32
CORBA based Beam Dynamics Applications at the SLS JLab 11/02 Members of the SLS Beam Dynamics Group • J. Chrin, M. Mu ˜ noz, A. Streun, M. B ¨ oge Michael B ¨ oge 1

CORBA based Beam Dynamics Applications at the SLS
JLab 11/02
Members of the SLS Beam Dynamics Group
• J. Chrin, M. Munoz, A. Streun, M. Boge
Michael Boge 1

CORBA based Beam Dynamics Applications at the SLS
JLab 11/02
Overview
• Architectural Model for CORBA based Beam Dynamics Applications
• CORBA based Servers/Management
• “CORBA/Model Server” Hardware/Integration into the Control System
• CORBA based Clients
– Orbit Display
– Orbit Correction
– Local Bumps
– Tune Measurement
– Lifetime
– Phase Space Display
– Transferline Twiss Parameters
• Slow Orbit Feedback
Michael Boge 2

CORBA based Beam Dynamics Applications at the SLS
JLab 11/02
Overview (cont.)
• Slow Orbit Correction Demo ;-)
ocoocooco
oco
Michael Boge 3
CORBA based Beam Dynamics Applications at the SLS
JLab 11/02
Introduction
• SLS (Swiss Light Source) 2.4 GeV electron storage @ the Paul ScherrerInstitute, Switzerland
• Full energy injector booster synchrotron
• 100 MeV linac
• Operation since August 2001 ( 70% of beam time for users)
Large number of high-level beam dynamics applications, generic tasks:
• access to an accelerator physics package
• accelerator device control
• database access and management
• logging of messages and alarms
Michael Boge 4

CORBA based Beam Dynamics Applications at the SLS
JLab 11/02
SLS Layout
• Pre-Injector Linac
– 100 MeV
• Booster Synchrotron
– 100 MeV to 2.7 GeV @ 3 Hz
– εx = 9 nm rad
• Storage Ring
– 2.4 (2.7) GeV, 400 mA
– εx = 5 nm rad
• Initial Four Beamlines:MS – 4S, PX – 6S,SIS – 9L, SIM – 11M
Michael Boge 5

CORBA based Beam Dynamics Applications at the SLS
JLab 11/02
“Machine Model” and “Real Machine”
RealMachine
MachineModel
RealMachine
MachineModel
Time
• Improve the “Machine Model” at the same time as the “Real Machine”
Michael Boge 6

CORBA based Beam Dynamics Applications at the SLS
JLab 11/02
The CORBA Framework
• CORBA (Common Object Request Broker Architecture):“In the evolution of object-oriented distributed systems, CORBA is astandard that provides a mechanism for defining interfaces betweendistributed components.”
– Platform independence
– Language independence (Interface Definition Language (IDL))
• ORB (Object Request Broker):
– The ORB MICO CORBA 2.3 implementation GNU public license
– Implementation/Interface Repository facilities
– Naming Service and Event Service of the ORB
– IDL to C++ mapping through MICO
– Tcl mapping through Combat/MICO
– Java mapping through Java ORBacus 4
Michael Boge 7

CORBA based Beam Dynamics Applications at the SLS
JLab 11/02
Architectural Model for Beam Dynamics Applications
Applications are developed within a CORBA (Common Object Request BrokerArchitecture) framework:
Tcl/Tk Client
Java Client
Push Supplier
poll
monitor
get, set
access
Analysis Server
DatabaseServer
Event Channel
Push Consumer
Data Analysis
TRACYServer
Oracle Database
VME Hardware
CDEV Server
All Processes
C++ Client
Push Consumer
Push Consumerpush
push
pushchannel
Client Consoles
Net8
Net8
push
MessageServer
"Model Server"
Michael Boge 8

CORBA based Beam Dynamics Applications at the SLS
JLab 11/02
CORBA based Servers
• CDEV Server: provides CORBA interface to the narrow CDEV API.
• EZCA Server: provides CORBA interface to the narrow EZCA API.Hardware is accessed exclusively through CDEV and EZCA.
• Analysis Server: manipulates/recalibrates data retrieved by the CDEVServer (example: quadrupole strength <-> current). The Analysis Servercan provide monitored data through “EventChannel”s utilizing the CORBAEvent Service. Clients can subscribe to these channels and get dataautomatically pushed to them.
• TRACY Server: provides CORBA interface to selected routines of theTRACY Beam Dynamics library (example: routines for tracking, orbitcorrection).
Michael Boge 9
CORBA based Beam Dynamics Applications at the SLS
JLab 11/02
CORBA based Servers (cont.)
• Message Server: provides CORBA interface to the UNIX system loggingservice which allows the logging of messages with different priorities tovarious facilities. Messages are written to log files and to the ORACLEdatabase.
• Database Server: provides CORBA interface to the ORACLE database (theOCI8 API). The OTL (Oracle Template Library) is used as a wrapperaround the OCI8 API.
The Database Server completes the suite of essential services!
Michael Boge 10

CORBA based Beam Dynamics Applications at the SLS
JLab 11/02
Database Server - The Performance
For retrieval ofBLOBS fromthe OracleDatabase
C++: 400 Kb/sec
JDBC: 70 Kb/secCORBA:140 Kb/sec
Interface
LibraryOTL: Oracle Template
OCI: Oracle Call
Michael Boge 11

CORBA based Beam Dynamics Applications at the SLS
JLab 11/02
CDEV Server - The Portable Object Adapter
Naming Service
client
server
ORB daemon
STEP 2
STEP 1
servant
ORB daemon
imr activate
forward
activate server
noyes
new location
activated?
locate server
POA Mediator
Naming Service
activate server
Implementation Repository
Implementation Repository
POA Mediator
ORB daemon host
client host
invoke servant
server host
invoke initial request
IORsexchange
IOR POA Med
exchange IORs
IOR server
IOR POA Med
IOR server
IOR POA Med
Michael Boge 12

CORBA based Beam Dynamics Applications at the SLS
JLab 11/02
Server Management
Message logger
Michael Boge 13

CORBA based Beam Dynamics Applications at the SLS
JLab 11/02
Server Management (cont.)
226: run number 26 in run group 2name service manager
Message logger
Michael Boge 14
CORBA based Beam Dynamics Applications at the SLS
JLab 11/02
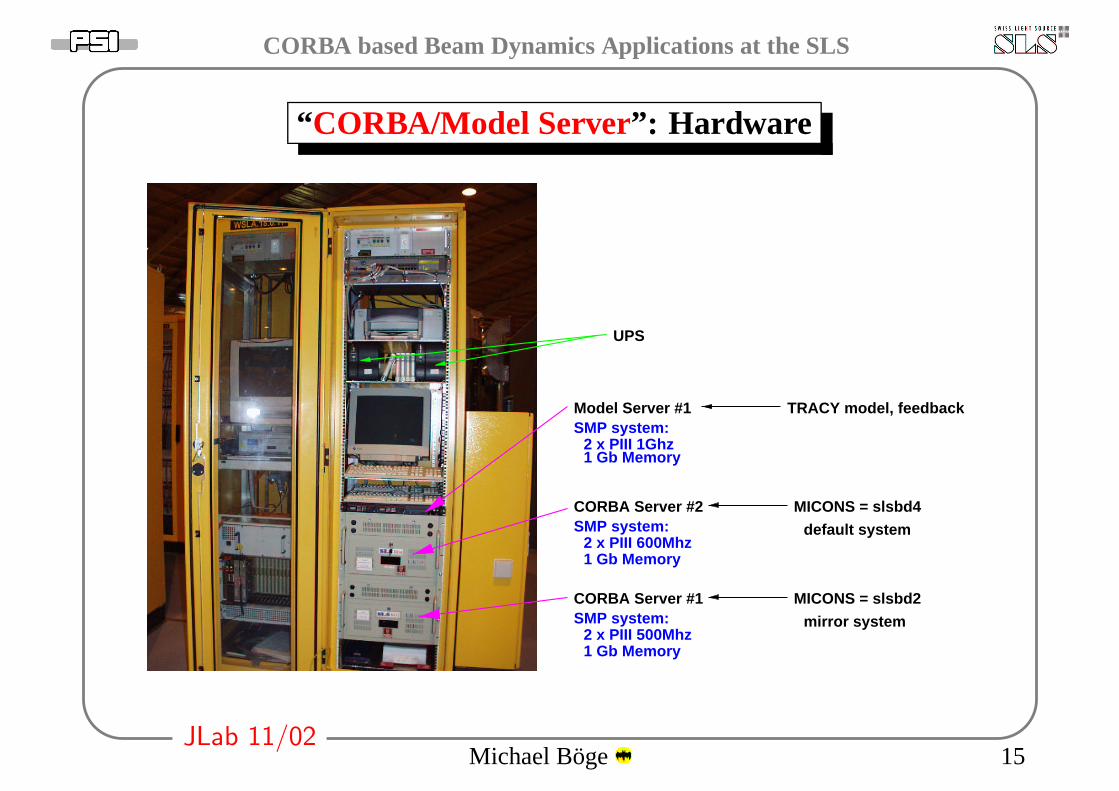
“CORBA/Model Server”: Hardware
MICONS = slsbd4
SMP system:
1 Gb Memory2 x PIII 500Mhz
SMP system:2 x PIII 600Mhz1 Gb Memory
MICONS = slsbd2
default system
mirror system
UPS
SMP system:
1 Gb Memory2 x PIII 1Ghz
CORBA Server #1
TRACY model, feedback
CORBA Server #2
Model Server #1
Michael Boge 15

CORBA based Beam Dynamics Applications at the SLS
JLab 11/02
“CORBA/Model Server”: Integration Control System
PSS060File#Server
ALIRF-VME-MOD
ALIVA-VME
ALIMA-VME-B
ALBVA-VME
ALIDI-VME-OP
ALIDI-VME-CUR
ALIRF-VME-AS
ALIRF-VME-GUN
VAXConsole
Knob#BoxConsole
PC2040Console/Boot
PC2074Console/Boot
switch
switch switch switch switchswitch
GPIB
GPIB
GPIB
PSI#Network
SLS#Network
PSI#Network
LinBootIOCConsole/Boot
PC2573SLSOP
PC2766(Windows#NT)
ALIMA-VME-A
SLS Linac Networkdate: 28. Mar ch 00
timing
ALIRF-VME-A
PC2292time#svr,#license
svr,#sw#dist.
PC2829file#server
PC2506Archiver
Lin
ac#C
onso
leC
ontr
ol#R
oom
PC2764development
PC2822development
PC2823development
PC2757development
PC2765development
PC2654Console
PC2759Console
PC2760Console
PC2569Console
CDEV ServerAnalysis ServerTRACY ServerMessage ServerDatabase Server
GUIs
IIOP
SLSBD2Model Server
T. Schilcher
Model Server
Consoles
Michael Boge 16

CORBA based Beam Dynamics Applications at the SLS
JLab 11/02
Orbit Display: Schematics of Data Flow
DI-12
DI-11
DI-10
DI-9
DI-8
DI-7 DI-6
DI-5
DI-4
DI-3
DI-2
DI-1A
DI-1B
channel access
Client Console
BOOSTER
LINAC
Tcl/Tk Client Java Client
Cdev Server
waveform index
waveform4096 values
subarray 64 values
SharedMemory
does peak searchcalculates average,
Push ConsumerPush Consumer
SharedMemory
1B 1A
4
3
2
58
9
slsbd4: "Model Server"
12
10
7
11
6
Event Channel
Data Analysis
Push Supplier
Analysis Server
push() push()
push()
poll()
Michael Boge 17

CORBA based Beam Dynamics Applications at the SLS
JLab 11/02
Orbit Display: Visualization from Tcl/Tk/CORBA Client
Model tuneMean and rms value
Horizontal orbit versus phase
Vertical orbit versus phase
Michael Boge 18

CORBA based Beam Dynamics Applications at the SLS
JLab 11/02
Orbit Correction: Tcl/Tk/CORBA Client
oco main panel
Load/Save snapshots
Message logger
Info/Debugmessages
Error Messages
OrbitCorrection
Bumps
Michael Boge 19
CORBA based Beam Dynamics Applications at the SLS
JLab 11/02
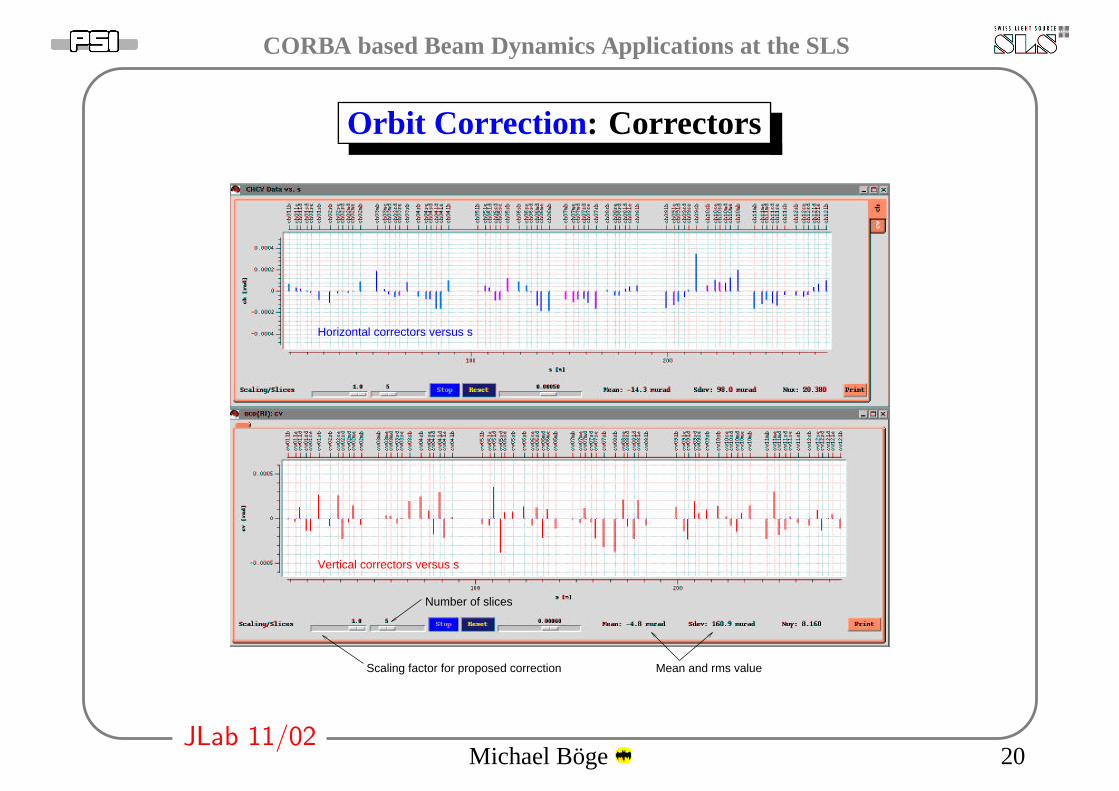
Orbit Correction: Correctors
Vertical correctors versus s
Horizontal correctors versus s
Mean and rms valueScaling factor for proposed correction
Number of slices
Michael Boge 20
CORBA based Beam Dynamics Applications at the SLS
JLab 11/02
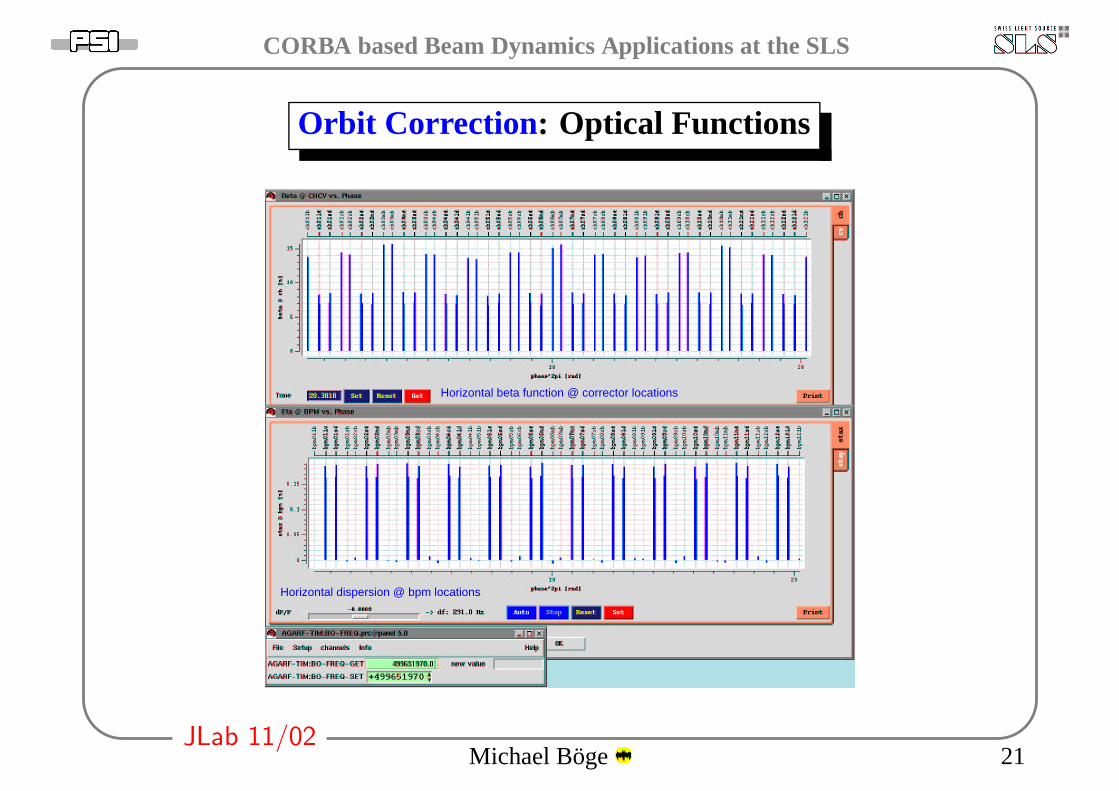
Orbit Correction: Optical Functions
Horizontal beta function @ corrector locations
Horizontal dispersion @ bpm locations
Michael Boge 21
CORBA based Beam Dynamics Applications at the SLS
JLab 11/02
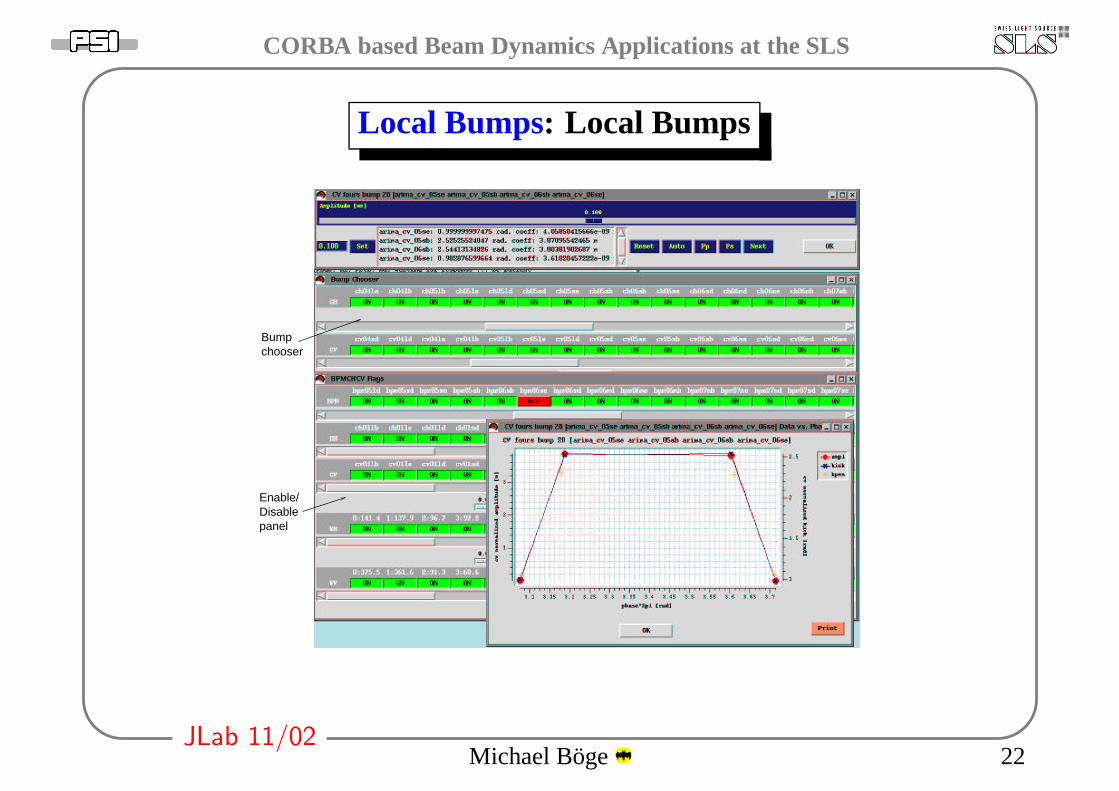
Local Bumps: Local Bumps
Enable/Disablepanel
Bumpchooser
Michael Boge 22

CORBA based Beam Dynamics Applications at the SLS
JLab 11/02
Local Bumps: Monitor Calibration in the Booster
Measurement based on sum signal
from the model.The "bump height" is calculated
Interlaced 3bumps (bump number 0-53)are scanned til the sum signal is zero (colour code)
abodi_bpm_1s
of BPM "abodi_bpm_1s"
Michael Boge 23

CORBA based Beam Dynamics Applications at the SLS
JLab 11/02
Tune Measurement: Java/CORBA Client
Chromaticitymeasurement
Horizontal BPM turn by turn data4096 turns
Vertical BPM turn by turn data4096 turns
FFT
update rate 2Hz
after correction with skew quads
Design tune nux=20.38, nuy=8.16 Tune data are written to EPICS soft channels
Closest tune approach dQ=0.001
Michael Boge 24

CORBA based Beam Dynamics Applications at the SLS
JLab 11/02
Lifetime: Java/CORBA Client
9 ms
Lifetime from dPCT
Slow mode averaging over 1.5 minFast mode averaging over 10 sec
23.5 h lifetime @ 145 mA 8 h @ design current of 400 mA (with 3HC)
Michael Boge 25

CORBA based Beam Dynamics Applications at the SLS
JLab 11/02
Phase Space Display: Tcl/Tk/C++/CORBA Client
CPU intensive client part implemented
objectin C++ and linked @ runtime as shared
X and Y’ are calculated from thereadings of two adjacent bpmsbased on model data
XX’ plot YY’ plot
4080 single turnbpm readings
update rate 3 Hz
selectorBPM
Michael Boge 26

CORBA based Beam Dynamics Applications at the SLS
JLab 11/02
Transferline Twiss Parameters: Tcl/Tk/CORBA Client
Michael Boge 27
CORBA based Beam Dynamics Applications at the SLS
JLab 11/02
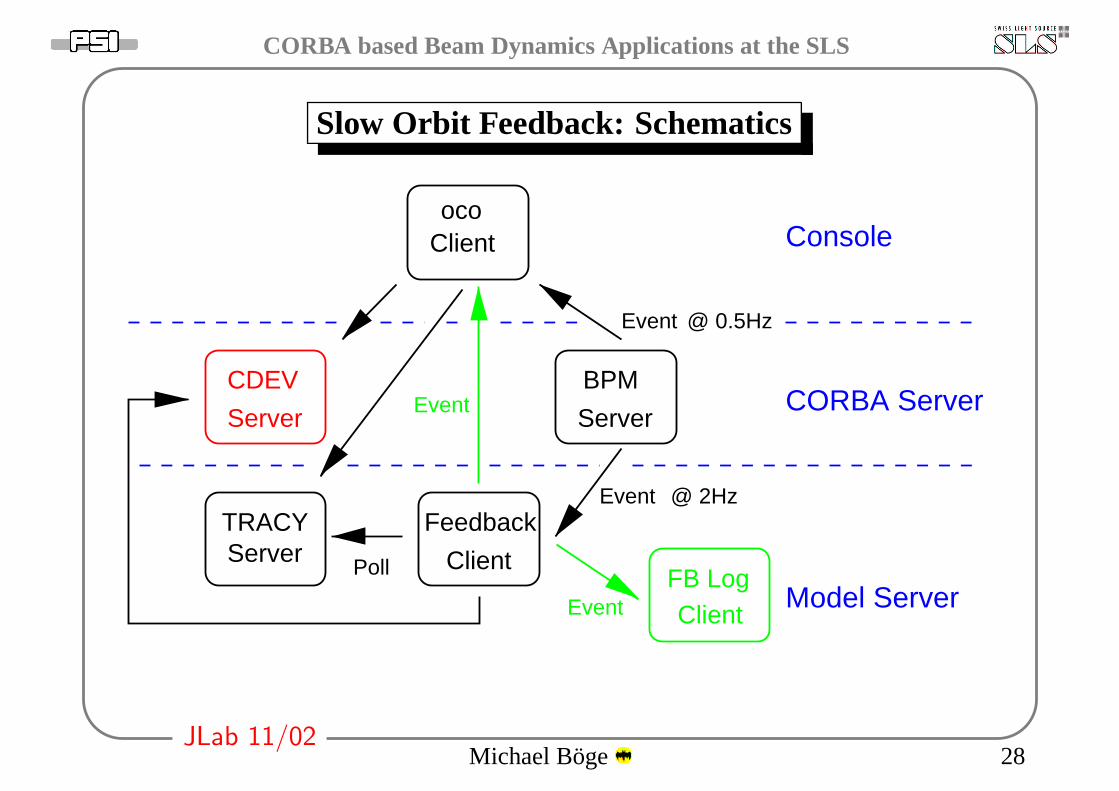
Slow Orbit Feedback: Schematics
Client
Feedback
oco
BPM
Server
TRACYServer
Client
Event
Event @ 0.5Hz
@ 2Hz
Poll FB LogClient
Server
CDEVEvent
Event
Console
CORBA Server
Model Server
Michael Boge 28

CORBA based Beam Dynamics Applications at the SLS
JLab 11/02
Slow Orbit Feedback: Results
320 mA top−up
x RMS orbit
y RMS orbit
x RMS kick
y RMS kick
y difference orbit
dP/P ~ 1.e−5
2 Hz orbit samplingrateAverage over 3samplesAlternating x/ycorrection75% of estimatedcorrector strengthapplied
Michael Boge 29

CORBA based Beam Dynamics Applications at the SLS
JLab 11/02
Slow Orbit Feedback: Results (cont.)
• Sample run Aug, 13-16 2002: xrms, yrms ≈ 1 µm (see histograms)
• RF frequency corrected by df whenever |df| exceeds 5 Hz(dE/E ≈ 2 · 10−5) correction every ≈ 45 min (see “saw tooth”)
Michael Boge 30

CORBA based Beam Dynamics Applications at the SLS
JLab 11/02
Slow Orbit Feedback: Results (cont.)
• Outside air temperature andRF frequency changes –>
• X-BPM @ PX≈ 9 m from ID U24:σx = 2.7 µm (drift: 2.3 µm)σy = 1.5 µm (drift: 1.7 µm)
Michael Boge 31

CORBA based Beam Dynamics Applications at the SLS
JLab 11/02
Summary
• All applications needed for commissioning and operation provided
• CORBA framework reliable and flexible
• Accelerator Model well integrated into the Control System
• New Applications profit from modularity of the architecture(–> Slow/Fast Orbit Feedback)
Michael Boge 32

















