Page 1
-otl
aA
DD
3
32
/ 6
102
+ajbbh
a*GMFTSH
9 NBSI 0-9117-06-259-879 )detnirp( NBSI 3-8117-06-259-879 )fdp(
L-NSSI 4394-9971 NSSI 4394-9971 )detnirp( NSSI 2494-9971 )fdp(
ytisrevinU otlaA
gnireenignE lacirtcelE fo loohcS scitsuocA dna gnissecorP langiS fo tnemtrapeD
if.otlaa.www
+ SSENISUB YMONOCE
+ TRA
+ NGISED ERUTCETIHCRA
+ ECNEICS
YGOLONHCET
REVOSSORC
LAROTCOD SNOITATRESSID
reb
ohcS
lor
aK
sme
tsys
OMI
M po
ol-d
esol
c rof
noit
ami
tse l
enna
hc d
na k
cabd
eef
deti
miL
yti
srev
in
U otl
aA
6102
scitsuocA dna gnissecorP langiS fo tnemtrapeD
dna kcabdeef detimiL rof noitamitse lennahc
smetsys OMIM pool-desolc
rebohcS loraK
LAROTCOD SNOITATRESSID
Page 2
seires noitacilbup ytisrevinU otlaASNOITATRESSID LAROTCOD 332 / 6102
lennahc dna kcabdeef detimiL OMIM pool-desolc rof noitamitse
smetsys
rebohcS loraK
fo rotcoD fo eerged eht rof detelpmoc noitatressid larotcod A eht fo noissimrep eht htiw ,dednefed eb ot )ygolonhceT( ecneicS
cilbup a ta ,gnireenignE lacirtcelE fo loohcS ytisrevinU otlaA dn2 no loohcs eht fo 1S llah erutcel eht ta dleh noitanimaxe
.noon kcolc'o 21 ta 6102 rebmeceD
ytisrevinU otlaA gnireenignE lacirtcelE fo loohcS
scitsuocA dna gnissecorP langiS fo tnemtrapeD
Page 3
rosseforp gnisivrepuS namhciW otsiR .forP
rosivda sisehT
namhciW otsiR .forP
srenimaxe yranimilerP ASU ,nitsuA ta saxeT fo ytisrevinU ehT ,iohC linuJ .rD
ASU ,noitaroproC letnI ,ladnoM purawhsiB .rD
tnenoppO ynamreG ,grebnrüN-negnalrE tätisrevinU ,rellüM flaR .gnI-.rD .forP
seires noitacilbup ytisrevinU otlaASNOITATRESSID LAROTCOD 332 / 6102
© rebohcS loraK
NBSI 0-9117-06-259-879 )detnirp( NBSI 3-8117-06-259-879 )fdp(
L-NSSI 4394-9971 NSSI 4394-9971 )detnirp( NSSI 2494-9971 )fdp(
:NBSI:NRU/if.nru//:ptth 3-8117-06-259-879
yO aifarginU iknisleH 6102
dnalniF
Page 4
tcartsbA otlaA 67000-IF ,00011 xoB .O.P ,ytisrevinU otlaA if.otlaa.www
rohtuA rebohcS loraK
noitatressid larotcod eht fo emaN smetsys OMIM pool-desolc rof noitamitse lennahc dna kcabdeef detimiL
rehsilbuP gnireenignE lacirtcelE fo loohcS tinU scitsuocA dna gnissecorP langiS fo tnemtrapeD
seireS seires noitacilbup ytisrevinU otlaA SNOITATRESSID LAROTCOD 332 / 6102 hcraeser fo dleiF snoitacinummoC rof gnissecorP langiS
dettimbus tpircsunaM 6102 hcraM 71 ecnefed eht fo etaD 6102 rebmeceD 2 )etad( detnarg hsilbup ot noissimreP 6102 yluJ 21 egaugnaL hsilgnE
hpargonoM noitatressid elcitrA noitatressid yassE
tcartsbAeht ni serutaef yek eht fo eno neeb evah seuqinhcet )OMIM( tuptuo-elpitlum-tupni-elpitluM
ot erutaef yek a eb ot detcepxe osla era dna ,dradnats ralullec ETL PPG3 desrodne-yllabolg rettimsnart OMIM A .murtceps evaw-mm eht ni ssol-htap desaercni eht rof etasnepmoc
ni ,eroferehT .niag gnimrofmaeb tsevrah ot redro ni lennahc OMIM fo egdelwonk seriuqer htiw metsys )DDT( xelpud noisivid emit eht ro ,metsys )DDF( xelpud noisivid ycneuqerf
morf kcabdeef detimil no yler ot sah rettimsnart eht ,sniahc knilnwod dna knilpu detarbilacnu .yticapac knil kcabdeef detimil eht fo ecneuqesnoc a era stniartsnoc kcabdeeF .reviecer a
rehtegot ,dlofinam lefeitS eht sa ecaps gnidocerp OMIM eht ebircsed yltsrfi ew ,siseht siht nI ,rehtruF .sdlofinam galF eht dna nainnamssarG eht ;secaps tneitouq tnaveler-OMIM sti htiw
eht no noitcurtsnoc cisedoeg rof noitulos mrof-desolc evitanretla na ecudortni ew no noitcurtsnoc cisedoeg rof krowemarf a ecudortni ew dna ,dlofinam nainnamssarG
galF eht dna dlofinam lefeitS eht .e.i ,tsixe ton seod noitulos mrof-desolc a erehw ,sdlofinam .dlofinam
ecnerefer cfiiceps-resu dedocerp yllaitaps eht no noitamitse lennahc ssucsid ew ,yldnoceS .gnidocerp ETL pool-desolc desab-DDF dna gnimrofmaebnegiE desab-DDT htiw ,slobmys gnidnopserroc eht ,dnab ycneuqerf detacolla eht ssorca deirav si redocerp laitaps eht nehW
morf sreffus ro/dna seitreporp noitalerroc ycneuqerf sti segnahc lennahc evitceffe .gnissecorp langis rettimsnart lanoitidda yb delkcat era seussi htob ,niereH .seitiunitnocsidresu-itlum ,OMIM )US( resu-elgnis rof ngised kcabdeef ot detacided si siseht eht fo tser ehT mhtirogla gnikcap ecapsbus a poleved eW .)PMoC( tniop-itlum detanidrooC dna OMIM )UM( nihtiw yltnatsidiuqe stniop gnicalp mhtirogla nim-xam eht ot suogolana si hcihw ACE dellac
.scisedoeg yb detutitsbus era senil thgiartS .elgnatcer lanoisnemid-owt dnuora-parw eht raenil mrofinu htob rof ngised koobedoc-elbuod ETL ot stnemevorpmi edivorp ew ,rehtruF
.syarra deziralop-ssorc dna syarradezilamron eht fo egdelwonk morf stfieneb euqinhcet OMIM-UM rotcevnegie dezilareneg A
dna seulavnegie dezilamron eht ezitnauq yletarapes eW .rettimsnart eht ta xirtam ecnairavoc eht nO .meht neewteb stib kcabdeef fo tilps lamitpo eht yduts dna ,srotcevnegie gnidnopserroc
yam ecnamrofrep OMIM-UM dna ,seulavnegie fo kcabdeef troppus ton seod ETL ,dnah rehto ETL na ni teS .rettimsnart eht ta srotcevnegie fo egdelwonk eht gnivorpmi yb ylno devorpmi eb -m lanoitidda eht gnisu euqinhcet tnemenfier evisseccus ytixelpmoc-wol a esoporp ew ,txetnoc
kcabdeef ssucsid ew ,yllaniF .rettimsnart eht ta noitalopretni lacisedoeg dna kcabdeef tseb ht tnerehoc-non dna tnerehoc rof tnemegnarra reyal elbixefl fo tpecnoc a ecudortni dna PMoC rof
.PMoC noissimsnart-tnioj OMIM-US sdrowyeK noitamitse lennahc ,cisedoeg ,ngised koobedoc ,OMIM
)detnirp( NBSI 0-9117-06-259-879 )fdp( NBSI 3-8117-06-259-879 L-NSSI 4394-9971 )detnirp( NSSI 4394-9971 )fdp( NSSI 2494-9971
rehsilbup fo noitacoL iknisleH gnitnirp fo noitacoL iknisleH raeY 6102 segaP 971 nru :NBSI:NRU/fi.nru//:ptth 3-8117-06-259-879
Page 6
Preface
The research work was carried at the Laboratory of Signal Processing
and Acoustics at Aalto University and during cooperation projects with
the Nokia Research Center and Renesas Mobile Europe. The last part of
the research work was carried out while employed at Nokia Technologies
and Nokia Networks.
I would like to especially thank Prof. Risto Wichman, who guided me
faithfully during my doctoral studies as my supervisor. In addition to all
the valuable professional guidance I received, he always made sure that I
had sufficient funding to be able to proceed with the studies.
Secondly, I wish to thank to pre-examiners, Dr. Bishwarup Mondal and
Dr. Junil Choi for their valuable comments and suggestions that helped
me to improve the content of the thesis, and to William Martin for improv-
ing the readability of the thesis.
Then I would like to thank to my co-authors and at the same time
(ex)colleagues with whom I had the wonderful privilege to work with.
From the industry sector D.Sc. Mihai Enescu, D.Sc. Tommi Koivisto,
D.Sc. Helka-Liina Määttänen, D.Sc. Timo Roman, D.Sc. Pekka Jänis,
and from the academic sector Prof. Olav Tirkkonen and D.Sc. Renaud-
Alexandre Pitaval. Thank you for all the valuable technical advice, lunch
discussions and the friendship throughout the years. From my co-authors,
I would like to especially thank to D.Sc. Mihai Enescu, who has been act-
ing as my second thesis advisor, guiding my work, and with whom we
have drafted many invention reports.
During my doctoral studies I had the great opportunity to work also
on many features of the 3GPP LTE standard; at the beginning design-
ing the 4Tx Release 8 codebook, later working on the 8Tx SU-MIMO,
MU-MIMO, coordinated multi-point (CoMP), network assisted interfer-
ence cancellation and suppression (NAICS), and finally working on the
1
Page 7
Preface
multi-user superposition transmission (MUST) and latency reduction. In
addition to my co-authors, I had the privilege to work with D.Sc. Klaus
Hugl, D.Sc. Cassio Ribeiro, D.Sc. Toni Huovinen, D.Sc. Panu Lähdekorpi,
Mikko Mäenpää, Juha Heiskala and Mikko Kokkonen. Out of my recent
colleagues I would like to thank to Timo Lunttila, Ankit Bhamri and D.Sc.
Juha Korhonen for the fruitful cooperation we have had.
Finally, I would like to thank to my parents Anna and Karel, sister
Michaela who were standing by me also when times were difficult. To
all my friends without whom my life would be miserable, especially my
board game evening buddies and good friends Dr.Soc.Sc. Michael Egerer,
Michal Hronec, D.Sc. Michal Cierny, D.Sc. Philip Jacob Mathecken and
Jaakko Ojaniemi, my ex-flatmate Alexander Winkler, and my long-term
friends Zbynek Šrubar and Tyler Lulich. At last but not least I would
like to thank to my girlfriend, Eliisa Kylkilahti who has provided all the
necessary support to me during these challenging times.
Helsinki, October 23, 2016,
Karol Schober
2
Page 8
Contents
Preface 1
Contents 3
List of Publications 5
Author’s Contribution 7
Symbols and Abbreviations 9
1. Introduction 15
1.1 Objectives and goals . . . . . . . . . . . . . . . . . . . . . . . 17
1.2 Background and contribution . . . . . . . . . . . . . . . . . . 18
1.3 Contribution summary . . . . . . . . . . . . . . . . . . . . . . 23
1.4 Structure of the thesis . . . . . . . . . . . . . . . . . . . . . . 24
2. Manifold theory 25
2.1 Manifolds in MIMO . . . . . . . . . . . . . . . . . . . . . . . . 26
2.2 Geodesics on the MIMO-relevant manifolds . . . . . . . . . . 27
3. MIMO channel properties and estimation 33
3.1 Channel models . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.2 Pilot-based channel estimation . . . . . . . . . . . . . . . . . 36
3.3 System model . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.4 Channel estimation with Eigenbeamforming . . . . . . . . . 38
3.5 Channel estimation of user-specific downlink channel with
limited feedback . . . . . . . . . . . . . . . . . . . . . . . . . . 42
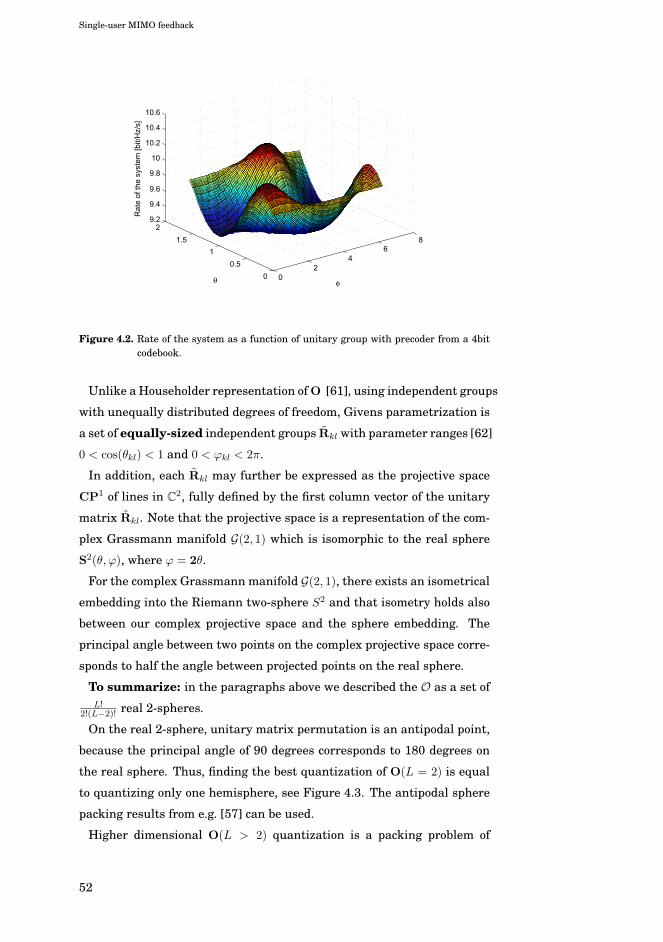
4. Single-user MIMO feedback 47
4.1 System model . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.2 Codebook for IID channels . . . . . . . . . . . . . . . . . . . . 48
3
Page 9
Contents
4.2.1 Orthogonalization codebooks . . . . . . . . . . . . . . 51
4.2.2 Grassmanian codebooks . . . . . . . . . . . . . . . . . 53
4.3 Codebook design for wireless standards . . . . . . . . . . . . 57
4.3.1 Adaptive codebooks . . . . . . . . . . . . . . . . . . . . 59
5. Multi-user MIMO feedback 65
5.1 System model . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
5.2 MU-MIMO transmit processing . . . . . . . . . . . . . . . . . 66
5.3 Feedback for GE precoding . . . . . . . . . . . . . . . . . . . . 68
5.4 Improving the CSI by successive refinement . . . . . . . . . 70
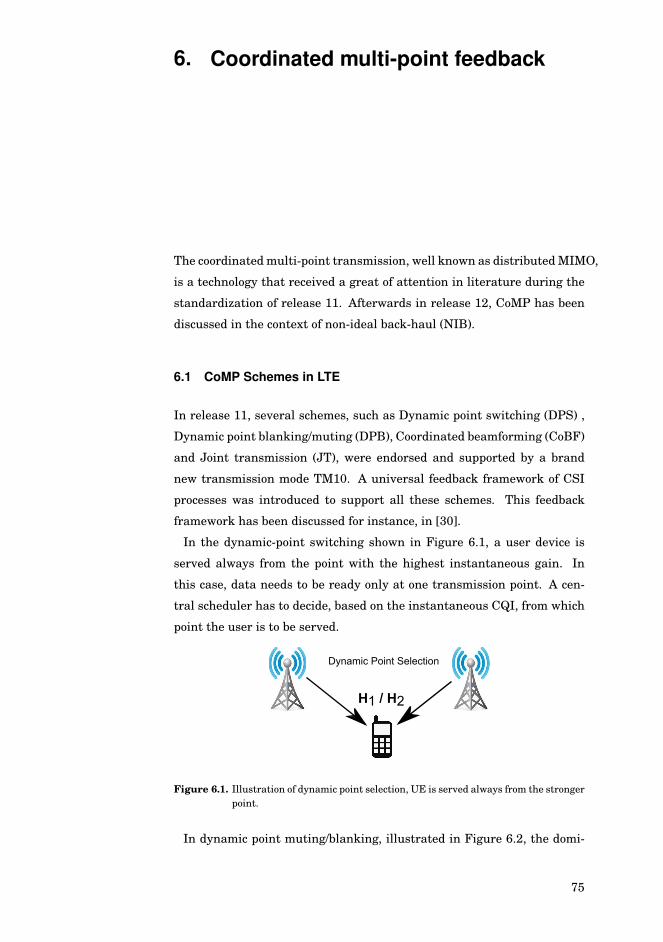
6. Coordinated multi-point feedback 75
6.1 CoMP Schemes in LTE . . . . . . . . . . . . . . . . . . . . . . 75
6.2 CoMP Feedback . . . . . . . . . . . . . . . . . . . . . . . . . . 76
7. Summary 81
References 85
Errata 93
Publications 95
4
Page 10
List of Publications
This thesis consists of an overview and of the following publications which
are referred to in the text by their Roman numerals.
I Määttänen Helka-Liina, Schober Karol, Tirkkonen Olav, Wichman Risto.
Precoder partitioning in closed-loop MIMO systems. IEEE Transactions
on Wireless Communications, Vol: 8, Issue: 8, p. 3910 - 3914, Aug. 2009.
II Schober Karol, Jänis Pekka, Wichman Risto. Geodesical codebook de-
sign for precoded MIMO systems. IEEE Communications Letters, Vol: 13,
Issue: 10, p. 773 - 775, Oct. 2009.
III Schober Karol, Renaud-Alexandre Pitaval, Wichman Risto. Improved
User-specific Channel Estimation using Geodesical Interpolation at the
Transmitter. IEEE Wireless Communications Letters, Vol: 4, Issue: 2,
p. 165 - 168, Jan 2015.
IV Schober Karol, Wichman Risto, Roman Timo. Layer arrangement for
single-user coordinated multi-point transmission. In 2012 46th Annual
Conference on Information Sciences and Systems (CISS) , Princeton, NJ,
p. 1-5, Mar. 2012.
V Schober Karol, Wichman Risto, Koivisto Tommi. Refinement of MIMO
limited-feedback using second best codeword. In IEEE 2009 20th Inter-
national Symposium on Personal, Indoor and Mobile Radio Communi-
cations, Tokyo, Japan, p. 2529 - 2533, Sep. 2009.
5
Page 11
List of Publications
VI Schober Karol, Määttänen, Helka-Liina, Tirkkonen Olav, Wichman
Risto. Normalized covariance matrix quantization for MIMO broadcast
systems. In 11th European Wireless Conference 2011 - Sustainable Wire-
less Technologies (European Wireless), Vienna, Austria, p. 1 - 6, Apr.
2011.
VII Schober Karol and Wichman Risto. MIMO-OFDM Channel Estima-
tion with Eigenbeamforming and User-Specific Reference Signals. In
IEEE 69th Vehicular Technology Conference, Spring 2009, Barcelona,
Spain, p. 1 - 5, Apr. 2009.
VIII Schober Karol, Wichman Risto, Koivisto Tommi. MIMO Adaptive
Codebook for Closely Spaced Antenna Arrays. In 19th European Signal
Processing Conference (EUSIPCO 2011), Barcelona, Spain, p. 1 - 5, Sep.
2011.
IX Schober Karol, Wichman Risto, Koivisto Tommi. MIMO adaptive code-
book for cross-polarized antenna arrays. In 2013 IEEE 24th Interna-
tional Symposium on Personal, Indoor and Mobile Radio Communica-
tions, London, UK, p. 1 - 5, Sep. 2013.
X Schober Karol, Mihai Enescu, Risto Wichman. Geodesical Refinement
of MIMO Limited Feedback. In IEEE Transactions on Communications,
Vol: 64, Issue: 3, p. 1031 - 1041, Jan. 2016.
6
Page 12
Author’s Contribution
Publication I: “Precoder partitioning in closed-loop MIMO systems”
Author drafted chapter IV and designed the quantizations for the Gras-
mannian and Orthogonalization codebooks.
Publication II: “Geodesical codebook design for precoded MIMOsystems”
The author wrote the first draft, derived the theoretical studies and per-
formed all computer simulations.
Publication III: “Improved User-specific Channel Estimation usingGeodesical Interpolation at the Transmitter”
The author wrote the first draft, derived the theoretical studies and per-
formed the computer simulations. The tangent space of the Flag manifold
was provided by D.Sc (Tech.) Renaud-Alexandre Pitaval.
Publication IV: “Layer arrangement for single-user coordinatedmulti-point transmission”
The author produced the first written draft, derived the theoretical stud-
ies and performed all computer simulations.
7
Page 13
Author’s Contribution
Publication V: “Refinement of MIMO limited-feedback using secondbest codeword”
The author wrote the first draft, derived the theoretical studies and per-
formed the computer simulations.
Publication VI: “Normalized covariance matrix quantization forMIMO broadcast systems”
The author wrote the first draft, derived the theoretical studies and per-
formed all computer simulations.
Publication VII: “MIMO-OFDM Channel Estimation withEigenbeamforming and User-Specific Reference Signals”
The author wrote the first draft, derived the theoretical studies and per-
formed the computer simulations.
Publication VIII: “MIMO Adaptive Codebook for Closely SpacedAntenna Arrays”
The author wrote the first draft, derived the theoretical studies and per-
formed all computer simulations.
Publication IX: “MIMO adaptive codebook for cross-polarizedantenna arrays”
The author wrote the first draft, derived the theoretical studies and per-
formed the computer simulations.
Publication X: “Geodesical Refinement of MIMO Limited Feedback”
The author wrote the first draft, derived the theoretical studies and per-
formed all computer simulations.
8
Page 14
Symbols and Abbreviations
Acronyms
2D two-dimensional
3D three-dimensional
3GPP The 3rd Generation Partnership Project
5G 5th generation
AAS active antenna systems
AoA angle of arrival
AoD angle of departure
BD block diagonalization
BER bit error rate
BLER block error rate
CA carrier aggregation
CCI co-channel interference
CDF cumulative density function
CDI channel direction information
CM constant modulus
CoBF coordinated beamforming
CoMP coordinated multi point
CP cyclic prefix
CQI channel quality index
9
Page 15
Symbols and Abbreviations
CRS common reference signals
CS coordinated scheduling
CSI channel state information
CSI-RS channel state information reference signals
DCB double codebook
DCC double description coding
DMRS demodulation reference signals
DPB dynamic point blanking
DPC dirty paper coding
DPS dynamic point selection
DRS dedicated reference signals
DVB-T Digital Video Broadcasting, Terrestrial
eNB evolved Node B
FD-MIMO full dimension MIMO
FDD frequency division duplex
FFT fast Fourier transform
GoB grid of beams
GPS global positioning system
IEEE Institute of Electrical and Electronics Engineers
IID independent and identically distributed
IMR interference measurement resource
IoT internet of things
IRC interference rejection
ITU International Telecommunication Union
JT joint transmission
LMMSE linear minimum mean square error
10
Page 16
Symbols and Abbreviations
LoS line-of-sight
LSP large scale parameter
LTE Long Time Evolution
MCS modulation and coding scheme
MDC multi description coding
METIS2020 Mobile and wireless communications Enablers for Twenty-
twenty (2020) Information Society
MISO multi input single output
ML maximum likelihood
MMSE minimum mean square error
MP multi point
MRC maximum ratio combining
MSE mean square error
MU-MIMO multi-user multiple-input-multiple-output
MUST multi-user superposition coding
NIB non-ideal backhaul
NLoS non-line-of-sight
OCI other cell interference
OFDMA orthognal frequency division multiple access
PDSCH pysical downlink shared channel
PM precoding matrix
PMCH physical multicast channel
PMI precoding matrix index
PRB physical resource block
PSK phase shift keying
R-ML reduced maximum likelihood
RE resource element
11
Page 17
Symbols and Abbreviations
RRH radio remote head
RS reference signals
SC single-cell
SCM spatial channel model
SFN single frequency network
SIC successive interference cancellation
SINR signal to interference and noise ratio
SLNR signal-leakage-to-noise precoding
SQ scalar quantization
SVD singular value decomposition
TDD time division duplex
TM transmission mode
UBF unitary beamforming
ULA uniform linear array
UMTS universal mobile telecommunications system
VQ vector quantization
WINNER Wireless World Initiative New Radio
ZF-BF zero-forcing beamforming
Greek Symbols
Γ(•) geodesic
Δ horizontal space
η(•) horizontal lift
Π vertical space
ρf (•) frequency correlation function
ρt(•) time correlation function
σ(•) affine cross-section
12
Page 18
Symbols and Abbreviations
Roman Symbols
E(•) expectation
FL Flag manifold
G Grassmannian manifold
H channel matrix
J(•) cost function
L number of layers
Nb number of neighboring beam in a codeword
Nr number of receive antennas
Nt number of transmit antennas
ST Stiefel manifold
U unitary group
W precoding matrix
Other Symbols
(•)∗ conjugate
(•)H hermitian transpose
(•)T transpose
∗ convolution
∠ angle of a complex number
det(•) determinant
exp(•) matrix exponential
logb logarithm of base b
� Hadamard product
⊗ Kronecker product
Re (•) real part of a complex number
Tr(•) matrix trace
vec(•) vectorization of a matrix
13
Page 19
Symbols and Abbreviations
14
Page 20
1. Introduction
The wireless industry is continuously evolving, trying to satisfy the in-
creasing bit-rate demand. This demand is a consequence of the growing
number of mobile devices, such as tablets, smart-phones and laptops. Fur-
thermore, it is expected that in the near future, things around us will be-
come connected as well, forming the internet of things (IoT), a network
with billions of devices all interconnected in the smart cities of the future.
Although the physical layer nowadays performs close to Shannon capac-
ity limits, even a modest improvement can significantly improve system
performance. In a cellular network, modest physical layer improvements
may be amplified. When a cell serves a terminal faster, within saved time
it may switch off and such avoid causing interference for other network
terminals. Other terminals obviously benefit from the improved interfer-
ence conditions. Improved throughput results again into shorter serving
time and increases the possibility of an empty cell, which decreases inter-
ference levels.
There exist several approaches how to increase data rates on the physi-
cal layer. The most straight-forward link-level approach is the extension
of communication spectrum, if available. This approach has been used, for
example, in 3GPP LTE Release 10-13 system [1] under the name Carrier-
aggregation (CA) [2] and is applicable also in the future, when moving to
mm-waves (30-300GHz), where a sufficient amount of resources is avail-
able. Another approach is to increase capacity by multiplexing users at
the same time-frequency resource. This can be implemented:
• in power/bit domain, by removing the signal targeted for companion
user using successive-interference-cancellation (SIC) [3] or a maximum-
likelihood (ML) receiver [4]. These are known as multi-user superposi-
tion transmission (MUST).
15
Page 21
Introduction
• in spatial domain, known under multi-user multi-input-multi-output
(MU-MIMO).
Multi-user superposed transmission (MUST) is a capacity enhancement
technique proposed already in 1972 by [5]. In theory, the capacity gain of
MUST comes from multiplexing users with imbalanced channel qualities.
The user with better channel quality is further referred to as a near-user,
and the one with a worse channel as a far-user. MUST is known in litera-
ture as well as non-orthogonal multiple access (NOMA) [3].
In terms of practical applicability, a superposition-type of transmission
has been used only for multi-cast systems, such as DVB-T, where a base
layer quality stream is broadcast to all receivers, while a higher quality
superposed stream only to those with good channel conditions [6]. Re-
cently however, MUST in the context of unicast traffic gained its atten-
tion in the 5G Metis2020 [7] project as well as 3GPP LTE [8] where it is
currently under the process of standardization. Unlike multi-user (MU)-
MIMO, [9, 10], MUST serves users on the same beam or close to the same
spatial beams.
The superposition of two signals may happen in the power domain [3], as
well as in the bit domain [4, 11]. The biggest advantage of the bit-domain
superposition is that signals transmitted to both users on the same ex-
act beam may be Gray-labelled, and maximum likelihood (ML) or reduced
complexity ML (R-ML) detection can be used at the near-user without de-
coding the far-user transmission. On the other side, in the power domain,
superposition may happen as well on the neighboring beams, however
successive cancellation of a far-user signal at the near-user needs to be
performed before detection of its own signal.
Spatial multiplexing can be implemented with several techniques, such
as zero-forcing (ZF-BF) [10, 9], Unitary beamforming (UBF) [12, 13] or
Signal-leakage-to-noise precoding (SLNR) [14]. In this thesis we will dedi-
cate a complete chapter to MU-MIMO and, therefore, we will omit lengthy
discussion at this point.
One further system-level approach to increase data rates is interfer-
ence coordination. In 3GPP LTE Release 11, the network interference
coordination concept is known under the name Cooperative Multi-Point
(CoMP). CoMP includes subset techniques like Multi-point Coordinated
Beamforming (MP-CoBF), coordinated scheduling (CS) or joint transmis-
sion (JT), where all these techniques try to coordinate transmissions from
16
Page 22
Introduction
various transmission points in the network and in such a way minimize
the interference. These approaches require information exchange between
transmission points as well as an increased amount of feedback from ter-
minals.
Even though feedback design for MIMO systems has been heavily inves-
tigated in the first decade of the 21st century, there are areas of MIMO
still under investigation. An example is Full-dimension(FD) / Massive
MIMO . This technology was standardized in its first version in Release 13
of 3GPP LTE. FD-MIMO is enabled by active antenna systems (AAS) [15],
where each antenna element contains its own power amplifier placed be-
hind itself. The compactness of this antenna array enables design of large
antenna arrays, forming narrow precise beams in horizontal as well as
vertical domains, enabling a high degree of spatial multiplexing and en-
ergy steering. AAS requires only baseband feed and, therefore, reduces
installation costs. The codebook for AAS has been standardized in Re-
lease 13. This codebook employs a double structure, where the long-term
wide-band part of the codebook is based on Kronecker product of hori-
zontal and vertical DFT vectors. The Kronecker structured codebook for
AAS was studied as well in [16]. Authors in [16] identified limitations
in the Kronecker structure, when there is more than one dominant beam
present in a MIMO channel. As an enhancement, authors propose pre-
coding codewords being a linear combination of DFT vectors.
1.1 Objectives and goals
The goal of this thesis is to develop efficient feedback for MIMO systems,
and its variations with respect to SU-MIMO, MU-MIMO and CoMP. The
codebook design is a key research topic of this thesis. We study the code-
book design for uncorrelated as well as correlated spatial channels, as
well as MU-MIMO related codebook design and specific design for lin-
ear receivers. The other goal of the research is the design of successive
feedback refinement for temporally-correlated channels. When a chan-
nel is slowly changing, and there is enough feedback capacity, the user
reporting precoder from a course codebook can send refinement informa-
tion for the previously reported codeword. This is similar to a one-step
differential feedback. We propose one low complex well performing solu-
tion suitable for industrial systems. One chapter of this thesis discusses
channel estimation on user-specific reference signals. The application of
17
Page 23
Introduction
spatial precoders on reference signals creates a channel discontinuity and
can as well change the correlation properties of a channel. This topic has
not been studied much in academics, but is clearly a practical issue in a
wireless system employing user-specific reference symbols.
1.2 Background and contribution
MIMO systems with frequency division duplex (FDD) require channel
state information (CSI) to be fed back from a receiver to a transmitter. The
need for such a feedback is a consequence of independent fading of uplink
and downlink channels. Communication systems employing CSI feedback
are closed-loop MIMO systems. Contrary to FDD, in time division duplex
(TDD), the uplink and downlink channels are considered reciprocal when
transmitter and receiver chains are calibrated. In TDD, feedback is re-
placed by the terminal transmitting sounding reference symbols in the
uplink, aiding reciprocal channel estimation at the transmitter.
CSI can be fed back explicitly, i.e each channel component absolute value
and phase is quantized directly or jointly and fed back. This approach has
one major drawback. It does not include receivers processing capabil-
ity within the feedback. Alternatively, industrial systems such as IEEE
802.11n [17] and 3GPP LTE Release 8-13 [8] implemented implicit signal-
ing. In this type of signaling, a jointly quantized semi-unitary precoding
matrix index (PMI) is selected by the receiver along with a channel qual-
ity indicator (CQI) and fed back to a transmitter. CQI is expressed as a
modulation and coding scheme (MCS) class selected by the user terminal
from a predefined set of MCS classes.
With the implicit feedback, the CSI at the receiver is preferably quan-
tized jointly and is normalized to a power of one. This allows a good split
between the power of the channel and its spatial channel direction (CDI).
Furthermore, each stream/layer is transmitted on the orthogonal layer,
which minimizes inter-stream interference between layers. As a conse-
quence, the precoding-space is distributed on a curved space represented
by the Grassmanian manifold or, in some cases, the Stiefel/Flag mani-
fold if unitary rotation of precoding matrix subspace matters, which is
addressed in Publication I.
In SU-MIMO, the transmitter uses the user’s latest reported PMI to
spatially precode data intended for the user. This does not hold anymore
with MU-MIMO. In MU-MIMO, the transmitter tries to minimize inter-
18
Page 24
Introduction
ference to a co-channel user and, therefore, modifies the reported PMI.
The most known MU-MIMO transmit processing scheme is zero-forcing
beamforming (ZF-BF). It has been developed originally for single-layer
and its extension to more transmit layers per user is called block diago-
nalization (BD). However, in both ZF-BF and BD, the number of transmit-
ted data streams should be equal to the number of receive antennas. To
allow a different number of data streams and number of antennas, sev-
eral strategies can be applied. Firstly, the user may fix receive-filter and
feedback only eigenmode(s) [18]. Fixing the receive-filter is however not
wise. The optimal receive filter at the time of transmission may be dif-
ferent from the one used at the time of feedback report. Receiver chain
phases may drift, or interference may change as well over time. Secondly,
the user may be aware of co-channel interference and suppress this in-
terference on sub-carrier bases using e.g. an LMMSE/IRC receiver. The
second solution has been adopted by LTE Release 10 standard. Finally,
the user may optimize the receive and transmit filter jointly, which is
referred to as Single-cell Coordinated beamforming (SC-CoBF). A coor-
dinated beamforming optimum can be obtained by iterative algorithms.
However, these are not preferred by practical systems, because their pro-
cessing complexity and delay is higher compared to closed-form solutions.
One closed-form solution for SC-CoBF called the Generalized eigenvalue
algorithm has been introduced in [19]. This algorithm requires the feed-
back of normalized channel covariance matrix instead of CDI and uses an
MRC receiver for reception. The strategy for direct quantization of such
a normalized covariance matrix has been proposed in an original publica-
tion for two transmit antennas [19] and extended to an arbitrary number
of antennas in [20]. Alternative quantization, proposed in Publication VI
quantizes separately eigenvalues and CDI and allows flexible trade-off be-
tween bits invested in eigenvalues and CDI. Furthermore, Publication VI
shows that importance of eigenvalues depends on antenna configuration.
For every channel-source there exists an optimal quantization given a
metric. The most general channel component source is independent and
an identically distributed (IID) Gaussian source. This type of channel
serves well for analysis purposes, however does not correspond well to
real life channels experiencing spatial-correlation. The precision of chan-
nel models has been developed hand-in-hand with increasing computa-
tional availability. Firstly, the simple Kronecker channel model described
e.g. in [21] has been used for evaluation of MIMO systems. Later, it
19
Page 25
Introduction
has been replaced by more complex full spatial cluster based models,
such as SCM [22] and WINNER II [23], and in the future high-complex
ray-tracing channel models, such as Winprop, are expected to be a base-
line for system and link performance evaluation in 5G. In the Kronecker
model, spatial correlation is created by the Kronecker product between
the square-root of the correlation matrix and the MIMO independent chan-
nel components of the Gaussian distribution. This model has no geo-
metrical structure background. Contrary, the full spatial channel models
contain channel correlation implicitly as a consequence of realistic clus-
ter/obstacles in the space. As a consequence, antenna separation as well
as the angular spread of a channel influence the instantaneous spatial
correlation. We will discuss channel models more in Chapter 3.
The channel model source determines the distribution of subspaces on
a manifold. To learn more about manifolds please refer to Chapter 2. In
case of IID Gaussian distribution with unit variance and zero mean, sub-
spaces/points on the Grassmannian manifold are distributed uniformly.
An efficient way to design optimal codebooks for uniform distributions
is a geodesical packing algorithm introduced in Publication II. In addi-
tion to coherent MIMO precoding, Grassmannian packings may form a
transmit symbol constellation used for non-coherent MIMO communica-
tion [24]. However, when spatial correlation is present in the channel, a
different optimal codebook can be designed given that correlation. There-
fore, an optimal codebook should adapt to the actual channel source. The
first proposed solution to adapt to a transmit correlation matrix was pro-
posed in [25], all codewords of the uniform IID codebook are transformed
by square-root of estimated transmit-correlation matrix. This elegant so-
lution, however, has one major issue preventing it from being used in
industrial standards. Such a transformation cannot guarantee that the
transformed codebook keeps its components constant modulus, nor can
guarantee that two-layer codebook codewords stay orthogonal. Constant
modulus property was and is an important codebook property that lowers
the codeword selection complexity at the receiver. In order to enable an
adaption of the codebooks in the wireless standards an alternative solu-
tion, called a double codebook, was invented and standardized. The final
codeword is computed as a simple product of two codewords selected from
two codebooks of a specific structure. One codeword is selected wideband
and with long periodicity and the other one is selected sub-band and with
short periodicity. Double codebook optimization for uniform linear arrays
20
Page 26
Introduction
is proposed in Publication VIII and for cross-polarized arrays in Publi-
cation IX. Codebook design for industry is discussed in more detail in
Chapter 4.
MU-MIMO and SU-MIMO systems with temporally-correlated channels
benefit from more precise feedback. A straightforward solution to improve
CSI at the transmitter is to invest more bits in a codebook. Unfortunately,
codeword selection complexity grows exponentially with codebook size. To
keep the size of the codebook low, CSI can be refined by a codeword from
a refinement codebook. Several techniques deal with the design of refine-
ment [26, 27, 28, 29]. In addition, a low complex refinement technique
has been proposed in Publication V and Publication III. This technique
uses geodesical interpolation to the m-th best codeword. Further details
on codebook refinement techniques will be presented in Section 5.4.
In order to receive spatially precoded data coherently, data are trans-
mitted together with reference symbols that aid the channel estimation.
The channel estimation may be carried out in two different ways. Firstly,
the channel at the receiver may be estimated for a full/clean MIMO spa-
tial channel that is consequently multiplied by the spatial precoder used
for data transmission. This approach requires knowledge of the used spa-
tial precoder at the receiver, however only one set of reference symbols is
needed for both PMI feedback estimation and data reception. Secondly, an
effective channel may be estimated directly if the transmitter applies the
same PMI used for the data as well the reference symbols. In this case,
the reference symbols are user-specific and the transmitter does not need
to inform the user about the spatial precoder applied to the data. More-
over, with user-specific reference symbols, feedback overhead scales with
the number of data streams transmitted. On the other side, one set of
reference symbols is needed for data reception and another set is needed
for feedback estimation.
User-specific RS allow the transmitter to apply a precoder of its own
choice. In TDD, where the reciprocal channel may be available at the
transmitter, Eigenbeamforming may be applied. Eigenbeamforming uses
dominant singular vector(s) to spatially precode the transmitted data. As
a consequence, neighboring sub-carriers may be precoded with a different
spatial precoder. This changes the characteristics of the user-specific pre-
coded channel. Particularly, coherence bandwidth may decrease as sud-
den artificial changes in phase and amplitude may occur between neigh-
boring sub-carriers. These coherence issues were addressed in Publica-
21
Page 27
Introduction
tion VII where we proposed an algorithm to maximize the coherence band-
width of the spatially precoded channel.
In LTE, for transmission modes introduced from Release 10 onwards,
user-specific reference symbols are transmitted to aid data channel es-
timation. Furthermore, the spatial precoder is forced to be the same
within a block of 12 subcarriers (physical resource block, a PRB). There-
fore, similar amplitude and phase discontinuities, as in Eigenbeamform-
ing between sub-carriers, exist as well between PRBs. These disconti-
nuities are called the channel estimation edge effect and allow channel
estimation only within this one PRB. Lack of frequency domain interpola-
tion between reference symbols motivated the LTE system to adopt PRB
bundling. Bundling guarantees that three neighboring PRBs are precoded
with the same precoder. However, PRB bundling is not the best solution.
In Publication III, we proposed a geodesical interpolation of fed-back fre-
quency selective PMIs and showed that channel estimation performs bet-
ter than with PRB bundling. Furthermore, we provided a way how to
generate a geodesic on a Flag manifold and showed that a Flag-manifold
geodesic PMI interpolation is more suitable for two-layer transmission
than a Grassmanian- and Stiefel-manifold geodesic interpolation.
Recently, coordinated multipoint (CoMP) systems collected a lot of atten-
tion while being standardized in Release 11 of 3GPP LTE. An overview of
CoMP technology in LTE Release 11 has been well summarized in [30].
In CoMP, transmission from different points is coordinated and such in-
terference in the network is minimized. One CoMP technology subgroup
is coordinated scheduling (CS), where the user reports channel quality
feedback CQI for several of the strongest points. This CQI knowledge be-
comes global in network and the global scheduler has knowledge about
what interference it causes to users across the network when performing
scheduling. Other CoMP subgroups are multi-point coordinated beam-
forming (MP-CoBF), where PMI for several transmission points is fed
back to the global scheduler. The users for a specific time-frequency re-
source are selected so that one transmission point serves its user within
the user’s signal space and at the same transmits to the null space of the
users served by other transmission points. The most complicated CoMP
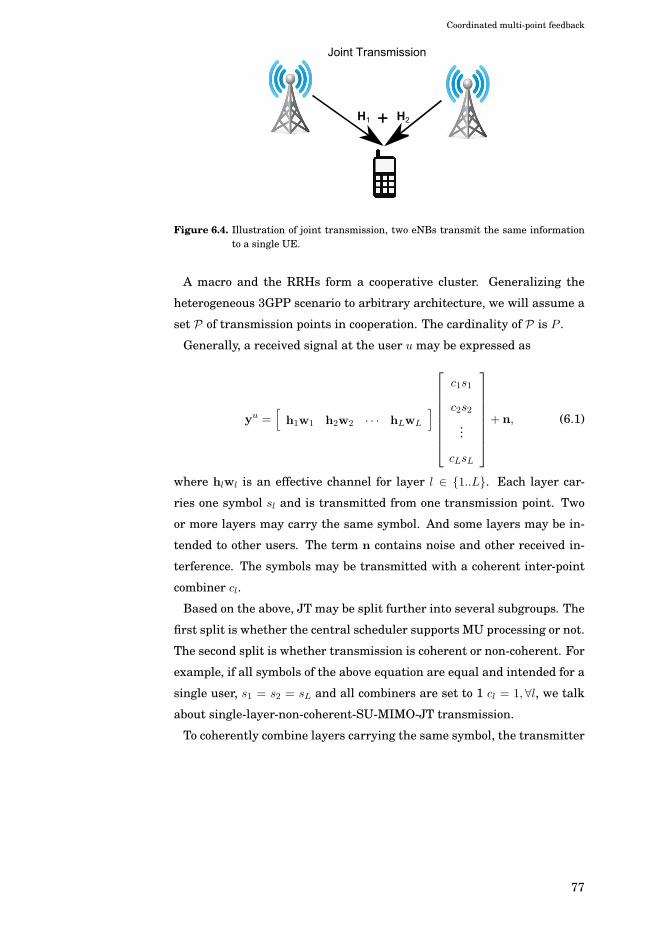
technology subgroup is joint transmission (JT). One user is served by mul-
tiple points at the same time. JT technology improves significantly cell-
edge user performance, however at the same time, it is very sensitive to
the timing advance of the signals and the transmission data have to be
22
Page 28
Introduction
distributed across the transmission point in cooperation.
Each of above mentioned CoMP techniques needs a different type of
feedback. The user, however cannot know which scheme will be selected
by the network and would have to feedback CSI for all schemes, causing
high uplink overhead in the network. Therefore, in LTE, unified feedback
supporting all schemes was designed. In LTE Release 11, the user re-
ports PMI and CQI per configured transmission points, while additional
inter-point feedback will be under discussion in future releases. Per-point
PMI feedback is scalable and flexible, and has been studied e.g. in [31].
Additional inter-point feedback, such as a PMI combiner, was shown to
be beneficial in [32]. Another form of additional inter-point feedback is
layers arrangement across points, which has been studied in Publication
IV and shown to bring sufficient performance gains with only moderate
feedback. CoMP is discussed in more detail in Chapter 6.
1.3 Contribution summary
Publication I - suggests precoding space partitioning into the Grassman-
nian and the Orthogonalization parts, and shows that feedback bits can be
more efficiently used by quantizing separately the Grassmannian and the
Orthogonalization parts of a precoder with linear receivers and especially
with correlated channels.
Publication II - presents an expansion-compression algorithm (ECA) for
finding packings of points on the Grassmannian manifold using various
distance metrics. With a certain distance-metrics, the algorithm tends to
get stuck and, therefore, compression is required in addition to expansion.
Publication III - shows how geodesical precoder interpolation at the
transmitter may improve channel estimation at the receiver by removal
of the boundary artifacts of channel estimation at the receiver side. The
precoder interpolation is performed on the Flag, Stiefel and Grassman-
nian manifolds by means of geodesic. An interative algorithm to design a
geodesic on the Flag manifold using boundary conditions is proposed.
Publication IV - proposes co-phasing feedback for coordinated multi-
point joint transmission along with the selection of layers for each trans-
mission point showing that it brings sufficient performance gains with
only moderate feedback.
Publication V - proposes geodesic interpolation between the first and
second best precoding matrices as a mechanism for providing successive
23
Page 29
Introduction
refinement of a feedback precoding matrix. Presents a closed-form so-
lution for an optimal interpolation parameter to maximize the received
power at the receiver. Simulation gains in LTE context are presented for
SU-MIMO.
Publication X - proposes geodesic interpolation between the first and
mth best precoding matrices as a mechanism for providing successive re-
finement of a feedback precoding matrix. In addition, this publication
derives an upper-bound of an optimal interpolation parameter, which can
be computed from fed-back CQI values at the transmitter. Simulation
gains in a LTE context are presented for MU-MIMO.
Publication VI - presents a new quantization scheme for a normalized
Wishart matrix. This scheme quantizes separately eigenvalues and CDI
and allows flexible trade-off between bits invested in eigenvalues and
CDI. It is shown that the importance of eigenvalues depends on antenna
configuration.
Publication VII - proposes a new method for retaining phase continuity
in the frequency domain after UE specific SVD beamforming is used. Sev-
eral methods to retain continuity are presented and their impact on the
channel frequency correlation is studied.
Publication VIII - proposes an optimization of a product codebook for
uniform-linear-arrays, with W1 representing long-term spatial correla-
tion properties and W2 representing short term/polarization/narrowband
properties and provides gains over the existing LTE codebook.
Publication IX - proposes an optimization of a product codebook for cross-
polarized arrays, with W1 representing long-term spatial correlation prop-
erties and W2 representing short term/polarization/narrowband proper-
ties and provides gains over the existing LTE codebook
1.4 Structure of the thesis
Further in the thesis, we introduce the reader to a MIMO-relevant mani-
fold theory and to geodesic construction on manifolds in Chapter 2. After-
wards, we discuss channel models and user-specific channel estimation in
Chapter 3. The codebook design is discussed in Chapter 4. Chapter 5 in-
troduces MU-MIMO techniques and successive feedback refinement and
Chapter 6 briefly addresses the coordinated-multipoint (CoMP). The the-
sis is concluded in Chapter 7.
24
Page 30
2. Manifold theory
Manifolds are closer to us than we think. All our life we walk on Earth,
a manifold. And in fact, we exist in a curved space-time, introduced by
Einstein, which is nothing else than a manifold, a pseudo-Riemannian
manifold. So what is that manifold?
By definition, a manifold is a topological space. Each point’s neigh-
borhood on the n-dimensional manifold is homeomorphic (similar) to n-
dimensional Euclidean space. For example, each point’s neighborhood on
the 2-sphere is homeomorphic to an Euclidean plane [33], a chart. If a
point’s neighborhood is similar enough to a linear space, it becomes a dif-
ferentiable manifold. Further, if a Riemannian metric exists on the man-
ifold, it becomes a Riemannian manifold. A Riemannian metric defines a
scalar product between the vectors of tangent space, smoothly depending
on the point on the manifold [34]. An example of a Riemannian manifold
is the already mentioned unit two-dimensional sphere embedded in E3
Euclidian space. Expressing the distance measure ds2 = dx2+dy2+dz2 in
spherical coordinates as ds2 = r2dθ2 + r2 sin θ2dφ2, and setting the radius
to r = 1. The scalar product is
G =
⎡⎢⎣ 1 0
0 sin θ2
⎤⎥⎦ . (2.1)
We can notice that the scalar product 1) depends on θ 2) is always positive
and 3) is a smooth function of θ.
In this chapter we will discuss only Riemannian manifolds relevant to
MIMO systems. In Section 2.1 we will introduce Stiefel, Grassmannian
and Flag manifolds, and in Section 2.2 we will construct geodesics on
these manifolds. The construction of a geodesic is a prerequisite in our
publications PII, PIII and PX.
25
Page 31
Manifold theory
2.1 Manifolds in MIMO
In precoded MIMO systems with equal transmit power per layer, a set of
all precoding matricesW for L layers transmitted over channelH with Nt
transmit antennas and Nr receive antennas is represented by a complex
Stiefel manifold ST (Nt, L), i.e.
ST (Nt, L) = {Y ∈ CNt×L|YHY = IL}, (2.2)
where L < Nt. The Stiefel manifold becomes a unitary group
U(Nt) = {U ∈ CNt×Nt |YHY = YYH = INt} (2.3)
when L = Nt.
However, the Stiefel manifold is not the manifold we are interested in,
because some points W on the Stiefel manifold are equivalent with re-
spect to MIMO closed-loop capacity C. The capacity of an instantaneous
MIMO channel H precoded by a spatial-precoder W can be expressed as
C = log2[det
(Ip +UH
LWHHHRHWUL
)], (2.4)
where R is a source-symbol covariance matrix and UL is an arbitrary
matrix from a unitary group U(L). Equation (2.4) shows that ∀UL ∈ UL,
capacity C is the same, because the determinant of a unitary matrix is one
and det(I+XY) = det(I+YX). A manifold, where points are equivalent
with respect to right unitary rotation by U(L), is called a Grassmannian
manifold, and is denoted as the quotient space of a Stiefel manifold
G(Nt, L) ∼= ST (Nt, L)/U(L). (2.5)
The capacity expressed in (2.4) assumes the presence of a non-linear
receiver, such as maximum likelihood, which can decouple MIMO layers.
However, user-terminals are often equipped only with linear receivers,
which are of modest complexity. In PI we have shown that with a linear
MMSE receiver, the capacity of a system is non-equivalent to right rota-
tion from right UL, while still equivalent to column phase rotation rep-
resented by a space of unitary diagonal matrices Udp. Therefore, matrices
W1 and W2 are equivalent if W1 = W2Udp = W2diag(e
jθ1 , ejθ2 , · · · , ejθL)).Such an equivalence class can be expressed as a general Flag manifold
FL(n, [p1, p2, ..., pL]) (2.6)
described in [35], where p1 = p2 = ... = pL = 1 further denoted as
FL(Nt, L). A Flag manifold can be expressed as the quotient space of
26
Page 32
Manifold theory
a Stiefel manifold
FL(Nt, L) ∼= ST (Nt, L)/U(1)L. (2.7)
In case L = 1, the Flag manifold FL(Nt, 1) is equivalent to the Grass-
mannian manifold FL(Nt, 1) ∼= G(Nt, 1). The three manifolds are of differ-
ent cardinality and the relation between them can be expressed as
G(Nt, L) ⊂ FL(Nt, L) ⊂ ST (Nt, L). (2.8)
2.2 Geodesics on the MIMO-relevant manifolds
Now when we defined MIMO manifolds, we can introduce geodesics on
them. We will start geodesic construction on a unitary group, to start
with the simplest case.
A unitary group U(Nt) is a set of unitary matrices of dimension Nt ×Nt, and every unitary matrix may be expressed by an exponential map
U = exp (X), where X is a skew-hermitian matrix and exp is a matrix
exponential
exp (X) =
∞∑k=0
1
k!Xk. (2.9)
A geodesic Γ on the manifold is a line that preserves tangent space.
Tangent space for a unitary group U(Nt) can be found easily [36] by dif-
ferentiating UHU = I, which yields UHU + UHU = 0. This means that
UHU must be a skew-hermitian matrix. A geodesic equation is an equa-
tion satisfying ΓHΓ = X, where X is a constant matrix. Such an equation
is
Γ(p) = U(0) exp (pX), (2.10)
where p tracks the geodesic. Having a geodesic equation for a manifold/set
of all unitary matrices, a unitary group, we may obtain geodesics as well
for the quotient spaces of the unitary group.
The Stiefel manifold ST (Nt, L) from (2.2) is a quotient space of U(Nt).
We can write Y = UINt,L, where INt,L is a matrix formed by the first L
columns of the Nt × Nt identity matrix. In other words, point Y on the
Stiefel manifold is equivalent to the set of unitary matrices having the
first L columns the same as Y. Quotient space is given by
[U] = U
⎡⎢⎣ Ip 0
0 U(Nt − L)
⎤⎥⎦ , (2.11)
27
Page 33
Manifold theory
where U(Nt − L) ∈ U(Nt − L).
Now, to construct a geodesic, we need to find a tangent space to the
Stiefel manifold. The tangent space consists of a vertical space Π and a
horizontal space Δ, these spaces being complementary to each other. The
vertical space is defined as a tangent to quotient space [U], and horizontal
space is then defined as its complement [36]. The vertical space
Π = U
⎡⎢⎣ 0 0
0 C
⎤⎥⎦ , (2.12)
where C is skew-hermitian satisfies [U]HΠ +ΠH[U] = 0. The horizontal
space of the Stiefel manifold is then a complement
Δ = U
⎡⎢⎣ A −BH
B 0
⎤⎥⎦ , (2.13)
where A is a skew-hermitian matrix and B is an arbitrary matrix.
Similarly, we derive vertical and horizontal spaces for Grassmannian
and Flag manifolds. For a Grassmannian manifold a quotient space is
[U] = U
⎡⎢⎣ U(L) 0
0 U(Nt − L)
⎤⎥⎦ . (2.14)
The vertical and horizontal space of a Grassmannian manifold are then
Π = U
⎡⎢⎣ A 0
0 C
⎤⎥⎦ ,Δ = U
⎡⎢⎣ 0 −BH
B 0
⎤⎥⎦ . (2.15)
For a Flag manifold a quotient space
[U] = U
⎡⎢⎢⎢⎢⎢⎢⎢⎣
⎡⎢⎢⎢⎢⎣U1(1) 0 0
0. . . 0
0 0 UL(1)
⎤⎥⎥⎥⎥⎦ 0
0 U(Nt − L)
⎤⎥⎥⎥⎥⎥⎥⎥⎦
(2.16)
was defined in PIII. The vertical and horizontal space of a Flag manifold
are then
Π = U
⎡⎢⎢⎢⎢⎢⎢⎢⎣
⎡⎢⎢⎢⎢⎣
a1 0 0
0. . . 0
0 0 aL
⎤⎥⎥⎥⎥⎦ 0
0 C
⎤⎥⎥⎥⎥⎥⎥⎥⎦,Δ = U
⎡⎢⎢⎢⎢⎢⎢⎢⎣
⎡⎢⎢⎢⎢⎣
0 −f∗1 −f∗
2
f1. . . −f∗
n
f2 fn 0
⎤⎥⎥⎥⎥⎦ −BH
B 0
⎤⎥⎥⎥⎥⎥⎥⎥⎦.
(2.17)
28
Page 34
Manifold theory
The geodesic on a manifold, according to [36], given a tangent vector in
horizontal space H ∈ Δ is
Γ(p) = U(0) exp (pH)INt×L, (2.18)
where Δ is as in (2.13),(2.15) and (2.17).
However, in MIMO communications H is typically not known. Instead,
we have typically two boundary points of a geodesic. In case of a Grass-
mannian manifold, the horizontal space is simple, and there exists a closed
form solution to derive H from two boundary points/precoders W1 and
W2.
According to PII, a geodesic between the two points W1 and W2 on the
Grassmannian manifold can be constructed by finding η(W2)W1 , a hori-
zontal lift of W2 at W1, which lies in the tangent (orthogonal) space of
point W1. Firstly, we find the affine cross-section σ(W2) of W⊥1 and fiber
represented by W2. The affine cross-section σW1(W2) is found by solving
WH1 (σ(W2) −W1) = 0, i.e. by setting σW1(W2) = W2(W
H1W2)
−1. Sec-
ondly, we compute the horizontal lift by projecting the affine cross-section
σ(W2) onto the orthogonal space of W1,
η(W2)W1 = (I−W1WH1 )σW1(W2) = σW1(W2)−W1, (2.19)
which has the singular value decomposition (SVD) U(tanΦ)VH , where U
is an orthogonal complement ofW1,Φ is a diagonal matrix of the principal
angles and V is a square unitary matrix. Finally, the geodesic from point
W1 towards point W2 having η(W2)W1 is given by [37]
Γ(p) =W1V cos(Φp) +U sin(Φp), (2.20)
where p tracks the geodesic Γ, that is Γ(0) ∼ W1 and Γ(1) ∼ W21, and ∼
stands for the equivalence relation.
The geometry of geodesic construction on real G(2, 1) is illustrated in the
Figure 2.1.
There exists an alternative way of constructing the geodesic on the Grass-
mannian manifold, based on boundary conditions. In [38], the authors
1Let us SVD decompose WH1W2 = L cos (Φ)RH and W1 = U tan (Φ)VH =
W2R1
cos (Φ)LH −W1. Further we know that U is orthogonal to W1, UHW1 = 0.
Thus, we may simplify UHU tan (Φ)VH = UHW2R1
cos (Φ)LH from which we
derive UHW2 = sin (Φ)RH and V = L. We have Γ(1) ∼ W2 if WH2 Γ(1)
is a unitary matrix. Now, WH2 Γ(1) = WH
2W1L cos (Φ) + WH2U sin (Φ) =
R cos (Φ)LHL cos (Φ) +R sin (Φ) sin (Φ) = R, which is unitary. Therefore Γ(1) ∼W2.
29
Page 35
Manifold theory
W2
W1 (W2)
W1(W2)-W1
Figure 2.1. Geodesic construction on real G(2, 1)
obtain the principal angles as WH1W2 = V cos(Φ)TH. And solve (2.20) for
U as
U = [W2T−W1V cos(Φ)] sin(Φ)−1. (2.21)
Unfortunately, for Stiefel and Grassmannian manifolds, both having
more complicated horizontal spaces, a closed-form solution does not ex-
ist.
A geodesic for the Stiefel manifold using a canonical metric is defined
according to [36] as in (2.18), where horizontal space is as in (2.13).
Having only starting point W1, W⊥1 and destination point W2, in or-
der to construct geodesic between these points, it is necessary to find the
unique matrices A and B. To the best of our knowledge, those matrices
cannot be obtained in closed-form. On the other hand, an iterative al-
gorithm for a real manifold using the steepest descend algorithm for the
Stiefel manifold using an Euclidian metric was presented in [39], using
similar tools as in [39], however this time for complex Stiefel manifold
with canonical metric. We construct a cost function as
J(X) = ‖Γ(1)−W2‖2F (2.22)
and we parametrize the skew-hermitian matrix
A =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
jt1 −tL+1 + jtL+2 · · · · · ·
tL+1 + jtL+2 jt2...
...
......
. . . −tL2−1 + jtL2
· · · · · · tL2−1 + jtL2 jtL
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
(2.23)
and arbitrary matrix
B =
⎡⎢⎢⎢⎢⎢⎣
tL2+1 + jtL2+2 · · · tL2+2(Nt−L)−1 + jtL2+2(Nt−L)
.... . .
...
t2NtL−L2−2(Nt−L)+1 + jt2NtL−L2−2(Nt−L)+2 · · · t2NtL−L2−1 + jt2NtL−L2
⎤⎥⎥⎥⎥⎥⎦.
(2.24)
30
Page 36
Manifold theory
As a result, there are 2NtL − L2 real parameters. The steepest descend
algorithm requires the gradient of a cost function J(X), which we express
as
∂J(X)
∂tk= 4TrRe
((Γ(1)−W2‖)H
[W1W
⊥1
] ∂ exp(X)
∂tkIL
), (2.25)
where partial derivative of exp(X) may be computed according to [40] as
∂ expX
∂tk=
∫ 1
0exp(1− u)
∂X
∂tkexp(uA)du. (2.26)
A similar approach can be applied for the Flag manifold. The cost function
can be expressed as
J(X) = ‖WH2 Γ(1)� Γ(1)HW2 − I‖2F , (2.27)
where � is the symbol for the Hadamard product and the partial deriva-
tive is then
∂J(X)
∂tk= 4TrRe
((E�EH − I)(E� ∂Γ(1)H
∂tkW2 +WH
2
∂Γ(1)
∂tk�EH)
),
(2.28)
where E = WH2 Γ(1) is a cross-product between the desired and current
destination of the geodesic. The partial derivative ∂Γ(1)∂tk
is computed in the
same way as in equation (2.26). Now we are able to construct geodesics
on all three manifolds.
31
Page 37
Manifold theory
32
Page 38
3. MIMO channel properties andestimation
Knowledge of channel propagation conditions is crucial to wireless sys-
tem design; when tuning a channel estimator or designing CSI feedback.
While in particular scenarios, designed feedback may work well, in other
scenarios it might be inaccurate. For example, with cross-polarization an-
tennas, in a line-of-sight (LoS) propagation model, horizontal and vertical
polarization fades identically, while in non-line-of-sight (NLoS) , polariza-
tions fade independently. Therefore, when designing a codebook for LoS
propagation conditions, fixing a cross-polarization combiner reduces feed-
back overhead.
In the following, section 3.1 introduces channel models used across our
publications. In section 3.2, we introduce the principles of pilot-based
channel estimation in LTE. The last two sections (3.5 and 3.4) are dedi-
cated to channel estimation with eigenbeamforming in TDD systems and
with spatial precoding and user-specific reference symbols in FDD sys-
tems.
3.1 Channel models
Across publications we considered different channel models. In PI and
PII, we assumed the most simplistic channel model for Nt transmit and
Nr receive antennas, where each channel component is independent and
identically distributed (IID). A MIMO channel matrix of size Nr ×Nt is
H =1√2
⎡⎢⎢⎢⎢⎣
h1,1 . . . h1,Nt
... hr,t...
hNr,1 . . . hNr,Nt
⎤⎥⎥⎥⎥⎦ , (3.1)
where hr,t ∼ N (0, 1) + jN (0, 1) and the covariance matrices are Rt =
E[HHH] = INt and Rr = E[HHH] = INr . The random matrix HHH =
33
Page 39
MIMO channel properties and estimation
QΛQH can be decomposed using economical singular value decomposi-
tion, where Q is a semi-unitary matrix of dimension Nt × Nr. We as-
sume that Nr < Nt, which is typical in practice. Since the above random
matrix H is an independent isotropically distributed (IID), Q is as well
isotropically distributed and [41] showed that all isotropically distributed
semi-unitary matrices of dimension Nt ×Nr are uniformly distributed on
the Stiefel manifold ST (Nr, Nt) defined in (2.2). The above channel model
models a non-coherent MIMO Rayleigh fading channel, with the assump-
tion that the channel is constant during the duration of the symbol period
and its realization changes from symbol to symbol. This model allows us
to express open-loop capacity [41]. In PI we applied a Kronecker model on
top of a IID channel, to model spatial correlation. The overall covariance
matrix is expressed by the Kronecker product between the transmit and
receive covariance matrices R = Rt ⊗ Rr and the transformed channel
becomes H = R1/2vec(H). Alternatively, a correlated channel can be con-
structed as well as by multiplication with the partial transmit and receive
covariance matrices H = R1/2r HR
1/2t , and if the diagonal elements of Rr
are all ones, it can be shown that
E[HHH] = E[RH/2t HHRrHR
1/2t ] = Rt, (3.2)
and similarly E[HHH] = Rr. The Kronecker channel model tends to in-
crease the channel’s degrees of freedom (DoF) leading to overestimation
of capacity [42].
The channel covariance matrix Rt resp. Rr was modeled for horizontal
Uniform linear array (ULA) using an exponential model used for instance
in [43]. The correlation matrix is expressed as
Rt =1√2
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
1 ρ1 ρ2 · · · ρNt−1
(ρ∗)1 1 ρ1 · · · ρNt−2
(ρ∗)2 (ρ∗)1 1 · · · (ρ∗)Nt−3
......
... . . . ...
(ρ∗)−(Nt−1) (ρ∗)−(Nt−2) (ρ∗)−(Nt−3) · · · 1
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦, (3.3)
where correlation ρ = rejθ, r expresses the strength of the correlation
between neighboring antennas and θ expresses the spatial direction of
the correlation. In PII, the θ is uniformly distributed between 0 and 2π. It
guarantees that the channel is isotropically distributed in the azimuthal
angular domain.
34
Page 40
MIMO channel properties and estimation
The more complicated are geometric/spatial channel models, such as the
generic WINNER model [23]. This model is used for system performance
evaluation in wireless standards, such as 3GPP LTE. A brief description
of the main modeling points is summarized briefly in the following:
• At the beginning, large-scale-parameters (LSP) like delay spread or an-
gular spread are selected.
• N clusters are dropped, modeling reflectors with specific delay.
• N powers are drawn from a distribution and ordered. The strongest
power is assigned to the cluster with the smallest delay.
• For each cluster, the angle of arrival (AoA) and angle of departure (AoD)
is drawn as a function of cluster power and angular spread. Each cluster
has M rays. The channel per cluster is generated as a sum of all rays.
• The two strongest clusters are divided each into three sub-clusters.
• Concerning the spatial properties of the channel, a polarization coeffi-
cient is drawn, which corresponds to the leakage of one polarization at
the transmitter to other polarization in the receiver.
• The angular shifts at each receive/transmit antenna are dependent on
AoA and AoD of each ray.
• The channel fading is a function of Doppler frequency, which is a func-
tion of terminal speed, AoA and direction of travel.
Obviously, this channel model is difficult to use in analytical modeling,
on the other side it models propagation conditions more precisely com-
pared to the Kronecker model. These full geometric models have been
used for performance evaluation across all our publications instead of PI
and PII.
The geometric model from [23] has been further extended to a full 3D
channel model [44], explicitly modeling multi-path propagation also in the
elevation domain. This full 3D channel model is essential for studies of
Massive MIMO [45], marketed in LTE as full-dimension FD-MIMO [46].
35
Page 41
MIMO channel properties and estimation
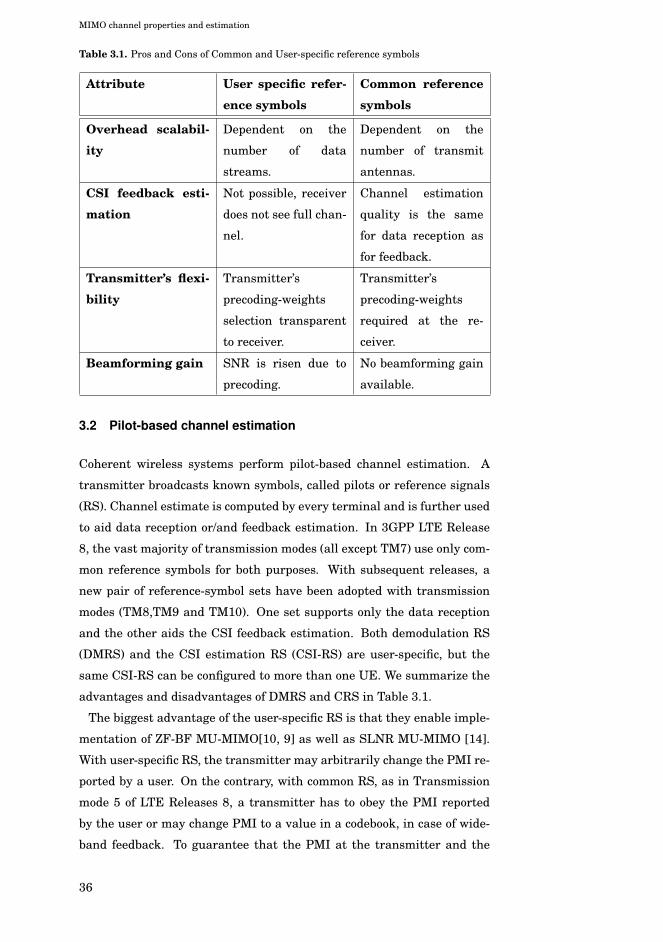
Table 3.1. Pros and Cons of Common and User-specific reference symbols
Attribute User specific refer-
ence symbols
Common reference
symbols
Overhead scalabil-
ity
Dependent on the
number of data
streams.
Dependent on the
number of transmit
antennas.
CSI feedback esti-
mation
Not possible, receiver
does not see full chan-
nel.
Channel estimation
quality is the same
for data reception as
for feedback.
Transmitter’s flexi-
bility
Transmitter’s
precoding-weights
selection transparent
to receiver.
Transmitter’s
precoding-weights
required at the re-
ceiver.
Beamforming gain SNR is risen due to
precoding.
No beamforming gain
available.
3.2 Pilot-based channel estimation
Coherent wireless systems perform pilot-based channel estimation. A
transmitter broadcasts known symbols, called pilots or reference signals
(RS). Channel estimate is computed by every terminal and is further used
to aid data reception or/and feedback estimation. In 3GPP LTE Release
8, the vast majority of transmission modes (all except TM7) use only com-
mon reference symbols for both purposes. With subsequent releases, a
new pair of reference-symbol sets have been adopted with transmission
modes (TM8,TM9 and TM10). One set supports only the data reception
and the other aids the CSI feedback estimation. Both demodulation RS
(DMRS) and the CSI estimation RS (CSI-RS) are user-specific, but the
same CSI-RS can be configured to more than one UE. We summarize the
advantages and disadvantages of DMRS and CRS in Table 3.1.
The biggest advantage of the user-specific RS is that they enable imple-
mentation of ZF-BF MU-MIMO[10, 9] as well as SLNR MU-MIMO [14].
With user-specific RS, the transmitter may arbitrarily change the PMI re-
ported by a user. On the contrary, with common RS, as in Transmission
mode 5 of LTE Releases 8, a transmitter has to obey the PMI reported
by the user or may change PMI to a value in a codebook, in case of wide-
band feedback. To guarantee that the PMI at the transmitter and the
36
Page 42
MIMO channel properties and estimation
receiver is identical, the transmitter sends one bit over the control chan-
nel to confirm successful reception of the user’s PMI feedback in case of
sub-band feedback, and the PMI index in case of wide-band allocation.
Figure 3.1 shows an example of LTE RS symbols in a one time-frequency
resource block. DRS corresponds to the dedicated/user-specific RS of sin-
gle ports in TM7, CRS to four ports of common RS and DMRS to two ports
of the dedicated/user-specific RS in TM9 and TM10. The RS are designed
sparsely to decrease overhead. Therefore, channel estimators have to per-
form channel interpolation.
The OFDMA channel estimate is often obtained by 2D Wiener filtering
of a 2D pilot grid in symbol-frequency domains, as shown in Figure 3.1.
Wiener filtering in the context of OFDMA channel estimation was studied
e.g. in [47, 48, 49]. The solution for 3D Wiener filtering in spatial-time-
frequency domains has been proposed in [50]. Obviously, the spatial do-
main interpolation between antennas is possible only if there exists non-
zero correlation between them. The complexity of the Wiener channel
estimation can be decreased by performing cascaded 1D channel estima-
tions, as suggested e.g. [47].
0 6time slot #0 0 6time slot #1
Freq
uen
cy d
omai
n-1
PR
B
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
D
D
D
DRS
D
D
D
D
D
D
D
D
D
D
D
D
D
D
DMRS
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
CRS
CRS CRS
CRS
CRS CRS
CRSCRS
CRS
CRS
CRS
CRS
CRS
CRS
CRS
CRS
CRS
CRS
CRSCRS CRS
CRS
CRS
CRS
DRS
DRS
DRS
DRS
DRS
DRS
DRS
DRS
DRS
DRS
DRS
DMRS
DMRS
DMRS
DMRS DMRS
DMRS DMRS
DMRS
DMRSDMRS
DMRS
Figure 3.1. User-specific reference symbol layout in downlink transmission mode 7 (DRS)and transmission modes 8,9,10 (DMRS 2 ports).
Precoder selection flexibility at the transmitter, is important as well for
MIMO precoding in reciprocal system, such as TDD. As mentioned earlier,
the first transmission mode using the DRS user-specific reference symbols
was TM7. This mode is intended for single-layer transmission based on
angle of arrival using TDD reciprocity. While, FDD closed-loop transmis-
sion modes using up to 8 layer DMRS user-specific reference symbols were
TM8, TM9 and TM10 in later releases.
37
Page 43
MIMO channel properties and estimation
3.3 System model
We consider the orthogonal frequency division multiple access (OFDMA)
downlink system. With a single transmit and receive antenna, a vector x
of Ns symbols is transformed by inverse Fast Fourier Transform (FFT) to
time domain. The time domain symbol xt is extended by the Cyclic prefix
(CP) xt = [cTt xTt ]
T and sent over the multipath channel ht. The received
signal yt is then a convolution of the channel response and transmitted
signal, i.e. yt = ht ∗ xt. If the channel response is no longer than the
duration of the CP, the time domain received signal yt transformed by
FFT to frequency, becomes a product between the channel frequency re-
sponse and transmitted symbols. Thus, we may rewrite the system model
in simplified form at each sub-carrier n as y = hx + η. For a transmitter
comprising Nt antennas and receiver Nr antennas, a simplified system
model at sub-carrier n can be expressed as
y = HWx+ η, (3.4)
where y is the received signal tall vector of dimension Nr × 1, W is the
spatial precoding matrix of dimension Nt × L and x is a tall vector of
L symbols transmitted simultaneously at the single frequency-time re-
source. The transmit power is limited to Tr(E[xxH]) = Pt and spatial
precoder is unitary WHW = I.
3.4 Channel estimation with Eigenbeamforming
With introduction of the user-specific reference symbols, user-specific chan-
nel starts to be dependent on the precoding weights used by a transmitter.
In case the same precoding weight w is used over the scheduled band-
width, the frequency correlation ρf [Δn] of the channel between two sub-
carriers of distance Δn does not change. We assume that each hi channel
component of a channel h[n] = [h1, h2, . . . , hNt ], where n ∈ [1, Nsc], has
frequency correlation ρhif [Δn] and ||w||2F = 1. The frequency correlation of
equivalent channel h = hw components ρhj
f [Δn] = ρhif [Δn], if channel com-
ponents are identically and independently distributed. In practice, the
applied spatial precoder may attenuate the path and, as such, suppress
the frequency selectivity of the channel. This results in higher channel
correlation.
Contrary to this, if precoding weights change from sub-carrier to sub-
38
Page 44
MIMO channel properties and estimation
carrier, the phase and amplitude correlation in the frequency domain may
change more rapidly. An example of a fast changing precoding is Eigen-
beamforming, where the main singular vector v1 of the Nr × Nt dimen-
sional channel H[n] at sub-carrier n with Lmax = min(Nt, Nr) layers is
used for precoding, where
H[n] =[u1 · · · uLmax
]⎡⎢⎢⎢⎢⎣
λ1 0 0
0. . . 0
0 0 λLmax
⎤⎥⎥⎥⎥⎦
⎡⎢⎢⎢⎢⎣
vH1...
vHLmax
⎤⎥⎥⎥⎥⎦ . (3.5)
An equivalent channel h after Eigenbeamforming (i.e. setting w = v1) for
L = 1 layer therefore becomes
h = u1λ1ejϕ, (3.6)
where u1 and λ1 are deterministic due to the realization of the channel
and ϕ can be chosen arbitrarily with respect to capacity. Selection of ϕ
is however not invariant to channel estimation at the receiver. In PVII
we addressed ϕ optimization in that context. The baseline solution which
comes immediately to mind is fixing the phase of the first equivalent chan-
nel component h1 to a real number by setting ϕ = −∠(u1(1, 1)), referred
in PVII as Method 1. This method is not the most optimal solution to the
problem. In PVII, an alternative method is suggested. This method’s goal
is to minimize channel change between two neighboring sub-carriers n
and n− 1, defining the cost function
Jn(θ) = argmin ||h[n]− h[n− 1]ejϕ[n]||2. (3.7)
Rewriting the above cost function Jn(θ) using a trace we obtain
Jn(θ) = argmaxTr{h[n]h[n− 1]He−jϕ[n] + h[n]hH[n− 1]ejϕ[n]}, (3.8)
which is maximized, if both expressions are real, i.e. when
ϕ[n] = ∠Tr{h[n]h[n− 1]H}. (3.9)
This method is referred to as the Eigenbeamforming Method 2. Firstly,
the transmitter computes the equivalent channels per each sub-carrier
using eigenvector decomposition. In the second step, the transmitter cor-
rects the overall phases ϕ[n] within the scheduled band. In order to bench-
mark these two methods we define the discrete frequency auto-correlation
function of channel component i as
ρf [Δn] = En[hi[n]h∗i [n+Δn]], (3.10)
39
Page 45
MIMO channel properties and estimation
−100 −50 0 50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Δn [15kHz]
|ρ|[-]
Channel component H(1,1)
Eq. channel component heq (1,1)
Eq. channel component heq (2,1)
Figure 3.2. The correlation in frequency - Method 1. Solid line corresponds to the corre-lation of unprecoded channel tap, and dashed lines correspond to the correla-tion of channel taps of the equivalent channel.
which depends on the power-delay-profile of a channel [47, 48].
Figure 3.2 shows the absolute value of frequency-correlation for the
equivalent channel h of dimension Nr = 2, L = 1 corrected using Method 1.
The selected channel model is SCM urban macro. The correlation of the
first channel component is bigger and the correlation of the second chan-
nel component is smaller than the correlation of clean/non-precoded chan-
nel component. This asymmetry is undesirable, because two different fil-
ters would need to be pre-computed at the user equipment. Computation
of filters is a costly operation. Figure 3.3 shows the absolute value of
auto-correlation for the equivalent channel corrected by Method 2. Now
both, the first as well as the second component of the equivalent channel,
have identical correlation functions. Moreover, for both, the correlation is
higher than that of the original channel components. Method 2 requires
as well more complexity in the second step when ϕ[n]’s are computed.
However, this complexity is on the transmitter side and it is less of an
issue.
To further benchmark these two methods. We have measured the chan-
nel estimation error. As a metric we have chosen channel power to esti-
mation MSE, M =||h||2F||e||2F
. The function of geometry is shown in Figure 3.4.
Both two methods are benchmarked using theoretical Real (REAL) and
40
Page 46
MIMO channel properties and estimation
−50 0 50 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Δn [15kHz]
|ρ|[-]
Channel component H(1,1)
Eq. channel component heq (1,1)
Eq. channel component heq (2,1)
Figure 3.3. The absolute number of correlation in frequency - Method 2. Solid line ex-presses original channel tap and Dashed lines correspond to channel taps ofequivalent channel.
Complex (CMPL) correlation functions, as well as their own method-specific
measured correlation functions (MTH1/MTH2) from Figures 3.2 and 3.3.
Irrespective of correlation function used for filter construction, Method 2
performs superior.
Yet another method, often used in practice, rotates eigenvector v1 such
that its first component becomes a real number, i.e. ϕ = −∠(v1(1, 1)).Benchmarking of Method 3 against previous methods is depicted on Fig-
ures 3.5 and 3.6 that show the measured correlation ρf [Δn], absolute
value and angle, as a function of sub-carrier difference Δn. Correlation
was measured on a generic WINNER II UMaNLoS channel model. The
performance of the two methods, Method 1 and Method 2, is comparable
to the performance shown in Figures 3.2 and 3.3 from PV II. The equiva-
lent channel h correlation of Method 3 is significantly lower than the one
of Method 2. The higher the correlation is, better the channel estimator
may average out the noise. Moreover, it is obvious from Figure 3.6 that
Method 3 adds additional phase change to the equivalent channel.
The Methods 1-3 were introduced only for a single transmitted layer. In
case more layers are transmitted to the user at the same time, each layer
can be treated separately according to the above principles.
41
Page 47
MIMO channel properties and estimation
0 5 10 15 205
10
15
20
25
30
35
Geometry [dB]
M[dB]
CMPL−Mth2CMPL−Mth1REAL−Mth2REAL−Mth1MTH2−Mth2MTH1−Mth1
Figure 3.4. Channel power to channel estimation error metric as function of user geom-etry with Method 1 and Method 2 Eigenbeamforming.
3.5 Channel estimation of user-specific downlink channel withlimited feedback
In FDD, to perform beamforming or spatial-multiplexing, a CSI feedback
from a receiver is required at the transmitter. Limited CSI feedback can
be in the form of a precoding matrix index (PMI), reported for full band or
sub-band of N sub-carriers. In CRS based transmission modes, eNB has to
signal used PMI or PMI confirmation to the UE in downlink control chan-
nel. Contrary, in user-specific RS-based modes, a user may be scheduled
with an arbitrary transmit PMI (tx-PMI) per sub-carrier. However, it is
beneficial to keep the same PMI over the sub-band, such that the channel-
estimator of the user-specific channel may assume channel statistics to be
constant within that band. In LTE, the smallest scheduling unit is a PRB,
i.e. 12 sub-carriers. Studying the performance of channel estimation with
one PRB tx-PMI granularity, it has been noted that the channel estimator
suffers from the so called edge-effect. The edge-effect is depicted in Fig-
ure 3.7, where angle discontinuities occur due to the change of PMI. The
channel estimator may not perform noise smoothing across PRBs. As a
solution to this problem PRB bundling was introduced in 3GPP Release
10 for TM10 (TS36.211). It sets the minimum scheduling unit to be of at
least 3PRB (in case of 10MHz system bandwidth). PRB bundling guaran-
42
Page 48
MIMO channel properties and estimation
0 10 20 30 40 50 60 70 80 90 1000.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Δ n [15kHz]|ρ
| [−
]
heq(1,1) − Method 1
heq(1,1) − Method 2
heq(1,1) − Method 3
heq(2,1) − Method 1
heq(2,1) − Method 2
heq(2,1) − Method 3
Figure 3.5. Measured correlation absolute value for all three methods and Winner IIUMaNLoS channel
0 10 20 30 40 50 60 70 80 90 100−0.2
0
0.2
0.4
0.6
0.8
1
Δ n [15kHz]
∠ρ
[rad]
heq(1,1) − Method 1
heq(1,1) − Method 2
heq(1,1) − Method 3
heq(2,1) − Method 1
heq(2,1) − Method 2
heq(2,1) − Method 3
Figure 3.6. Measured correlation angle value for all three methods and Winner II UMaN-LoS channel.
tees that PMI remains constant over the allocated band, which sets the
number of edges to two per scheduling unit.
There exists a better solution than PRB bundling to provide a smooth
channel over the allocated bandwidth. A geodesic interpolation at the
transmitter may smooth out the equivalent channel, while precoding gain
from limited-feedback is preserved or even improved.
Interpolation of channel state information (CSI) is a well investigated
subject. Linear interpolation for beam-forming vectors has been intro-
duced in [51] to reduce multi-input-multi-output (MIMO) precoding feed-
back. While fed back PMs are semi-unitary matrices, i.e. elements in the
Stiefel manifold; often PM performance comes from a Grassmannian in-
43
Page 49
MIMO channel properties and estimation
0 100 200 300 400 500 600−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
n
∠[ h
(1,1
)]
Angle discontinuity
Figure 3.7. Channel component angle as function of sub-carrier index. The WINNER IIUMaLoS channel realization precoded by 4tx 3GPP codebook.
terpretation. Interpolation on a Grassmann manifold for an arbitrary PM
has been proposed and investigated in [38], and in [52, 53] CSI geodesical
prediction in the receiver and interpolation at the transmitter has been
used to mitigate the effect of latency and feedback clustering. However,
in all of this mentioned work, the interpolation is targeted to improve the
spatial precoding at the transmitter, which typically brings only small
benefit. Contrary to this, in PIII we have investigated CSI interpolation
in the context of user-specific channel estimation.
Figure 3.8 illustrates the proposed PM interpolation from PIII, which
enables continuous user-specific channel estimation for a demodulation
purposes across the continuously allocated frequency band. A constant
PM is fed-back to the transmitter per cluster and we perform first-order
interpolation between neighboring PMs. The geodesic is constructed be-
tween sub-carriers located in the middles of neighboring clusters.
In PIII we have studied the impact of geodesical interpolation on user-
specific channel estimation for one-layer and two-layer transmission. We
have tried interpolation geodesics on three manifolds from Chapter 2,
namely Grassmannian, Flag and Stiefel manifolds. It turned out that
for channel estimation, Grassmannian and Flag manifold interpolation is
better than Stiefel manifold interpolation, while interpolation on a Flag
manifold better suits the MIMO systems with linear receivers. In PIII
we shown that interpolation may outperform PRB bundling in the con-
text of channel estimation. Figure 3.9 shows how BER performance is
improved compared to PRB bundling. When interpolation is performed at
44
Page 50
MIMO channel properties and estimation
Cluster 1 Cluster 2 Cluster 3 Cluster 4 Cluster 5 Cluster 6
frequency [SCs]
Tran
smit
ted
PM
(ill
ust
rati
ve)
A single PM for all SCs within cluster (3GPP LTE)
Interpolated PM (proposed)
uster 4 ClusClusterter 5 Clu4 5
unsmooth PM results in a small systematic channel estimation error
Figure 3.8. Illustrative example of the proposed interpolated PMs in freq. domain. Theinterpolation enables continuous ch. estimation across the full-band.
0 5 10 15 20 2510−3
10−2
10−1
SINR [dB]
BE
R
3GPP LTE Transmisison mode 9, rank 1, PMI 6PRB granularity
Ideal Ch. Est.Ch. Est. 3PRB − no interpolCh. Est. 50PRB − interpol.
16QAM
64QAM
QPSK
Figure 3.9. Link BER performance with realistic channel estimation using PRB bundlingand geodesical interpolation.
the transmitter, the receiver may perform channel smoothing across the
whole allocated bandwidth. On the other hand, however, PRB bundling
can perform channel smoothing only across 3-PRB chunks.
45
Page 51
MIMO channel properties and estimation
46
Page 52
4. Single-user MIMO feedback
In FDD cellular systems, CSI is quantized at the user terminal and fed
back to the transmitter. For a small number of transmit antennas, typi-
cally less then 10, vector quantization (VQ) is preferred to scalar (SQ), be-
cause VQ is more efficient. However, for a high number of antennas, pre-
coding space grows and large codebooks of high cardinality are required.
Large amount of codewords in a codebook increases prohibitively the PMI
selection complexity, and SQ become more attractive compared to vector
quantization. In case of VQ, CSI is fed back in the form of a precoding
matrix index (PMI). The PMI represents a codeword Wi from a codebook
of codewords C.
The matrix Wi is a unitary matrix preserving the total transmit power.
In addition, the symbols transmitted on vectors of Wi share the total
power equally. Note, that water-filling optimization between layers has
never been considered in LTE due to following reasons: 1) transmission
modes operating on common reference signals would require an extra sig-
naling of selected power offsets; 2) the difference between layers SINR
can be modified as well by applying unitary right rotation WiU as shown
in Eq. (9-10) of [54]. Nevertheless, a transmitter operating with dedicated
reference signals may perform water-filling transparently to the standard.
Furthermore, transmission of layers with different power is essential to
NOMA [3], where power imbalance between layers is required by the non-
linear receiver performing interference-cancellation of the other layer.
The PMI is in LTE accompanied by channel quality index CQI that ex-
presses the highest MCS which results in BLER smaller than 10%. How-
ever, within the scope of this theses, we will discuss mainly PMI design.
We will firstly introduce a system model in Section 4.1. Then we will dis-
cuss in Section 4.2 codebook design for a IID channel and in Section 4.3
we will discuss codebooks for realistic channels and wireless standards.
47
Page 53
Single-user MIMO feedback
4.1 System model
We consider the orthogonal frequency division multiple access (OFDMA)
downlink system as in chapter 3. For a transmitter comprising Nt anten-
nas and a receiver Nr antennas, a simplified system model at sub-carrier
n can be expressed as
y = HWx+ η, (4.1)
where y is the received signal tall vector of dimension Nr × 1, W is the
spatial precoding matrix of dimension Nt × L drawn from a precoding
codebook of size Nc, and x is a tall vector of L symbols transmitted simul-
taneously at the single frequency-time resource. The transmit power is
limited to Tr(E[xxH]) = Pt and the spatial precoder is unitary WHW = I.
4.2 Codebook for IID channels
Section 3.1 introduced a IID channel model for a non-coherent MIMO
Rayleigh fading channel of dimension Nr × Nt. Furthermore, it showed
that a IID channel’s subspace realizations are uniformly distributed on
the Stiefel manifold ST discussed in Section 2.1. The Stiefel manifold
is however not the manifold to be quantized when designing a precoding
codebook. It turns out that for any spatially precoded communication sys-
tem, irrespective of a receiver implementation, the spatial-precoder for
each layer is invariant to overall phase ambiguity. Such an equivalence
class is expressed as a Flag manifold FL(Nt, L) . When a non-linear re-
ceiver is employed then maximum channel rate is invariant to subspace
rotation, and precoding space can be described by a Grassmannian mani-
fold G(Nt, L), as discussed in Section 2.1.
Quantizing the Grassmannian manifold G(Nt, 1) in order to find an op-
timal beamforming codebook of N entries was suggested for the first time
in [55], and lower bounds on the distortion-rate for a Grassmannian man-
ifold quantizer were derived in [56]. In [55], the authors firstly define a
good beamforming codebook C design as
minC
maxi,j,i �=j
| < wi,wj > |, (4.2)
where | < wi,wj > | expresses the absolute value of inner-product be-
tween unitary vectors being precoding vectors. Secondly, the authors no-
tice that minimizing the maximal inner product in equation (4.2) is simi-
48
Page 54
Single-user MIMO feedback
lar to maximizing the minimal chordal distance between two vectors
dc =√1− | < wi,wj > |2, (4.3)
which is also called packing of Grassmann manifolds. They parametrize
a complex vector by a real matrix. The packings of a real matrix have
been discussed in detail in [57]. Having similarity between inner product
and chordal distance, it can be easily shown that other distace-metrics,
such as Fubini-Study and Projection two-norm, used in packing equation,
produce similar results.
Equivalence between the above mentioned distance metrics does not
hold anymore, when the number of transmitted layers is greater than
one L > 1. In this case, selection of the distance metric used for packing
is not straightforward anymore. This issue was studied in [58], where the
authors suggest two different metrics for two different groups of receivers.
The first metric is a projection two-norm distance, which is according to
[58] suitable for systems with an ML-receiver, the MMSE-receiver with a
cost function equal to the trace of mean-square error (MSE) between the
transmitted and received symbol. The projection two-norm distance
dproj =√1− λ2
minWH1W2 (4.4)
maximizes the minimum eigenvalue of a channel and thus minimized
probability of error.
The second suggested metric is Fubini-Study (FS) distance, which is
suitable for communication systems with an MMSE receiver with a cost
function equal to the determinant of the MSE between the transmitted
and received symbol. FS distance is suitable for systems maximizing ca-
pacity or rate of a system. The Fubini-Study distance is defined as
dFS = arccos | det(WH1W2)|. (4.5)
In case we want to maximize the received power of a system, the code-
book should be packed with chordal distance
dc =√L− ‖WH
1W2WH2W1‖2F . (4.6)
The other metric on a Grassmann manifold can be found in [59].
In case of LTE, the cost function is the rate of the system. The rate
is a function of the post-processing signal-to-interference-and-noise-ratio
SINR. The rate function is an envelope across all modulation and coding
classes (MCSs) of a transmission system. An LTE throughput envelope
for 26 MCS classes ranging from −3dB to 17dB can be seen e.g. in [54].
49
Page 55
Single-user MIMO feedback
In [58], the authors additionally claim that for systems with an MMSE
receiver, the optimal non-quantized precoder is equal to the right singular
space of the instantaneous channel matrix and it is invariant to rotation
by the unitary group, i.e. Wopt = VRU, where H = VLΛVR and U ∈ U.
Rotation ambiguity U does not however hold, when a MIMO system max-
imizes its rate using a linear receiver. In this case, the optimal precoder is
unique Wopt = VR and the rate of the system is dependent on the U ∈ U .
It has been proven in PI that the rate of a system with a linear receiver
is smaller than the rate of a system with a ML receiver, and is equal only
when Req is diagonal, i.e. when the channel is orthogonalized.
The rate of the system with a linear receiver is expressed as
R =
L∑l=1
log2(1 + SINRl), (4.7)
where the post-processing signal-to-interference-noise-ratio of layer l is
SINRl =1
[γReq − aIL]−1l,l
− 1, (4.8)
where we set a = 1 for the MMSE receiver, a = 0 for the ZF receiver and
γ =ηsymLσ2 is the signal-to-noise ratio.
Figure 4.1 illustrates rate R in (4.7) of the system at SNR of 10dB, using
W = VR and parametrization of a 2× 2 unitary group
U2×2(θ, φ) =
⎡⎣ cos(θ) sin(θ)
sin(θ)ejφ − cos(θ)ejφ
⎤⎦ . (4.9)
It can be seen that the maximum is obtained at θ = 0, which defines an
identity matrix. And with an identity matrix, performance is invariant to
the value of φ. The rate-gain between non-orthogonalized and orthogonal-
ized channel transmission is around 10% for this particular realization.
Further, we illustrate in Figure 4.2 one realization with quantized pre-
coder from a codebook CN of 4-bit size, i.e. W �= VR. Due to quantization
error, optimal θ �= 0 and φ �= 0. The gain between non-orthogonalized and
orthogonalized channel transmission is also around 10%.
This gain presented in Figure 4.1 and 4.2 is called orthogonalization
gain, firstly observed in PI and later studied in [54], where gain approxi-
mation for a 2× 2 MIMO system has been derived as
G =(λ1 + λ2)
2
4λ1λ2. (4.10)
Therefore, orthogonalization gain varies as a ratio of channel singular
values λ1 and λ2 and if λ1 = λ2, gain is equal to 0dB.
50
Page 56
Single-user MIMO feedback
02
46
8
00.5
11.5
28.4
8.6
8.8
9
9.2
9.4
9.6
9.8
10
φθ
Rat
e of
the
syst
em [b
it/H
z/s]
Figure 4.1. Rate of the system as a function of unitary group with optimal non-quantizedprecoder.
Observing Figure 4.2, reveals yet another property of orthogonalization
codebook, two maximum peaks. These two peaks indicate that a good
codebook shall be invariant to column permutation(s). In PI, we thus
separated the spatial precoder W into two parts
W = GNt×L ×OL×L, (4.11)
where G ∈ G(Nt, L), O ∈ O(L) and O(L) is the Stiefel manifold invariant
to permutation P(L) and invariant to the overall phase of each column.
Thus, O(L) is a coset-space expressed as
O(L) = U(L)/(P(L)× U(1)L). (4.12)
4.2.1 Orthogonalization codebooks
In PI, we have defined a parametrization of O using Givens rotors R(k, l)
as defined in [60]
O(L) =
L−1∏k=1
L∏l=k+1
R (k, l), (4.13)
where each R(k, l) is a L × L unitary matrix, which coincides with the
identity matrix except in the four matrix elements that lie at the crossings
of columns k, l and rows k, l. These four matrix elements are given by
the elements in the 2 × 2 unitary matrix Rkl = U2×2(θkl, φkl) from (4.9).
The non-equivalent orthognalizations are fully represented by the set ofNs!
2!(Ns−2)! matrices Rkl.
51
Page 57
Single-user MIMO feedback
02
46
8
00.5
11.5
29.2
9.4
9.6
9.8
10
10.2
10.4
10.6
φθ
Rat
e of
the
syst
em [b
it/H
z/s]
Figure 4.2. Rate of the system as a function of unitary group with precoder from a 4bitcodebook.
Unlike a Householder representation ofO [61], using independent groups
with unequally distributed degrees of freedom, Givens parametrization is
a set of equally-sized independent groups Rkl with parameter ranges [62]
0 < cos(θkl) < 1 and 0 < ϕkl < 2π.
In addition, each Rkl may further be expressed as the projective space
CP1 of lines in C2, fully defined by the first column vector of the unitary
matrix Rkl. Note that the projective space is a representation of the com-
plex Grassmann manifold G(2, 1) which is isomorphic to the real sphere
S2(θ, ϕ), where ϕ = 2θ.
For the complex Grassmann manifold G(2, 1), there exists an isometrical
embedding into the Riemann two-sphere S2 and that isometry holds also
between our complex projective space and the sphere embedding. The
principal angle between two points on the complex projective space corre-
sponds to half the angle between projected points on the real sphere.
To summarize: in the paragraphs above we described the O as a set ofL!
2!(L−2)! real 2-spheres.
On the real 2-sphere, unitary matrix permutation is an antipodal point,
because the principal angle of 90 degrees corresponds to 180 degrees on
the real sphere. Thus, finding the best quantization of O(L = 2) is equal
to quantizing only one hemisphere, see Figure 4.3. The antipodal sphere
packing results from e.g. [57] can be used.
Higher dimensional O(L > 2) quantization is a packing problem of
52
Page 58
Single-user MIMO feedback
L!2!(L−2)! independent S2 spheres respecting the permutation ambiguity.
The elimination of permutations is a topic for further study, however
transmissions of more than two layers are rare in LTE.
Figure 4.3. Upper hemisphere of real 2-sphere illustrating the parametrization
Table 4.1 presents three optimal orthogonalization codebooks for two
transmitted layers L = 2. The optimal 1-bit codebook is constructed from
the 3GPP UMTS mode-1 2-bit codebook, removing the antipodal entries.
The optimal 1.5-bit codebook is rank2 3GPP LTE Release 8 codebook.
However identity cannot be reported, because in case of rank override,
antenna selection is not a valid rank 1 codeword. The optimal 2-bit code-
book consists of the upper four corners of the cube fitted to the sphere,
resulting from anti-podal sphere packings in [57].
4.2.2 Grassmanian codebooks
The Grassmannian codebooks for channel sources uniformly distributed
on the Grassmannian manifold, are obtained by manifold packings. Pack-
ings of N codewords being part of a codebook CoptN are obtained by finding
a codebook C maximizing minimum distance d between all pairs of code-
words, i.e.
CoptN = max
∀CN⊂Gmin
Wi,Wj∈CN ,i �=jd(Wi,Wj). (4.14)
Note that packings are not unique, because rotation of all codewords by
unitary matrixU ∈ U(Nt) from left, preserves the distances between code-
words in the codebook.
53
Page 59
Single-user MIMO feedback
Table 4.1. Orthogonalization codebooks for two layer transmission L = 2
n Optimal 1-bit Optimal 1.5-bit Optimal 2-bit
1 1√2
⎡⎢⎣ 1 1
1 −1
⎤⎥⎦
⎡⎢⎣ 1 0
0 1
⎤⎥⎦
⎡⎢⎣ c −s
s c
⎤⎥⎦
2 1√2
⎡⎢⎣ 1 1
j −j
⎤⎥⎦ 1√
2
⎡⎢⎣ 1 1
1 −1
⎤⎥⎦
⎡⎢⎣ c js
js c
⎤⎥⎦
3 1√2
⎡⎢⎣ 1 1
j −j
⎤⎥⎦
⎡⎢⎣ c s
−s c
⎤⎥⎦
4
⎡⎢⎣ c −js
−js c
⎤⎥⎦ c =
√1− s2 = 0.8881
When designing a codebook for single layer transmission, all metrics
presented in equations (4.4), (4.5) and (4.6) are equivalent. For L > 1
distance metrics used for packings shall be used with respect to wireless
system design.
Packings CoptN can be obtained by several algorithms besides a brute force
algorithm. Packings in real Grassmannian manifolds were first studied
in [57], and in complex Grassmannian manifolds in [63]. And, alternate
projection packings were introduced in [64] for an arbitrary distance met-
ric. Codebook design by vector quantization using Lloyd algorithm was
introduced in [65, 66]. The Lloyd algorithm is simple, consisting of sev-
eral steps:
1. Generate initial codebook CN ⊂ G of N codebooks.
2. Generate the training set of M matrices/vectors Tm ∈ T ⊂ G.
3. Sort the matrices in training set T to Voronoi regions Vn, such that
Tm ∈ Vn ⇐⇒ n = arg min∀i∈1,..,N
d(Wi,Tm) (4.15)
4. Find the Centroid for each Voronoi region Vn, which can be computed
as the main eigenbeams of covariance matrix Vn = E[TmTHm].
5. Centroids Vn form a new codebook CN
54
Page 60
Single-user MIMO feedback
6. Iterate to step 2 or 3.
Yet one more algorithm for packing has been introduced in PII. It is
called the Expansion-Compression Algorithm (ECA) and it uses the man-
ifold analogy on 2D max-min algorithm to place points uniformly on a
wrap-around rectangle. At each iteration, the closest codewords in a code-
book CN are moved apart.
ECA algorithm with chordal distance
In the ECA algorithm, straight lines are replaced by geodesics, because
the geodesic expresses the shortest path between a pair of points on a
manifold. The geodesic on a Grassmann manifold can be computed ac-
cording to [37], while an alternative computation can be found in [67].
Across our publications we have used geodesic computation according
to [37]. A line is a geodesic, if the curvature vector projected to tangent
space at every point of the line is zero [68]. For example, on the upper
hemisphere of two-sphere S2, illustrated in Figure 4.3, a latitude other
than the equator is not a geodesic.
The squared chordal distance d2c on the geodesic from W1 to Γ(p) is a
function of parameter p
d2c(p) = s−s∑
i=1
(cos2Φiip), (4.16)
where Φii are principal angles between the boundaries of a geodesic W1
and W2.
We define two points being in degenerated constellation, if by tracing
geodesic p > 1, the chordal distance between starting boundary W1 and
interpolate p > 1 decreases even though it did not reach the maximum dis-
tance. One example would be when L = 2 and singular values of WH1W2
are cosΦ11 = 0 and cosΦ22 = 1.
If the points in the degenerated constellation are simultaneously the
pair with the minimum distance, the expansion algorithm incorrectly de-
creases their distance instead of increasing, and the algorithm does not
converge to optimal solution. We avoid the degenerated constellations
by employing the min-max algorithm, i.e., compression. To obtain effi-
cient packings, it is important to balance both compression and expan-
sion steps. For a large compression step, maximum tends to converge
under Rankin bound [69]. For the opposite case of a small compression
step, the packings tend to converge into degenerated constellation. Em-
pirically, we set the compression step to a fraction of the expansion step
55
Page 61
Single-user MIMO feedback
Δdc = − kKΔde, where k = 1..K is the iteration index. Knowing the dis-
tance step Δd we may solve for the compression pc and expansion pe steps
from
(dc +Δdc) =
√√√√s−s∑
i=1
cos2[arccos (λi)(1 + p)], (4.17)
where λi are the singular values of the cross-product WH1 W2. Unfortu-
nately, (4.17) does not have a solution for p in closed form, but it can be
well approximated by Taylor series expansion of order one around p = 0
or solved iteratively.
Having a geodesic and compression/expansion step, the ECA algorithm
follows:
1. Initialize N random points CN = {W1, ..WN} on G(Nt, L), e.g QR de-
compose the Gaussian random matrix of size Nt × L. Choose the K × 1
vector Δd of distance steps and K × 1 vector m of iterations per step,
and set counter to k := 0
2. Increase the counter, k := k + 1
(a) Expansion: Find the pair of points with minimum distance [Wmin1,Wmin2].
(b) Solve for pe in (4.17) by setting p = pe and Δd = Δd[k], and construct
the expansion geodesic. Move both points apart by setting Wmin1 =
Γ(−pe) and Wmin2 = Γ(1 + pe).
(c) Compression: Find the pair with maximum distance [Wmax1,Wmax2].
(d) Solve for pc in (4.17) by setting p = pc, Δd = − kKΔd[k] and con-
struct the compression geodesic. Move both points together by setting
Wmax1 = Γ(−pc) and Wmax2 = Γ(1 + pc).
(e) Iterate m[k] times to a), save the best packings Ωbest.
3. If k < K Return to 2 and start from the best packing Ωbest = {W1, ..WN},
otherwise stop and report results.
For N > N2t , Rankin bound Ψ does not hold anymore, points cannot be
placed equidistantly on the manifold. Therefore, in an optimal constel-
56
Page 62
Single-user MIMO feedback
lation there exists a pair of points with distance greater than minimum
distance. The compression is in this case not desirable; the steps 2 c) and
d) should be omitted.
ECA variation to Fubini-Study
Contrary to chordal distance, Fubini-Study optimal packings have not
been reported. Theoretical bounds do not exist but some experimental
bounds were introduced in [64]. The ECA packing algorithm with a chordal
distance metric may be reused with further simplifications. With Fubini-
Study, distance-degenerated constellations do not occur, because a zero
singular value of WH1W2 implies maximum distance between W1 and
W2. Thus, we may omit steps 2 c) and d) of the algorithm. Further, we
replace (4.17) by
(dFS +ΔdFS) = arccos
(∏i
cos[arccos (λi)(1 + p)]
). (4.18)
The ECS algorithm is not bounded to the Grassmann manifold only. It
can be extended to other manifolds, e.g. the Stiefel Manifold and Flag
manifold. However, geodesic construction on these manifolds is not as
easy as on Grassmann manifold. See Section 2.2 for more details.
4.3 Codebook design for wireless standards
While IID spatial precoding codebooks are mostly of academic interest.
Non-IID codebooks are part of many closed- as well as few open-loop
transmission schemes used in wireless standards. Due to limited multi-
path propagation, channel components become correlated. For example
in case of line-of-sight between a receiver and transmitter, channel com-
ponents become fully correlated. The correlation impact on the distri-
bution of spatial precoders within the manifold can be demonstrated in
the simplest example of an array with only two transmit antennas and
one receive antenna. With 100% correlation, all the precoding matrices
are mapped at the equator of the 2-sphere illustrated in Figure 4.3. Un-
like with 0% correlation, when channel realizations are spread uniformly
across the surface of the 2-sphere.
LTE spatial-precoding codebooks are designed to be of low complexity.
Every algorithm accepted by standardization community has to be of low-
complexity and bring sufficient gain. For these reasons, several prereq-
uisites exist when designing a codebook in LTE. We summarized these
57
Page 63
Single-user MIMO feedback
perquisites in Table 4.2.
Table 4.2. Design rules for codebooks used in wireless standard.
Rule Properties
Constant modulus
(CM) components
Constant amplitude of components simpli-
fies multiplication between channel matrix
and precoding-matrix components. Further,
it guarantees that each antenna transmits
with equal power. CM simplifies the cost
and efficiency of power amplifiers [13].
Upward nested
property
Each codeword of lower rank is a part of at
least one codeword of higher rank. Calcu-
lations made for lower rank may be re-used
for higher rank.
Downward nested
property
A part of codeword of higher rank is a code-
word of lower rank. Allows rank override
for systems without user-specific reference
symbols.
Discrete phase of
components
Quantized phase (e.g. QPSK) of the com-
ponents simplifies 1) codification of agreed
codebook in standard-specification docu-
ments 2) multiplication with channel com-
ponents. For example, multication of a com-
plex number by j may be performed by flip-
ping real and imaginary part plus a sign
change.
Semi-unitary
codeword matrices
Semi-unitarity of a precoder maximizes re-
ceived power in single-user transmission.
The main goal of codebook design for wireless standards is to find a
set of codewords that provide the best match to the spatial correlation.
Unfortunately, correlation changes with respect to: 1) channel scenario
type, such as Micro Urban, Macro Urban, Rural, etc. 2) the parameters of
an antenna array, such as antenna array layout, polarization and spacing
3) NLoS/LoS realization.
Therefore, the first LTE 4Tx codebook has been designed as a compro-
mise between several scenarios. Eight codewords from the codebook are
intended for correlated Uniform linear arrays (ULA), and the rest of the
codewords are intended for cross-polarized antenna arrays as well as sce-
58
Page 64
Single-user MIMO feedback
narios with very low correlation. The final design of release 8 4Tx 3GPP
LTE codebook was provided by the author in [70]. Table A.2 in [70] has
been standardized in Table 6.3.4.2.3-2 of 3GPP LTE technical specifica-
tion [1].
4.3.1 Adaptive codebooks
Spatial correlation, being a key codebook design factor, is the second or-
der statistic of an instantaneous MIMO channel. It is measured as expec-
tation over time and frequency. Therefore, it makes sense to adapt the
codebook to measured correlation only with low periodicity and over the
full band. There are several methods to adapt a base codebook.
A codebook may be adapted using a square-root of transmit correlation
matrix R [71]
∀i,Wi = R−1/2t Wi, (4.19)
where i ∈ {1, . . . , Nc}. This simple approach however breaks all codebook
design rules specified in Table 4.2. Another way how to adapt a codebook
is to multiply base codewords with a diagonal matrix from left, i.e.
∀i,Wi = UDWi =
⎡⎢⎢⎢⎢⎢⎢⎢⎣
1 0 0 0
0 ejθ 0 0
0 0. . . 0
0 0 0 ej(Nt−1)θ
⎤⎥⎥⎥⎥⎥⎥⎥⎦Wi. (4.20)
This approach rotates codewords towards a specific direction and fulfills
rules from Table 4.2, however it does not compress the codebook to given
correlation. The above transformation matrix is a unitary group, there-
fore, the distances between codewords stay invariant to multiplication by
UD.
Because the above approaches are not suitable for LTE or not fully func-
tional, the standardization community adopted a concept called the Dou-
ble codebook (DCB) which we will describe in detail in the next subsection.
Double codebook for Cross-polarized antennas
The double codebook structures have been studied intensively in 3GPP,
as well as in literature [72], [73] and [74]. In [73] the double codebook
for 8Tx transmit antennas is benchmarked and its wide-band long-term
component W1 is studied in detail. In [72] six different double codebook
designs are thoroughly investigated. These six designs are separated into
59
Page 65
Single-user MIMO feedback
two groups. The first group is of structure W1W2, where W1 is long-
term wide-band block diagonal matrix of grid of beams (GoB). The second
group is of the same structure W1W2, however W1 is a diagonal matrix
from (4.20). The authors in [72] conclude that the structure using GoB is
more suitable for cross-polarized antennas. In [74] channel prediction for
a double codebook is proposed to eliminate the aging of the feedback.
Going into more detail, the double codebook structure consists of two
components. The first component is a long-term and wideband codeword
of index m1 which can be expressed as
W1(m1) =
⎡⎢⎣ B(m1) 0Nt
2×Nb
0Nt2×Nb
B(m1)
⎤⎥⎦ , (4.21)
where,
B(m1) =[bm1 bm1+1 . . . bm1+Nb−1
], (4.22)
m1 ∈ {1, .., N} and bn = [1, ej2πn/N , ej2π2n/N , ..., ej2π(Nt−1)n/N ] is a beam
n from the grid of N beams and is of dimension Nt/2 × 1. Nb denotes
the number of neighboring beams in one codeword . The codebook C1 is
usually common for both, rank-1 and rank-2 transmission.
The second component is a short-term sub-band codeword, which can be
expressed for rank-1 as
W2(m2) =
⎡⎢⎣ sp1
sp2ejθj
⎤⎥⎦ , (4.23)
where sp is a beam selection vector of size Nb × 1 with all zeros and 1 at
the position p. Indexes p1 and p2 refer to beams in two different polariza-
tions. The cross-polarization co-phasing phase θj is quantized to M-PSK
alphabet. Therefore, three indexes (p1, p2, j) define a codeword of index
m2 or vice versa.
The rank-2 short-term sub-band codeword of index m2 can be expressed
as
W2(m2) =
⎡⎢⎣ sp11 sp12
sp21ejθj −sp22ejθjc
⎤⎥⎦ , (4.24)
where an additional co-phasing term is defined as
c = ej{∠(bHp11
bp21 )−∠(bHp12
bp22 )}, (4.25)
which guarantees the orthogonality of the final codeword. The indices
p11, p12, p21 and p22 are beam-selecting indices for each layer and polar-
ization. These four indices and co-phasing phase θj define a codeword of
60
Page 66
Single-user MIMO feedback
index m2 or vice versa. The traditional rank-2 structures are presented in
Table 4.3. In traditional rank-2 codeword designs [72], [73], the constant
modulus co-phasing term c is set to c = 1 and the structures in Table 4.3
guarantee the orthogonality of rank-2 W =W1W2. In Table 4.3, notation⎡⎣ A B
A B
⎤⎦ denotes that in the final codewordW =W1W2, beams for each
polarization are the same and beams for each layer are different.
The structure
⎡⎣ A A
A A
⎤⎦ allows for Nb unique codewords. This type of
structure is invariant to selection of cross-polarization phase θ. The code-
word W2, where p11, p12, p21 and p22 are equal and ∈ {1, . . . , Nb}, can be
factored out to a diagonal matrix multiplied by a unitary matrix from the
right.
W2(m) = DU =
⎡⎢⎣ si 0
0 si
⎤⎥⎦⎡⎢⎣ 1 1
ejθj −ejθj
⎤⎥⎦ . (4.26)
The matrix U is invisible to both, linear and non-linear selection met-
rics from Section 4.2. As a consequence, we set phase θj = 0 for
⎡⎣ A A
A A
⎤⎦
structure type. Similar factorization can be performed for
⎡⎣ A A
B B
⎤⎦ struc-
ture. For the other structure types factorization is not possible and thus
a different phase θj produces always a new unique codeword.
Table 4.3. Traditional rank-2 structures
Trivial bp11 ⊥ bp12 ∧ bp21 ⊥ bp22⎡⎣ A A
A A
⎤⎦ p11 = p21 = p12 = p22
⎡⎣ A B
A B
⎤⎦ p11 = p21 ∧ p12 = p22
⎡⎣ A A
B B
⎤⎦ p11 = p12 ∧ p21 = p22
In PIX we proposed a novel generalized structure, where restriction
|p11 − p12| = |p21 − p22| defines all possible rank-2 constant modulus code-
words that can be constructed for W2. In order to guarantee the rank-
2 codeword orthogonality, the co-phasing term |c| = 1 from (4.25) is re-
quired. The novel structures proposed in PIX increase the number of
unique codewords and therefore allow for better codebook design.
61
Page 67
Single-user MIMO feedback
All W2 codewords can be separated into six structure types listed in the
first column of Table II. The second column of Table 4.4 states the number
of unique codewords per structure type. The number of unique codewords
depends on parameter Nb (number of neighboring vectors in W1) and M
(size of M-PSK alphabet to quantize phase θ).
Table 4.4. All unique rank-2 structures
Orth. property Nb. unique CWs M = Nb = 4
p11 = p12 = p21 = p22 Nb 4
p11 = p12 ∧ p21 = p22 2× C(Nb, 2) 12
p11 = p21 ∧ p12 = p22 M × C(Nb, 2) 24
p11 = p22 ∧ p21 = p12 M × C(Nb, 2) 24
p12 − p11 = p22 − p21 > 1 M ×∑Nb=2
l=1(Nb−1)!(Nb−3)! 32
p12 − p12 = p21 − p22 > 1 M ×∑Nb=2
l=1(Nb−1)!(Nb−3)! 32
The third column in Table 4.4 lists exact numbers of unique codewords
when M = Nb = 4. Altogether, there are K=128 unique rank-2 codewords
to choose from, further in text denoted as Full 7-bit codebook. In case of
M = 8 and Nb = 4, there are 240 different options to choose from. In
PIX we have shown by system-level simulations that a novel structure
improves the codebook performance, especially when distance between
neighboring transmit antennas is larger than 0.5λ.
Double codebook for Uniform-linear antennas
A double codebook design for linear antenna arrays may follow the design
for x-polarized arrays with an extra structural addition of diagonal matrix
D.
W1(m1) =
⎡⎢⎣ B(m1) 0Nt
2×Nb
0Nt2×Nb
B(m1)D(m1)
⎤⎥⎦ , (4.27)
Matrix D is defined as
D(m1) =
⎡⎢⎢⎢⎢⎢⎢⎢⎣
ej2πNtm1
2N 0 0 0
0 ej2πNt(m1+1)
2N 0 0
0 0. . . 0
0 0 0 ej2πNt(m1+Nb−1)
2N
⎤⎥⎥⎥⎥⎥⎥⎥⎦. (4.28)
When two blocks of W1 are combined with W2 = [1, 1]T , the final vector
forms a beam. This guarantees that the narrow beamforming vectors of
an ULA array are present in the codebook.
62
Page 68
Single-user MIMO feedback
Table 4.5. Coverage of the ITU UMa NLOS channel
Nb N Groups Cov. Cfull Cov. Csub
2 8 28 74.8% 75.0%
2 16 120 81.6% 81.4%
2 32 496 84.2% 82.7%
3 8 56 85.7% 85.7%
3 16 560 91.4% 91.1%
3 32 4960 93.1% 92.9%
4 8 70 92.1% 92.0%
4 16 1820 96.6% 96.3%
4 32 35960 97.5% 96.8%
However, when designing a double codebook for an ULA antenna array,
relaxing the constant modulus constraint, one may define
W1 = span[bs1 ,bs2 , . . . ,bsNb], (4.29)
such that the vector of the selected beam indexes s = [s1, s2, . . . , sNb] may
take an arbitrary combination of beam indexes. These beams shall match
multi-path propagation. After thatW2 may be used to coherently combine
these beams.
In PVIII we have investigated how the number of beams Nb and number
of base vectors N impact the coverage of the channel. The coverage C is
defined as the gain using a C(W1) codebook with optimal Wopt2,s relative to
the gain obtained by SVD precoding
C =
∑s Tr[(W1W
opt2,s )
†RsW1Wopt2,s ]∑
s
∑Rk=1 λk
, (4.30)
where λk are the ordered eigenvalues of the channel covariance matrix
Rs for subband s and R is the rank of the codebook. Table 4.5 shows
the channel coverage for an ITU UMa NLOS channel. Cfull corresponds
to the full search within the W1 codebook, while Csub corresponds to the
low-complexity sub-optimal algorithm proposed in PVIII. Note that in the
first row coverage of the suboptimal algorithm is bigger than full coverage.
This happens due to the limited precision of numerical simulation.
Unfortunately, Wopt2,s is not uniformly distributed for the ITU UMa NLoS
channel source. Observing the Wopt2 manifold G(3, 1) on its two G(2, 1)
submanifolds projected on the sphere, we can conclude that the phase
63
Page 69
Single-user MIMO feedback
0 2 4 6 8 10 12 14 160.5
1
1.5
2
2.5
3
3.5x 106
SNR [dB]
Thro
ughp
ut [b
it/s]
SVDLTE L=4 W1(4b),W2(4b)
L=3 W1(7b),W2(4b)L=3 W1(15b),W2(4b)ADP W1(7b),W2 (4b)
(a) R = 1 codebooks: 1, Optimal SVD
codebook 2, Release 10 codebook 3,
Sub-group codebook 4, Full-group,
sub-optimal selection codebook 5,
Adaptive codebook [75].
4 6 8 10 12 14 16 18 20 220
1
2
3
4
5
6x 106
SNR [dB]
Thro
ughp
ut [b
it/s]
SVD
LTE L=4 W1(4b),W2(4b)
L=3 W1(15b),W2(4b)
(b) R = 2 codebooks: 1, Optimal SVD
codebook 2, Release 10 codebook
3, Full-group, sub-optimal selection
codebook.
Figure 4.4. Performance of the proposed double codebook
(longitute) is uniformly distributed, however latitude is not. Codewords
are more concentrated around the north pole. This can be as well noticed
on the covariance matrix measured on the ITU UMaNLoS channel, C =
E[Wopt2,sW
opt2,s
H] = diag[0.43, 0.35, 0.22]. Therefore, we design the codebook
for Wopt2,s as a IID codebook, and by means of goedesic Γ(Wi
2,Eo, p), we
move all codewords Wi2 towards the north pole, i.e. E0 = [1 0 0]T for rank
R = 1 and E0 =
⎡⎢⎢⎢⎢⎣
1 0
0 1
0 0
⎤⎥⎥⎥⎥⎦ for rank R = 2, we set empirically p = 0.15.
In PVIII these codebooks were benchmarked in a 10 MHz bandwidth
3GPP LTE link simulator. We schedule one user to a total of 6 PRBs (phys-
ical resource blocks) located at both edges of the band and in the middle,
each sub-band comprised 2 PRBs. The number of antennas Nt = 8. The
W1 and W2 were both reported with a periodicity of P = 5 subframes (5
ms) being equal to the periodicity of the channel estimation CSI-RS pilots.
The link simulations in Figure 4.4a and Figure 4.4b show that the pro-
posed ULA codebook with relaxed constant modulus restriction may de-
liver significant performance gain, especially in two-layer transmission.
The improvement requires a low-complex algorithm to select the codeword
W1 and the increased feedback overhead of long-term wide-band code-
word W1. It can be further noticed that an adaptive codebook from [75]
performs the worst of all benchmarked codebooks.
64
Page 70
5. Multi-user MIMO feedback
Multi-user MIMO (MU-MIMO) technology is not only an academic re-
search topic. It is reality, which is part of the 4G LTE wireless network
standard. It has been standardized in its first version already in Release
8 and has been improved in consecutive releases. MU-MIMO is a trans-
mit signal processing technique to improve spectral efficiency within the
single-cell. In order to improve efficiency, an MU-MIMO scheduler ex-
ploits the spatial diversity of users and serves them at the same time and
frequency resource. The highest benefits of MU-MIMO are expected in the
cells with a high amount of active users, where the probability of finding
compatible users with large spatial separation is high.
In the following sections of this chapter, we firstly introduce a system
model of a multi-user broadcast channel in Section 5.1. Afterwards, in
Section 5.2, we will introduce three main multi-user strategies, namely: 1)
zero-forcing beam-forming (ZF-BF); 2) generalized eigenvector precoding
(GE) and 3) signal-to-leakage-noise-ratio precoding (SLNR). Afterwards,
in Section 5.3 we compare direct quantization of a normalized covariance
matrix from [19, 20] to separate quantization of eigenvectors and eigen-
values from PII. The chapter ends with Section 5.4, where we discuss
different ways to improve the CSI at the transmitter, which is necessary
for good performance of MU-MIMO. The 2nd and m-th best refinement
techniques, from PVI and PX, are introduced in detail.
5.1 System model
Without loss of generality, we will assume a single-cell broadcast system
with a flat fading propagation channel H. An example of such a system is
a broadcast OFDMA system, where a propagation channel at a single sub-
carrier can be considered flat fading. In the following we omit sub-carrier
65
Page 71
Multi-user MIMO feedback
indexes.
The precoding unit at the eNB, processing the transmit signal for user
k, takes as an input an Rk-dimensional vector sk of the source symbols
and multiplies it with an Nt ×Rk precoding matrix Wk. On each of these
Rk layers an independently modulated and coded data stream may be
transmitted. Note that the same power is allocated to all layers. The
equivalent transmission equation of the data symbols of user k is thus
given by
yk = HkWksk +∑i �=k
HkWisi + nk (5.1)
whereHk is the kth user MIMO channel of the rank min(Nt, Nr),Wk is the
precoding matrix corresponding to symbols sk intended for user k; and n is
the noise vector whose entries have a IID complex Gaussian distribution
with zero mean and variance σ2. The received signal by user k is yk and
has dimensions Nr × 1 and the dimensions of sk being Rk × 1.
The symbols si, precoded by matrices Wi and intended for co-scheduled
users i, are treated as co-channel interference (CCI) Hkwisi. This CCI
cannot be removed by a simple receiver, such as a maximum-ratio-combining
(MRC) receiver. However, CCI may be suppressed at the receiver by a lin-
ear receiver, such as MMSE, when Nr > Rk. In case Nr = Rk, only a
non-linear receiver, such as maximum-likelihood (ML) or succesive inter-
ference cancellation (SIC), can remove CCI.
5.2 MU-MIMO transmit processing
An ultimate multi-user broadcast strategy called Dirty paper coding (DPC)
has been introduced already in 1983 by Max Costa in [76]. When a trans-
mitter knows what interference it causes to the users i, it can precom-
pensate this interference from the transmitted signal intended for user
k. The DPC rate region coincides with the capacity region of a multi-user
MIMO broadcast channel [77]. This fact makes DPC an attractive trans-
mit strategy. Unfortunately, the DPC scheme is of high computational
complexity. Therefore, the MIMO research community has expressed sig-
nificant interest in more practical linear precoding strategies. The zero-
forcing-beamforming/block-diagonalization (ZF-BF/BD) [10, 9] is a simple
linear transmit processing which intends to force co-channel interference
(CCI) to zero. When users are equipped with a single received antenna
Nr = R = 1, propagation multi-input-single-output (MISO) channels are
66
Page 72
Multi-user MIMO feedback
vectors. Stacking the MISO channels of M users we express the composite
channel as
H =
⎡⎢⎢⎢⎢⎢⎢⎢⎣
h1
h2
· · ·
hM
⎤⎥⎥⎥⎥⎥⎥⎥⎦. (5.2)
Having the composite channel H, the ZF-BF precoder is defined as
WZF = HH(HHH)−1. (5.3)
Obviously, when only a quantized version of MISO channel vectors is
available at the transmitter, the CCI will not be equal to zero. The more
precise the feedback is, the smaller the CCI becomes.
In case Nr > 1, the channel may be virtualized at the receiver as heffk =
ukHk, where uk is a receiver filter at user k. Accordingly, above ZF-BF
can be employed, replacing hk → heffk . Alternatively, one may employ
block-diagonalization [9].
In [19] the authors suggest feedback of normalized covariance matrices
Rk =HH
kHk
||Hk||2F(5.4)
and introduce a precoding scheme employing generalized eigenvectors
V = eig(Rk,Ri), k �= i to guarantee zero CCI with an MRC receiver. For
example, the precoder for two users is then defined as
WGE,k,i = [vn, vm],m �= n, (5.5)
where two generalized eigenvectors vn and vm, out of Nt generalized eigen-
vectors, maximize the sum-rate. GE transmit processing guarantees zero
CCI in case of the ideal feedback, but is not always sum-rate optimal. On
the other hand, it is shown to be superior to ZF-BF with limited feedback.
We have studied feedback design for GE in PVI.
Unlike in ZF-BF and GE, in [78, 14] the authors do not intend to set
CCI to zero. Instead, they propose to maximize signal-to-leakage-noise-
ratio (SLNR) rather than the SINR of a user. In other words, instead of
minimizing CCI to a user, they minimize CCI caused by the user to the
other co-scheduled users. The precoder is then obtained as the dominant
generalized eigenvector
wSLNR,k = eig(Rk,M∑
i=1,i �=k
Ri +Nrσ2I), (5.6)
67
Page 73
Multi-user MIMO feedback
where Rk = HHkHk and I is an identity matrix.
Given a transmit processing, feedback can be specifically designed for it.
On the other hand, MU-MIMO is often used in dynamic switching with
SU-MIMO and possibly in future as well with the multi-user-superposition-
technique (MUST), with an example of non-orthogonal-multiple-access
(NOMA) [79]. Therefore, designing a unified feedback that would be suited
to all schemes is a challenge. From a practical point of view, feedback shall
be modular, where baseline feedback is a compromise between all trans-
mit schemes and some additional targeted feedback may be provided by
the UE to the eNB for a given transmission scheme.
5.3 Feedback for GE precoding
The authors in [19] suggested direct (per-component) quantization of the
normalized covariance matrix and showed that such feedback outperforms
traditional feedback of eigenvectors only. In (5.7) we show an example of
Rk direct quantization when Nt = 4. There are Nt−1 = 3 real diagonal el-
ements and Nt(Nt− 1)/2 = 6 imaginary diagonal elements. In total, there
are (Nt + 1)(Nt − 1) = 15 degrees of freedom (d.o.f) to quantize. In case of
Nt = 2, there are 3 d.o.f to quantize. Each degree of freedom is quantized
with Q bits.
R4×4 =
⎡⎢⎢⎢⎢⎢⎢⎢⎣
d1 o1 o2 o3
o1 d2 o4 o5
o2 o4 d3 o6
o3 o5 o6 1−∑3
i=1 di
⎤⎥⎥⎥⎥⎥⎥⎥⎦
(5.7)
In PVI we have studied the quantization of Rk; and we suggested split-
ting the quantization into vector quantization of eigenvectors (baseline
feedback) and direct quantization of normalized eigenvalues (additional
feedback). Figure 5.1 and Figure 5.2 show the sum rate for optimal bit
splits with two different antenna settings and two users.
When Nr = 2 and Nt = 2, direct quantization seems to benefit from joint
quantization of eigenvalues and eigenvectors. With a 6 bit total budget,
corresponding to Q = 2, it seems that the optimal amount of bits invested
in eigenvalues should be < 1. In case of a 9 bit total quantization budget,
the number of bits invested in eigenvalues shall be between 1 and 2.
When Nr = 2 and Nt = 4, direct quantization performs poorly, compared
to the proposed quantization. With a total of 15 bits for quantization, the
68
Page 74
Multi-user MIMO feedback
optimal amount of bits invested in eigenvalues should be <1. For example,
the LTE feedback budget for Nt = 4 is 4 bits, therefore a 15-bit feedback
budget is already non-realistic.
From the above one may conclude that with a small feedback budget,
it is not worth employing direct quantization and all the bits should be
invested in vector quantization of eigenvectors.
15 20 25 306
7
8
9
10
11
12
13
14
15
Nr=Nt=M=2
SNR [dB]
Sum
Rat
e [b
ps/H
z]Direct (Q=3)Eig 7bit+2bitEig 8bit+1bitEig 9bit+0bitDirect (Q=2)Eig 6bit+0bitEig 5bit+1bit
Figure 5.1. Finding the optimal bit split between eigenvector and eigenvalues of Rk.
In addition, in PVI, we proposed an improvement to direct quantization
suggested in [19] and we derived a closed-form CDF expression for the
normalized eigenvalues of an IID propagation channel. We list some ex-
amples in Table 5.1. Note that z is a normalized eigenvalue and F(z) is a
combined CDF of both eigenvalues z = z1 ∀ 0 ≤ z < 12 and z = z2 ∀ 1
2 <
z ≤ 1.
Table 5.1. Examples of CDFs
Nt ×Nr F (z)
2× 2 6z − 12z2 + 8z3
3× 2 30z2 − 100z3 + 120z4 − 48z5
4× 2 140z3 − 630z4 + 1092z5 − 840z6 + 240z7
69
Page 75
Multi-user MIMO feedback
0 5 10 15 20 25 302
4
6
8
10
12
SNR [dB]
Sum
Rat
e [b
ps/H
z]
Nt=4,Nr=M=2, 1 layer per User
Direct Improved (Q=1)Eig 12+3bitEig 13+2bitEig 14+1bitEig 15+0bit
Figure 5.2. Finding the optimal bit split between eigenvector and eigenvalues of Rk.
5.4 Improving the CSI by successive refinement
Performance of MU-MIMO can be improved by providing feedback tar-
geted to MU-MIMO [80, 81, 82], as well as by improving the precision of
SU-MIMO feedback. The precision of feedback in MIMO systems can be
increased by designing a codebook with a larger number of bits. Unfor-
tunately, the complexity of codeword selection and memory requirements
grow exponentially with the number of bits invested in the codeword.
There exist several approaches to improve codebook resolution and keep
the complexity low. For example, in [83], an adaptive codebook is pro-
posed, where the receiver selects at each time a codebook from a set of
predefined codebooks, where the selected codebook is chosen based on the
channel distribution. In [84], the codebook is adapted using a scaling and
rotation operation to match the varying channel distribution.
One family of limited-feedback techniques, providing low-complexity pre-
cise feedback for slowly varying channels, uses differential feedback to
track the CSI. Differential feedback is typically selected from a local code-
book, which depends on the previously reported precoding matrix (PM).
Differential feedback is, however, known to be vulnerable to uplink er-
rors. A differential codebook for multi-input-single-output (MISO) chan-
nels may be a spherical cap [85], polar cap [86] or a combination of both [87].
Differential codebooks for MIMO channels may be as well defined by a
70
Page 76
Multi-user MIMO feedback
pseudo-random matrix. In [88], a random precoder matrix is used to track
the channel, and in [89], a pseudo-random geodesic originating from the
previous PM is constructed. For both cases [88, 89] the feedback of a
single bit determines the direction of the refinement, and a new refined
precoding matrix serves as a base for consecutive refinement. In [90], a
set of Hermitian positive semi-definite matrices, parameters of a geodesic
originating from the previous PM, form a differential codebook. Yet an-
other refinement method has been proposed in [91], where a codebook of
tangent vectors corresponding to geodesics forms a local refinement code-
book which is invariant to the selection of codeword from a base codebook.
In [92], differential feedback is a quantized null-space of the previously
reported precoder within the space of the instantaneous channel realiza-
tion. In the context of massive-MIMO, non-coherent trellis-coded quanti-
zation is employed to quantize the feedback. A differential codebook may
be designed as well for a particular antenna configuration, for example, a
differential codebook for polarized channels has been proposed in [93].
Another family of feedback techniques uses successive refinements to
improve the CSI at the transmitter. In [29] a hierarchical codebook is
proposed, where the receiver searches within a refinement localized sub-
codebook corresponding to the selected codeword from a base codebook. In
this case, all refinement codebooks, corresponding to each codeword in a
base codebook, need to be computed real-time or pre-computed and stored
in the memory. In [75][28] a local/refinement codebook is scaled and ro-
tated to form a refinement codebook for codeword selected in a base code-
book. In [75], a uniformly quantized spherical cap is proposed as a local
codebook, and in [28], a Kerdock ring forms a local codebook used as the
refinement codebook. The scaling and rotation maps of the Kerdock ring
are shown to be of low complexity. The scaling and rotation maps from
[84] have been generalized to higher transmission ranks in [94]. Another
codebook refinement method, called multiple description coding (MDC),
has been discussed in [26][27]. Several codebooks are designed and mul-
tiplexed in time. For MDC, each PM feedback is a stand alone CSI. From a
PM selection complexity point of view, for all herein mentioned refinement
methods [29, 26, 27, 75, 28, 91] the user equipment needs to estimate
the performance metric for all the codewords of both base and refinement
codebooks.
We proposed successive refinement by the second best codeword (DCC-
SB) in PV. We interpolate between the best and the second best codeword
71
Page 77
Multi-user MIMO feedback
by means of a geodesic on Grassmann manifold. We derived an optimal
interpolation parameter that maximizes the SINR at the receiver
popt =arctan 2 Re {a∗b}
|a|2−|b|22φ
, (5.8)
where a = xHw1, b = (xHwme−jv − a cos (φ))/ sin(φ), v = ∠wHnwm, φ =
arccos(|wHnwm|). Vectors wn and wm denote two rank 1 precoders and are
of dimension Nt × 1. The vector x maximizing the SINR at the receiver is
xH = h||h||F .
However, the optimal parameter would require additional feedback from
the UE to the eNB. Therefore, in PV, we set an interpolation parameter
to a fixed value pfix. We show that our refinement scheme, requiring two
times 4 bits (using pfix = 0.4), performs close to the performance of an 8-bit
codebook. Figure 5.3 shows that the proposed refinement can perform as
well as a codebook of double the size, however the complexity is reduced.
10 12 14 16 18 20 220
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Post−processing SINR (dB)
8bit CB (IID)4bit CB (IID)Full CSI4bit CB (IID) + 4bit refinement (DCC−SB)
Figure 5.3. The 2nd best refinement (DCC-SB) performing close to codebook of doublesize.
In PX we have further studied an improved DCC-SB technique. We
investigated how the feedback of the 3rd, 4th, etc. best codeword can im-
prove knowledge of the CSI at the eNB. Figure 5.4 illustrates the interpo-
lation on the manifold. Notice that when interpolating from the best W1
to the worst W16 codeword, the optimal interpolate does not lie between
these two points anymore.
From the above, we made a hypothesis that even the worst codeword
W16 in a codebook may improve the CSI when interpolated with the best
codeword. Unfortunately, it requires knowledge of the popt interpolation
parameter at the transmitter. Therefore, we made use of CQI feedback,
which in 3GPP LTE accompanies the PMI feedback. Using a ratio of the
72
Page 78
Multi-user MIMO feedback
W1
W3
W2
W16
W15
X
12(popt)
Figure 5.4. An illustration of proposed m-th best refinement technique.
fed-back CQIs belonging to the best PMI and the m-th best PMI, we obtain
an upper bound of the interpolation parameter
pcqi =arctan 2 sin (φ)(ρR−cos (φ))
sin2 (φ)−ρ2R+2ρR cos (φ)−cos2 (φ)
2φ, (5.9)
where φ = arccos |wH1 wm| and defining ρR = ρm
ρ1=√
CQImCQI1
< 1.
0 5 10 151.18
1.19
1.2
1.21
1.22
1.23
1.24
1.25
1.26
1.27
Number of codewords evaluated in refinement codebook CR (NcR)
Ave
rage
Rx
pow
er re
lativ
e to
no
refin
emnt
DCC p=pfix=0.4 (4b base + 4b refine)
DCC p=popt (4b base + 4b refine)
DCC p=pcqi (4b base + 4b refine)
1−step Kerdock α=0.5 (4b base + 4b refine)MDC type 1 (4b+4b)MDC type 2 (4b+4b)
Figure 5.5. An illustration of proposed m-th best refinement technique.
Figure 5.5 shows how the m-th best codeword improves the Rx power
with fixed interpolation pfix = 0.4, optimal popt requiring extra feedback
and pcqi obtained from fed-back CQIs. The gain is a function of the number
of codewords in the refinement codebook CR. Obviously, when pfix is used
for interpolation at the transmitter, only the 2nd (CR = 0 → 1) and 3rd
(CR = 1 → 2) best PMIs bring gain. On the other hand, with pcqi, the large
benefit from the 16th best codeword in the refinement codebook (CR =
73
Page 79
Multi-user MIMO feedback
14 → 15) is observed.
We compared our 1-step refinement technique with a 1-step Kerdock
ring refinement from [28] and it performs similarly.
When the number of receive antennas Nr > 1, maximizing the SINR
at the receiver does not mean setting the precoder to the strongest eigen-
beam. In addition to eigenbeams, eigenvalues also matter. Nevertheless,
the metric of the chordal distance may be used to find popt, in a way sim-
ilar to the case of SU-MIMO codebook design in 4.2. With the chordal
distance metric, we were able to derive in PIII popt as well for Nr > 1 and
the transmission rank R = min(Nr, Nt) > 1.
The simulation results in PIII showed that a significant gain can be
obtained from DCC-MB in the context of 3GPP LTE.
74
Page 80
6. Coordinated multi-point feedback
The coordinated multi-point transmission, well known as distributed MIMO,
is a technology that received a great of attention in literature during the
standardization of release 11. Afterwards in release 12, CoMP has been
discussed in the context of non-ideal back-haul (NIB).
6.1 CoMP Schemes in LTE
In release 11, several schemes, such as Dynamic point switching (DPS) ,
Dynamic point blanking/muting (DPB), Coordinated beamforming (CoBF)
and Joint transmission (JT), were endorsed and supported by a brand
new transmission mode TM10. A universal feedback framework of CSI
processes was introduced to support all these schemes. This feedback
framework has been discussed for instance, in [30].
In the dynamic-point switching shown in Figure 6.1, a user device is
served always from the point with the highest instantaneous gain. In
this case, data needs to be ready only at one transmission point. A cen-
tral scheduler has to decide, based on the instantaneous CQI, from which
point the user is to be served.
Dynamic Point Selection
H1 / H2
Figure 6.1. Illustration of dynamic point selection, UE is served always from the strongerpoint.
In dynamic point muting/blanking, illustrated in Figure 6.2, the domi-
75
Page 81
Coordinated multi-point feedback
nant interferer may be dynamically muted, and data needs to be available
only at the serving cell. The technique is suitable as well for NIB because
only CQIs and muting patterns need to be exchanged between the cen-
tral scheduler and nodes. In addition, a distributed algorithm exchanging
these muting patterns on peer-to-peer bases is possible [95].
Dynamic Point Muting
Figure 6.2. Illustration of dynamic point muting, dominant interferer of a UE may bemuted.
CoBF, illustrated in Figure 6.3, is a scheme where data needs to be avail-
able only at the primary serving cell. And the points need to exchange
scheduled spatial characteristics.
Coordinated Beamforming
Figure 6.3. Illustration of coordinated beamforming, eNBs coordinate beams to avoid in-terference.
The last and the most complicated scheme is called Joint transmission,
and is illustrated in Figure 6.4. The user terminal is served by both points
at the same time. This scheme requires data available at all transmission
points, plus the central scheduler to determine the selected MCS.
6.2 CoMP Feedback
In the scope of this thesis, we will further discuss only feedback for JT-
CoMP. In 3GPP, JT-CoMP has been discussed in the context of heteroge-
neous networks, enabled by cloud computing. The macro-cells contain a
central scheduler connected by an optical fiber to the radio remote heads
(RRHs). RRHs perform only radio-related signal processing.
76
Page 82
Coordinated multi-point feedback
Joint Transmission
H1 H2+
Figure 6.4. Illustration of joint transmission, two eNBs transmit the same informationto a single UE.
A macro and the RRHs form a cooperative cluster. Generalizing the
heterogeneous 3GPP scenario to arbitrary architecture, we will assume a
set P of transmission points in cooperation. The cardinality of P is P .
Generally, a received signal at the user u may be expressed as
yu =[h1w1 h2w2 · · · hLwL
]⎡⎢⎢⎢⎢⎢⎢⎢⎣
c1s1
c2s2
...
cLsL
⎤⎥⎥⎥⎥⎥⎥⎥⎦+ n, (6.1)
where hlwl is an effective channel for layer l ∈ {1..L}. Each layer car-
ries one symbol sl and is transmitted from one transmission point. Two
or more layers may carry the same symbol. And some layers may be in-
tended to other users. The term n contains noise and other received in-
terference. The symbols may be transmitted with a coherent inter-point
combiner cl.
Based on the above, JT may be split further into several subgroups. The
first split is whether the central scheduler supports MU processing or not.
The second split is whether transmission is coherent or non-coherent. For
example, if all symbols of the above equation are equal and intended for a
single user, s1 = s2 = sL and all combiners are set to 1 cl = 1, ∀l, we talk
about single-layer-non-coherent-SU-MIMO-JT transmission.
To coherently combine layers carrying the same symbol, the transmitter
77
Page 83
Coordinated multi-point feedback
needs to apply inter-point combiners cl = ejαp
y =[h1w1 h2w2 · · · hPwP
]⎡⎢⎢⎢⎢⎢⎢⎢⎣
s1
ejα2s1
...
ejαP s1
⎤⎥⎥⎥⎥⎥⎥⎥⎦+ n, (6.2)
which can be provided in the form of limited feedback. The LTE standard
does not support separate feedback of the inter-point combiners, however
a combiner can be obtained by means of the CSI processes, where one port
is configured at one point and the other port at the other point, assuming
that the channel statistics of both channels are similar and a meaningful
channel estimate can be obtained.
A CSI process is configured always with a hypothesis. A hypothesis
specifies resources to measure the signal part (CSI-RS) and resources to
measure the interference part (IMR) . The network smartly configuring
CSI-RS and IMR may compute the CQI and PMI given that an interferer
is present or is muted. For example, if eNB configures a UE with several
resource elements (REs) being the IMR, and does not transmit a signal
on those REs, the UE measures only out of the cell interference. Each
terminal may be configured with up to 3 CSI processes in a single-carrier
OFDM system.
The main CoMP challenges are:
• large amount of feedback delay, which can be partially overcome by
providing an optical fiber between the transmission point and central
scheduler
• A need for synchronization of the two networks in cooperation, e.g. by
GPS clocks.
• Unequal delay between signals received from different transmission
points.
Unequal delay causes phase-combiner frequency selectivity and makes
the combiner feedback obsolete. The delays could be equalized by means
of timing advance, but such coordination would be complex. While trans-
mission points within the coordination area are typically synchronized.
In general, JT-CoMP is not so different from Single Frequency Network
78
Page 84
Coordinated multi-point feedback
(SFN) transmission, used for a physical multicast channel (PMCH), which
in LTE uses an extended cyclic prefix and a much denser pattern for the
reference symbols compared to PDSCH on TM10.
The impact of delay, CSI imperfection and other cell interference (OCI)
on JT and CoBF have been studied in [96], with the conclusion that SU-
JT-CoMP is the most suitable in the conditions of a small number of feed-
back bits and moderate delay. While MU-JT-CoMP requires more quality
CSI and CBF is the least robust to an imperfect CSI. Furthermore, the
impact of time and frequency offset on JT-CoMP has been studied in [97],
where reduced gains were observed due to those imperfections.
When the precoders for user u at transmission points of a cooperative
cluster are concatenated
wufull =
[c1w
T1 c2w
T2 · · · cPw
TP
]T, (6.3)
the central scheduler may perform a MU-MIMO operation, such as ZF-BF.
This step needs to be followed by per-tx-point normalization [98], guaran-
teeing that the max tx-power limit per point is not exceeded. In general,
power pooling between points is not allowed, nevertheless a point can
transmit with a smaller tx-power.
The power allocation for two-cell transmission with two-users, the per
cell-power constraint and synchronization non-ideality (random uniform
phasing effect) is studied in [99]. The authors conclude that the ideal
transmission scheme in this case is SU-MIMO, i.e. each cell serves one
UE with full power. As a consequence, the authors in [99] conclude that
the above leads to 4 possible transmission schemes:
1. Both cells serve user 1
2. Both cells serve user 2
3. Cell 1 serves user 1 and Cell 2 servers user 2
4. Cell 1 serves user 2 and Cell 2 servers user 1
Which of the above four transmission schemes are optimal, depends on
the SINRs and the instantaneous state of the PF scheduler in te system.
In PIV, we have studied case 1 and 2 with a flexible layer-arrangement
operation with and without phase synchronization issues. We serve one
UE with a plurality of layers from two or more transmission points. This
79
Page 85
Coordinated multi-point feedback
becomes a combinatorial problem of how to arrange the layers of each
transmission point to form joint layers transmitted to the UE. We provide
a metric that the UE may use to determine the optimal layer arrange-
ment. Alternatively, the UE may search a codebook of layer arrangements
to find the optimal one. We show that JT using layer-arrangement pro-
vides a gain to the baseline layer operation and that layer-arrangement
brings significant gain as well in the case of non-coherent JT.
80
Page 86
7. Summary
MIMO is a key technology of today’s and future wireless communication
standards. For example, transmit beamforming and spatial multiplexing
together with the interference suppression capabilities of linear filters are
the basic building blocks of today’s systems. In future, massive MIMO
(full-dimension MIMO) is expected to be an enabler of 5G communication
in cm- and mm-wave spectrum, because beamforming gain can overcome
the increased pathloss. In this thesis we addressed several aspects of
MIMO communication.
Coherent broadcast systems, such as OFDMA, operate on pilot-aided
channel estimation. With an ever increasing amount of antennas at the
transmitter, common reference symbols become prohibitive and a system
may efficiently operate only on virtualized user-specific reference sym-
bols. However, user-specific reference-symbol based channel estimation
has some challenges which have been addressed in this thesis. In TDD,
the overall phase of a spatial-precoder is ambiguous, and in FDD, operat-
ing on limited feedback, channel discontinuities/edge-effect resulting from
discrete spatial precoder may cause systematic channel estimation error.
This error may be overcome by precoder interpolation at the transmitter
as discussed herein. However, in the wireless systems of the future, user-
specific reference symbols could be designed such that they are present
as well outside the allocated band, enabling channel estimation over the
allocated edge.
After MIMO channel estimation, codebook design is one more aspect
of FDD MIMO addressed in this thesis. A codebook may be designed
by placing codewords equidistantly in space, called sub-space packing.
This thesis proposed a sub-space packing algorithm, called the expansion-
compression algorithm (ECA), being an alternative to the well-known Lloyd
packing algorithm. ECA was shown to be an efficient tool to obtain pack-
81
Page 87
Summary
ings close to Ranking bound on a Grassman manifold. Furthermore, with
ECA, packings may be obtained on an arbitrary manifold for an arbitrary
distance metric. On the other side, wireless standard codebook design is
not only about maximizing the minimum distance metric between code-
words in a codebook. For example, when a codebook needs to be imple-
mented in hardware, properties such as constant modulus, discrete phase
quantization and/or nested property become important design criteria. All
these significantly reduce the complexity of codebook search. The 4Tx
LTE single-codebook, has been designed to fit several antenna array con-
figurations and at the same time to provide good metric properties, while
full-filling above codebook design criteria. The new generation of wire-
less standard codebooks are based on a double-codebook structure, where
channel statistics are quantized by the first codebook and instantaneous
variations by the other codebook. Double-codebook provides more efficient
quantization than single-codebook when the number of antennas is four
or more. This thesis has proposed a new degree of freedom in the double-
codebook structure, where each polarization can be transmitted on a dif-
ferent beam. A codebook employing this degree-of-freedom has been one
of two codebook designs in Release 12, and has been considered as well in
double codebook design for FD-MIMO in Release 13. Unfortunately, this
proposal did not secure sufficient political support.
The main MIMO topic addressed in this thesis was successive refine-
ment, which is targeted for users with low mobility. When the MIMO
channel coherence time is very long, 2nd feedback of the same best spa-
tial precoding codeword from a codebook does not improve channel state
information at the receiver anymore. However, low mobility users are the
suitable users for multi-user MIMO spatial multiplexing, which requires
precise knowledge of the CSI at the transmitter. Therefore, it makes sense
to employ the 2nd feedback message for refinement of the 1st feedback.
Despite the fact that there exist several refinement techniques, the one
proposed in this thesis is unique in some ways. Finding the m-th best
codeword in a codebook is of very low additional complexity. And when
the channel quality index (CQI) is fed back together with the m-th best
precoding matrix index (PMI), this being a standard procedure, the trans-
mitter may approximate the interpolation parameter. It has been shown
in this thesis that both, the second best and as well the worst PMI may
significantly improve the CSI at the transmitter. In addition, when the
last best (worst) codeword is fed back, the transmitter has knowledge of
82
Page 88
Summary
the best-companion PMI and CQI for MU-MIMO pairing. When the sec-
ond best PMI is fed-back, the transmitter has more possibilities to pair
users in NOMA, this being a topic for future research.
Whether codebook design will play a significant role in the future is a
question. However, it is most probable that 5G massive-MIMO systems
will operate in TDD and rely more on channel reciprocity. In this case the
pilot design for sounding is the major challenge.
83
Page 90
References
[1] 3rd Generation Partnership Project; TSG RAN, “(E-UTRA); 3GPP TS 36.211version 10.4.0 Physical channels and modulation (Release 10),” Sep. 2011,available at http://www.3gpp.org/.
[2] M. Al-Shibly and J. Habaebi, M.H. ; Chebil, “Carrier aggregation in longterm evolution-advanced,” in Control and System Graduate Research Collo-quium (ICSGRC), Jul. 2012, pp. 154 – 159.
[3] A. Benjebbour, Y. Saito, Y. Kishiyama, L. Anxin, A. Harada, and T. Naka-mura, “Concept and practical considerations of non-orthogonal multiple ac-cess (NOMA) for future radio access,” Nov. 2013, pp. 770 – 774.
[4] A. Perotti and B. Popovic, “Non-orthogonal multiple access for degradedbroadcast channels: RA-CEMA,” in IEEE Wireless Communications andNetworking Conference, Mar. 2015, pp. 735 – 740.
[5] T. Cover, “Broadcast channels,” IEEE Trans. Inf. Th., vol. 18, no. 1, pp. 2 –14, Jan. 1972.
[6] A. Schertz and C. Weck, “Hierarchical modulation - the transmission of twoindependent DVB-T multiplexes on a single frequency,” in EBU TechnicalReview, 2003, pp. 1 – 13.
[7] Metis2020, “Proposed solutions for new radio access (d2.3),”www.metis2020.com/documents/deliverables/, Feb. 2015.
[8] 3rd Generation Partnership Project, TSG RAN, “Evolved universal ter-restrial radio access (E-UTRA); phys. channels and modulation (Rel 8),”www.3gpp.org, Sep. 2007.
[9] Q. H. Spencer, A. L. Swindlehurst, M. Haardt, and N. Jindal, “Zero-forcingmethods for downlink spatial multiplexing in multiuser MIMO channel,”IEEE Trans. Sign. Proc., vol. 52(2), pp. 461–471, Feb. 2004.
[10] L.-U. Choi and R. D. Murch, “A transmit preprocessing technique for mul-tiuser MIMO systems using a decomposition approach,” IEEE Trans. Wire-less Comm., vol. 3(1), pp. 20 – 24, Jan. 2004.
[11] C. Yan, A. Harada, A. Benjebbour, Y. Lan, A. Li, and H. Jiang, “Receiverdesign for downlink non-orthogonal multiple access (NOMA),” in Proc. IEEEInt. Conf. Veh. Tech., May 2015, pp. 1–6.
85
Page 91
References
[12] M. Sharif and B. Hassibi, “On the capacity of MIMO broadcast channel withpartial side information,” in Asilomar Conference on Signals, Systems andComputers, vol. 1, Nov. 2003, pp. 958 – 962.
[13] S. Wagner, S. Sesia, and D. Slock, “On unitary beamforming for mimo broad-cast channels,” in Proc. IEEE Int. Conf. on Comm., May 2010, pp. 1 – 5.
[14] M. Sadek, A. Tarighat, and A. H. Sayed, “A leakage-based precoding schemefor downlink multi-user MIMO channels,” IEEE Trans. Wireless Comm.,vol. 6, no. 5, pp. 1711 – 1721, May 2007.
[15] 3GPP, “Study of radio frequency (RF) and electromagnetic compatibility(EMC) requirements for active antenna array system (AAS) base station,”http://www.3gpp.org/DynaReport/37840.htm, Jan. 2014, tR37.840.
[16] J. Choi, K. Lee, D. J. Love, and T. Kim, “Advanced limited feedback designsfor FD-MIMO using uniform planar arrays,” in Proc. IEEE GLOBECOM,Dec. 2015, pp. 1 – 6.
[17] IEEE, “Local and metropolitan area networks – Specific requirements– Part11: Wireless LAN Medium Access Control (MAC)and Physical Layer (PHY)Specifications Amendment 5: Enhancements for Higher Throughput,” stan-dards.ieee.org/findstds/standard/, 2009.
[18] R. Chen, R. W. Heath Jr., and J. Andrews, “Transmit selection diversityfor unitary precoded multiuser spatial multiplexing systems with linear re-ceivers,” IEEE Trans. Sign. Proc., vol. 55(3), pp. 1159 – 1171, Mar. 2007.
[19] C.-B. Chae, D. Mazzarese, N. Jindal, and R. W. Heath Jr., “Coordinatedbeamforming with limited feedback in the MIMO broadcast channel,” IEEEJ. Sel. Areas Comm., vol. 26, pp. 1505 – 1515, Oct. 2008.
[20] T.-Z. Cheng and C.-W. Yuan, “Novel limited feedback scheme under theMIMO broadcast system,” The Journal of China Universitites of Posts andTelecommunications, vol. 16, pp. 11 – 16, Dec. 2009.
[21] K. Pedersen, J. Andersen, J. Kermoal, and P. Mogensen, “A stochasticmultiple-input-multiple-output radio channel model for evaluation of space-time coding algorithms,” in Proc. IEEE Int. Conf. Veh. Tech., vol. 2, Sep.2000, pp. 893 – 897.
[22] 3GPP, TSG RAN, “Spatial channel model for multiple input multiple output(MIMO) simulations (TR25.996,v6.1.0),” www.3gpp.org, Sep. 2003.
[23] Kyösti, P, “WINNER II channel models; D1.1.2.” www.ist-winner.org, Sep.2007.
[24] R. Gohary and T. Davidson, “Noncoherent MIMO communication: Grass-mannian constellations and efficient detection,” IEEE Trans. Inf. Th.,vol. 55, no. 3, pp. 1176 – 1205, Mar. 2009.
[25] P. Xia and G. Giannakis, “Design and analysis of transmit-beamformingbased on limited-rate feedback,” in Proc. IEEE Int. Conf. Veh. Tech., vol. 3,Sep. 2004, pp. 1653 – 1657.
[26] R1-090866(Qualcomm), “Multiple description coding for spatial feedbackpayload reduction,” www.3gpp.org, Feb. 2009.
86
Page 92
References
[27] C. Jiang, M. Wang, C. Yang, F. Shu, J. Wang, W. Sheng, and Q. Chen, “MIMOprecoding using rotating codebooks,” IEEE Trans. Veh. Tech., vol. 60(3), pp.1222 – 1227, Mar. 2011.
[28] R. W. Heath Jr., T. Wu, and A. Soong, “Progressive refinement for highresolution limited feedback multiuser MIMO beamforming,” in Proc. IEEEAsilomar Conf., Oct. 2008, pp. 743 – 747.
[29] F. Boccardi, H. Huang, and A. Alexiou, “Hierarchical quantization andits application to multiuser eigenmode transmissions for MIMO broadcastchannels with limited feedback,” in Proc. IEEE Personal, Indoor and MobileRadio Conference, Sep. 2007, pp. 1 – 5.
[30] H.-L. Määttänen, K. Hämäläinen, J. Venäläinen, K. Schober, M. Enescu,and M. Valkama, “System-level performance of LTE-advanced with jointtransmission and dynamic point selection schemes,” Journal on Advancesin Sig. Processing, pp. 1 – 18, Nov. 2012.
[31] D. Su, X. Hou, and C. Yang, “Quantization based on per-cell codebook in co-operative multi-cell systems,” in IEEE Wireless Communications and Net-working Conference, Mar. 2011, pp. 1753 – 1758.
[32] F. Yuan and C. Yang, “Phase ambiguity quantization for per-cell codebookbased limited feedback coordinated multi-point transmission systems,” inProc. IEEE Int. Conf. Veh. Tech., May 2011, pp. 1 – 5.
[33] L. W. Tu, An Introduction to Manifolds. Springer, 2011.
[34] J. Jost, Riemannian Geometry and Geometric Analysis (5th edition).Springer, 2008.
[35] R.-A. Pitaval, A. Srinivasan, and O. Tirkkonen, “Codebooks in flag mani-folds for limited feedback MIMO precoding,” in Proc. IEEE SCC, Jan. 2013,pp. 1 – 5.
[36] A. Edelman, T. A. Arias, and S. T. Smith, “The geometry of algorithms withorthogonality constraints,” SIAM Matrix Anal. Appl., vol. 20(2), pp. 303 –353, 1998.
[37] P.-A. Absil, R. Mahony, and R. Sepulchre, “Riemannian geometry of grass-mann manifolds with a view on the algorithmic computation,” Acta Appli-candae Mathematicae, vol. 80, 2004.
[38] T. Pande and D. J. Love, “Reduced feedback MIMO-OFDM precoding andantenna selection,” IEEE Trans. Sign. Proc., vol. 55, no. 5, pp. 2284 – 2293,May 2007.
[39] G. Sundaramoorthiand, A. Mennucciand, S. Soattoand, and A. Yezzi, “A newgeometric metric in the space of curves, and applications to tracking deform-ing objects by prediction and filtering,” SIAM Journal on Imaging Sciences,vol. 4, no. 1, pp. 109 – 145, 2011.
[40] H. Tsai and K. S. Chan, “A note on parameter differentiation of matrix expo-nentials, with applications to continuous-time modelling,” Bernoulli, vol. 9,no. 5, pp. 895 – 919, Jan. 2003.
87
Page 93
References
[41] L. Zheng and D. Tse, “Communication on the grassmann manifold: ageometric approach to the noncoherent multiple-antenna channel,” IEEETrans. Inf. Th., vol. 48(2), pp. 359 – 383, Feb. 2002.
[42] V. Raghavan, J. H. Kotecha, and A. Sayeed, “Why does the kronecker modelresult in misleading capacity estimates?” IEEE Trans. Inf. Th., vol. 56,no. 10, pp. 4843 – 4864, Oct. 2010.
[43] S. Loyka, “Channel capacity of MIMO architecture using the exponentialcorrelation matrix,” IEEE Comm. Lett., vol. 5, pp. 369 – 371, Oct. 2001.
[44] B. Mondal, T. Thomas, E. Visotsky, F. Vook, A. Ghosh, Y.-H. Nam, Y. Li,J. Zhang, M. Zhang, Q. Luo, Y. Kakishima, and K. Kitao, “3D channel modelin 3GPP,” IEEE Comm. Mag., vol. 53, no. 3, pp. 16 – 23, Mar. 2015.
[45] E. Larsson, O. Edfors, F. Tufvesson, and T. Marzetta, “Massive MIMO fornext generation wireless systems,” IEEE Comm. Mag., vol. 52, no. 2, pp. 186– 195, Feb. 2014.
[46] Y. Kim, H. Ji, J. Lee, Y.-H. Nam, B. L. Ng, I. Tzanidis, Y. Li, and J. Zhang,“Full dimension MIMO (FD-MIMO): The next evolution of MIMO in LTEsystems,” IEEE Wireless Communications, vol. 21, no. 3, pp. 92 – 100, Jun.2014.
[47] P. Höher, S. Kaiser, and P. Robertson, “Pilot-symbol-aided channel estima-tion in time and frequency,” in Proc. IEEE GLOBECOM, 1997, pp. 169 –178.
[48] S. Brink, F. Sanzi, and J. Speidel, “Two-dimensional iterative APP channelestimation and decoding for OFDM systems,” in Proc. IEEE GLOBECOM,vol. 2, Nov 2000, pp. 741 – 745.
[49] W. Zhu and M. Fitz, “Adaptive channel estimation for trained mimo-ofdm,”in Proc. Asilomar , vol. 1, 2004, pp. 697 – 701.
[50] G. Auer, “3D MIMO-OFDM channel estimation,” IEEE Trans. Comm.,vol. 60, no. 4, pp. 972 – 985, Apr. 2012.
[51] J. Choi and R. Heath, “Interpolation based transmit beamforming forMIMO-OFDM with limited feedback,” IEEE Trans. Sign. Proc., vol. 53(11),pp. 4125 – 4135, Nov. 2005.
[52] J. Chang, I.-T. Lu, and Y. Li, “Adaptive codebook based channel predictionand interpolation for multiuser MIMO-OFDM systems,” in Proc. IEEE Int.Conf. on Comm., Jun. 2011, pp. 1 – 5.
[53] J. Chang, I. Lu, and Y. Li, “Adaptive codebook-based channel predictionand interpolation for multiuser multiple-input multiple-output–orthogonalfrequency division multiplexing systems,” IET Communcations, pp. 281 –288, 2012.
[54] H.-L. Maattanen, O. Tirkkonen, and K. Hugl, “Orthogonalizing transmis-sion in MIMO with linear receiver and finite mcs set,” in IEEE WirelessCommunications and Networking Conference, Mar. 2008, pp. 522 – 527.
[55] K. Mukkavilli, A. Sabharwal, E. Erkip, and B. Aazhang, “On beamformingwith finite rate feedback in multiple-antenna systems,” IEEE Trans. Inf.Th., vol. 49, no. 10, pp. 2562–2579, Oct. 2003.
88
Page 94
References
[56] B. Mondal, S. Dutta, and R. W. Heath Jr., “Quantization on the Grassmannmanifold,” IEEE Trans. Sign. Proc., vol. 55, no. 8, pp. 4208 – 4216, Aug.2007.
[57] J. H. Conway, R. H. Hardin, and N. J. A. Sloane, “Packing lines, planes,etc.: Packings in Grassmannian spaces,” Experimental Mathematics, vol. 5,no. 2, 1996.
[58] D. J. Love and R. W. Heath Jr., “Limited feedback unitary precoding forspatial multiplexing systems,” IEEE Trans. Inf. Th., vol. 51, no. 8, pp. 2067–2076, Aug. 2005.
[59] A. Barg and D.-Y. Nogin, “Bounds on packings of spheres in the Grassmannmanifold,” IEEE Trans. Inf. Th., vol. 48, no. 9, pp. 2450 – 2054, Sep. 2002.
[60] W. Utschick, “Tracking of signal subspace projectors,” IEEE Trans. Sign.Proc., vol. 50, no. 4, pp. 769 – 778, Apr. 2002.
[61] J. C. Roh and B. Rao, “An efficient feedback method for MIMO systems withslowly time-varying channels,” in IEEE Wireless Communications and Net-working Conference, vol. 2, Mar. 2004, pp. 760 – 764.
[62] M. Sadrabadi, A. Khandani, and F. Lahouti, “New method of channelfeedback quantization for high data rate MIMO systems,” in Proc. IEEEGLOBECOM, vol. 1, Dec. 2004, pp. 91 – 95.
[63] D. Agrawal, T. Richardson, and R. Urbanke, “Multiple-antenna signal con-stellations for fading channels,” IEEE Trans. Inf. Th., pp. 2618 – 2626, Sep.2001.
[64] J. A. Tropp, I. S. Dhillon, R. W. Heath Jr., and T. Stromher, “Construc-tiong pakings in Grassmannian manifolds via alternating projection,” Ex-per. Math. To appear, 2007.
[65] P. Xia and G. B. Giannakis, “Design and analysis of transmit-beamformingbased on limited-rate feedback,” IEEE Trans. Sign. Proc., vol. 54, no. 5, pp.1853 – 1865, May 2006.
[66] J. L. Xiayu Zheng, Yao Xie and P. Stoica, “MIMO transmit beamforming un-der uniform elemental power constraint,” IEEE Trans. Sign. Proc., vol. 55,no. 11, Nov. 2007.
[67] T. Pande, D. Love, and J. Krogmeier, “On some techniques for reducing thefeedback requirement in precoded mimo-ofdm,” in Proc. IEEE GLOBECOM,Nov. 2006, pp. 1 – 5.
[68] F. Morgan, Riemmanian Geometry. Jones and Barlett publishers, 1993.
[69] R. Rankin, “The closest packing of spherical caps in n dimensions,” Proc.Glasgow Math. Assoc., no. 2, pp. 138 – 144, 1955.
[70] Nokia, “R1-072979 - precoding codebook performance comparison for 4x2lte dl su-mimo,” 3GPP TSG RAN WG1 Meeting 49-BIS, Jun. 2007,http://www.3gpp.org/ftp/.
[71] D. J. Love and R. W. Heath Jr., “Limited feedback diversity techniques forcorrelated channels,” IEEE Trans. Veh. Tech., vol. 55(2), pp. 718 – 722, 2006.
89
Page 95
References
[72] X. She, L. Chen, J. Zhu, Y. Jiang, H. Taoka, K. Kusume, and S. Nagata,“Investigation of optimum double codebook design for downlink MIMO inLTE-A,” in Proc. IEEE Int. Conf. Veh. Tech., vol. 1, May 2011, pp. 1 – 5.
[73] T. Shuang, T. Koivisto, H.-L. Määttänen, K. Pietikäinen, T. Roman, andM. Enescu, “Design and evaluation of LTE-advanced double codebook,” inProc. IEEE Int. Conf. Veh. Tech., Apr. 2011, pp. 1 – 5.
[74] J. Chang, I.-T. Lu, and Y. Li, “Efficient adaptive double codebook based CSIprediction for SU/MU MIMO-OFDM systems,” in Proc. IEEE GLOBECOM,Dec. 2011, pp. 1 – 6.
[75] V. Raghavan, R. W. Heath Jr., and A. M. Sayeed, “Systematic codebook de-sign for quantized beamforming in correlated MIMO channels,” IEEE J. Sel.Areas Comm., vol. 25(7), pp. 1298 – 1310, Sep. 2007.
[76] M. Costa, “Writting on dirty paper,” IEEE Trans. Sign. Proc., vol. 29, no. 3,pp. 439 – 441, May 1983.
[77] H. Weingarten, Y. Steinberg, and S. Shamai, “The capacity region of thegaussian multiple-input multiple-output broadcast channel,” IEEE Trans.Inf. Th., pp. 3936 – 3964, Sep. 2006.
[78] M. Sadek, A. Tarighat, and A. Sayed, “Active antenna selection in multiuserMIMO communications,” IEEE Trans. Sign. Proc., vol. 55, no. 4, pp. 1498 –1510, Apr. 2007.
[79] A. Benjebbour, A. Li, Y. Kishiyama, and H. Jiang, “System-level perfor-mance of downlink NOMA combined with SU-MIMO for future LTE en-hancements,” in Proc. IEEE GLOBECOM Workshop, Dec. 2014, pp. 706 –710.
[80] M. Trivellato, F. Boccardi, and H. Huang, “On transceiver design and chan-nel quantization for downlink multiuser MIMO systems with limited feed-back,” IEEE J. Sel. Areas Comm., vol. 26, no. 8, pp. 1494 – 1504, Oct. 2008.
[81] R. Bhagavatula, R. W. Heath Jr., and B. Rao, “Limited feedback with jointCSI quantization for multicell cooperative generalized eigenvector beam-forming,” in IEEE International Conference on Acoustics, Speech, and Sig-nal Processing, 2010, pp. 2838 – 2841.
[82] J. Choi, V. Raghavan, and D. J. Love, “Limited feedback design for the spa-tially correlated multi-antenna broadcast channel,” in Proc. IEEE GLOBE-COM, Dec. 2013, pp. 3481 – 3486.
[83] B. Mondal and R. W. Heath Jr., “Channel adaptive quantization for lim-ited feedback MIMO beamforming systems,” IEEE Trans. Sign. Proc., vol.54(12), pp. 4717 – 4729, Dec. 2006.
[84] R. Samanta and R. W. Heath Jr., “Codebook adaptation for quantized MIMObeamforming systems,” in Proc. IEEE Asilomar Conf., 2005, pp. 376 – 380.
[85] T. Kim, D. J. Love, and B. Clerckx, “MIMO systems with limited rate differ-ential feedback in slowly varying channels,” IEEE Trans. Comm., vol. 59(4),pp. 1175 – 1189, Apr. 2011.
90
Page 96
References
[86] J. Choi, B. Clerckx, N. Lee, and G. Kim, “A new design of polar-cap differ-ential codebook for temporally/spatially correlated MISO channels,” IEEETrans. Wireless Comm., vol. 11(2), pp. 703 – 711, Feb. 2012.
[87] J. Mirza, P. Smith, M. Shafi, P. Dmochowski, and A. Firag, “Double-cap dif-ferential codebook structure for MU MISO systems in correlated channels,”IEEE Wireless Comm. Lett., vol. 3(4), pp. 441 – 444, Aug. 2014.
[88] B. Banister and J. Zeidler, “Feedback assisted transmission subspace track-ing for MIMO systems,” IEEE J. Sel. Areas Comm., vol. 21(3), pp. 452 – 463,Apr. 2003.
[89] J. Yang and D. B. Williams, “Transmission subspace tracking for MIMOsystems with low-rate feedback,” IEEE Trans. Comm., vol. 55(8), pp. 1629–1639, 2007.
[90] D. Sacristan-Murga and A. Pascual-Iserte, “Differential feedback of MIMOchannel Gram matrices based on geodesic curves,” IEEE Trans. WirelessComm., vol. 9(12), pp. 3714 – 3727, Dec. 2010.
[91] T. Inoue and R. W. Heath Jr., “Geodesic prediction for limited feedback mul-tiuser MIMO systems in temporally correlated channels,” in Proc. IEEE Ra-dio and Wireless Symposium, Jan. 2009, pp. 167–170.
[92] J. Choi, D. J. Love, and U. Madhow, “Limited feedback in massive MIMOsystems: Exploiting channel correlations via noncoherent trellis-codedquantization,” in Proc. Conf. Inf. Sci. Sys., Mar. 2013, pp. 1 – 6.
[93] J. Choi, B. Clerckx, and D. Love, “Differential codebook for general rotateddual-polarized MISO channels,” in Proc. IEEE GLOBECOM, Dec. 2012, pp.4222 – 4227.
[94] V. Raghavan, V. Veeravalli, and A. Sayeed, “Quantized multimode precodingin spatially correlated multiantenna channels,” IEEE Trans. Sign. Proc.,vol. 56(12), pp. 6017 – 6030, Dec. 2008.
[95] X. Wang, B. Mondal, E. Visotsky, and A. Ghosh, “Coordinated schedulingand network architecture for LTE macro and small cell deployments,” inProc. IEEE ICC Workshop, Jun. 2014, pp. 604 – 609.
[96] D. Jaramillo-Ramirez, M. Kountouris, and E. Hardouin, “Coordinatedmulti-point transmission with imperfect CSI and other-cell interference,”IEEE Trans. Wireless Comm., vol. 14, no. 4, pp. 1882 – 1896, Apr. 2015.
[97] B. Mondal, E. Visotsky, T. A. Thomas, X. Wang, and more authors, “Per-formance of downlink CoMP in LTE under practical constraints,” in Proc.IEEE Personal, Indoor and Mobile Radio Conference, Sep. 2012, pp. 2049 –2054.
[98] A. Davydov, G. Morozov, I. Bolotin, and A. Papathanassiou, “Evaluation ofjoint transmission CoMP in C-RAN based LTE-A HetNets with large coor-dination areas,” in Proc. IEEE GLOBECOM Workshop, Dec. 2013, pp. 801 –806.
[99] J. Li, T. Eriksson, T. Svensson, and C. Botella, “Power allocation for two-celltwo-user joint transmission,” IEEE Comm. Lett., vol. 16(9), pp. 1474 – 1477,Jul. 2012.
91
Page 98
Errata
Publication I
Table I, last column, components with s missing normalization by 1/√2.
Equation (5), first product ranges k = 1 to Ns − 1.
Publication III
In equation (8), the parameter t = 1.
93
Page 99
-otl
aA
DD
3
32
/ 6
102
+ajbbh
a*GMFTSH
9 NBSI 0-9117-06-259-879 )detnirp( NBSI 3-8117-06-259-879 )fdp(
L-NSSI 4394-9971 NSSI 4394-9971 )detnirp( NSSI 2494-9971 )fdp(
ytisrevinU otlaA
gnireenignE lacirtcelE fo loohcS scitsuocA dna gnissecorP langiS fo tnemtrapeD
if.otlaa.www
+ SSENISUB YMONOCE
+ TRA
+ NGISED ERUTCETIHCRA
+ ECNEICS
YGOLONHCET
REVOSSORC
LAROTCOD SNOITATRESSID
reb
ohcS
lor
aK
sme
tsys
OMI
M po
ol-d
esol
c rof
noit
ami
tse l
enna
hc d
na k
cabd
eef
deti
miL
yti
srev
in
U otl
aA
6102
scitsuocA dna gnissecorP langiS fo tnemtrapeD
dna kcabdeef detimiL rof noitamitse lennahc
smetsys OMIM pool-desolc
rebohcS loraK
LAROTCOD SNOITATRESSID