19
Iterative Closest Point (ICP) Algorithm. L 1 solution. . . Yaroslav Halchenko CS @ NJIT Iterative Closest Point (ICP) Algorithm. – p.
| Date post: | 26-May-2018 |
| Category: |
Documents |
| Upload: | trinhkhanh |
| View: | 219 times |
| Download: | 0 times |

Iterative Closest Point (ICP)Algorithm.L1 solution. . .
Yaroslav Halchenko
CS @ NJIT
Iterative Closest Point (ICP) Algorithm. – p. 1
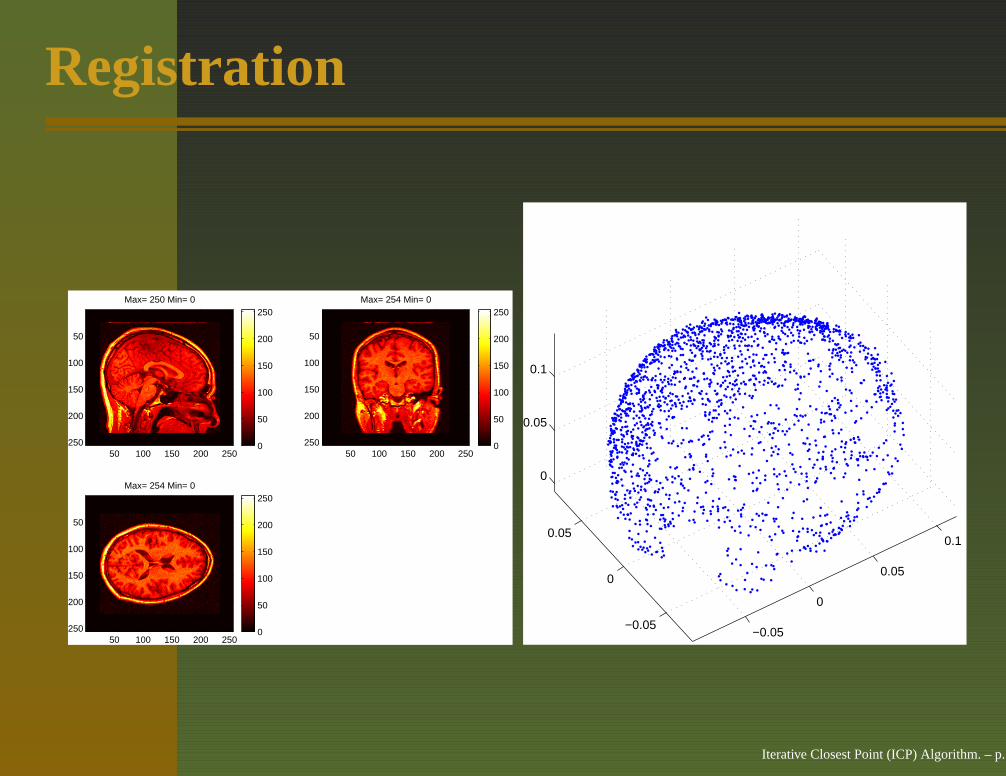
Registration
0
50
100
150
200
250Max= 250 Min= 0
50 100 150 200 250
50
100
150
200
250 0
50
100
150
200
250Max= 254 Min= 0
50 100 150 200 250
50
100
150
200
250
0
50
100
150
200
250Max= 254 Min= 0
50 100 150 200 250
50
100
150
200
250 −0.05
0
0.05
0.1
−0.05
0
0.05
0
0.05
0.1
Iterative Closest Point (ICP) Algorithm. – p. 2
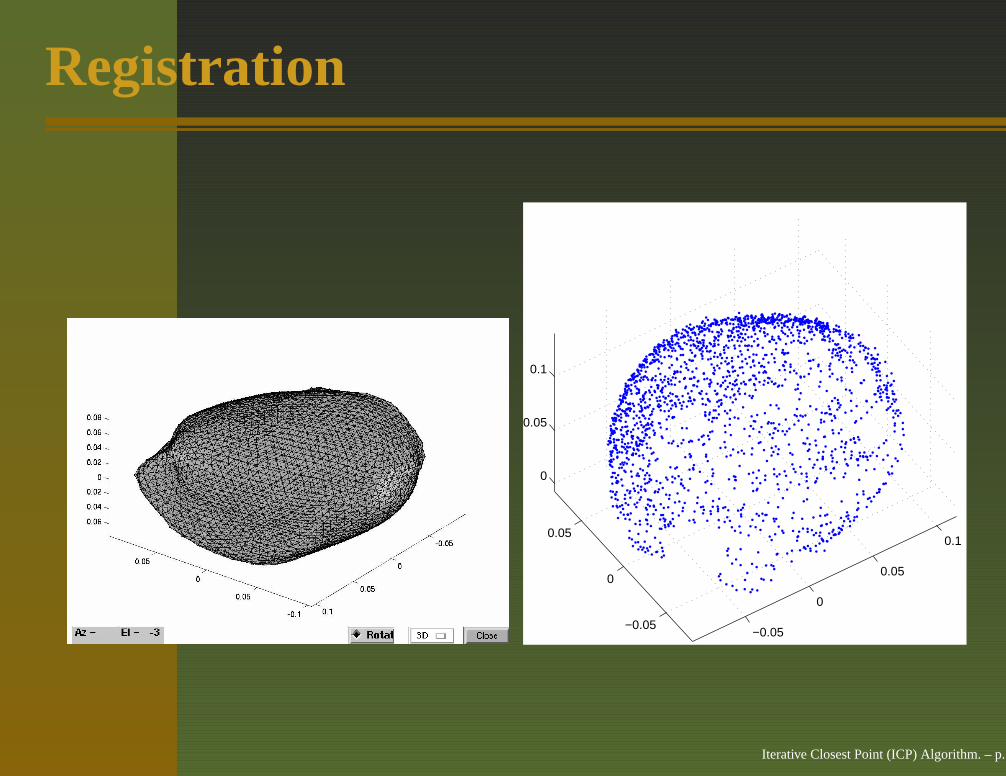
Registration
−0.05
0
0.05
0.1
−0.05
0
0.05
0
0.05
0.1
Iterative Closest Point (ICP) Algorithm. – p. 3
Iterative Closest Point
ICP is a straightforward method [Besl 1992] to align twofree-form shapes (model X , object P ):
Initial transformation
Iterative procedure to converge to local minima1. ∀p ∈ P find closest point x ∈ X
2. Transform Pk+1 ← Q(Pk) to minimize distancesbetween each p and x
3. Terminate when change in the error falls below apreset threshold
Choose the best among found solutions for differentinitial positions
Iterative Closest Point (ICP) Algorithm. – p. 4
Specifics of Original ICP
Converges to local minima
Based on minimizing squared-error
Suggests ‘Accelerated ICP’
Iterative Closest Point (ICP) Algorithm. – p. 5
ICP Refinements
Different methods/strategies
to speed-up closest point selectionK-d trees, dynamic cachingsampling of model and object points
to avoid local minimaremoval of outliersstochastic ICP, simulated annealing, weightinguse other metrics (point-to-surface vs -point)use additional information besides geometry(color, curvature)
Iterative Closest Point (ICP) Algorithm. – p. 6
ICP Refinements
Different methods/strategies
to speed-up closest point selectionK-d trees, dynamic cachingsampling of model and object points
to avoid local minimaremoval of outliersstochastic ICP, simulated annealing, weightinguse other metrics (point-to-surface vs -point)use additional information besides geometry(color, curvature)
All closed-form solutions are for squared-error ondistances
Iterative Closest Point (ICP) Algorithm. – p. 6
Found on the Web
Tons of papers/reviews/articles
No publicly available Matlab code
Registration Magic Toolkit(http://asad.ods.org/RegMagicTKDoc) - fullfeatured registration toolkit with modified ICP
Iterative Closest Point (ICP) Algorithm. – p. 7
Implemented in This Work
Original ICP Method [Besl 1992]
Choice for caching of computed distances
Iterative Closest Point (ICP) Algorithm. – p. 8
Absolute Distances or L1 norm
Why bother?
More stable to presence of outliers
Better statistical estimator in case of non-gaussiannoise (sparse, high-kurtosis)
might help to avoid local minima’s
Iterative Closest Point (ICP) Algorithm. – p. 9
Absolute Distances or L1 norm
Why bother?
More stable to presence of outliers
Better statistical estimator in case of non-gaussiannoise (sparse, high-kurtosis)
might help to avoid local minima’s
How?
use some parametric approximation for y = |x| anddo non-linear optimization
present this as a convex linear programming problem
Iterative Closest Point (ICP) Algorithm. – p. 9

LP: Formulation
Absolute Values y = |x|
x ≤ y and −x ≤ y while minimizing y
Euclidean Distance ‖~v‖ =
√
v2x + v2
y
×
×
×
×
×
×
×
3.543.54
0.00×
4.582.00
1.344.82
×
×
5.003.541.34×
×
×
0.004.82
~v
|rx~v| ≤ ‖~v‖, |ry~v| ≤ ‖~v‖
Iterative Closest Point (ICP) Algorithm. – p. 10
LP: Rigid Transformation
Arguments: rotation matrix R and translation vector ~tRigid Transformation:
~̇p = R~p + ~t
Iterative Closest Point (ICP) Algorithm. – p. 11
LP: Rigid Transformation
Arguments: rotation matrix R and translation vector ~tRigid Transformation:
~̇p = R~p + ~t
Problem: How to ensure that R is rotation matrix?“Solution”: Take a set of “support” vectors in objectspace and specify their length explicitly.
‖~̇pj − ~̇pk‖ − ‖~pj − ~pk‖ = 0 ~pi, ~pj ∈ P
Iterative Closest Point (ICP) Algorithm. – p. 11
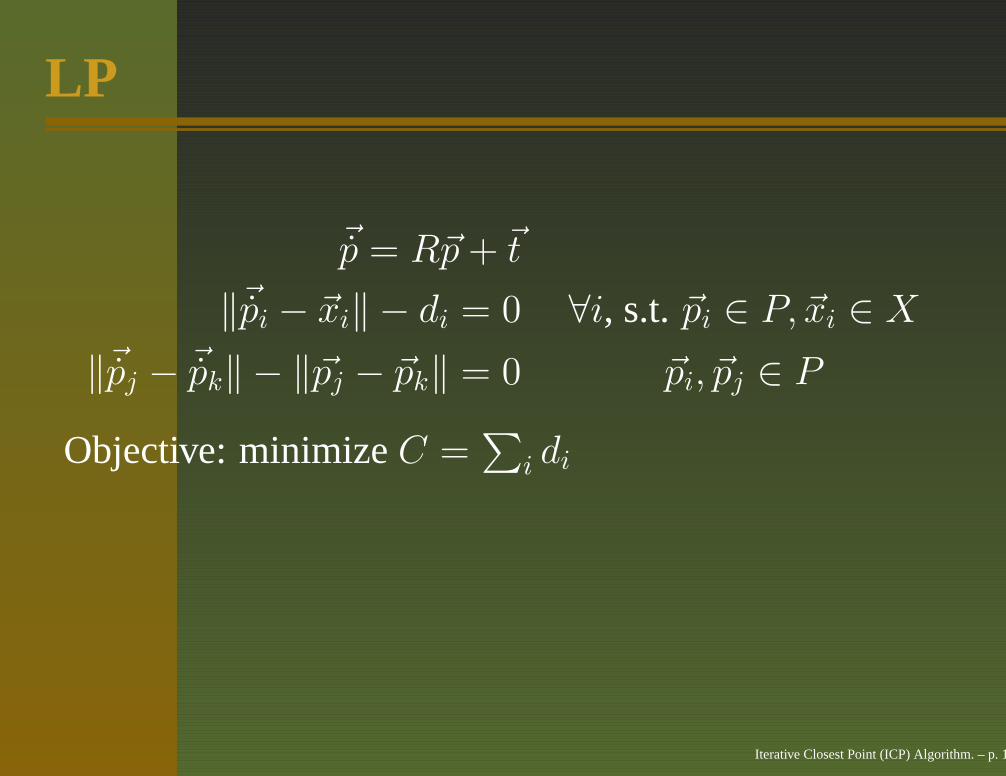
LP
~̇p = R~p + ~t
‖~̇pi − ~xi‖ − di = 0 ∀i, s.t. ~pi ∈ P, ~xi ∈ X
‖~̇pj − ~̇pk‖ − ‖~pj − ~pk‖ = 0 ~pi, ~pj ∈ P
Objective: minimize C =∑
i di
Iterative Closest Point (ICP) Algorithm. – p. 12
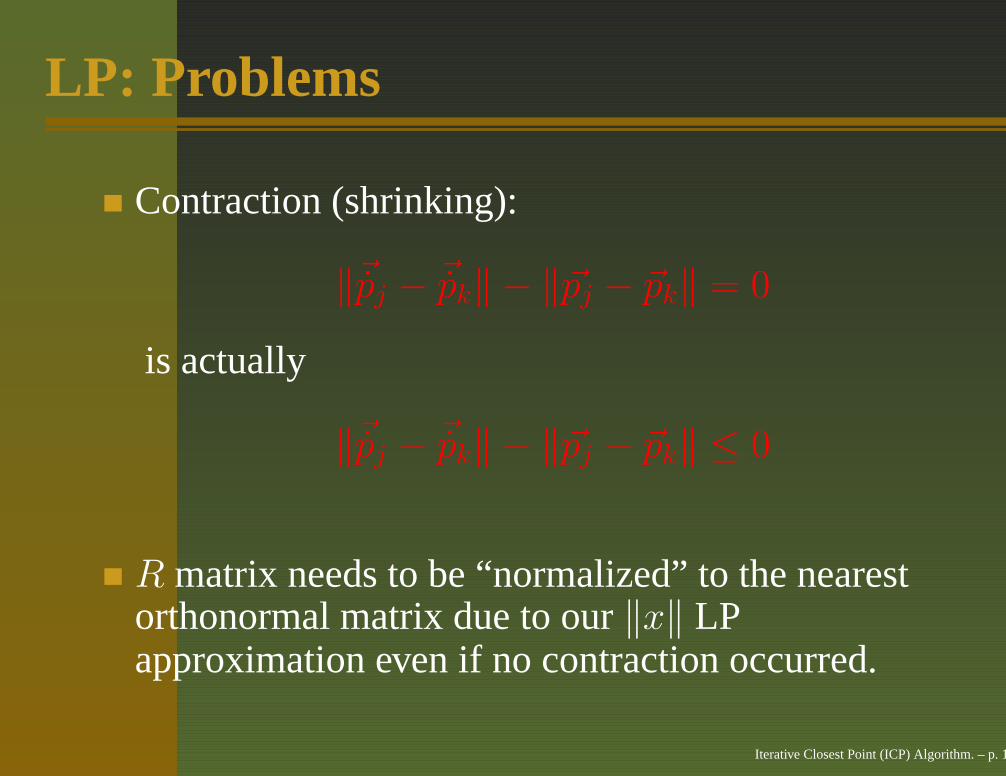
LP: Problems
Contraction (shrinking):
‖~̇pj − ~̇pk‖ − ‖~pj − ~pk‖ = 0
is actually
‖~̇pj − ~̇pk‖ − ‖~pj − ~pk‖ ≤ 0
R matrix needs to be “normalized” to the nearestorthonormal matrix due to our ‖x‖ LPapproximation even if no contraction occurred.
Iterative Closest Point (ICP) Algorithm. – p. 13
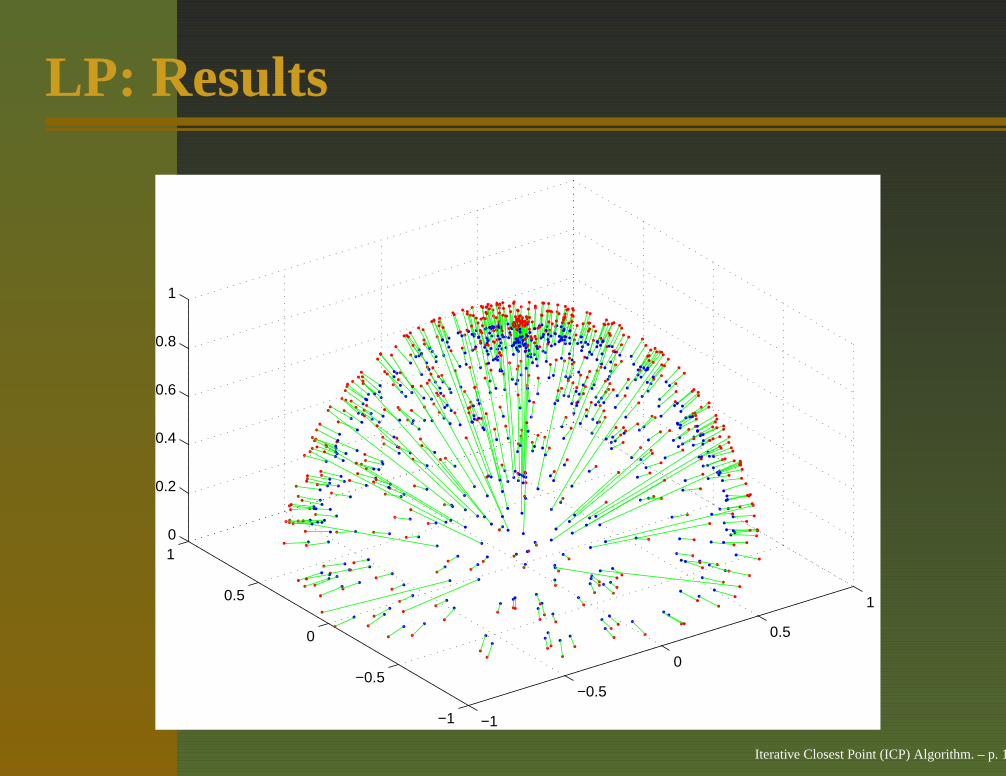
LP: Results
−1
−0.5
0
0.5
1
−1
−0.5
0
0.5
10
0.2
0.4
0.6
0.8
1
Iterative Closest Point (ICP) Algorithm. – p. 14
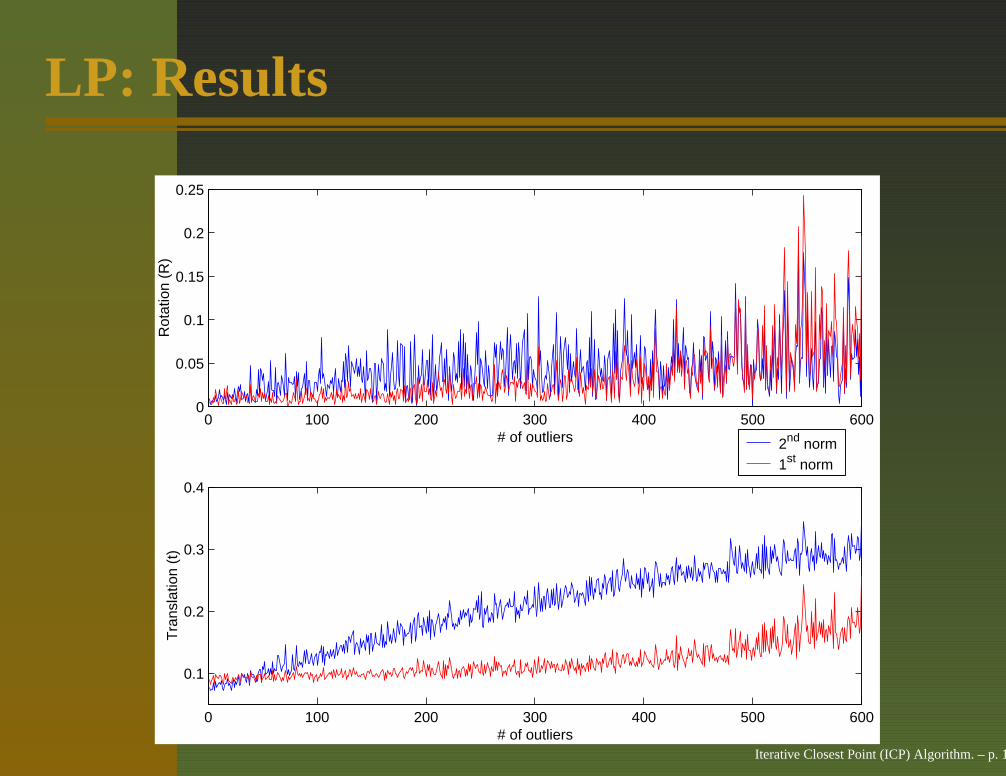
LP: Results
0 100 200 300 400 500 6000
0.05
0.1
0.15
0.2
0.25
Rot
atio
n (R
)
# of outliers
0 100 200 300 400 500 600
0.1
0.2
0.3
0.4
Tra
nsla
tion
(t)
# of outliers
2nd norm1st norm
Iterative Closest Point (ICP) Algorithm. – p. 15
LP: Conclusions
Presented problem is suitable to minimize L1 errorinstead of L2 error commonly used.
Using L1 norm improved solution in the presence ofstrong outliers.
Iterative Closest Point (ICP) Algorithm. – p. 16

![Scaling iterative closest point algorithm using dual ... iterative closest point algorithm... · 1100 W. Xia et al. / Optik 140 (2017) 1099–1109 [15] improved the ICP algorithm](https://static.documents.pub/doc/80x56/5cf401de88c993d5048c2231/scaling-iterative-closest-point-algorithm-using-dual-iterative-closest-point.jpg)





![Experimental methodology for benchmarking ICP-like algorithms€¦ · the Iterative Closest Point (ICP) algorithm (principle bor-rowed from the computer vision community [3], where](https://static.documents.pub/doc/80x56/604b087cd819e064712e8561/experimental-methodology-for-benchmarking-icp-like-the-iterative-closest-point-icp.jpg)


![NICP: Dense Normal Based Point Cloud Registration · The Iterative Closest Point (ICP) algorithm [?] is one of the earliest and most used techniques for registering point clouds.](https://static.documents.pub/doc/80x56/604b0675295ea8404f2df250/nicp-dense-normal-based-point-cloud-registration-the-iterative-closest-point-icp.jpg)
![Accurate Sphere Marker-Based Registration System of 3D ... · most well-known algorithm for fine registration is the Iterative Closest Point (ICP) by Besl and McKay [1]. The algorithm](https://static.documents.pub/doc/80x56/604b0675295ea8404f2df251/accurate-sphere-marker-based-registration-system-of-3d-most-well-known-algorithm.jpg)



![Robust 3D Shape Correspondence in the Spectral Domainhaoz/pubs/jain_zhang_smi06.pdfthe well known iterative closest point (ICP) algorithm of Besl and Mckay [4] and its variants [28],](https://static.documents.pub/doc/80x56/604b067b295ea8404f2df26b/robust-3d-shape-correspondence-in-the-spectral-domain-haozpubsjainzhangsmi06pdf.jpg)
![3DRegNet: A Deep Neural Network for 3D Point Registration · The ICP is widely considered as the gold standard ap-proach to solve point cloud registration [6,44]. However since ICP](https://static.documents.pub/doc/80x56/5f4594b06fbc1805d5053b19/3dregnet-a-deep-neural-network-for-3d-point-registration-the-icp-is-widely-considered.jpg)
