JEDNADžBE KOMPATIBILNOSTI-MATRIčNI ISPIS •ZADATAK: Odrediti nepoznanice-prekobrojne veličine i dijagrame M. Zadatak riješiti metodom sila. Jednadžbe kompatibilnosti postaviti matrično. Koeficijente fleksibilnosti odrediti u Robotu. Materijal:drvo; b/h=20/40 cm (geometry/sections/new sections) + *
Transcript
JEDNADžBE KOMPATIBILNOSTI-MATRIčNI ISPIS
•ZADATAK:
Odrediti nepoznanice-prekobrojne veličine i dijagrame M.
Zadatak riješiti metodom sila. Jednadžbe kompatibilnosti postaviti matrično.
Koeficijente fleksibilnosti odrediti u Robotu.
Materijal:drvo; b/h=20/40 cm (geometry/sections/new sections)
+*
SUPERPOZICIJA U METODI SILA
KONCEPT METODE SILA
•određivanje stupnja statičke neodređenosti n
•odabir prekobrojnih veličina X1,X2....Xn (ima ih koliko je statički
neodređen sistem), odnosno osnovnog sustava
•ispis jednadžbi kompatibilnosti (podudarnost pomaka osnovnog i
zadanog sustava na mjestu raskinute veze); koristi se princip
superpozicije u osnovnom sustavu, zbrajaju se pomaci od zadanog
opterećenja i prekobrojnih veličina
•izražavanje jednadžbi koristeći princip fleksibilnosti
•rješavanje jednadžbi → određivanje nepoznanica-to su prekobrojne
sile
•određivanje odgovora svih sila (zbrajanjem rješenja na osnovnom
sistemu od zadanog opterećenja i prekobrojnih sila/// ili iz jednadžbi
ravnoteže)
( ) ( )( )
( ) P*fPu
ostifleksibilntkoeficijen1Pu/fδ
P*1PuPu
ij
ijij
=
⇒==
==
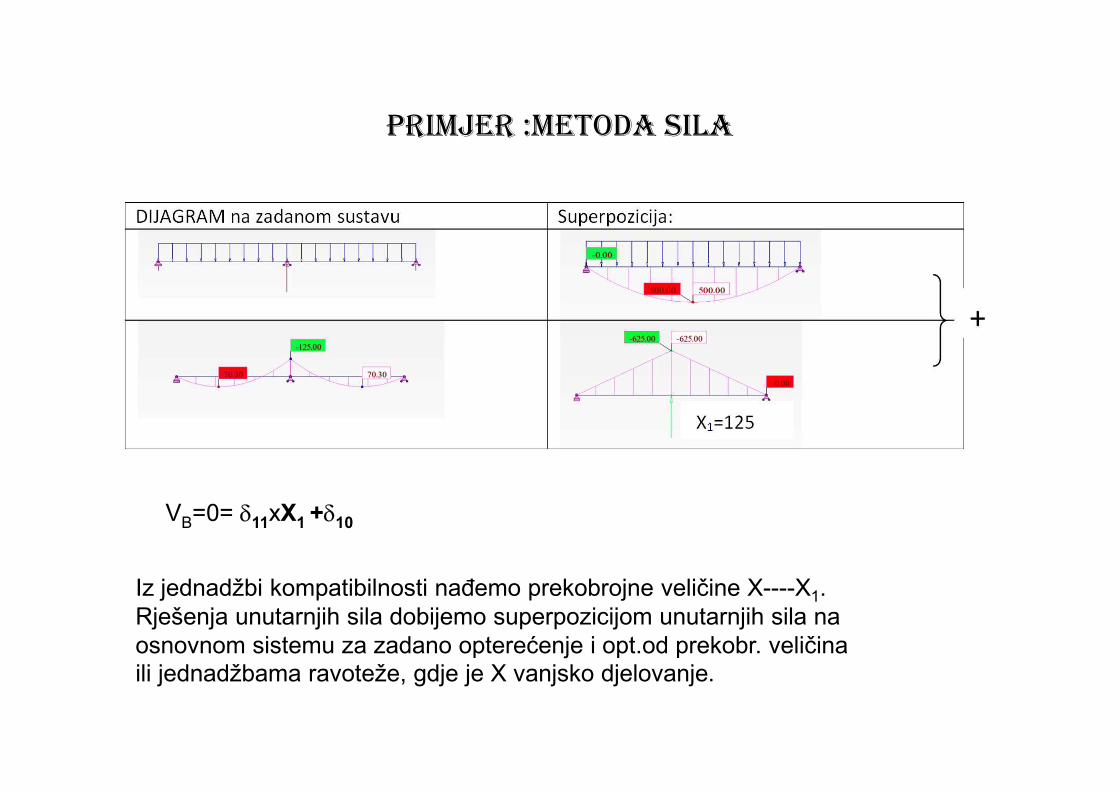
PRIMJER :METODA SILA
•određivanje stupnja statičke neodređenosti n
•odabir prekobrojnih veličina X1,X2....Xn (ima ih koliko je neodređen
sistem), odnosno osnovnog sustava-na njemu radim proračun
•koristi se princip superpozicije u osnovnom sustavu, zbrajaju se utjecaji
od zadanog opterećenja i prekobrojnih veličina
PRIMJER :METODA SILA
•ispis jednadžbi kompatibilnosti (podudarnost pomaka osnovnog i
zadanog sustava na mjestu raskinutih veza progib u B zadanog SNS
sistema i zamjenskog je isti). Koristi se princip superpozicije u osnovnom
sustavu, zbrajaju se pomaci od zadanog opterećenja i prekobrojnih
veličina
•Jednadžba kompatibilnosti
VB=0= δ11xX1 +δ10
Iz te jedn. dobijemo prekobrojnu veličinu X1.
PRIMJER :METODA SILA
Pri računanju pomaka od prekobrojnih sila-nepoznanica,
koristi se princip fleksibilnosti//met.jedin.opter.:
( ) ( )( )
( ) P*fPu
ostifleksibilntkoeficijen1Pu/fδ
P*1PuPu
ij
ijij
=
⇒==
==
PRIMJER :METODA SILA
Iz jednadžbi kompatibilnosti nađemo prekobrojne veličine X----X1.
Rješenja unutarnjih sila dobijemo superpozicijom unutarnjih sila na
osnovnom sistemu za zadano opterećenje i opt.od prekobr. veličina
ili jednadžbama ravoteže, gdje je X vanjsko djelovanje.
VB=0= δ11xX1 +δ10
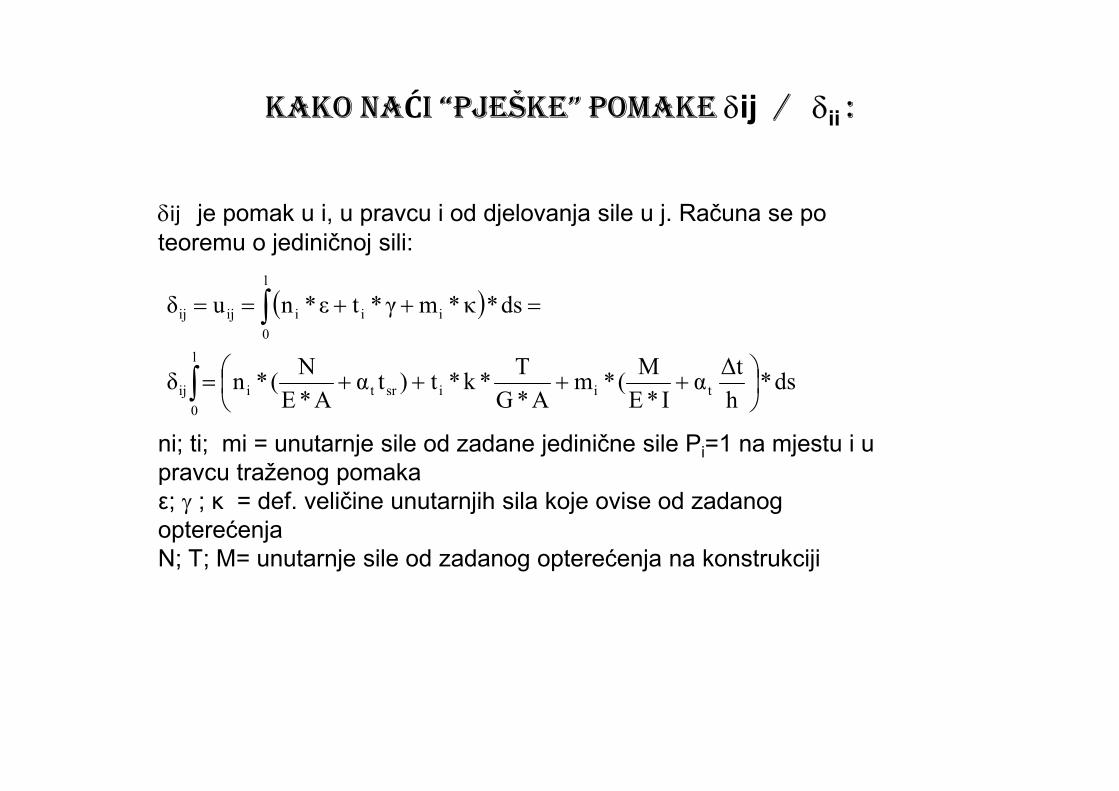
KAKO NAĆI “PJEŠKE” POMAKE δij / δii :
δij je pomak u i, u pravcu i od djelovanja sile u j. Računa se po
teoremu o jediničnoj sili:
ni; ti; mi = unutarnje sile od zadane jedinične sile Pi=1 na mjestu i u
pravcu traženog pomaka
ε; γ ; κ = def. veličine unutarnjih sila koje ovise od zadanog
opterećenja
N; T; M= unutarnje sile od zadanog opterećenja na konstrukciji
( )
ds*h
Δtα
I*E
M(*m
A*G
T*k*t)tα
A*E
N(*nδ
ds*κ*mγ*tε*nuδ
l
0
tiisrtiij
l
0
iiiijij
∫
∫
++++=
=++==
KAKO NAĆI “PJEŠKE” POMAKE δij / δii :
Pošto imamo 1 prekobrojnu silu X1 računati ćemo pomake na
mjestu iste, odnosno koeficijente fleksibilnosti (pomake od jed. sila)
δ11 i δ10-za vanjsko opterećenje.
Moramo znati M i m dijagrame.
JEDNADžBE KOMPATIBILNOSTI-NAčIN ISPISA
Jednadžbe kompatibilnosti :
implicitni oblik:
∆1=0 (VB=0)
eksplicitni oblik:
δ11xX1 +δ10=0
Za sustave sa više prekobrojnih veličina to je niz jednadžbi:
� ��,��
� =1∗ � + ��,0 = 0 � = 1, … . , �
Matrični ekspl. oblik tih jednadžbi:
+*D-Matrica popustljivosti ili matrica
fleksibilnosti
Δ-vektor vanjskih sila
X-vektor nepoznatih sila
JEDNADžBE KOMPATIBILNOSTI-MATRIčNI ISPIS
•ZADATAK:
Odrediti nepoznanice-prekobrojne veličine i dijagrame M.
Zadatak riješiti metodom sila. Jednadžbe kompatibilnosti postaviti matrično.
Koeficijente fleksibilnosti odrediti u Robotu.
Materijal:drvo; b/h=20/40 cm (geometry/sections/new sections)
OSNOVNI SISTEM+SUPERPOZICIJA
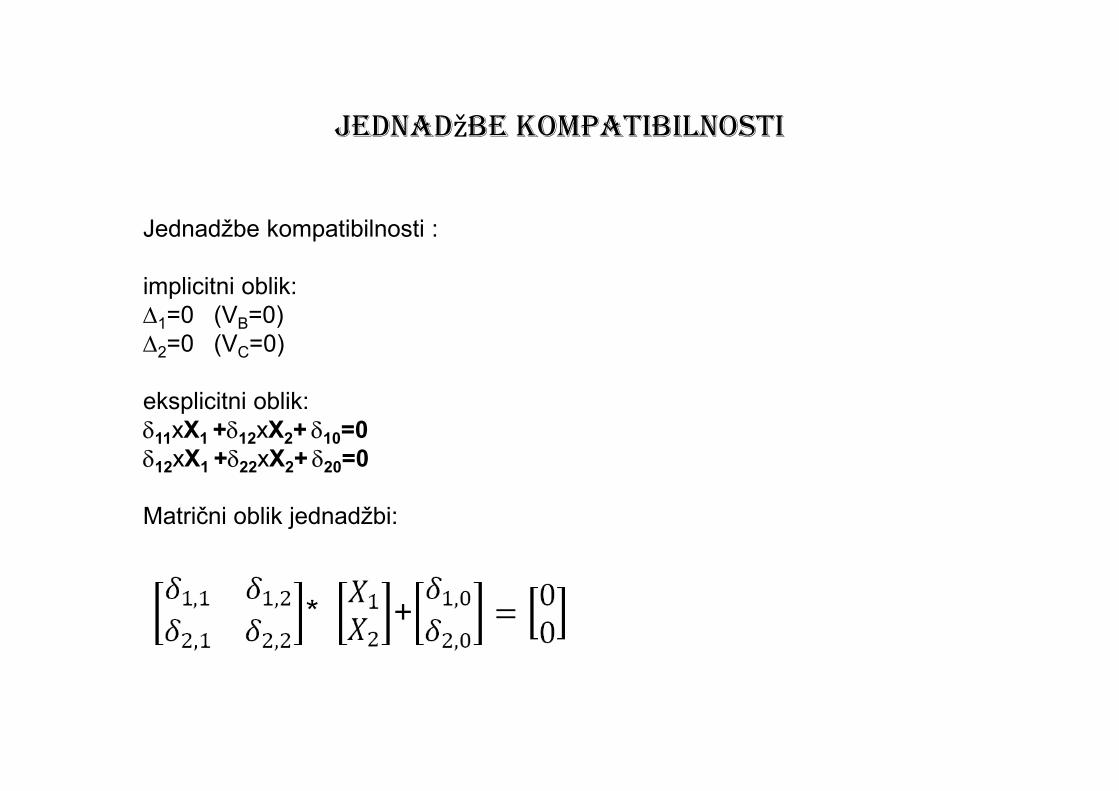
JEDNADžBE KOMPATIBILNOSTI
Jednadžbe kompatibilnosti :
implicitni oblik:
∆1=0 (VB=0)
∆2=0 (VC=0)
eksplicitni oblik:
δ11xX1 +δ12xX2+ δ10=0
δ12xX1 +δ22xX2+ δ20=0
Matrični oblik jednadžbi:
JEDNADžBE KOMPATIBILNOSTI
Da bi odredili koeficijente fleksibilnosti:
Moramo naći dijagrame pomaka za opterećenje
X1=1; X2=1
na zamjenskom sustavu. Iz istog očitamo pomake na mjestu
raskinutih veza-koji su koeficijenti fleksibilnosti.
Da bi odredili koeficijente fleksibilnosti za vanjsko djelovanje
Moramo naći dijagrame pomaka za vanjsko, zadano
opterećenje na zamjenskom sustavu.
Iz istog očitamo pomake na mjestu raskinutih veza-koji su
koeficijenti fleksibilnosti za vanjsko djelovanje.
















![Matri Vani vol. 1 Ma...MATRI&VANI!! VOLUMEI’!! [!Translated!by!ATMANANDA]!!! Withaforeword!! by! MAHAMAHOPADHYAYA! SRI!GOPINATH!KAVIRAJ!! Padma!Visbhushana,!M.A.,!D.Litt.!](https://static.documents.pub/doc/80x56/5e1a1fdffa9b30521624c3c6/matri-vani-vol-1-mamatrivani-volumeia-translatedbyatmananda.jpg)













