22
Inverse Kinematics Kris Hauser CS B659: Principles of Intelligent Robot Motion Spring 2013
| Date post: | 29-Dec-2015 |
| Category: |
Documents |
| Upload: | lewis-thompson |
| View: | 231 times |
| Download: | 0 times |

Inverse KinematicsKris HauserCS B659: Principles of Intelligent Robot MotionSpring 2013

Articulated Robot• Robot: usually a rigid
articulated structure• Geometric CAD models,
relative to reference frames
• A configuration specifies the placement of those frames (forward kinematics)
q1
q2

Inverse Kinematics
• Problem: given desired position of point on robot (end effector), what joint angles reach it?

Inverse Kinematics
• Problem: given desired position of point on robot (end effector), what joint angles reach it?
q1
q2
q3
q4

Inverse Kinematics
• Bring point xn on link n to target xT
• Find q s.t. xT = Tn(q)xn
q1
q2
q3
q4

Solving a general equation
• Solve f(q) = 0 (vector valued nonlinear function)• Can include rotation constraints, multiple IK targets
q1
q2
q3
q4

Two Approaches for IK
• Analytical. Write out the equation in terms of q and “invert” it• Sometimes there are simple solutions for certain kinematic
structures (e.g., industrial robots). If so, computation is fast.
• Numerical. Iteratively move q to a solution point f(q)=0• General purpose• Can incorporate joint limits easily• May fall into local minima
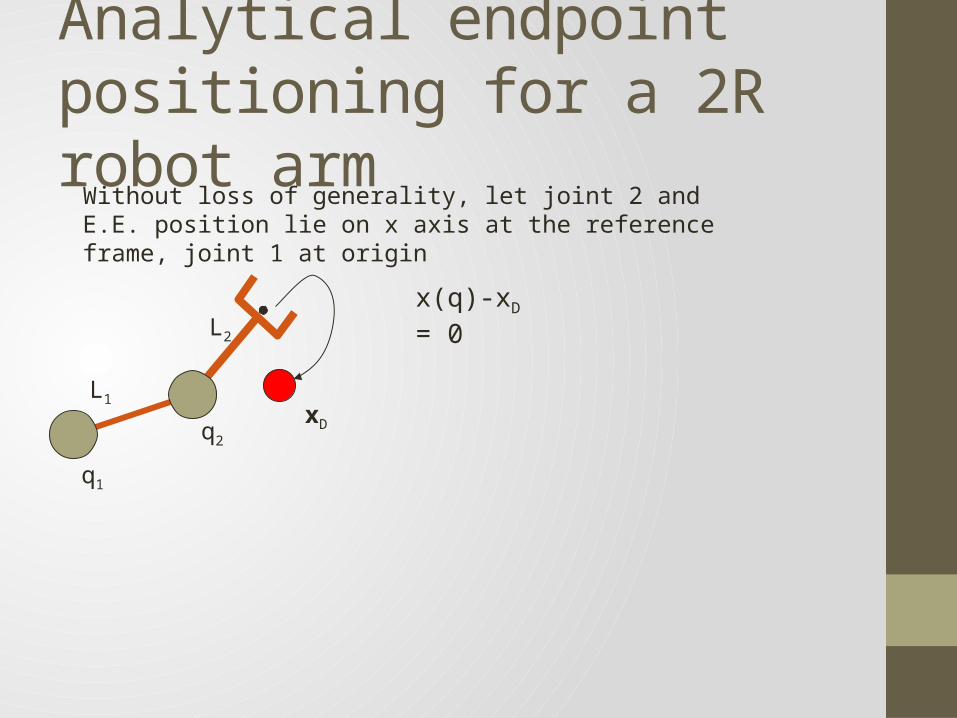
Analytical endpoint positioning for a 2R robot arm
q1
q2
Without loss of generality, let joint 2 and E.E. position lie on x axis at the reference frame, joint 1 at origin
xD
x(q)-xD = 0
L1
L2

Analytical endpoint positioning for a 2R robot arm
q1
q2
Without loss of generality (why?), let joint 2 and E.E. position lie on x axis at the reference frame, joint 1 at origin
xD
x(q)-xD = 0
||x(q)||2 = ||xD||2 (lhs depends only on q2)||x(q)||2 = (L1 + c2L2)2 + (s2L2)2
= L12 + 2c2L2L1 + c2
2L22 + s2
2L22
= L12 + L2
2 + 2c2L2L1
L1
L2

Analytical endpoint positioning for a 2R robot arm
q1
q2
Without loss of generality, let joint 2 and E.E. position lie on x axis at the reference frame, joint 1 at origin
xD
x(q)-xD = 0
||x(q)||2 = ||xD||2 (lhs depends only on q2)||x(q)||2 = (L1 + c2L2)2 + (s2L2)2
= L12 + 2c2L2L1 + c2
2L22 + s2
2L22
= L12 + L2
2 + 2c2L2L1
c2 = (||xD||2 - L12 - L2
2)/(2L2L1)
If rhs > 1, xD is out of reachIf rhs < -1, xD is inside “inner circle”
L1
L2
c2(q2)
Elbow up Elbow down

Analytical endpoint positioning for a 2R robot arm
q1
q2down
Without loss of generality, let joint 2 and E.E. position lie on x axis at the reference frame, joint 1 at origin
xD
x(q)-xD = 0
||x(q)||2 = ||xD||2 (lhs depends only on q2)||x(q)||2 = (L1 + c2L2)2 + (s2L2)2
= L12 + 2c2L2L1 + c2
2L22 + s2
2L22
= L12 + L2
2 + 2c2L2L1
c2 = (||xD||2 - L12 - L2
2)/(2L2L1)
If rhs > 1, xD is out of reachIf rhs < -1, xD is inside “inner circle”
L1
c2(q2)
Elbow up Elbow down
q2up

Analytical endpoint positioning for a 2R robot arm
q1
Without loss of generality, let joint 2 and E.E. position lie on x axis at the reference frame, joint 1 at origin
xD
x(q)-xD = 0
L1
q2
Once q2 is found, consider angle θD of xD w.r.t origin

Analytical endpoint positioning for a 2R robot arm
q1
Without loss of generality, let joint 2 and E.E. position lie on x axis at the reference frame, joint 1 at origin
xD
x(q)-xD = 0
L1
q2
Once q2 is found, consider angle θD of xD w.r.t originCompute angle θ of E.E. at q=(0,q2)

Analytical endpoint positioning for a 2R robot arm
q1
Without loss of generality, let joint 2 and E.E. position lie on x axis at the reference frame, joint 1 at origin
xD
x(q)-xD = 0
L1
q2
Once q2 is found, consider angle θD of xD w.r.t originCompute angle θ of E.E. at q=(0,q2)Let q1 = θD-θDone!

Analytical positioning and orienting for a 3R robot arm• Left as an exercise• Hint: consider solution in prior slides for choosing the first two
joint angles so that the third joint is located at the correct location. Then pick the third.

Drawbacks to Analytical IK• Most 6DOF robots encountered in practice are designed to have
convenient analytical IK solutions (e.g., 3 intersecting orthogonal axes)
• General methods for 6DOF robots require solving a high-degree (16) polynomial, which is computationally expensive and suffers from numerical difficulties
• What about a redundant manipulator (> 6 DOF)?

Papers

Multiplicity issue
• Let n = # of DOFs, m = # of constraints• Roughly, in common cases
• If n < m, there will be 0 IK solutions• If n = m, there may be 1 or more solution• If n > m, there will either be 0 or infinite number of solutions
• Singularities: the uncommon case

Null Space
• A motion from q->q’ that maintains f(q)=0 is known as a motion in the null space.

Null Space
• Null space velocity dq must satisfy J(q)dq = 0• => dq lies in the null space of J(q)• For any vector y, (I-J+J)y lies in the null space
• Recall J+ is the pseudoinverse of J• A basis of the null space can be found by SVD
• J = UWVT
• Let the last k diagonal entries of W be 0, first n-k nonzero• WVTdq = 0• First n-k entries of VTdq must be zero• Last k entries of VTdq may be non zero• => Last k columns of V are a basis for null space

Reminder: Project Proposals• 2-3 paragraphs, due 2/1• Include:
• Title, group members• Motivation, significance, and expected demonstration.• List of 3-4 milestones
• Milestone 1 must be completed, or else you will feel like a total failure. Usually complete this before spring break.
• Milestone 2 should be completed, or else you will feel bad and will deserve a less than stellar grade.
• Completing milestone 3 will make you (and me) feel pleased with your project.
• Milestone 4 will make you (and me) very excited, yet is still possible. (Don‘t promise to cure cancer.)
• Any other details, e.g., implementation, that may be relevant

Recap• Two general ways of solving inverse kinematics: analytical and
numerical• With nonredundant manipulators, there are a finite number of
solutions (usually > 1, without joint limits)• With redundant manipulators, there are an infinite number of
solutions• Null space motions

















