EITG05 – Digital Communications Lecture 11 Intersymbol Interference Nyquist condition, Spectral raised cosine, Equalizers Michael Lentmaier Thursday, October 11, 2018 Intersymbol Interference (ISI) For R s = 1/T s < 1/T u we can use the ML receiver from Chapter 4 Question: can we use such a receiver for larger rates R s ≥ 1/T u ? Consider the following receiver structure (compare to last slide) h(t) m[i] ^ + t=t +LT +iT 0 s s Threshold detector [i] ξ s A[n]g(t-nT ) n= 8 v(t) Channel Transmitter w(t) z(t) s(t) = ∑ 8 r(t) y(t) Receiver Note that z(t) now is a superposition of overlapping pulses u(t) The signal y(t) after the receiver filter v(t) is y(t)= ∞ ∑ n=−∞ A[n] x(t − nT s )+ w c (t) , where w c (t) is a filtered Gaussian process The decision variable is obtained after sampling ξ [i]= y(T + iT s ) , T = t 0 + LT s , where LT s ≥ T u Michael Lentmaier, Fall 2018 Digital Communications: Lecture 11 Illustration of ISI in the receiver ξ[0] ξ[1] [3] ξ [2] ξ T s T =T u s 2T s 3T s 4T s 5T s T =T u s y(t) Individual pulses t 0 ξ [0] ξ [1] [2] ξ T s T s 2 s T 3T s 2T s T s 2 T = u y(t) t 2T s ξ [0] ξ [1] [2] ξ [3] ξ ξ [4] s T s T s T s T T =2T u s ISI ISI . . . . . . t Message term Michael Lentmaier, Fall 2018 Digital Communications: Lecture 11 Discrete time model for ISI According to our model the decision variable can be written as ξ [i]= y(T + iT s )= ∞ ∑ n=−∞ A[n] x(T + iT s − nT s )+ w c (T + iT s ) Let us introduce the discrete sequences x[i]= x(T + iT s ) , w c [i]= w c (T + iT s ) This leads to the following discrete-time model of our system [i] ξ + w [i] c x[i] Threshold detection m[i] ^ A[i] ξ [i]= ∞ ∑ n=−∞ A[n] x[i − n]+ w c [i]= A[i] ∗ x[i]+ w c [i] Remark: the discrete-time impulse response x[i] represents pulse shape g(t), channel filter h(t), and receiver filter v(t) Michael Lentmaier, Fall 2018 Digital Communications: Lecture 11
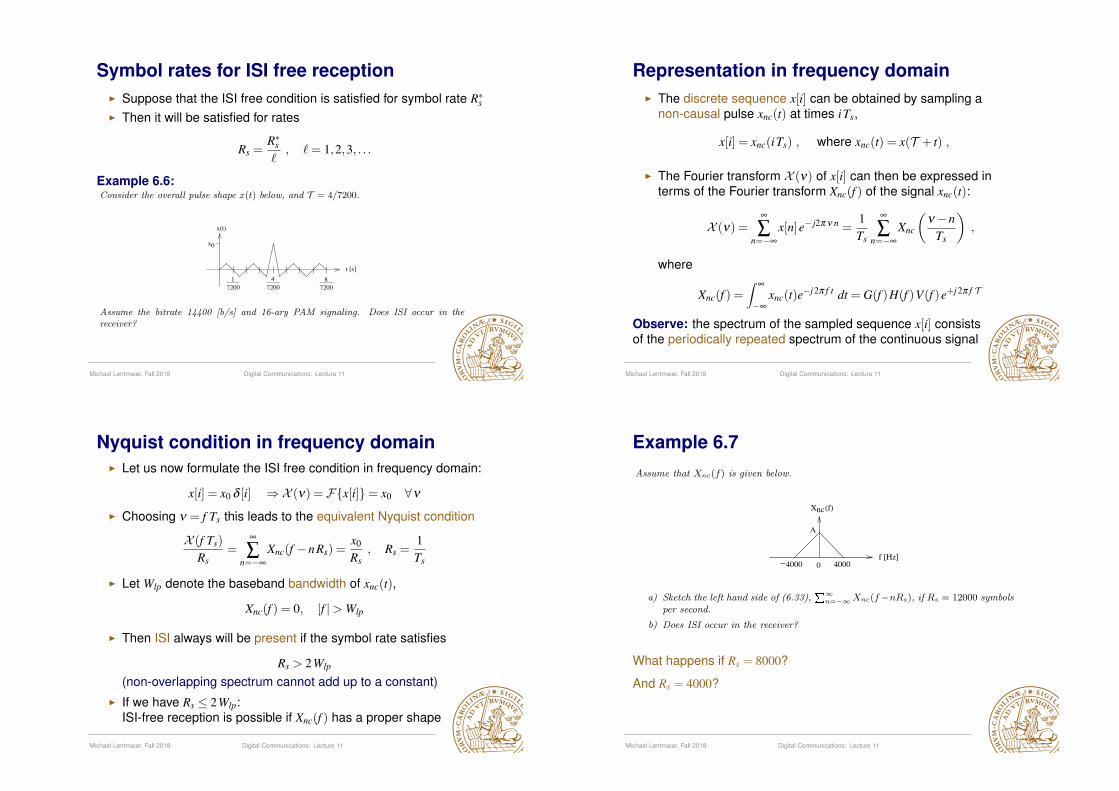
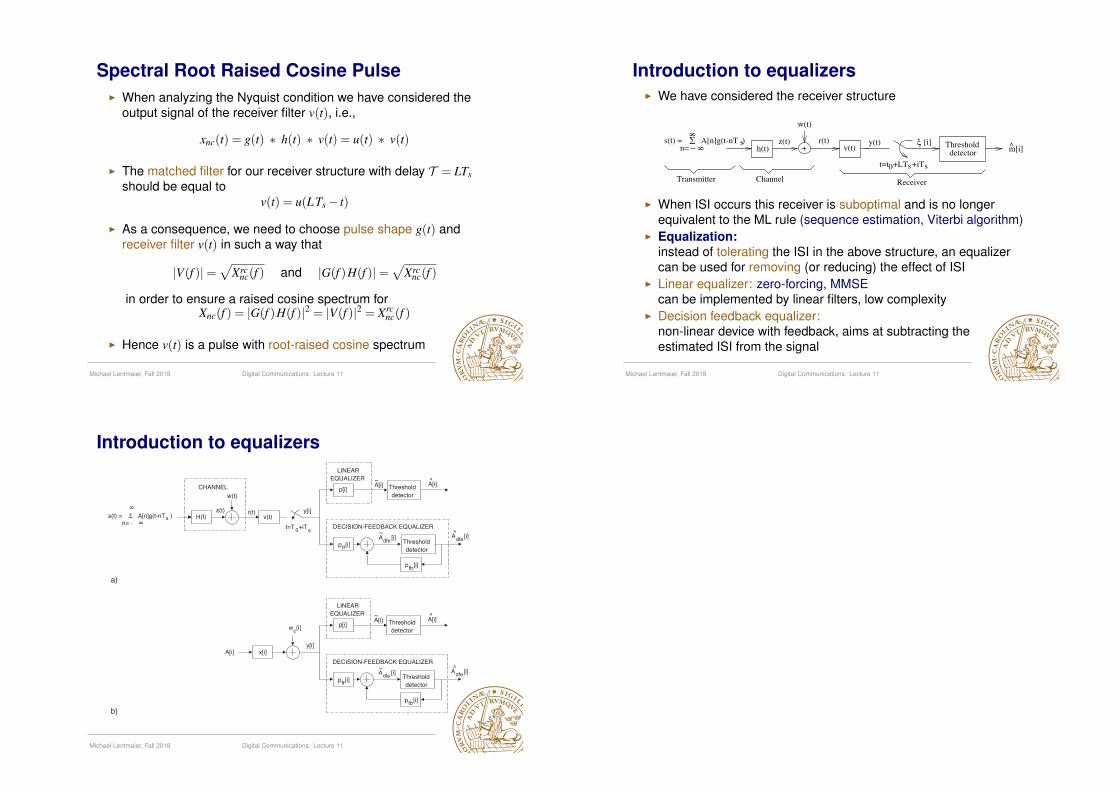
Intersymbol Interference (ISI)� For Rs = 1/Ts < 1/Tu we can use the ML receiver from Chapter 4� Question: can we use such a receiver for larger rates Rs ≥ 1/Tu?� Consider the following receiver structure (compare to last slide)
h(t) m[i]^+
t=t +LT +iT0 s s
Thresholddetector
[i]ξsA[n]g(t-nT )n= 8 v(t)
ChannelTransmitter
w(t)
z(t)s(t) = ∑
8
r(t) y(t)
Receiver
� Note that z(t) now is a superposition of overlapping pulses u(t)� The signal y(t) after the receiver filter v(t) is
y(t) =∞
∑n=−∞
A[n]x(t−nTs)+wc(t) ,
where wc(t) is a filtered Gaussian process� The decision variable is obtained after sampling
ξ [i] = y(T + iTs) , T = t0 +LTs , where LTs ≥ Tu
Michael Lentmaier, Fall 2018 Digital Communications: Lecture 11
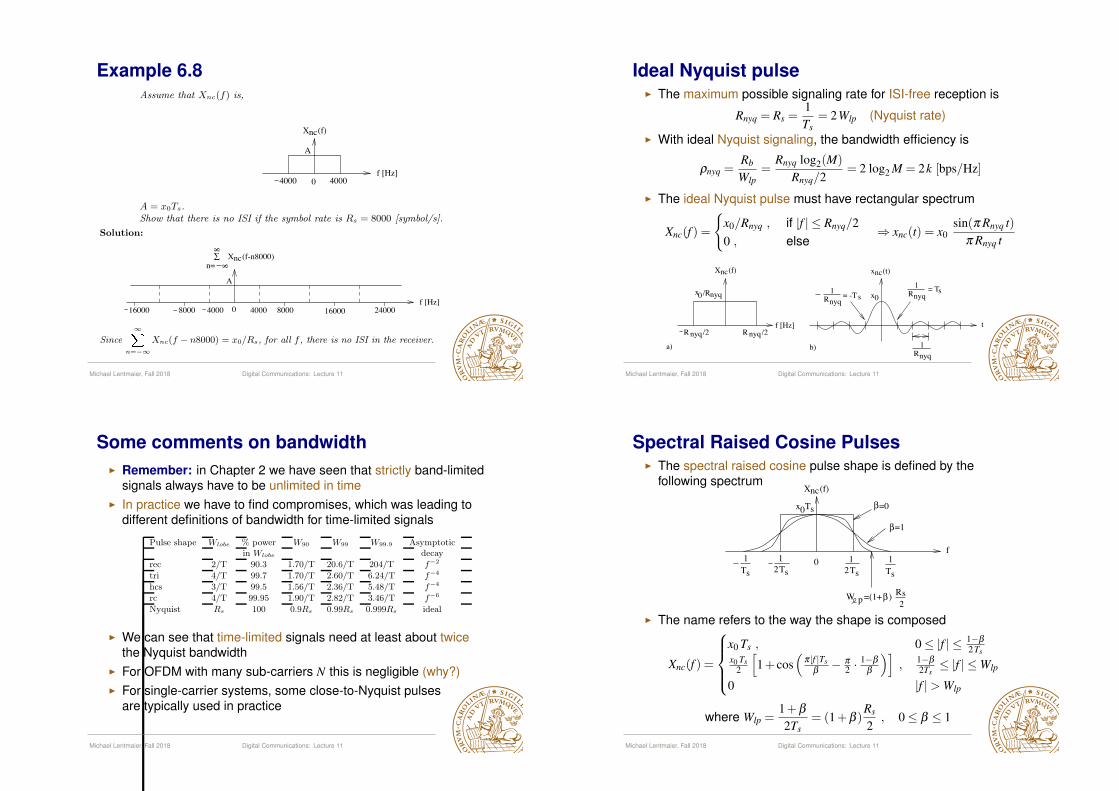
Illustration of ISI in the receiver
ξ [0] ξ [1] [3]ξ[2]ξ
TsT =Tu s
2Ts 3Ts 4Ts 5TsT =Tu s
y(t)
Individual pulses
t0
ξ [0] ξ [1] [2]ξ
Ts
Ts2 sT 3Ts2Ts
Ts2
T =uy(t)
t
2Ts
ξ [0] ξ [1] [2]ξ [3]ξ ξ [4]
sT sT sTsT
T =2Tu s
ISI
ISI
. . . . . .
t
Message term
Michael Lentmaier, Fall 2018 Digital Communications: Lecture 11
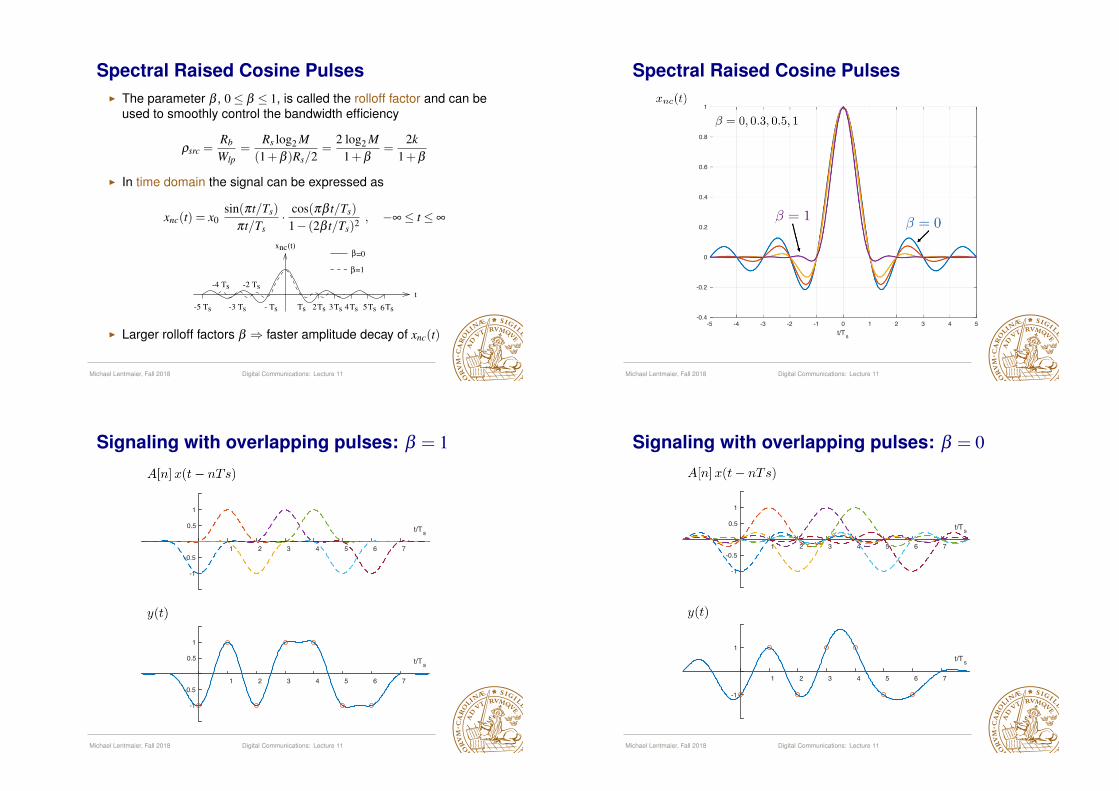
Discrete time model for ISI� According to our model the decision variable can be written as
ξ [i] = y(T + iTs) =∞
∑n=−∞
A[n]x(T + iTs −nTs)+wc(T + iTs)
� Let us introduce the discrete sequences
x[i] = x(T + iTs) , wc[i] = wc(T + iTs)
� This leads to the following discrete-time model of our system
[i]ξ+
w [i]c
x[i] Thresholddetection m[i]^A[i]
ξ [i] =∞
∑n=−∞
A[n]x[i−n]+wc[i] = A[i] ∗ x[i]+wc[i]
Remark: the discrete-time impulse response x[i] representspulse shape g(t), channel filter h(t), and receiver filter v(t)
Michael Lentmaier, Fall 2018 Digital Communications: Lecture 11
Example 6.1The transmitted sequence of amplitudes A[i] is given as,
A[i]
1
1 5 8 9i
Calculate, and plot, the sequence of decision variables ξ[i] in Figure 6.2, for 0 ≤ i ≤ 8,in the noiseless case (i.e. w(t) = 0) if t0 = 0 and if the output pulse x(t) is:
Ts 2Ts
x0
2Ts 4TsTs
x0
x(t)
0t
x(t)
t
i) L=1 and x(t) as below. ii) L=2 and x(t) as below.