Kolmogorov-Chaitin Complexity of Linear Digital Controllers Implemented using Fixed-point Arithmetic James F. Whidborne * , John Mckernan * , Da-Wei Gu † [email protected]†Department of Engineering, University of Leicester ∗Department of Aerospace Sciences, Cranfield University Kolmogorov-Chaitin Complexity of Linear Digital Controllers Implemented using Fixed-point Arithmetic – p. 1/24
Transcript
Kolmogorov-Chaitin Complexity of Linear DigitalControllers Implemented using Fixed-point Arithmetic
†Department of Engineering, University of Leicester
∗Department of Aerospace Sciences, Cranfield University
Kolmogorov-Chaitin Complexity of Linear Digital Controllers Implemented using Fixed-point Arithmetic – p. 1/24
Introduction
• Modern control design methods may give high-order digital controllers— regarded as complex, thus costly & difficult to implement
• Rounding errors occur in digital controller implementations — magnifiedwith controller order — often solved using costlier longer word-length orfloating point processors
• Hence control system designers motivated to produce low-ordercontrollers
Kolmogorov-Chaitin Complexity of Linear Digital Controllers Implemented using Fixed-point Arithmetic – p. 2/24
Introduction
• Modern control design methods may give high-order digital controllers— regarded as complex, thus costly & difficult to implement
• Rounding errors occur in digital controller implementations — magnifiedwith controller order — often solved using costlier longer word-length orfloating point processors
• Hence control system designers motivated to produce low-ordercontrollers
But do low-order controllers have lower complexity?
Kolmogorov-Chaitin Complexity of Linear Digital Controllers Implemented using Fixed-point Arithmetic – p. 2/24
Introduction
For example consider : K1(z) =1
(z + 1)3and K2(z) =
1
z + 0.1
• controller K1 has order 3 & controller K2 has order 1
• normal assumption: K2 has lower complexity than K1
Kolmogorov-Chaitin Complexity of Linear Digital Controllers Implemented using Fixed-point Arithmetic – p. 3/24
Introduction
For example consider : K1(z) =1
(z + 1)3and K2(z) =
1
z + 0.1
• controller K1 has order 3 & controller K2 has order 1
• normal assumption: K2 has lower complexity than K1
BUT• K1 requires 0 multiplication operations & can be implemented exactly• K2 requires 1 multiplication operation & cannot be implemented exactly!
(0.1 in base-2 is 0.000110011 · · · recurring — hence cannot berepresented exactly by binary computer with finite wordlength)
• hence K2 has a higher complexity than K1
Kolmogorov-Chaitin Complexity of Linear Digital Controllers Implemented using Fixed-point Arithmetic – p. 3/24
Introduction
For example consider : K1(z) =1
(z + 1)3and K2(z) =
1
z + 0.1
• controller K1 has order 3 & controller K2 has order 1
• normal assumption: K2 has lower complexity than K1
BUT• K1 requires 0 multiplication operations & can be implemented exactly• K2 requires 1 multiplication operation & cannot be implemented exactly!
(0.1 in base-2 is 0.000110011 · · · recurring — hence cannot berepresented exactly by binary computer with finite wordlength)
• hence K2 has a higher complexity than K1
Controller order is only an indicator of controller complexity!
Required word-length and the arithmetic operations are other factors thatdetermine controller complexity
Kolmogorov-Chaitin Complexity of Linear Digital Controllers Implemented using Fixed-point Arithmetic – p. 3/24
Introduction
• To measure complexity accurately, we use the idea ofKolmogorov-Chaitin complexity: the complexity of a computable object ismeasured by the length, in bits, of the shortest program that computesthe object
• We consider the complexity of linear, fixed-point arithmetic, digitalcontrollers from a Kolmogorov-Chaitin perspective
• The complexity of designs for the restricted complexity controllerbenchmark problem are investigated
• It will be seen that, from a Kolmogorov-Chaitin viewpoint, higher-ordercontrollers with a shorter word-length may have a lower complexity but abetter performance than lower-order controllers with longer word-length
Kolmogorov-Chaitin Complexity of Linear Digital Controllers Implemented using Fixed-point Arithmetic – p. 4/24
Kolmogorov-Chaitin complexity
• Measures the complexity of a computable object by the length, in bits, ofthe shortest program that computes the object.
Definition 1. The Kolmogorov complexity ΓU (x) of a computable finite-length binarystring, x, with respect to a universal Turing machine U is defined as
ΓU (x) = minp:U(p)=x
ℓ(p)
where p denotes a program interpreted by U and ℓ(p) denotes the description length ofp.
Kolmogorov-Chaitin Complexity of Linear Digital Controllers Implemented using Fixed-point Arithmetic – p. 5/24
Kolmogorov-Chaitin complexity
• Measures the complexity of a computable object by the length, in bits, ofthe shortest program that computes the object.
Definition 1. The Kolmogorov complexity ΓU (x) of a computable finite-length binarystring, x, with respect to a universal Turing machine U is defined as
ΓU (x) = minp:U(p)=x
ℓ(p)
where p denotes a program interpreted by U and ℓ(p) denotes the description length ofp.
• Digital controllers are not implemented on universal Turing machines —the following well-known theorem relates Kolmogorov complexity to thelength complexity using some other computing machine
Theorem 1. If U is a universal computer, then for any other computer A,
ΓU (x) ≤ ΓA(x) + cA
for all binary strings x where the constant cA does not depend on x.
Kolmogorov-Chaitin Complexity of Linear Digital Controllers Implemented using Fixed-point Arithmetic – p. 5/24
Kolmogorov-Chaitin complexity
• For a digital controller, at each sample period, the digital computercalculates a binary string u(v) (the control) which is dependent onanother binary string v (concatenation of measurement and someprevious sample period controller states)
• Actually need complexity of controller implementation for all possiblemeasurements & controller states and hence of all controls
• Controller maps V(the set of all possible v) to U(the set of all possible u)• A practical complexity measure is (minimum length of the stored
program for all possible v) + (maximum length of v) — gives a measureof the total storage requirements for the program, the input data and thestored data
Definition 2. The complexity Γ of a controller implementation with respect to a controllerimplementation machine K is defined as
Γ = max{ℓ(v) : v ∈ V} + min{ℓ(p) : K(p) = u(v), for all v ∈ V}
where p denotes program interpreted by K and ℓ(p) is length, in bits, of p
Kolmogorov-Chaitin Complexity of Linear Digital Controllers Implemented using Fixed-point Arithmetic – p. 6/24
Complexity of state-space realizations
State space representation Ks = (A, B, C, D), with n states, p inputs and qoutputs, where at the ith time step
x(i + 1) = Ax(i) + By(i), u(i) = Cx(i) + Dy(i)
Let k be the concatenated binary string of the parameters of Ks
• If the chosen word-length is w, then the length of k is given byℓ(k) = (n + p)(n + q)w and the length of v is given by ℓ(v) = (n + p)wand thus the required data storage of Ks is ℓ(k) + ℓ(v)
• This is not a satisfactory complexity measure, because it does notconsider the possibility of sparse realizations, where some of thecontroller parameters are zero or unity
• No multiplication or addition operation if a controller parameter is zero• No multiplication operation if a controller parameter is unity
Hence need to measure complexity using Definition 2 (i.e. measure programlength, not data storage)
Kolmogorov-Chaitin Complexity of Linear Digital Controllers Implemented using Fixed-point Arithmetic – p. 7/24
Evaluating complexity of LTI controllers
Definition 2 complexity of a linear time-invariant controller easily evaluated:• v has constant length• program is independent of u, y and x
• hence program length ℓ(p) is independent of v and u
Length of the program ℓ(p) also depends on implementation machine K i.e. isthere hardware support for floating point calculations, multiplicationoperations etc? If so, what length “overhead” is given for the use of morecomplex operations over simpler operations such as addition or barrel shift?
• Simple computing devices preferred for reasons of cost and reliability• In this paper, assume device has fixed point arithmetic and multiplication
is by sequence of additions and barrel shifts (i.e. one addition + one shiftper unity bit of the constant multiplicand)
Kolmogorov-Chaitin Complexity of Linear Digital Controllers Implemented using Fixed-point Arithmetic – p. 8/24
Complexity of state-space realizations
Thus the following complexity measure is proposed:Definition 3. The controller complexity Γ(Ks) of a state space controller realization
Ks = (A, B, C, D) is given by
Γ(Ks) = ℓ(v) +
ℓ(k)∑
i=1
ki
where the concatenated binary string of the parameters of Ks is given byk = [k1, k2, . . . , kℓ(k)], ki ∈ {0, 1}.
This gives a measure of the length of program in terms of number ofoperations and data storage requirements
Kolmogorov-Chaitin Complexity of Linear Digital Controllers Implemented using Fixed-point Arithmetic – p. 9/24
Other controller realizations
State space realization is over-parameterized, in that there are a largenumber of degrees of freedom in the choice of the (A, B, C, D) termsOther common realizations are:
• Parallel and the cascade forms — considered here• The direct form (obtained directly from the difference equation) is
numerically unreliable for medium and high-order controllers — hencenot considered here
• Open-loop stability of the lattice form can be determined by inspection— advantageous in pre-MATLAB era — hence not considered here
Kolmogorov-Chaitin Complexity of Linear Digital Controllers Implemented using Fixed-point Arithmetic – p. 10/24
Complexity of parallel and cascade realizations
Parallel and cascade realizations decompose controller into first andsecond-order direct-form filter blocks:
F (z) =a0 + a1z
−1
1 + b1z−1and F (z) =
a0 + a1z−1 + a2z
−2
1 + b1z−1 + b2z−2
• The parallel structure used here is (for SISO controllers)
Kp(z) =
m∑
i=1
Fi(z)
where each Fi is a first or second order transfer function• The cascade structure is given by
Kc(z) =
m∏
i=1
Fi(z)
Kolmogorov-Chaitin Complexity of Linear Digital Controllers Implemented using Fixed-point Arithmetic – p. 11/24
Complexity of cascade realization
• Assume m filter blocks — all second order• c is the concatenated binary string representation of all filter block
parameters a0, a1, a2, b1, b2
• Length of c is thus ℓ(c) = 5mw where w is the word-length
• Each filter block requires two previous outputs and two previous inputsto be stored, but two previous outputs of each block (except the last) areequal to the two previous inputs of the next block
• Hence length of v is given by ℓ(v) = (2m + 3)w (measurement must alsobe stored)
Definition 4. The controller complexity Γ(Kc) of a cascade controller realization Kc is givenby
Γ(Kc) = ℓ(v) +
ℓ(c)∑
i=1
ci
where c = [c1, c2, . . . , cℓ(c)], ci ∈ {0, 1}.
Kolmogorov-Chaitin Complexity of Linear Digital Controllers Implemented using Fixed-point Arithmetic – p. 12/24
Restricted complexity controller benchmark
• Plant is a hydro-suspension system subjected to a disturbance• Objective is to design the simplest controller that meets some control
specifications
K G- - - -?u y
Gp
+
+
?up
p
• The objective of the control is to reduce the residual force, y, at the firstand second vibration modes of the primary plant, Gp
• The residual force y is measured and fed back to the secondary plant viaa digital controller, K
• Controller gain should be zero at Fs/2, which is achieved by ensuringthe controller includes the term (z−1 + 1)
Kolmogorov-Chaitin Complexity of Linear Digital Controllers Implemented using Fixed-point Arithmetic – p. 13/24
Restricted complexity controller benchmark
Control specifications are
• output sensitivity function Syp = (1 + KG)−1 constrained in frequencydomain by function Fyp(ω)
• input sensitivity function Sup = −K(1 + KG)−1 constrained in frequencydomain by function Fup(ω)
Kolmogorov-Chaitin Complexity of Linear Digital Controllers Implemented using Fixed-point Arithmetic – p. 14/24
Restricted complexity controller benchmark
Control specifications are
• output sensitivity function Syp = (1 + KG)−1 constrained in frequencydomain by function Fyp(ω)
• input sensitivity function Sup = −K(1 + KG)−1 constrained in frequencydomain by function Fup(ω)
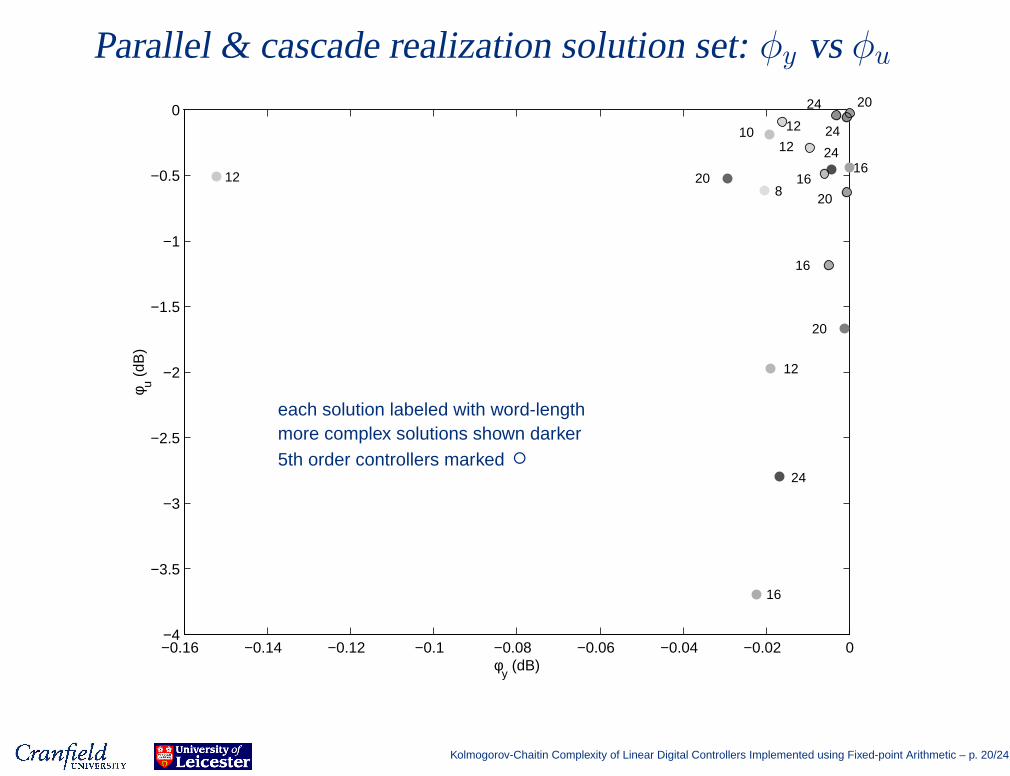
Two performance measures are thus defined as
φy = maxω∈[0,ωs/2]
(Syp(ω) − Fyp(ω))
φu = maxω∈[0,ωs/2]
(Sup(ω) − Fup(ω))
where ωs = is sampling frequency
Kolmogorov-Chaitin Complexity of Linear Digital Controllers Implemented using Fixed-point Arithmetic – p. 14/24
State-space realization controllers
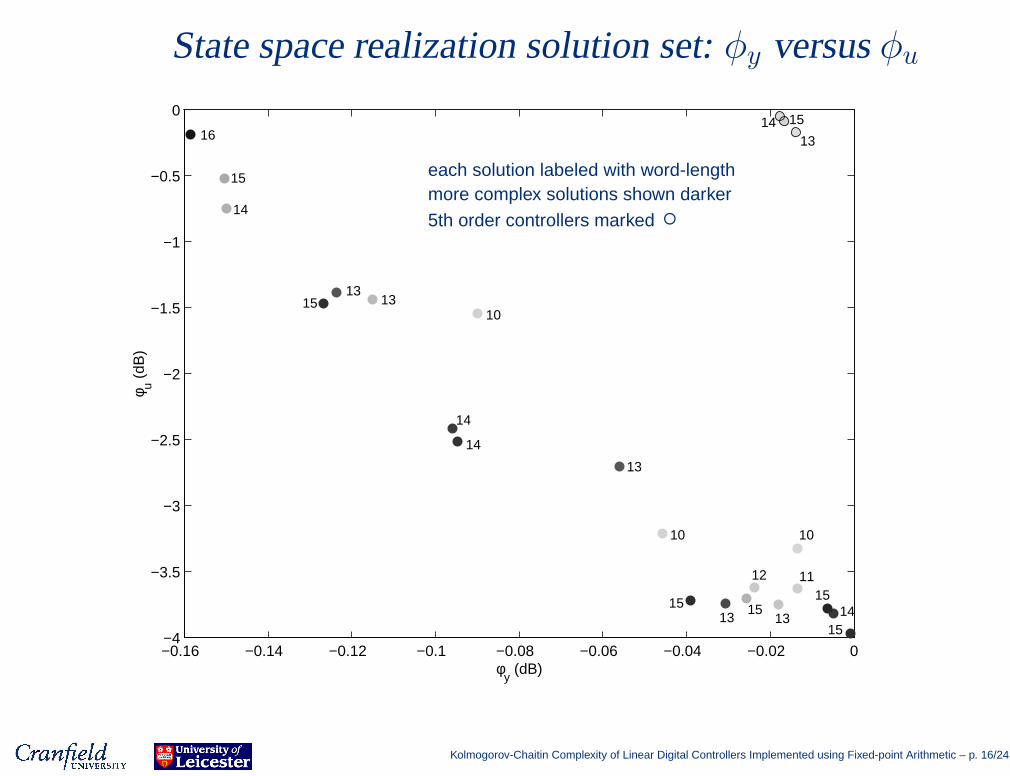
• A set of non-dominated state-space realization controllers that satisfycriteria
φy(Ks) < 0 and φu(Ks) < 0
obtained using Fonseca and Fleming’s multi-objective genetic algorithm• All controllers either 7th order or 5th order with complexity Γ
• We will see that the superiority of the performance of the higher ordercontrollers is clear
• The lower complexity of the lower order controllers is less clear
Kolmogorov-Chaitin Complexity of Linear Digital Controllers Implemented using Fixed-point Arithmetic – p. 15/24
State space realization solution set: φy versus φu
Kolmogorov-Chaitin Complexity of Linear Digital Controllers Implemented using Fixed-point Arithmetic – p. 21/24
Parallel & cascade realization solution set: φu vs Γ
−4 −3.5 −3 −2.5 −2 −1.5 −1 −0.5 0100
150
200
250
300
350
400
φu (dB)
Γ5th order controllers marked ⊙
Kolmogorov-Chaitin Complexity of Linear Digital Controllers Implemented using Fixed-point Arithmetic – p. 22/24
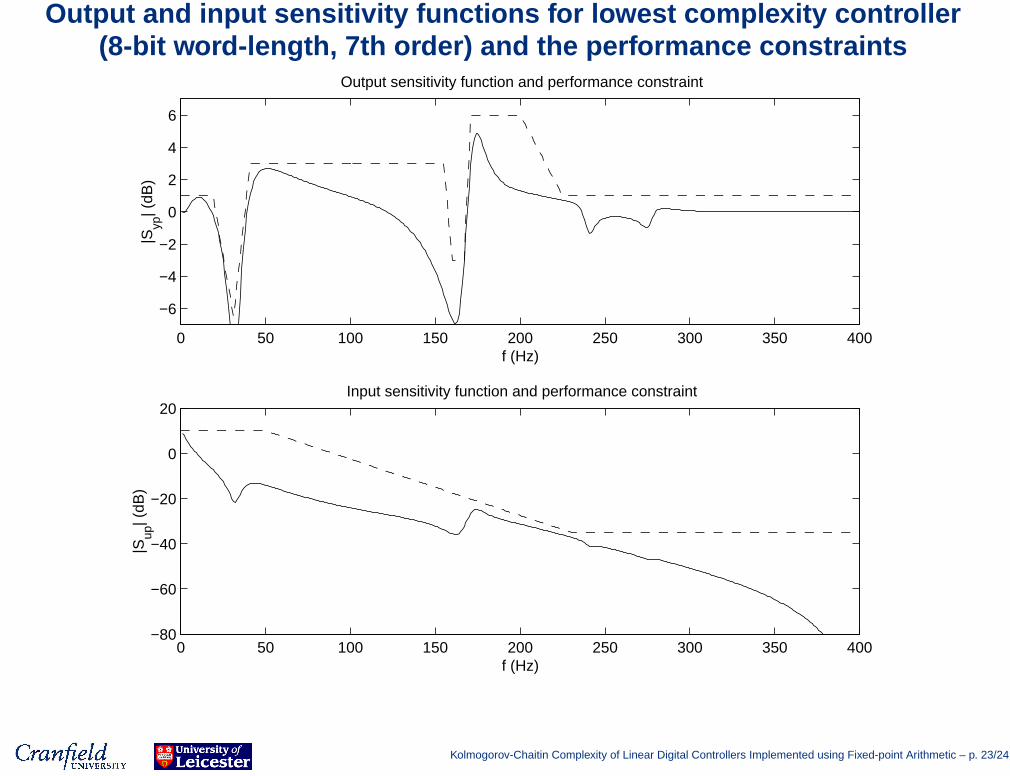
Output and input sensitivity functions for lowest complexity controller(8-bit word-length, 7th order) and the performance constraints
0 50 100 150 200 250 300 350 400
−6
−4
−2
0
2
4
6
f (Hz)
|Syp
| (dB
)
Output sensitivity function and performance constraint
0 50 100 150 200 250 300 350 400−80
−60
−40
−20
0
20
f (Hz)
|Sup
| (dB
)
Input sensitivity function and performance constraint
Kolmogorov-Chaitin Complexity of Linear Digital Controllers Implemented using Fixed-point Arithmetic – p. 23/24
Conclusions
• We consider controller complexity based on idea of Kolmogorov-Chaitincomplexity
• Practical measures of complexity developed for state-space, parallel andcascade realizations
• Controllers that are low-complexity in this sense will have lowword-length, low number of arithmetic operations and simple realizations— the most important considerations for practical implementations(especially for field-programmable gate arrays)
• Measure is related to the controller order but the lowest complexitycontroller is not necessarily the lowest order
• Higher-order controllers provide an extra degrees of freedom to helpobtain controller realizations that have a shorter word-length and simplerrealization structure, and thus a lower complexity
Kolmogorov-Chaitin Complexity of Linear Digital Controllers Implemented using Fixed-point Arithmetic – p. 24/24