IV/IV B.Tech (Regular) DEGREE EXAMINATION APRIL , 2017 Second Semester ELECTRONICS & INSTRUMENTATION ENGINEERING PC Based Instrumentation(EI423) PART-A Answer all questions 12X1=12M SOLUTION: 1a..What is meant by data acquisition system? A:A data acquisition system performs the conversion of digital data into analog and digital data into analog and it is interfaced to a PC to implement functions of a measurement and control instrumentation applications. b.What is VME bus? A:VME bus is a computer bus standard ,originaly developed for Motorola 68000 line of CPUs and it is physically based on Eurocard sizes ,mechanical connectors ,but uses it own signalling system. c.List out different types of device drivers. A: 1.Block Device Driver 2.Character Device Driver 3.Network Device Driver 4.Pseudodevice Driver d.What is an embedded controller? It consists of User Interface,Real-time processor,Digital I/O ,Analog I/O and peripherals.It can acquire data and analyse and control and present data. e.What is VI? A:Virtual instrumentation includes PC with flexible software and a wide variety of measurement and control hardware. f.State the merits and demerits of ISA bus standard?
Transcript
IV/IV B.Tech (Regular) DEGREE EXAMINATION
APRIL , 2017 Second Semester
ELECTRONICS & INSTRUMENTATION ENGINEERING
PC Based Instrumentation(EI423)
PART-A
Answer all questions 12X1=12M
SOLUTION:
1a..What is meant by data acquisition system?
A:A data acquisition system performs the conversion of digital data into analog and digital data into
analog and it is interfaced to a PC to implement functions of a measurement and control
instrumentation applications.
b.What is VME bus?
A:VME bus is a computer bus standard ,originaly developed for Motorola 68000 line of CPUs and it is
physically based on Eurocard sizes ,mechanical connectors ,but uses it own signalling system.
c.List out different types of device drivers.
A: 1.Block Device Driver
2.Character Device Driver
3.Network Device Driver
4.Pseudodevice Driver
d.What is an embedded controller?
It consists of User Interface,Real-time processor,Digital I/O ,Analog I/O and peripherals.It
can acquire data and analyse and control and present data.
e.What is VI?
A:Virtual instrumentation includes PC with flexible software and a wide variety of
measurement and control hardware.
f.State the merits and demerits of ISA bus standard?
A:The ISA bus standard has the advantage that many peripheral boards have beeb developed
for it and competition has kept the price of these boards low
Demerit:The ISA bus has only 16 data lines and 24 address lines ,so it canot take full
advantage of 32-bit data bus and 32-bit address bus of 80386.This reduces the speed at which
data can be transferred on the bus.
g.What is a formula node in VI?
A: Formula Node helps to minimize the space required on the block diagram to execute a
mathematical expression.
h.What is Ethernet?
Ethernet is a network protocol that controls how data is transmitted over a LAN. Technically
it is referred to as the IEEE 802.3 protocol. The protocol has evolved and improved over time
and can now deliver at the speed of a gigabit per second.
i.What is the purpose of VXI bus?
VXI is used in many different applications ranging from test and measurement and ATE, to
data acquisition and analysis in both research and industrial automation. A VXI system can
controlled with a remote general-purpose computer using the high-speed Multisystem
eXtension Interface (MXI) bus interface or GPIB.
j.What is USB standard?
USB, short for Universal Serial Bus, is an industry standard that defines the cables,
connectors and communications protocols used in a bus for connection, communication, and
power supply between computers and electronic devices.
k.List the features of GPIB?
The ANSI/IEEE standard 488.1 also known as General purpose Interface bus has the
following features:
1.a maximum separation of 4m between any two devices and an average separation of 2m
over the entire bus.
2.A maximum cable length of 20m
3.A maximum of 15 devices connected to each bus with at least two-thirds of the devices
powered on.
l.What is ISA bus standard.
A: An Industry Standard Architecture bus (ISA bus) is a computer bus that allows additional
expansion cards to be connected to a computer's motherboard. It is a standard bus architecture
for IBM compatibles.
PART-B
Answer all questions 12X2=24M
UNIT-1
2.a.Write and explain almost i.Data acquisition on PC ii .Digital I/O 3+3
A data acquisition and control system, built around the power and flexibility of the PC,
may consist of a wide variety of diverse hardware building blocks from different equipment
manufacturers. It is the task of the system integrator to bring together these
individual components into a complete working system.
The basic elements of a data acquisition system, as shown in the functional diagram of
Figure 2.a., are as follows:
• Sensors and transducers
• Field wiring
• Signal conditioning
• Data acquisition hardware
• PC (operating system)
• Data acquisition software
Digital I/O: Control devices, such as relays, and indicators such as LEDs, require digital
output signals like those provided on digital I/O boards.
The output signals from a flow meter or from an optical encoder mounted on a rotating
shaft are examples of a digital pulse train. It is also possible for a DAQ system to be
required to output a digital pulse train as part of the control process. A stepper motor, for
example, requires a series of digital pulses to control its speed and position. While input
and output digital pulse trains can be practically measured or produced using digital I/O
boards, counter/timer I/O boards are more effective in performing these functions
2.b.Explain about data transfer control signals. 2+2+2
Data transfer control signals: Three basic functions of the data transfer control signals are
1. To specify the source or destination of the data:
• The most important piece of information that must be sent out before the actual data
transfer takes place is the slave device address
• Most buses adopt the combined cycle method in which the slave address is
transmitted over the data bus or over a separate address bus
• In case of one way transfer control within the same bus transfer of address must
complete before the data are transferred.
• The time delay between the transfer of the address and the transfer of the data will
be specified by the address and the transfer of the data will be specified by the bus
protocol that define the decode and setup times required of devices interfaced to the
bus.
SPLIT CYCLE METHOD:-
- Some buses adopt the split cycle method in which address and data sent separately.
- This scheme is widely used in multi master systems.
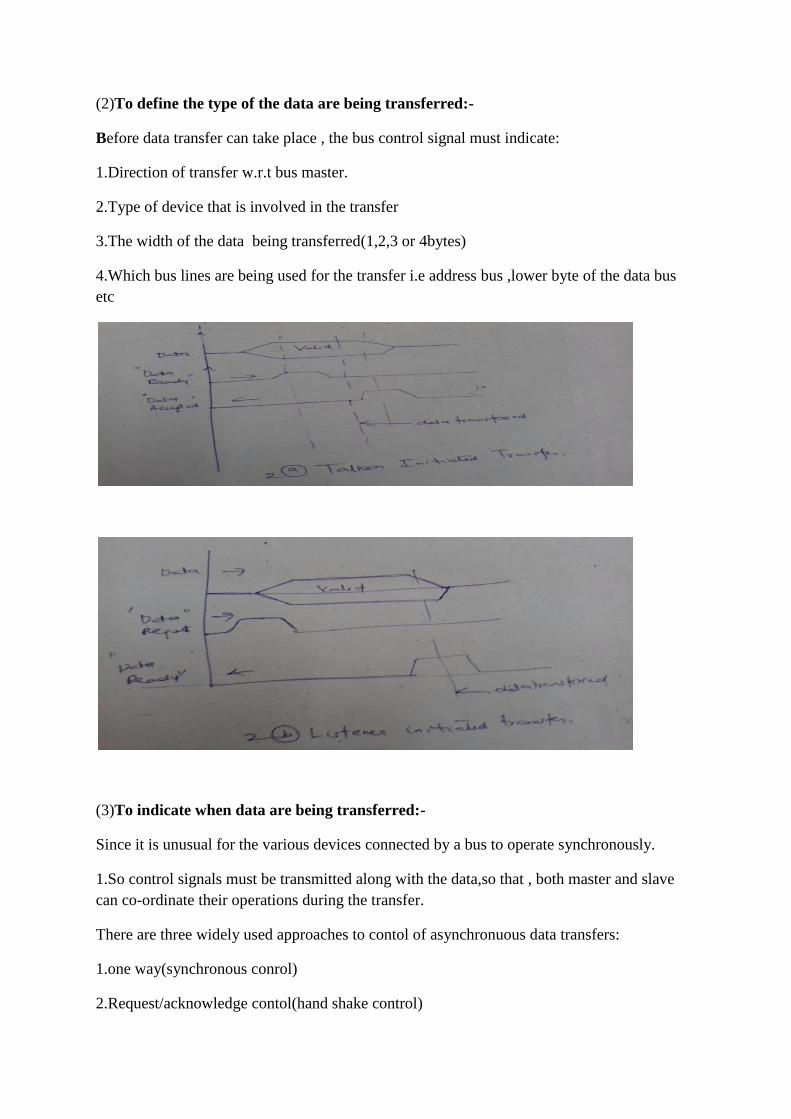
(2)To define the type of the data are being transferred:-
Before data transfer can take place , the bus control signal must indicate:
1.Direction of transfer w.r.t bus master.
2.Type of device that is involved in the transfer
3.The width of the data being transferred(1,2,3 or 4bytes)
4.Which bus lines are being used for the transfer i.e address bus ,lower byte of the data bus
etc
(3)To indicate when data are being transferred:-
Since it is unusual for the various devices connected by a bus to operate synchronously.
1.So control signals must be transmitted along with the data,so that , both master and slave
can co-ordinate their operations during the transfer.
There are three widely used approaches to contol of asynchronuous data transfers:
1.one way(synchronous conrol)
2.Request/acknowledge contol(hand shake control)
3.Semi synchronous control
4.Multi functional data transfer control
1.ONE –WAY (SYNCHRONOUS CONTROL):-
1.A single Data ready is sent out by the master after it has placed data on the data bus(if it is a
talker) (or)
2.Reading the data bus (if it is listner), the signal is called Data request.
3.The slave must respond to the active transition of the control signal with in a prescribed
time interval otherwise data will not be transferred properly.
4. Time intervals t1& t2 are highly dependent on implementation details like device operating
speed , bus propagation delay etc
Advantages with this approach:-
1. simplicity.
2. speed of communication.(i.e it has single bus propagation delay).
Disadvantages:-
1.This scheme is sensitive to transmission speed.
communicating devices that have very different operating speed is difficult & will lead to
inefficient use of the bus bandwidth.
(2)Request/acknowledge (handshake) control:-
Here two control are used.
1.Data Request:When it has successfully read the data if it is a listner.
2.Data Ready:when it has placed the data on the data bus if it is a talker.
Advantages:
1.Reduces the noise sensitivity.
2.Any speed is possible.
Disadvantages:
1.Each data transfer involves two bus propagation delays.
3.a.Explain about the various bus topologies.List the advantages and disadvantages.
figures -3m
+advantages+disadvantages-3m
BUS TOPOLOGY:
There are many ways of interconnecting devices so that information can be
transformed between them. The most suitable method of interconnection will depend on the
type of information to be transmitted how frequently transmission occurs, the way in which
the bus lines are shorted, and the urgency of communication.
The microcomputer can have one of the three basic topologies
1. Star Architecture
2. Daisy Chain Architecture
3. Party line Architecture
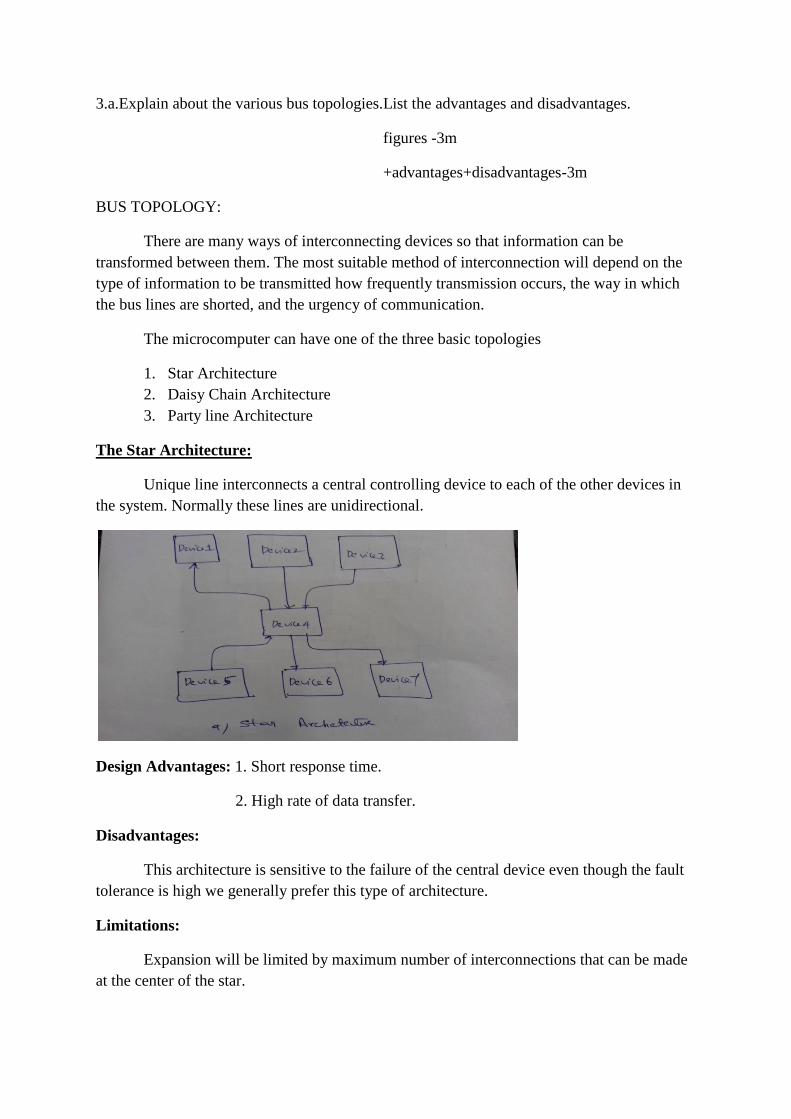
The Star Architecture:
Unique line interconnects a central controlling device to each of the other devices in
the system. Normally these lines are unidirectional.
Design Advantages: 1. Short response time.
2. High rate of data transfer.
Disadvantages:
This architecture is sensitive to the failure of the central device even though the fault
tolerance is high we generally prefer this type of architecture.
Limitations:
Expansion will be limited by maximum number of interconnections that can be made
at the center of the star.
Usage:
This is used only where rapid simultaneous transfer of information must occur
between a number of devices and one special device in the microcomputer system.
Example 1:- Power fail lines to the centralized power fail logic circuit in the distributed
system.
Example 2:- Interrupt request lines to a centralized Interrupt controller in a master that is
receiving several slaves.
The Daisy chain Architecture:
Unidirectional bus lines interconnect the devices to form a ring or loop. Devices read
in & re-transmit information along the dairy chain until the data reach the correct destination
device.
Disadvantages: 1. Data transfer is slow.
Reason: Due to the retransmission between the devices and device having the
propagation delay.
2. A fault on any one of the bus lines that for the ring will be seversely disrupt
operations, but some part of communication is possible.
Advantages: However, the no. of interconnections on any device is small and
interconnection logic is also simple.
Limitations: Expansion will be limited only by maximum loop delay which can be tolerated.
Usage: This topology is used where the positions of the devices around the loop has
significance or where the no. of devices interconnections must be kept minimum.
Example 1 & 2:-
The interrupt acknowledge lines of an interrupt controller or bus grant lines of a bus
controller.
Party line Architecture:
Information is sent out along a single set of bidirectional bus lines that interconnect
every device in the system.
Usage: 1. Point to point transmission: Only the destination device accepts the data.
2. Broadcaste transmission: All devices accept the data.
The party line Architecture requires relatively few interconnections.
Exact Usage: This is almost always used for high speed transmission of short blocks of the
data over short distances.
This is mostly used in single master microcomputer system at high data speed.
Disadvantages: Bus interconnection logic will be complex i.e., heavily multiplexed.
Limitations: Expansion of this architecture is limited only by the additional electrical
loading imposed on the bus.
Example 1:- Bus address and data lines scheme.
There are two types of party lines bus given below
1. Exclusive party line bus.
2. Public party line bus.
Exclusive Party line Bus:
This kind of scheme allows the bus is driven in one direction by one device at one
time.
Usage:
Exclusive Party line Bus: All the devices are connected with three state bus drivers
so one of the devices may be disconnected while the bus is being used.Public Party line
Bus: This is bi-directional & may be driven by several devices at the same time.
Usage:
Public Party line Bus: They are driven by via open collector bus driven so that the
transmitted information is the wired-OR (Active low logic signals)
OR
Wired- AND (Active high signals) of the outputs of the devices driving the bus.
3.b.Explain the features of ISA and VME Bus standards. 3+3
ISA bus architecture
ISA bus architecture is the basis of personal computer. 8-bit ISA bus is used in single user
systems with 80386 and 80486 processors. There are 24 address lines and '16 data lines in it.
It operates at 8 MHz and 2 to 8 clock cycles are needed to transfer data. The data transfer rate
of the system is less when 8-bit ISA bus is used with 32 bit processor having 32 bit address
and data bus. So, 16 bit ISA bus is used to transfer data. Many peripherals such as disk
controller, printer, and scanner can be connected to ISA bus.







































![sem 14 Process Control & Instrumentation part IV Control loops · B.T.S FEE [D. Bord lycée St Michel – 54] sem 14 Process Control & Instrumentation part IV Control loops This chapter](https://static.documents.pub/doc/80x56/5e8805758ec81924512801e6/sem-14-process-control-instrumentation-part-iv-control-loops-bts-fee-d.jpg)

