Intelligent machines, the “idiots savants” A High Dessert presentation at University College By Felisa J Vázquez-Abad Dept of Computer Science and Operations Research University of Montréal Dept of Electrical and Electronic Engineering
Transcript
Intelligent machines, the “idiots savants”
A High Dessert presentation at University College
By Felisa J Vázquez-Abad
Dept of Computer Science and Operations Research
University of MontréalDept of Electrical and Electronic Engineering
University of Melbourne
Monday, May 21 2001
Felisa Vázquez-Abad, High Dessert at University College.
Intelligence and adaptation• Intelligent creatures have control
over the environment• Adapt the surroundings vs
adapting to the conditions of the environment
• What are the elements of control?Understanding Prediction of outcomesCapacity of adaptation
Monday, May 21 2001
Felisa Vázquez-Abad, High Dessert at University College.
Control Theory: the beginning
Description: Physics in the XVIII Century Galileo Galilei: 1564-1642, invents
methodological approach. Sir Isaac Newton: 1643 -1727,
seeks a unifying theory of Physics.
Newton’s Second Law: F = ma … F(t) = s p(s) ds, p(t) = m v(t). Momentum,All objects (including light) travel using the minimum
energy path: J = s L(m, x(t)) dt, control v(t) = x’(t)
“God controls the motion through the velocities”
Monday, May 21 2001
Felisa Vázquez-Abad, High Dessert at University College.
Science and Engineering: from theory to
practiceXVIII and XIX Centuries
Understanding: mathematical models (Newton + Leibniz) and theoretical physics,
• Mechanics• Thermodynamics• Electricity and MagnetismEngineering: inventions, creation of engines• Mechanical objects• Locomotives
Monday, May 21 2001
Felisa Vázquez-Abad, High Dessert at University College.
Science and Engineering: from theory to
practiceXVIII and XIX Centuries
Understanding: mathematical models (Newton + Leibniz) and theoretical physics,
• Mechanics• Thermodynamics• Electricity and MagnetismEngineering: inventions, creation of engines• Mechanical objects• Locomotives
Monday, May 21 2001
Felisa Vázquez-Abad, High Dessert at University College.
Engineering: the 20-th CenturyGood models: electricity,
magnetism, electronics, quantum physics…
• Household appliances
Monday, May 21 2001
Felisa Vázquez-Abad, High Dessert at University College.
Engineering: the 20-th CenturyGood models: electricity,
magnetism, electronics, quantum physics…
• Household appliances
• Telecommunications
• Computers
Monday, May 21 2001
Felisa Vázquez-Abad, High Dessert at University College.
Engineering: the 20-th CenturyGood models: electricity,
magnetism, electronics, quantum physics…
• Household appliances
• Telecommunications
• Computers
New life style, we create machines and adapt our surroundings…
Monday, May 21 2001
Felisa Vázquez-Abad, High Dessert at University College.
Beyond control: intelligence50’s science fiction: the image of the future
Not quite…
Monday, May 21 2001
Felisa Vázquez-Abad, High Dessert at University College.
Beyond control: intelligence50’s science fiction: the image of the future
Not quite… but
Monday, May 21 2001
Felisa Vázquez-Abad, High Dessert at University College.
Beyond control: intelligence50’s science fiction: the image of the future
Felisa Vázquez-Abad, High Dessert at University College.
Beyond control: intelligence50’s science fiction: the image of the future
Not quite… but
Automatic pilots,Robots for mining,Space travel...
Monday, May 21 2001
Felisa Vázquez-Abad, High Dessert at University College.
Control and OptimisationOptimisation: mathematical problem• Objective function (cost)• Control variable u
min J(u), u 2 UThreshold controls:• Maintenance• Telecommunications (e-commerce)• Stabilising mechanisms• Energy supplies
Monday, May 21 2001
Felisa Vázquez-Abad, High Dessert at University College.
Optimisation, examplesMaintenance Strategy
Several components of a system, subject to failures.
Failed component: very expensive, replace or fix.
Preventive replacements: when age is over L.Cost: if L is too small we are paying too
dearly and discarding working components, if L is too big we are risking failures and
this may be fatal.… how to choose optimal L ?
Monday, May 21 2001
Felisa Vázquez-Abad, High Dessert at University College.
Optimisation, examplesMaintenance Strategy
Several components of a system, subject to failures.Failed component: very expensive, replace or fix.Preventive replacements: when age is over L.
We invented a new method using advanced simulation techniques: the computer recreates a series of scenarios in parallel “imaginary worlds” to choose the best value of L.
(2000 Jacob Wolfowitz Prize for Theoretical Advances in
the Mathematical and Management Sciences)
Monday, May 21 2001
Felisa Vázquez-Abad, High Dessert at University College.
Optimisation, complex systems • Multiple objectives (minimal cost
and better service)• Complex interactions (several
components in system: networks)• Uncertainty in external conditions• Control agents should be as
independent as possible (decentralised, asynchronous control)
Monday, May 21 2001
Felisa Vázquez-Abad, High Dessert at University College.
Complex systems: example
Transportation: Subway networkCost: trade-off between operational cost
and social cost (wait of passengers)Control: Frequency of trains on each line.
Per line: if frequency is too high wait is small but cost is high, and viceversa: seek for optimum.
Monday, May 21 2001
Felisa Vázquez-Abad, High Dessert at University College.
Complex systems: example
Transportation: Subway networkInteraction between lines? Benefit of one may
yield penalties for others: transfer passengers.
Monday, May 21 2001
Felisa Vázquez-Abad, High Dessert at University College.
Complex systems: example
Transportation: Subway networkInteraction between lines? Benefit of one may
yield penalties for others: transfer passengers.
Greedy algorithms do not yield global optimality:
Individual benefit is notThe benefit of all
Monday, May 21 2001
Felisa Vázquez-Abad, High Dessert at University College.
Complex systems: exampleSeek optimum: slowly change the
controls in the direction of improvement of the cost to seek optimality.
Gradient-search methods: J(u)
u
Slope=gradient
Method: u(n+1) = u(n) - r J(u)
Monday, May 21 2001
Felisa Vázquez-Abad, High Dessert at University College.
optimisation, find optimal control.• Changes in external or internal
conditions: – operating components become old, – users of system change patterns
• Dynamic control: prediction and anticipation to changes, adaptation.
Monday, May 21 2001
Felisa Vázquez-Abad, High Dessert at University College.
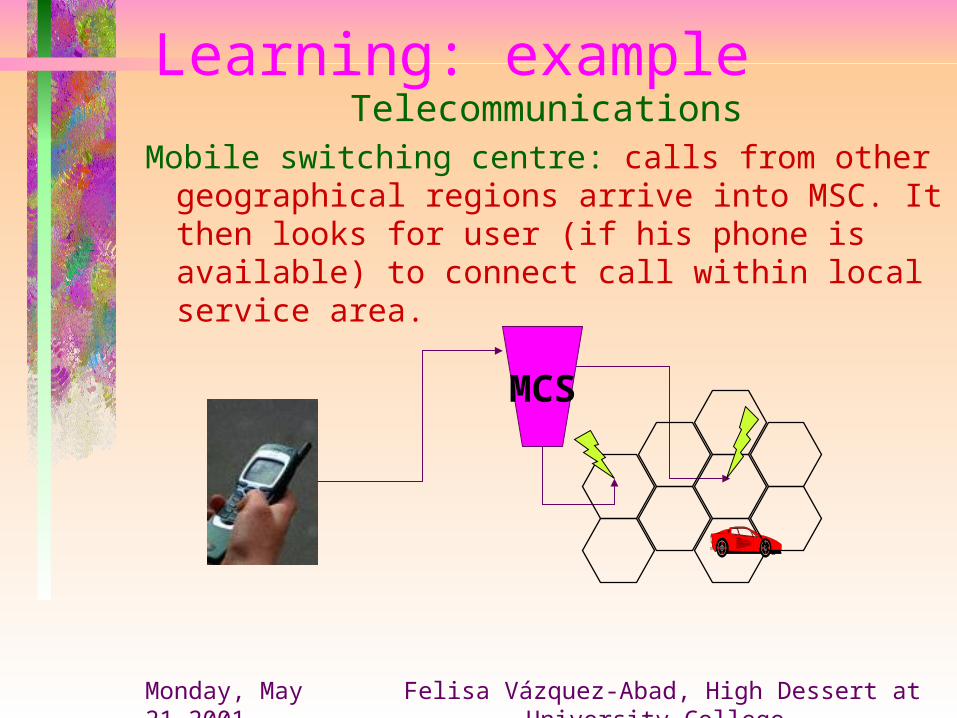
Learning: exampleTelecommunications
Mobile switching centre: calls from other geographical regions arrive into MSC. It then looks for user (if his phone is available) to connect call within local service area.
MCS
Monday, May 21 2001
Felisa Vázquez-Abad, High Dessert at University College.
Learning: exampleTelecommunications
Interference: to search the user, signals are sent from MSC to the power station at target cell. This signal may cause interference with on-going calls which are connected.
Search strategy: exhaustive always finds client but degrades performance, – one trial only? Which one? – Can we learn patterns of behaviour?
Monday, May 21 2001
Felisa Vázquez-Abad, High Dessert at University College.
Learning: exampleTelecommunications
System under uncertainty
Control u
Measurements: J(u) and the sensitivity
rJ(u)
u(n+1) = u(n) - r J(u)
Monday, May 21 2001
Felisa Vázquez-Abad, High Dessert at University College.
Beyond Control: Intelligence
Elements of learning:
• Measure performance (define model)
• Understand impact of our actions (sensibility)
• Capacity to react to those measurements (the updating algorithms)
Monday, May 21 2001
Felisa Vázquez-Abad, High Dessert at University College.
Beyond Control: Intelligence
My View of Control in XXI Century• Global information not physically localised,• Improvement mechanisms result from
collective coherent behaviour of simple components,
• Each component acts independently and locally,
Capacity for learning and adaptation: sum of individual “simple-minded” efforts.
The “idiots savants” are the simple control agents distributed across a complex system.