1 Agents and Intelligent Agents • An agent is anything that can be viewed as – perceiving its environment through sensors and – acting upon that environment through actuators. • An intelligent agent acts further for its own interests.
Transcript
1
Agents and Intelligent Agents
• An agent is anything that can be viewed as – perceiving its environment through sensors and – acting upon that environment through actuators.
• An intelligent agent acts further for its own interests.
• Robotic agent: – Sensors: cameras and infrared range finders – Actuators: various motors
• Agents include humans, robots, etc.• Perceptions: – Vision, speech reorganization, etc.
3
Perception
• The see function is the agent’s ability to observe its environment, whereas the action function represents the agent’s decision making process
• Output of the see function is a percept:see : E Per
which maps environment states to percepts, and action is now a function
action : Per* Awhich maps sequences of percepts to actions
4
Agents and environments
• The agent function maps from percept histories (sequences of percepts) to actions:
[f: P* A]
5
Properties of agent:• mobility: the ability of an agent to move
around in an environment.• veracity: an agent will not knowingly
communicate false information• benevolence: agents do not have conflicting
goals, and that every agent will therefore always try to do what is asked of it
• rationality: agent will act in order to achieve its goals, and will not act in such a way as to prevent its goals being achieved.
• learning/adoption: agents improve performance over time
6
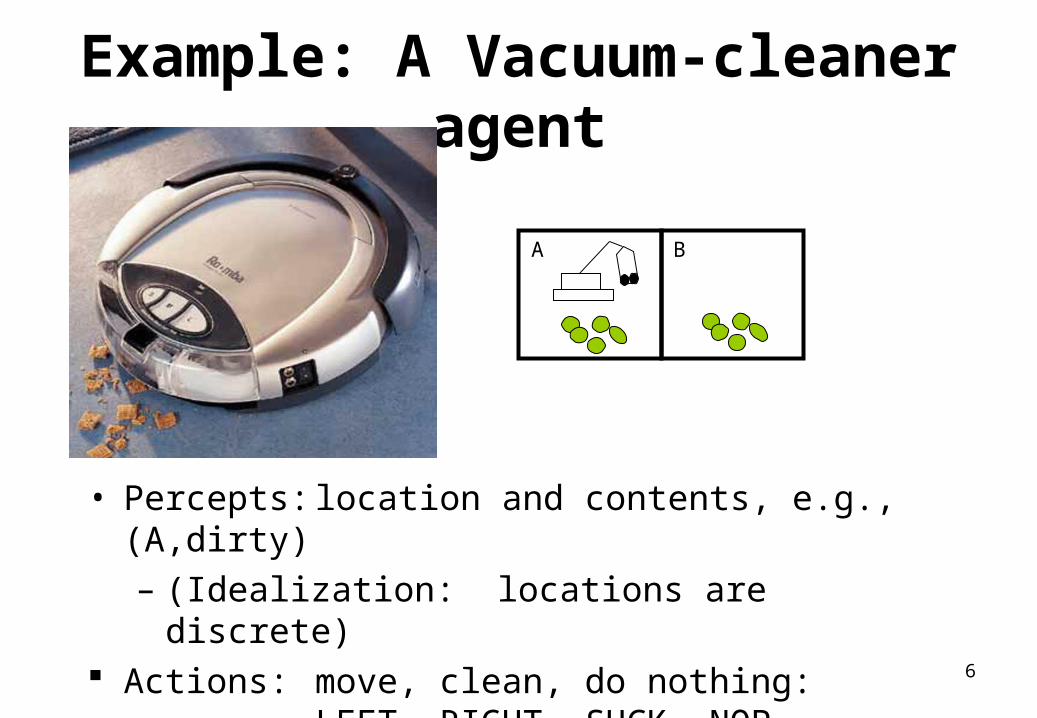
Example: A Vacuum-cleaner agent
A B
• Percepts: location and contents, e.g., (A,dirty)– (Idealization: locations are discrete)
Actions: move, clean, do nothing: LEFT, RIGHT, SUCK, NOP
7
Vacuum-cleaner world: agent function
8
Agents and Objects• Main differences:
– agents are autonomous:agents embody stronger notion of autonomy than objects, and in particular, they decide for themselves whether or not to perform an action on request from another agent
– agents are smart:capable of flexible (reactive, pro-active, social) behavior, and the standard object model has nothing to say about such types of behavior
– agents are active:a multi-agent system is inherently multi-threaded, in that each agent is assumed to have at least one thread of active control
9
Rationality
• What is rational at any given time depends on four things:
The performance measure that defines the criterion of success.
The agent’s prior knowledge of the environment.
The actions the agent can perform.The agent’s percept sequence to date.
10
Task environment
• To design a rational agent we need to specify a task environment – a problem specification for which the agent is a
solution
• PEAS: to specify a task environment– Performance measure– Environment– Actuators– Sensors
tests, diagnoses, treatments, referrals)• Sensors: Keyboard (entry of symptoms,
findings, patient's answers)
13
Environment types:
• Fully observable :(vs. partially observable): An agent's sensors give it access to the complete state of the environment at each point in time.
• Deterministic (vs. stochastic): The next state of the environment is completely determined by the current state and the action executed by the agent. – If the environment is deterministic except for the
actions of other agents, then the environment is strategic
14
Environment types Cont…
• Single agent (vs. multi-agent): An agent operating by itself in an environment.
– An agent solving crossword puzzle by itself is in a single-agent environment, whereas an agent playing chess is in a two-agent environment.
– A multi-agent environment can either be competitive or co-operative.
15
Environment types: Static vs. Dynamic
• A static environment is one that can be assumed to remain unchanged except by the performance of actions by the agent
• A dynamic environment is one that has other processes operating on it, and which hence changes in ways beyond the agent’s control. – The physical world is a highly dynamic
environment.
16
Environment types – Discrete vs. continuous
• An environment is discrete if there are a finite number of distinct states in the environment and a discrete set of percepts and actions. – The game of chess is an example of a
discrete environment, automated taxi driver is a continuous-state and continuous-time problem.
• Discrete environments could in principle be handled by a kind of “lookup table”
17
Agent types• Six basic agent types in order of increasing
generality:– Simple reflex– Model-based reflex– Goal-based– Utility-based– Learning Agents– Knowledge based• Choosing Appropriate agents– possible percepts and actions– what goals or performance measure the agent is
supposed to achieve– what sort of environment it will operate in
18
Simple reflex agent• Only use current percept to select an action• Works only in fully observable environments
• function SIMPLE-REFLEX-AGENT(percept) returns action
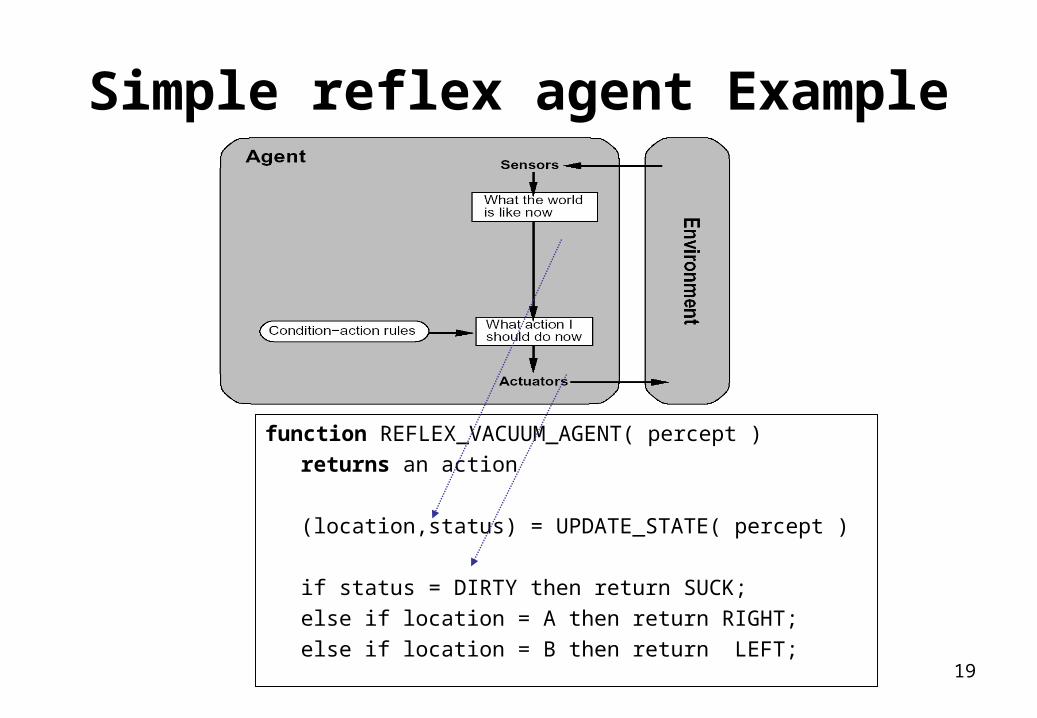
function REFLEX_VACUUM_AGENT( percept )returns an action
(location,status) = UPDATE_STATE( percept )
if status = DIRTY then return SUCK;else if location = A then return RIGHT;else if location = B then return LEFT;
20
• Disadvantages• Applicable where limited intelligence is required• A little bit of unobservability can cause serious
trouble
Simple reflex agent
• Example –Vacuum Cleaner• If there is no location sensor
21
Model-based reflex agents• Deal with partially observable environment
• an internal state maintains important information from previous percepts
• sensors only provide a partial picture of the environment
• The internal states reflects the agent’s knowledge about the world this knowledge is called a model.
22
Model-based reflex agents• function REFLEX-AGENT-WITH-STATE (percept) returns
action• static: state, a description of the current world state• rules, a set of condition-action rules
• state UPDATE-STATE (state, percept)• rule RULE-MATCH (state, rules)• action RULE-ACTION [rule]• state UPDATE-STATE (state, action)• return action
TO Update internal state information , agent must knowHow the world evolves independently of the agentHow the agents own actions affect the world
23
Model-based reflex agents• New
24
What is the Difference? Example - Taxi Driver changing position
• Model-based– percept -no car – internal state -to keep
track where the other cars are
– update state-• overtaking car will
be closer behind• whether he should
turns the steering wheel clockwise or anti...
• Simple Reflex– percept -no car– action - just change
his position
25
• Advantages– Sensors do not provide access to the
complete state of the world– Internal state helps agent to
distinguish between world states• Disadvantages
– More complex than simple reflex agent– Computation time increases
Model-based reflex agents
26
Goal-based agents
• Use current state and goal state to decide correct
actions.
• Agents consider future influence when making current decision.
• More flexible for searching and planning.
27
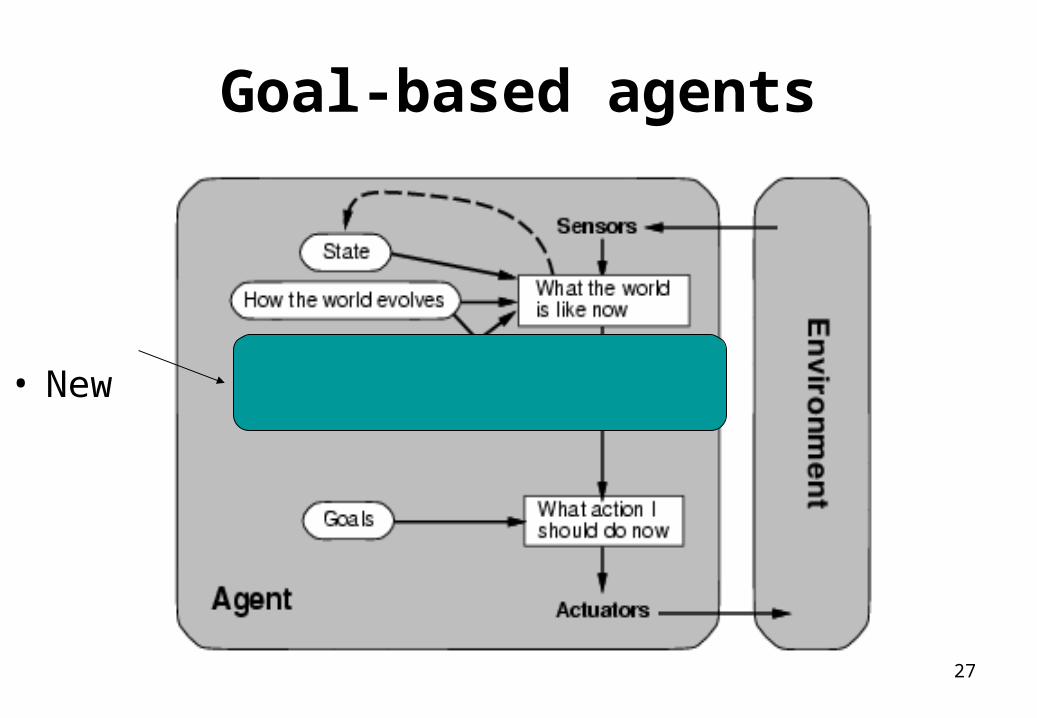
Goal-based agents
• New
28
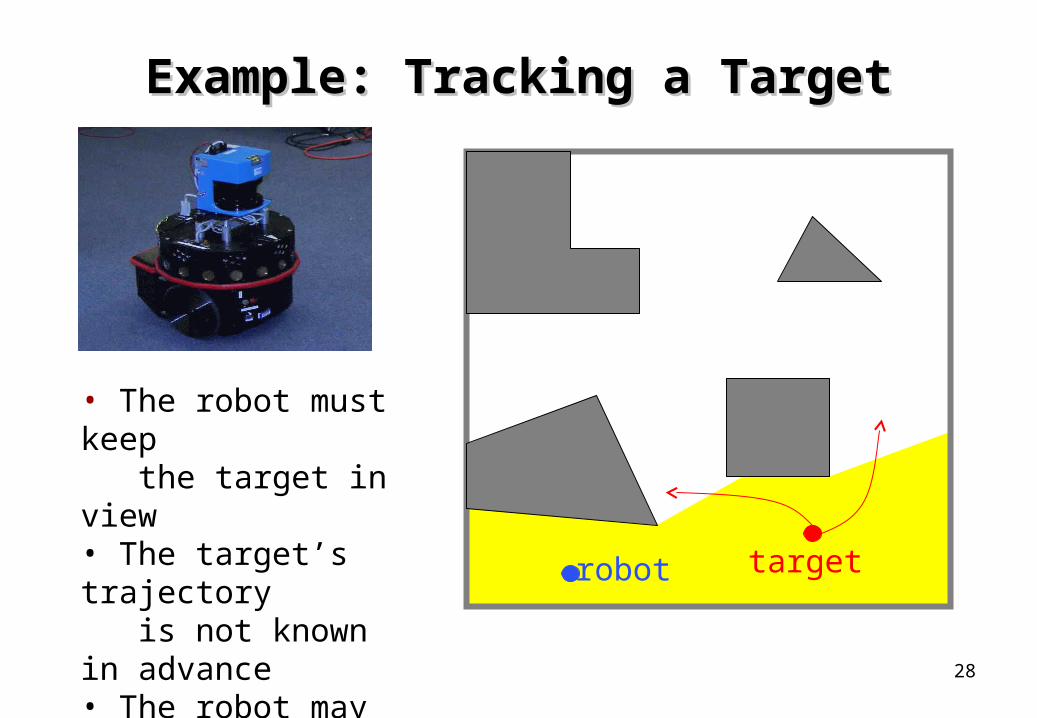
Example: Tracking a TargetExample: Tracking a Target
targetrobot
• The robot must keep the target in view• The target’s trajectory is not known in advance• The robot may not know all the obstacles in advance• Fast decision is required
29
Goal-based agentsDisadvantage:
The goal based agent appears less efficient because the agent have to consider long sequences of possible actions before deciding if goal is achieved.
It requires searching and planning because it involves considerations of the future, “what will happen if I do.?”
Advantage:it is more flexible because the knowledge that
supports its decision is represented explicitly and can be modified.
30
Goals alone are not really enough to generate high quality behavior in most environment. Goals can be achieved in multiple ways. A goal specifies a crude destination between a happy and unhappy state, but often need a more general performance measure that describes “degree of happiness”
Utility-based agents specifies How well can the goal be achieved (degree of happiness). Utility function U: State Real indicating a measure of success or happiness when at a given stateWhich goal should be selected if several can be achieved?What to do if there are conflicting goals?
– Speed and safety
Utility-based agents:
31
Utility-based agents:
• New
32
A complete specification of the utility function allows rational decisions in two kinds of cases:First : when there are conflicting goals, only some
of which can be achieved (for ex: speed and safety), the utility function specifies the appropriate tradeoff.
Second: when there are several goals that the agent can aim for, none of which can be achieved with certainty, utility provides way in which the likelihood of success can be weighted up against the importance of the goals.
Utility-based agents:
33
Advantage:Utility based agents can handle the uncertainty
inherent in partially observable environments.Consider the taxi driver example:There are many action sequences that will get the
taxi to its destination but some are quicker ,safer, more reliable or cheaper than others.
Goals just provides a distinction between whether the passenger is ‘happy’ or ‘unhappy’. The utility function defines the degree of happiness.
Utility-based agents:
34
The idea behind learning is that percepts should be used not only for acting, but also for improving the agent’s ability to act in the future.
Learning takes place as a result of the interaction between the agent and the world, and from observation by the agent of its own decision-making processes.
Learning agents:
35
A Learning Agent can be divided into four conceptual components:
Leaning Element, Performance Element, Critic, and Problem Generator.
Learning agents:
36
The Knowledge based approach is a particularly powerful way of constructing an agent program.It aims to implement a view of agents in which they can be seen as knowing about their world, and reasoning about their possible courses of actions.Knowledge Based Agents are able to accept the new tasks in the form of explicitly described goals; they can achieve competence quickly by being told or learning new knowledge about the environment; and they can adapt to changes in the environment by updating the relevant knowledge.
Knowledge Based Agents
37
A Knowledge based agent needs to know many things ---- The current state of the world,How to infer unseen properties of the world from
percepts,How the world evolves over time,What it wants to achieve, andWhat its own actions do in various circumstances.
The central component of a Knowledge based agent is its Knowledge Base, or KB.
Knowledge Based Agents
38
A Knowledge Based agent can be described at three levelsKnowledge LevelThe most abstract level; we can describe the agent by
saying what it knows. Example: A taxi agent might know that, To reach Malibag
from Mogbazar he needs to go through Mouchak. Logical LevelThe level at which the knowledge is encoded into