32
Interconnect Delay Models

Interconnect Delay Models
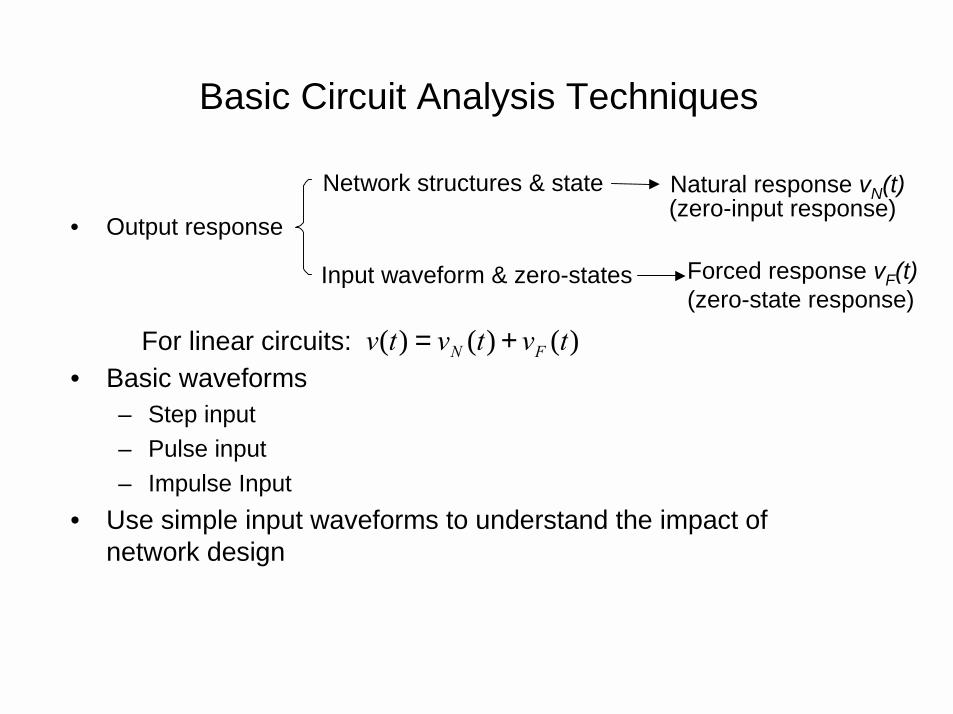
Basic Circuit Analysis Techniques
• Output response
• Basic waveforms– Step input– Pulse input– Impulse Input
• Use simple input waveforms to understand the impact of network design
Network structures & state
Input waveform & zero-states
Natural response vN(t)(zero-input response)
Forced response vF(t)(zero-state response)
For linear circuits: )()()( tvtvtv FN +=

unit step function
u(t)=0
1
0<t
0≥t
1
pulse function of width T
0
1/T
-T/2 T/2
−−+= )
2()
2(1)( TtuTtu
TtPT
unit impulse function
∫− =
>=≠=
→
ζ
ζδ
ζ
δδ
1)(
0any for s.t.0for singular 0for 0)(
0when )( : )(
dtt
ttt
TtPt T
dttduδ(t)
dxxtut
)(or
)()(
definitionBy
=
= ∫ ∞−δ
Basic Input Waveforms

• Definitions:– (unit) step input u(t) (unit) step response g(t)– (unit) impulse input δ(t) (unit) impulse response h(t)
• Relationship
• Elmore delay
∫∫ =→=
=→=
∞−
ttdxxhtgdxxtu
dttdgth
dttdut
0)()()()(
)()()()(
δ
δ
Step Response vs. Impulse Response
(Input Waveform) (Output Waveform)
∫ ∫∞ ∞
⋅=⋅=0 0
)()(' dttthdtttgTD

Analysis of Simple RC Circuit
)()()(
)())(()(
)()()(
tvtvdt
tdvRC
dttdvC
dttCvdti
tvtvtiR
T
T
=+⇒
==
=+⋅
first-order linear differentialequation with
constant coefficients
state variable
Inputwaveform
±v(t)C
RvT(t)
i(t)
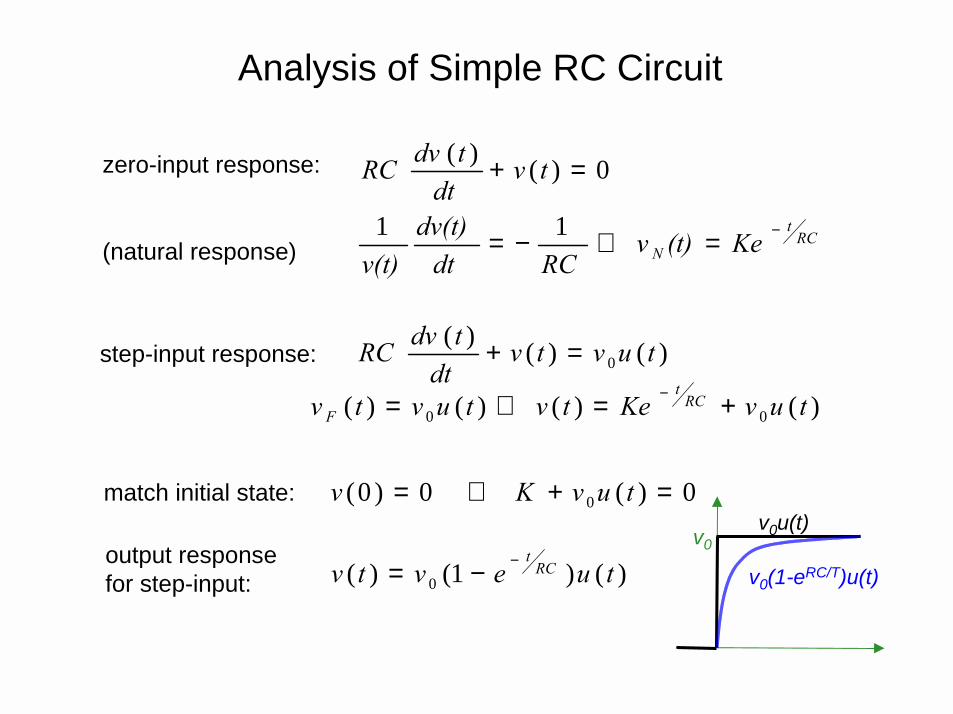
Analysis of Simple RC Circuit
0)()( =+ tvdt
tdvRCzero-input response:
(natural response)
step-input response:
match initial state:
output responsefor step-input:
v0v0u(t)
v0(1-eRC/T)u(t)
RCt
N Ke(t)vRCdt
dv(t)v(t)
−=⇒−= 11
)()()(0 tuvtv
dttdvRC =+
)()()()( 00 tuvKetvtuvtv RCt
F +=⇒= −
)()1()( 0 tuevtv RCt−−=
0)( 0)0( 0 =+⇒= tuvKv

Delays of Simple RC Circuit
• v(t) = v0(1 - e-t/RC) under step input v0u(t)
• v(t)=0.9v0 ⇒ t = 2.3RCv(t)=0.5v0 ⇒ t = 0.7RC
• Commonly used metricTD = RC (Elmore delay to be defined later)

Lumped Capacitance Delay Model• R = driver resistance• C = total interconnect capacitance + loading capacitance• Sink Delay: td = R·C
• 50% delay under step input = 0.7RC• Valid when driver resistance >> interconnect resistance• All sinks have equal delay
driver
3N
2N
+N
Rd
Cload

( )( )g0d
gintdloaddD
CLCRCCRCRt
+⋅⋅=
+⋅=⋅=
driver
3N
2N
+N
Lumped RC Delay Model
• Minimize delay ⇔ minimize wire length
Rd
Cload

Delay of Distributed RC Lines
......!4!2
1
2)cosh(
cosh1)(
42
+++=
+=
=
−
xx
eex
sRCssV
xx
out
Vout(t) Vout(s)LaplaceTransform
RVIN VOUT
CVOUTVIN
R
C
0.5
1.0
VOUT
DISTRIBUTED
LUMPED
1.0RC 2.0RC time
Step response of distributed and lumped RC networks.A potential step is applied at VIN, and the resulting VOUTis plotted. The time delays between commonly usedreference points in the output potential is also tabulated.

Delay of Distributed RC Lines (cont’d)
Output potential range Time elapsed(Distributed RC
Network)
Time elapsed(Lumped RC
Network)0 to 90% 1.0 RC 2.3 RC
10% to 90% (rise time) 0.9 RC 2.2 RC
0 to 63% 0.5 RC 1.0 RC
0 to 50% (delay) 0.4 RC 0.7 RC
0 to 10% 0.1 RC 0.1 RC

Distributed Interconnect Models
• Distributed RC circuit model– L,T or Π circuits
• Distributed RCL circuit model
• Tree of transmission lines

Distributed RC Circuit Models

0Z
0Z
Distributed RLC Circuit Model

Delays of Complex Circuits under Unit Step Input
• Circuits with monotonic response
• Easy to define delay & rise/fall time• Commonly used definitions
– Delay T50% = time to reach half-value, v(T50%) = 0.5Vdd
– Rise/fall time TR = 1/v’(T50%) where v’(t): rate of change of v(t)w.r.t. t
– Or rise time = time from 10% to 90% of final value• Problem: lack of general analytical formula for T50% &
TR!
t
10.5
v(t)T50%
TR

t
Delays of Complex Circuits under Unit Step Input (cont’d)
• Circuits with non-monotonic response
• Much more difficult to define delay & rise/fall time

)( of change of rate : )('(monotone) responseoutput : )(
tvtvtv
0.5
1
T50%
v(t)
t
t
v�(t)
medianof v�(t)(T50%) v'(t)
dtttvTD
ofmean
)('0∫∞
=
Elmore Delay for Monotonic Responses
• Assumptions:– Unit step input – Monotone output response
• Basic idea: use of mean of v’(t) to approximate median of v’(t)

• T50%: median of v’(t), since
• Elmore delay TD = mean of v’(t)
def.)(by )( of valuefinal of half
)(')('%50
%500
tv
dttvdttvT
T
=
=∫ ∫+∞
∫∞
=0
)(' tdttvT D
Elmore Delay for Monotonic Responses
Why Elmore Delay?
• Elmore delay is easier to compute analytically in most cases– Elmore’s insight [Elmore, J. App. Phy 1948]– Verified later on by many other researchers, e.g.
• Elmore delay for RC trees [Penfield-Rubinstein, DAC’81]• Elmore delay for RC networks with ramp input [Chan, T-
CAS’86]• .....
• For RC trees: [Krauter-Tatuianu-Willis-Pileggi, DAC’95]T50% ≤ TD
• Note: Elmore delay is not 50% value delay in general!

Elmore Delay for RC Trees
• Definition– h(t) = impulse response– TD = mean of h(t)
=
• Interpretation– H(t) = output response (step process)– h(t) = rate of change of H(t)– T50%= median of h(t)– Elmore delay approximates the median of h(t) by
the mean of h(t)
∫∞
⋅0
dtt h(t)
medianof v�(t)(T50%) v'(t)
dtttvTD
ofmean
)('0∫∞
=
h(t) = impulse response
H(t) = step response
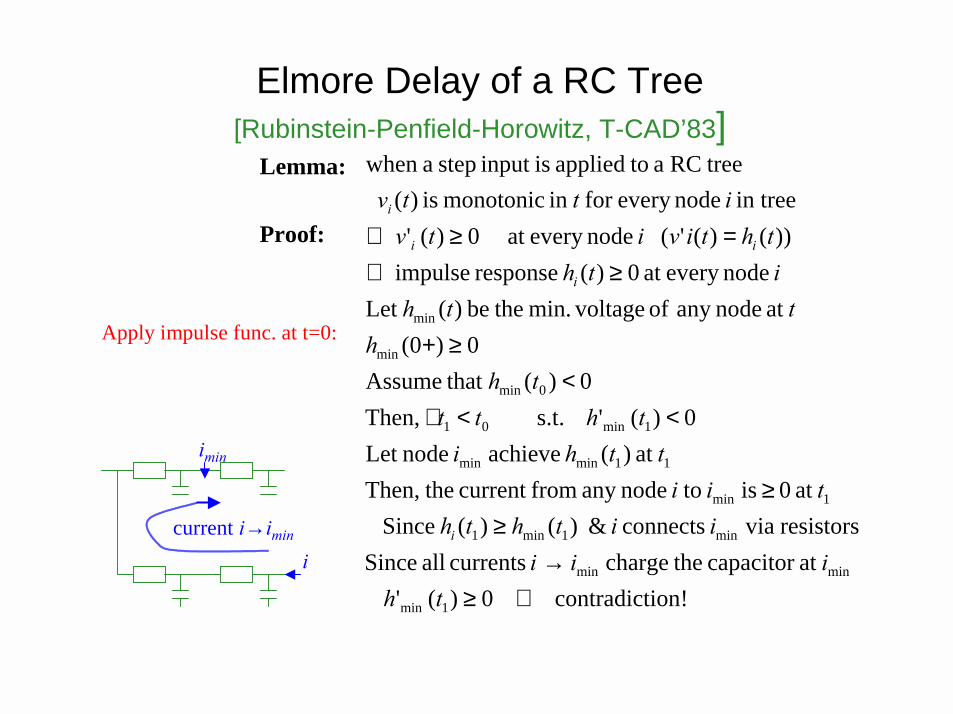
Elmore Delay of a RC Tree[Rubinstein-Penfield-Horowitz, T-CAD’83]
ion!contradict 0)(' at capacitor thecharge currents all Since
resistors via connects & )()( Since at 0 is to nodeany fromcurrent theThen,
at )( achieve nodeLet 0)(' s.t. Then,
0)( that Assume0)0(
at nodeany of voltagemin. thebe )(Let nodeevery at 0)( response impulse
))()('( nodeevery at 0)(' in tree nodeevery for in monotonic is )(
treeRC a toapplied isinput step awhen
1min
minmin
min1min1
1min
11minmin
1min01
0min
min
min
⇒≥→
≥≥
<<∃<
≥+
≥⇔=≥⇔
thiii
iiththtii
tthithtt
thh
tthith
thtivitvittv
i
i
ii
i
Lemma:
Proof:
Apply impulse func. at t=0:
imin
icurrent i→imin

Elmore Delay in a RC Tree (cont’d)
∫∫∫∫
∑∑
∑
∑
∑
∞
∞→∞→
∞∞∞
∈
−+⋅−=−⋅=
−⋅=⋅=
=⋅=
⋅=
⋅==−
=
=
∩
00
000
i
))(1()1)((lim])()([lim
)(|)()('
)()(
) and between res.path (common ) cap o(current t
)in scap' all current to(on drop voltageThe)(1
)( node of cap. current to The
node delay to Elmore
& input to from
pathcommon of resistance: at rooted subtree: ; node input to frompath :
dttvTTvdttvTTv
dttvttvdtttvT
dttdvCRR
dttdvC
PPk
SRPtvdt
tdvCi
CRTi
kjPPR
isiP
iiT
T
iiT
iiiD
k
kkkiki
k
kk
kki
Pkikii
i
kkkiD
kj
jk
ii
i
i
i
inputi
k
jSi
path resistance Rii
Rjk
Theorem :
Proof :

Elmore Delay in a RC Tree (cont’d)• We shall show later on that
i.e. 1-vi(T) goes to 0 at a much faster rate than 1/T when T→∞
• Let
0))(1(lim =⋅−∞→
TTviT
)(
)](1[))(1(lim
)(
)](1[
)(
)()(
)](1[)(
0
0
0
∑∫
∑∑ ∑∑∫ ∑
∫
=∞=
−+−=∴
=∞
−−=
=
=
−=
∞
∞→
kkkii
iiTD
kkkii
k kkkkikki
kkkki
t
k
kkkii
t
ii
CRf
dttvTTvT
CRf
tvCRCR
tvCR
dxdx
xdvCRtf
dxxvtf
i
(1)
vi(t)
1
0 t
area ∫ −=t
ii dxxvtf0
)](1[)(

) & (since Then,
)(
Recall Let
2
kiiikikkpDR
iik
kkiR
kkkiD
kkkkp
RRRRTTT
RCRT
CRTCRT
ii
i
i
≥≥≤≤
=
==
∑∑∑
Some Definitions For Signal Bound Computation

Signal Bounds in RC Trees• Theorem
ii
iRiRiRiD
i
i
i
ppRip
i
ii
i
RDT
tT
TT
p
R
i
p
D
RpT
tT
TT
p
D
RDRi
Di
TTteeTT
tv
tT
tT
TTteeTT
TTttTt
Ttv
t
−≥⋅−
≤
≥−
−
−≥⋅−
−≥≥+
−≥
≥
−−
−−
)(
)(
1
)(
0 1
bounds Upper
1
) when trivial-(non 0 1 )(
0 0 bounds Lower

Proofs of Signal Bounds in RC Trees• Lemma:
• Lemma:
monotonic) is )( (Since
0 )(
)(
)()()](1[)](1[
),min( ),max(
)](1[)](1[
tvdt
tdvCRRRR
dttdv
CRRdt
tdvCRR
tvRtvRRRRR
RRRRRR
tvRtvR
j
j
jjjikijkii
j j
jjjiki
jjjkii
ikikii
jikijkii
jikijkjikiii
ikikii
≥−=
−=
−−−
⋅≥⋅∴
≥≥
−≥−
∑
∑ ∑
Proof:(2)
)](1[)](1[ tvRtvR ikkkki −≤− (3)

Proofs of Signal Lower Bounds in RC Trees
ttvtfttttftftvtt
tv
etfTtfT
e
Tt(ttfTT
t(ttt
Tdttdf
tfTT
TtfT
dttdftv
TtfT
tvTtfTtvT
tvCRtfT
ii
iii
i
Ttt
iD
iDTtt
R
ttiD
p
R
i
iDp
R
iDii
p
iD
ipiDiR
kkkkiiD
iR
i
ip
ii
ii
i
ii
ii
i
⋅−≥==−≤−−
≥−−
≥
−≤−−≤−
≤⋅−
≤
−≤=−≤
−
−≤−≤−
−=−
−−−−
∑
)](1[)( ,0Let )()()](1)[(
monotonic is )( since Also,
)()(
i.e.
)|))(ln() : to from gIntegratin
1)()(
11 Thus,
)()()(1)(
i.e.
)](1[)()](1[ :(3) & (2) From
))(1()( :(1) From
43
34434
)(
1
2)(
121221
1212
2
1
fi(t4)-fi(t3)
(t4-t3)[1-vi(t4)]
t3 t4
(4)
(5)
(7)(6)

Proofs of Signal Lower Bounds in RC Trees
ppiRp
ipi
p
i
ii
p
ii
i
i
i
i
i
i
iii
Tt
TTT
p
DTt
p
Di
Tt
Dip
iDiR
Tt
DiD
iiiRp
Rp
R
Di
R
Di
iDiDiR
eeTT
eTT
tv
eTtvT
tfT(t)vT
eTtfT
ttt
tftftvTTttTTtt
TtT
tvTt
Ttv
ttvTtfTtvT
−−−−
−
−
⋅−=−≥∴
≤−
++
−≤−
≤−
==
−≤−−
=+−=
+−≥∴
+≤−⇒
−−≤−≤−
)(
3
321
3
43
11)(
)](1[
:)10()9()8(
)(]1[ (4) of half-left From
)(
(5) of half-leftin and 0Let
)()()](1)[(
(6)in Let
1)( )(1
)](1[)()](1[ (7) and (4) of half-left From
3
3
3
(8)
(9)
(10)

Delay Bounds in RC Trees
[ ]
[ ]
[ ] p
Di
ip
DipRp
Ri
D
p
Ri
ip
RRRD
ip
TT
tvtvT
TTTTt
Ttv
Tt
TT
tvtvT
TTTTt
tvTTt
i
i
i
i
ii
iii
−≥−
+−≤
−−
≤
−≥−
+−≥
−−≥
1)( when )(1
ln
)(1
:boundsUpper
1)(hen w)(1
ln
)(1:boundsLower
iD

Computation of Elmore Delay & Delay Bounds in RC Trees
• Let C(Tk) be total capacitance of subtree rooted at k• Elmore delay
fashion up-bottom ain y recursivel elinear timin computed becan formula threeall *
:boundlower
)( :boundupper
)(
2∑
∑
∑
⋅=
⋅=
⋅=∈
k ii
kkiR
kkkp
pkkkD
RCRT
TCRT
TCRT
i
i
i

Comments on Elmore Delay Model
• Advantages– Simple closed-form expression
• Useful for interconnect optimization– Upper bound of 50% delay [Gupta et al., DAC’95, TCAD’97]
• Actual delay asymptotically approaches Elmore delay as input signal rise time increases
– High fidelity [Boese et al., ICCD’93],[Cong-He, TODAES’96]• Good solutions under Elmore delay are good solutions under
actual (SPICE) delay

Comments on Elmore Delay Model
• Disadvantages– Low accuracy, especially poor for slope computation– Inherently cannot handle inductance effect
• Elmore delay is first moment of impulse response• Need higher order moments

















