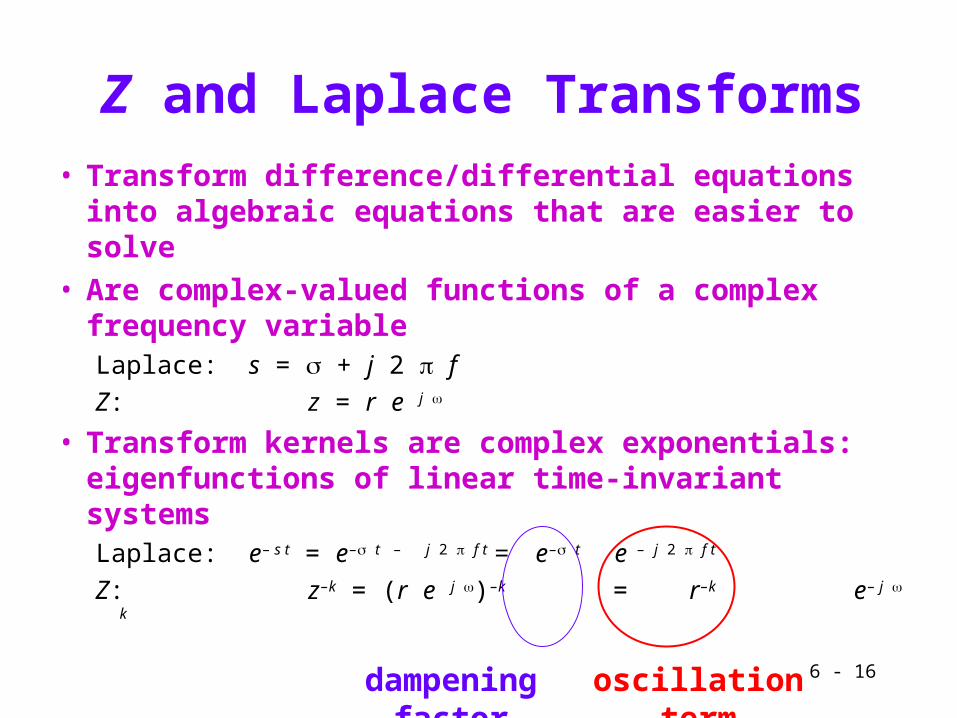
Z and Laplace Transforms
• Transform difference/differential equations into algebraic equations that are easier to solve
• Are complex-valued functions of a complex frequency variableLaplace: s = + j 2 f
Z: z = r e j
• Transform kernels are complex exponentials: eigenfunctions of linear time-invariant systemsLaplace: e– s t = e– t – j 2 f t = e– t e – j 2 f t
Z: z–k = (r e j )–k = r–k e– j k
dampening factor oscillation term
6 - 17
Z and Laplace Transforms
• No unique mapping from Z to Laplace domain or from Laplace to Z domain– Mapping one complex domain to another is not unique
• One possible mapping is impulse invariance – Make impulse response of a discrete-time linear time-
invariant (LTI) system be a sampled version of the continuous-time LTI system.
H(z) y[k]f[k]
Z
H(s) tf~ ty~
Laplace
TsezzHsH |)()(
6 - 18
Impulse Invariance Mapping
• Impulse invariance mapping is z = e s T
Laplace Domain Z Domain
Left-hand plane Inside unit circle
Imaginary axis Unit circle
Right-hand plane Outside unit circle
1
Im{z}
Re{z}
s = -1 j z = 0.198 j 0.31 (T = 1 s)
s = 1 j z = 1.469 j 2.287 (T = 1 s)
1
2
11 maxmax sffω
1
1
-1
-1
Im{s}
Re{s}
fjs 2 lowpass, highpass
bandpass, bandstop allpass, or notch?
6 - 19
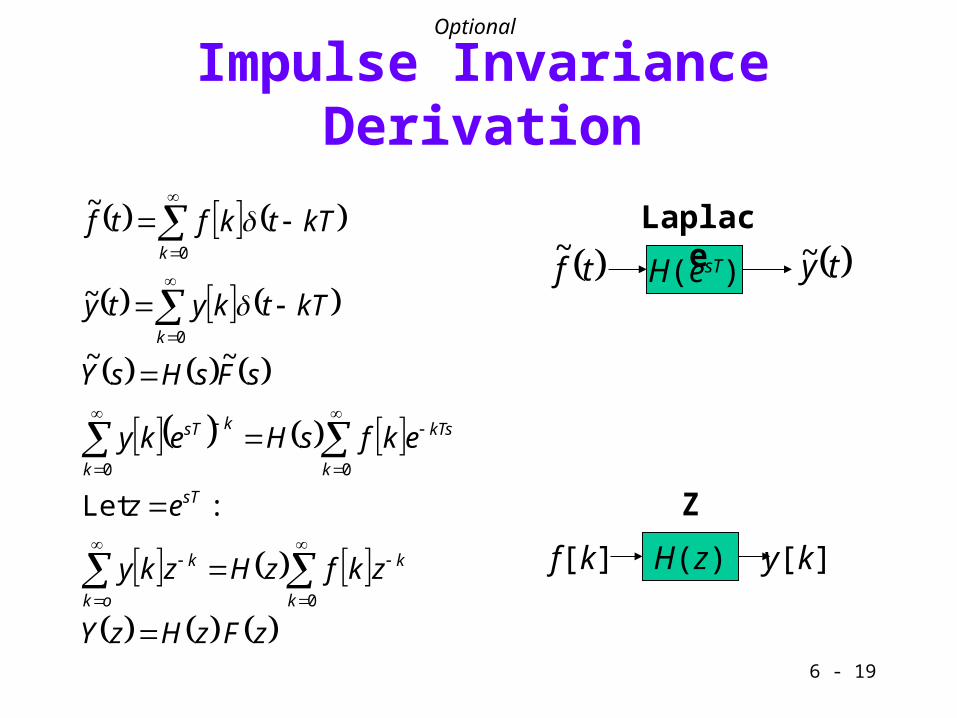
Impulse Invariance Derivation
zFzHzY
zkfzHzky
ez
ekfsHeky
sFsHsY
kTtkyty
kTtkftf
k
k
ok
k
sT
k
kTs
k
ksT
k
k
:Let
~~
~
~
0
00
0
0
H(z) y[k]f[k]
Z
H(esT) tf~ ty~
Laplace
Optional
6 - 20
Analog IIR Biquad
• Second-order filter section with 2 poles and 2 zeros– Transfer function is a ratio of two real-valued polynomials
– Poles and zeros occur in conjugate symmetric pairs
• Quality factor: technology independent measure of sensitivity of pole locations to perturbations– For an analog biquad with poles at a ± j b, where a < 0,
– Real poles: b = 0 so Q = ½ (exponential decay response)
– Imaginary poles: a = 0 so Q = (oscillatory response)
Qa
baQ
2
1 where
2
22
6 - 21
Analog IIR Biquad
• Impulse response with biquad with poles a ± j b with a < 0 but no zeroes:– Pure sinusoid when a = 0 and pure decay when b = 0
• Breadboard implementation– Consider a single pole at –1/(R C). With 1% tolerance on
breadboard R and C values, tolerance of pole location is 2%– How many decimal digits correspond to 2% tolerance?– How many bits correspond to 2% tolerance?– Maximum quality factor is about 25 for implementation of
analog filters using breadboard resistors and capacitors.– Switched capacitor filters: Qmax 40 (tolerance 0.2%)– Integrated circuit implementations can achieve Qmax 80
) cos( )( tbeCth ta
6 - 22
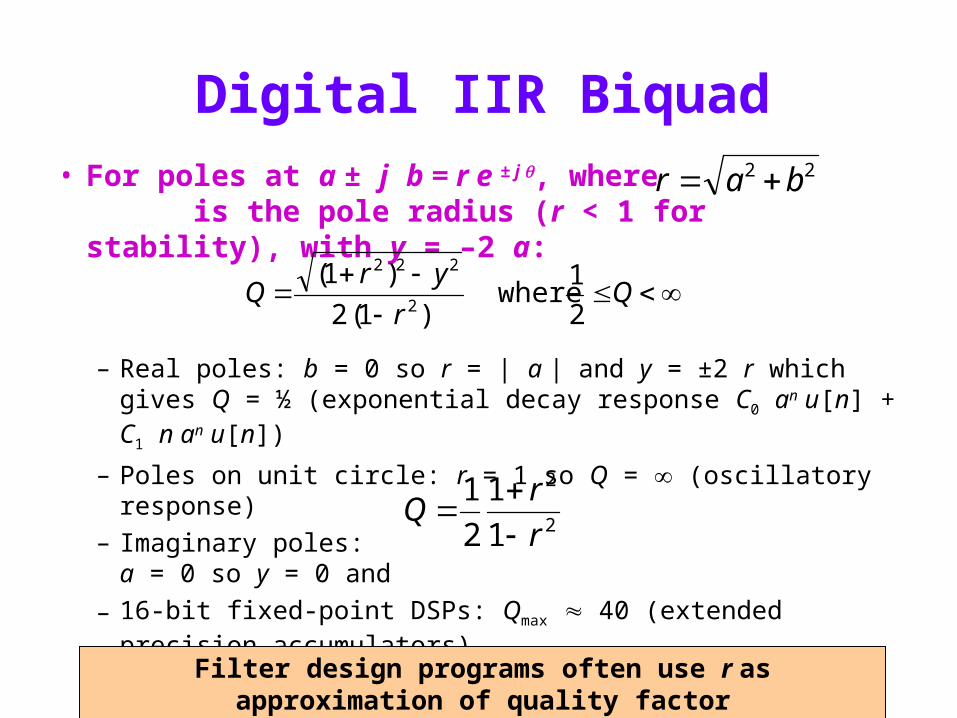
Digital IIR Biquad
• For poles at a ± j b = r e ± j , where is the pole radius (r < 1 for stability), with y = –2 a:
– Real poles: b = 0 so r = | a | and y = ±2 r which gives Q = ½ (exponential decay response C0 an u[n] + C1 n an u[n])
– Poles on unit circle: r = 1 so Q = (oscillatory response)
Filter design programs often use r as approximation of quality factor
6 - 23
Analog/Digital IIR Implementation
• Classical IIR filter designsFilter of order n will have n/2 conjugate roots if n is even or
one real root and (n-1)/2 conjugate roots if n is odd
Response is very sensitive to perturbations in pole locations
• Robust way to implement an IIR filterDecompose IIR filter into second-order sections (biquads)
Cascade biquads in order of ascending quality factors
For each pair of conjugate symmetric poles in a biquad, conjugate zeroes should be chosen as those closest in Euclidean distance to the conjugate poles
6 - 24
Classical IIR Filter Design
• Classical IIR filter designs differ in the shape of their magnitude responses Butterworth: monotonically decreases in passband and
stopband (no ripple) Chebyshev type I: monotonically decreases in passband but
has ripples in the stopband Chebyshev type II: has ripples in passband but monotonically
decreases in the stopband Elliptic: has ripples in passband and stopband
• Classical IIR filters have poles and zeros, except that analog lowpass Butterworth filters are all-pole
• Classical filters have biquads with high Q factors
6 - 25
Analog IIR Filter Optimization
• Start with an existing (e.g. classical) filter design• IIR filter optimization packages from UT Austin
(in Matlab) simultaneously optimizeMagnitude response
Linear phase in the passband
Peak overshoot in the step response
Quality factors
• Web-based graphical user interface (developed as a senior design project) available at
http://signal.ece.utexas.edu/~bernitz
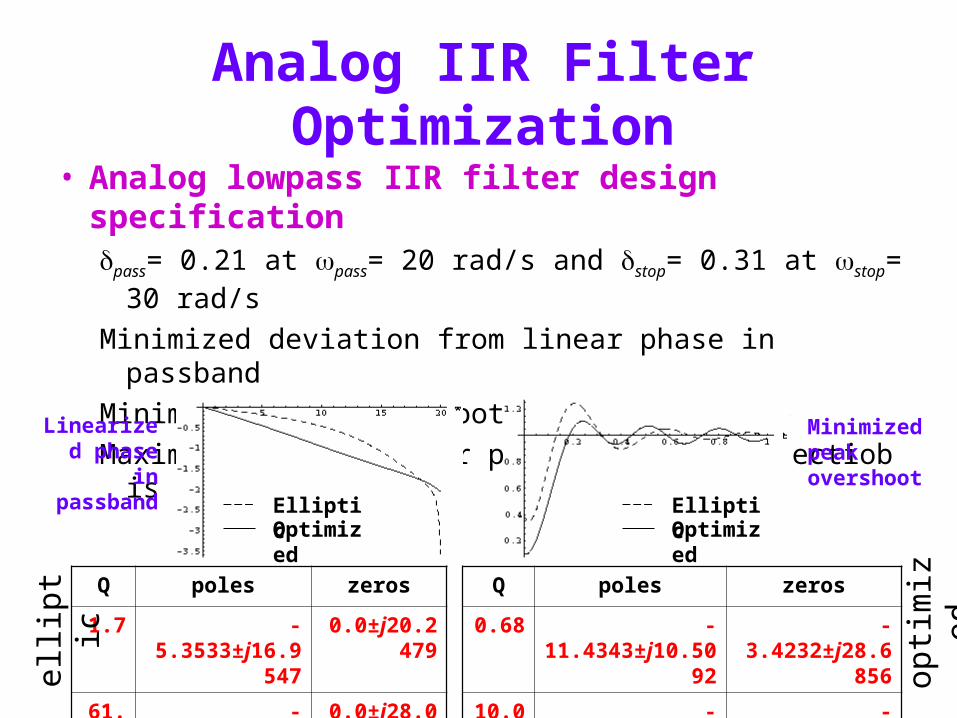
Analog IIR Filter Optimization
• Analog lowpass IIR filter design specificationpass= 0.21 at pass= 20 rad/s and stop= 0.31 at stop= 30 rad/s
Minimized deviation from linear phase in passband
Minimized peak overshoot in step response
Maximum quality factor per second-order sectiob is 10