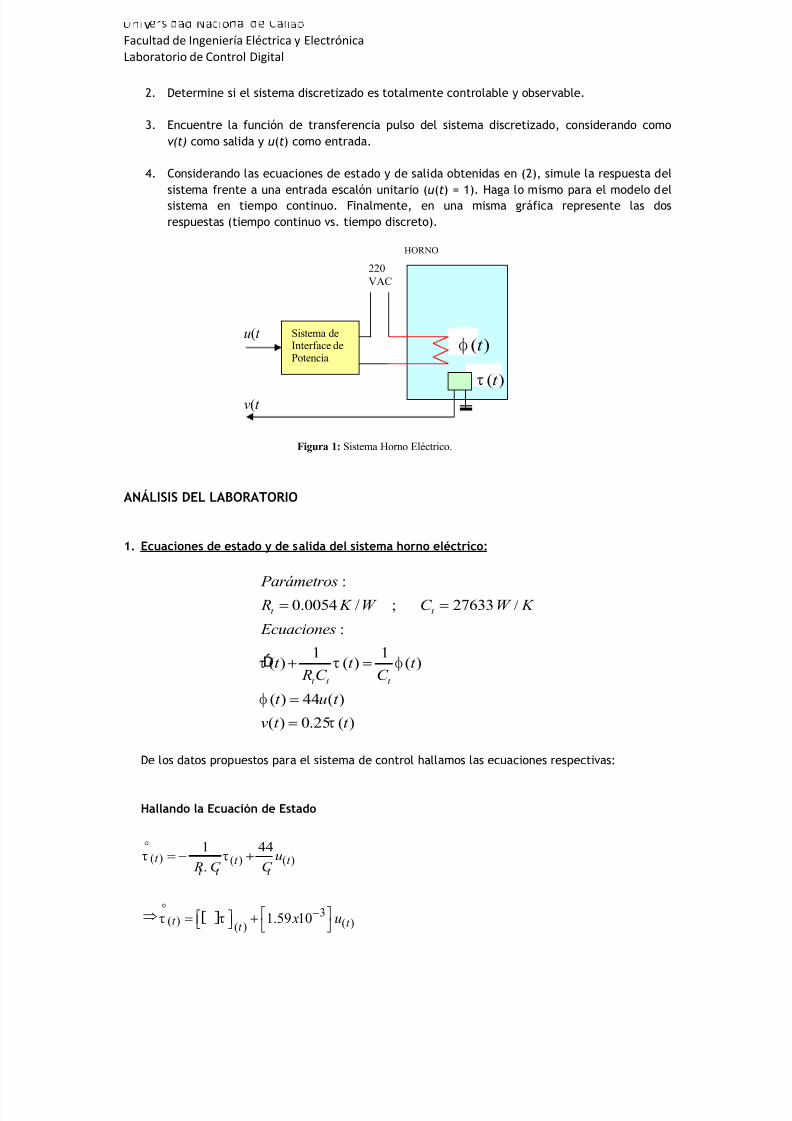
v Facultad de Ingeniería Eléctrica y Electrónica Laboratorio de Control Digital ) ( ) ( ) ( ) ( ) ( ) ( te D tx Cty te B tx A tx i i ! ! ) ( ) ( ) ( ) ( ) ( ) 1 ( ke D kx Cky ke Hkx G kx i i ! ! LABORATORIO N° 1 DISCRETIZACION Y SIMULACION DEL MODELO DE UN SISTEMA DE CONTROL DE TEMPERATURA OBJETIVOS: a)Obtener el modelo matemático en tiempo continuo y discreto de un sistema de temperatura. b)Simularla respuesta d elsistema anteuna entrada escalónunitario usando Matl ab,tanto entiempo continuo como entiempo discreto, que permita sucomparación y l a verificación deun adecuado proceso de discretización. PLANTEAMIENTO DEL PROBLEMA: La figura 1 representa un horno eléctrico, y lo quese desea escontrolarla temperatura enel horno a unnivel dereferencia. Elnivel detemperatura sesensa por medio d eunsensor detemperatura,cuyosterminalessetienen disponibles. La señ al deentrada delsistema enlazo abierto esu(t), y la salida disponibleesv(t). Rt y Ctsonl a resistencia térmica y la capacitancia térmica del horno,respectivamente. ) (tX esla temperatura enelinterior delhorno, y ) (tJ eselcal orentregado porla resistencia eléctrica. Los parámetros delsistema y ecuaciones son:PROCEDIMIENTO DE LABORATORIO:1.Determinelasecuaciones deestado y desalida delsistema horno eléctrico, que debe detenerla siguienteforma:Considerando losresultados del paso 1, determineelcorrespondientesistema discreto enla forma:para l o cualconsidereun adecuado período de muestreo. ) ( 25 . 0 ) ( ) ( 44 ) ( ) ( 1 ) ( 1 ) ( : / 27633 ; / 0054 . 0 : ttv tu ttCtCR tEcuaciones KWCWKR Parámetros tttttX J J X X ! ! ! ! !
3. Determinamos si el sistema discretizado es totalmente controlable y observable.
¿El sistema discretizado es totalmente controlable?
Con los valores obtenidos del sistema discretizado comprobamos si es totalmente controlable de
la siguiente forma:
? A5 5
1.592 10 1.591 10
( ) 2
M H GH
M x x
Rango M
!
« »!- ½
!
es completamente controlable@
¿El sistema discretizado es totalmente observable?
Al igual que lo anterior, también comprobamos si el sistema es totalmente observable, como a
continuación se muestra:
.
0.25
0.2498
( ) 2
d
d
C N
C G
N
Rango N
« »! ¬ ¼
- ½
« »! ¬ ¼
- ½
!
es completamente obsevable@
4. Encontramos la función de transferencia pulso del sistema discretizado, considerando comov(t) como salida y u(t) como entrada, de la siguiente manera:
De la teoría tenemos que la función transferencia pulso está dada por la relación entre la salida
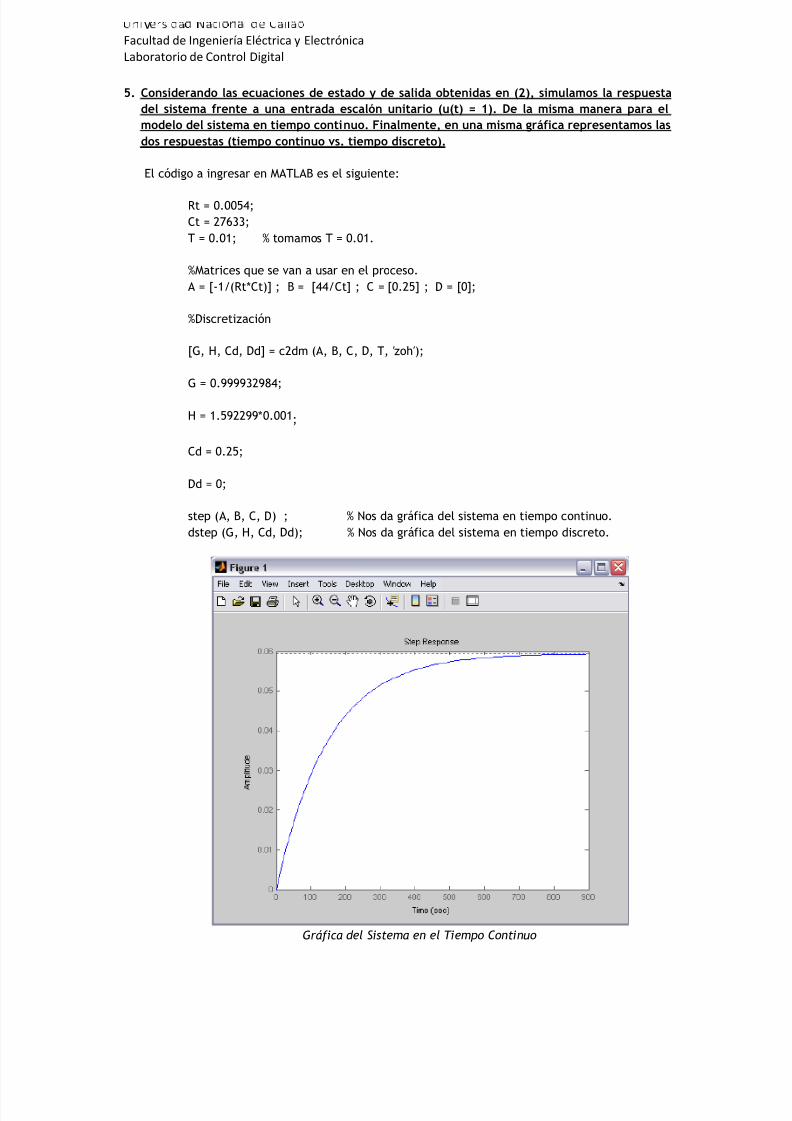
5. Considerando las ecuaciones de estado y de salida obtenidas en (2), simulamos la respuestadel sistema frente a una entrada escalón unitario (u(t) = 1). De la misma manera para elmodelo del sistema en tiempo continuo. Finalmente, en una misma gráfica representamos lasdos respuestas (tiempo continuo vs. tiempo discreto).
El código a ingresar en MATLAB es el siguiente:
Rt = 0.0054;
Ct = 27633;
T = 0.01; % tomamos T = 0.01.
%Matrices que se van a usar en el proceso.
A = [-1/(Rt*Ct)] ; B = [44/Ct] ; C = [0.25] ; D = [0];
%Discretización
[G, H, Cd, Dd] = c2dm (A, B, C, D, T, zoh);
G = 0.999932984;
H = 1.592299*0.001;
Cd = 0.25;
Dd = 0;
step (A, B, C, D) ; % Nos da gráfica del sistema en tiempo continuo.
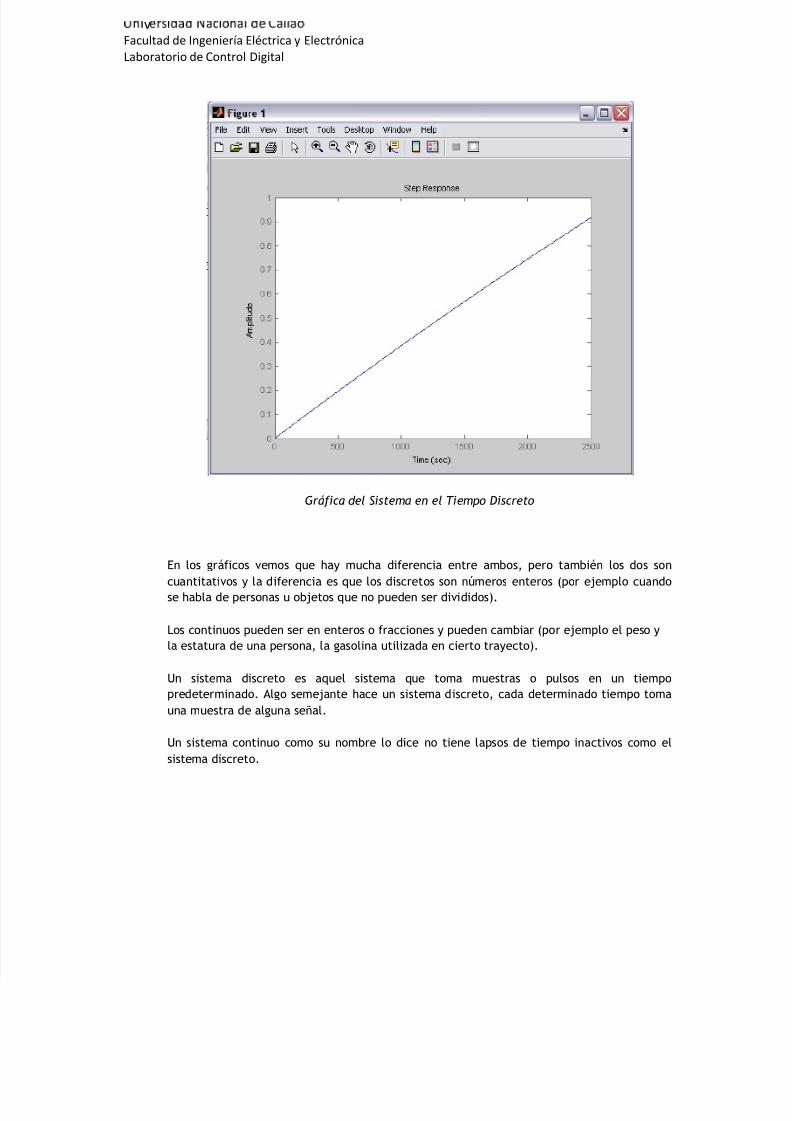
dstep (G, H, Cd, Dd); % Nos da gráfica del sistema en tiempo discreto.