Page 1
Learning and Policy Search in StochasticDynamical Systems with Bayesian
Neural Networks
Jose Miguel Hernandez–LobatoDepartment of Engineering
University of Cambridge
http://jmhl.org, [email protected]
Joint work with Stefan Depeweg, Finale Doshi-Velezand Steffen Udluft.
1 / 29
Page 2
We address the problem policy search in stochastic dynamical systems.
For example, to operate industrial systems such as gas turbines:
2 / 29
Page 3
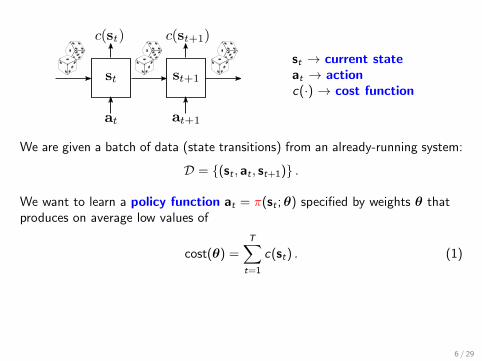
st → current stateat → actionc(·) → cost function
We are given a batch of data (state transitions) from an already-running system:
D = {(st , at , st+1)} .
We want to learn a policy function at = π(st ;θ) specified by weights θ thatproduces on average low values of
cost(θ) =T∑t=1
c(st) . (1)
Approach:
1 Learn a model for p(st+1|st , at = π(st ;θ)).
2 Minimize (1) across state trajectories (rollouts) generated by the model.
3 / 29
Page 4
st → current stateat → actionc(·) → cost function
We are given a batch of data (state transitions) from an already-running system:
D = {(st , at , st+1)} .
We want to learn a policy function at = π(st ;θ) specified by weights θ thatproduces on average low values of
cost(θ) =T∑t=1
c(st) . (1)
Approach:
1 Learn a model for p(st+1|st , at = π(st ;θ)).
2 Minimize (1) across state trajectories (rollouts) generated by the model.
4 / 29
Page 5
st → current stateat → actionc(·) → cost function
We are given a batch of data (state transitions) from an already-running system:
D = {(st , at , st+1)} .
We want to learn a policy function at = π(st ;θ) specified by weights θ thatproduces on average low values of
cost(θ) =T∑t=1
c(st) . (1)
Approach:
1 Learn a model for p(st+1|st , at = π(st ;θ)).
2 Minimize (1) across state trajectories (rollouts) generated by the model.
5 / 29
Page 6
st → current stateat → actionc(·) → cost function
We are given a batch of data (state transitions) from an already-running system:
D = {(st , at , st+1)} .
We want to learn a policy function at = π(st ;θ) specified by weights θ thatproduces on average low values of
cost(θ) =T∑t=1
c(st) . (1)
Approach:
1 Learn a model for p(st+1|st , at = π(st ;θ)).
2 Minimize (1) across state trajectories (rollouts) generated by the model.
6 / 29
Page 7
st → current stateat → actionc(·) → cost function
We are given a batch of data (state transitions) from an already-running system:
D = {(st , at , st+1)} .
We want to learn a policy function at = π(st ;θ) specified by weights θ thatproduces on average low values of
cost(θ) =T∑t=1
c(st) . (1)
Approach:
1 Learn a model for p(st+1|st , at = π(st ;θ)).
2 Minimize (1) across state trajectories (rollouts) generated by the model.
7 / 29
Page 8
What model to use for the stochastic dynamics?
Classic control theory assumes the most general of dynamical systems:
st+1 = f (st , at , zt ;W) , zt → stochastic disturbance ,
where f is a deterministic function parameterized by W.
In practice most works assume additive Gaussian noise:
st+1 = f (st , at ;W) + εt , εt ∼ N (0,Γ) .
We instead keep full generality and do not remove zt :
st+1 = f (st , at , zt ;W) + εt , zt ∼ N (0, 1), εt ∼ N (0,Γ) .
8 / 29
Page 9
What model to use for the stochastic dynamics?
Classic control theory assumes the most general of dynamical systems:
st+1 = f (st , at , zt ;W) , zt → stochastic disturbance ,
where f is a deterministic function parameterized by W.
In practice most works assume additive Gaussian noise:
st+1 = f (st , at ;W) + εt , εt ∼ N (0,Γ) .
We instead keep full generality and do not remove zt :
st+1 = f (st , at , zt ;W) + εt , zt ∼ N (0, 1), εt ∼ N (0,Γ) .
9 / 29
Page 10
What model to use for the stochastic dynamics?
Classic control theory assumes the most general of dynamical systems:
st+1 = f (st , at , zt ;W) , zt → stochastic disturbance ,
where f is a deterministic function parameterized by W.
In practice most works assume additive Gaussian noise:
st+1 = f (st , at ;W) + εt , εt ∼ N (0,Γ) .
We instead keep full generality and do not remove zt :
st+1 = f (st , at , zt ;W) + εt , zt ∼ N (0, 1), εt ∼ N (0,Γ) .
10 / 29
Page 11
Noise can have a significant effect in the optimal control. The drunken spider:
In industrial systems noise can arisefrom partial observability.
The zt are unobserved factors thataffect the dynamics in complex ways.
With no noise (alcohol), the optimal trajectory is to walk over the bridge.When noise is present, the optimal control is to walk around the lake.
Figure source H. J. Kappen, Path integrals and symmetry breaking for optimal control theory, 2008.
11 / 29
Page 12
Noise can have a significant effect in the optimal control. The drunken spider:
In industrial systems noise can arisefrom partial observability.
The zt are unobserved factors thataffect the dynamics in complex ways.
With no noise (alcohol), the optimal trajectory is to walk over the bridge.When noise is present, the optimal control is to walk around the lake.
Figure source H. J. Kappen, Path integrals and symmetry breaking for optimal control theory, 2008.
12 / 29
Page 13
Noise can have a significant effect in the optimal control. The drunken spider:
In industrial systems noise can arisefrom partial observability.
The zt are unobserved factors thataffect the dynamics in complex ways.
With no noise (alcohol), the optimal trajectory is to walk over the bridge.When noise is present, the optimal control is to walk around the lake.
Figure source H. J. Kappen, Path integrals and symmetry breaking for optimal control theory, 2008.
13 / 29
Page 14
st+1 = f (st , at , zt ;W) + εt , zt ∼ N (0, 1), εt ∼ N (0,Γ) .
Model f using Bayesian neural network, learn posterior distribution for W and the zt .
Likelihood:
p(Y |X,Γ,W, z) =N∏
n=1
[N (yn | f (xn, zn;W),Γ) ] .
Priors:
p(W) = N (W | 0, I) , p(z) = N (z |0, I) .
Posterior:
p(W,z |Y,X,Γ) = p(Y |X,Γ,W, z)p(W)p(z)
p(Y |X,Γ) .
Predictive distribution:
p(y? | x?,Y,X,Γ) =
∫N (y? | f (x?, z?;W),Γ)N (z?|0, 1)p(W,z |Y,X,Γ) dW dz dz? .
14 / 29
Page 15
st+1 = f (st , at , zt ;W) + εt , zt ∼ N (0, 1), εt ∼ N (0,Γ) .
Model f using Bayesian neural network, learn posterior distribution for W and the zt .
Likelihood:
p(Y |X,Γ,W, z) =N∏
n=1
[N (yn | f (xn, zn;W),Γ) ] .
Priors:
p(W) = N (W | 0, I) , p(z) = N (z |0, I) .
Posterior:
p(W,z |Y,X,Γ) = p(Y |X,Γ,W, z)p(W)p(z)
p(Y |X,Γ) .
Predictive distribution:
p(y? | x?,Y,X,Γ) =
∫N (y? | f (x?, z?;W),Γ)N (z?|0, 1)p(W,z |Y,X,Γ) dW dz dz? .
15 / 29
Page 16
st+1 = f (st , at , zt ;W) + εt , zt ∼ N (0, 1), εt ∼ N (0,Γ) .
Model f using Bayesian neural network, learn posterior distribution for W and the zt .
Likelihood:
p(Y |X,Γ,W, z) =N∏
n=1
[N (yn | f (xn, zn;W),Γ) ] .
Priors:
p(W) = N (W | 0, I) , p(z) = N (z |0, I) .
Posterior:
p(W,z |Y,X,Γ) = p(Y |X,Γ,W, z)p(W)p(z)
p(Y |X,Γ) .
Predictive distribution:
p(y? | x?,Y,X,Γ) =
∫N (y? | f (x?, z?;W),Γ)N (z?|0, 1)p(W,z |Y,X,Γ) dW dz dz? .
16 / 29
Page 17
st+1 = f (st , at , zt ;W) + εt , zt ∼ N (0, 1), εt ∼ N (0,Γ) .
Model f using Bayesian neural network, learn posterior distribution for W and the zt .
Likelihood:
p(Y |X,Γ,W, z) =N∏
n=1
[N (yn | f (xn, zn;W),Γ) ] .
Priors:
p(W) = N (W | 0, I) , p(z) = N (z |0, I) .
Posterior:
p(W,z |Y,X,Γ) = p(Y |X,Γ,W, z)p(W)p(z)
p(Y |X,Γ) .
Predictive distribution:
p(y? | x?,Y,X,Γ) =
∫N (y? | f (x?, z?;W),Γ)N (z?|0, 1)p(W,z |Y,X,Γ) dW dz dz? .
17 / 29
Page 18
st+1 = f (st , at , zt ;W) + εt , zt ∼ N (0, 1), εt ∼ N (0,Γ) .
Model f using Bayesian neural network, learn posterior distribution for W and the zt .
Likelihood:
p(Y |X,Γ,W, z) =N∏
n=1
[N (yn | f (xn, zn;W),Γ) ] .
Priors:
p(W) = N (W | 0, I) , p(z) = N (z |0, I) .
Posterior:
p(W,z |Y,X,Γ) = p(Y |X,Γ,W, z)p(W)p(z)
p(Y |X,Γ) .
Predictive distribution:
p(y? | x?,Y,X,Γ) =
∫N (y? | f (x?, z?;W),Γ)N (z?|0, 1)p(W,z |Y,X,Γ) dW dz dz? .
18 / 29
Page 19
st+1 = f (st , at , zt ;W) + εt , zt ∼ N (0, 1), εt ∼ N (0,Γ) .
Model f using Bayesian neural network, learn posterior distribution for W and the zt .
Likelihood:
p(Y |X,Γ,W, z) =N∏
n=1
[N (yn | f (xn, zn;W),Γ) ] .
Priors:
p(W) = N (W | 0, I) , p(z) = N (z |0, I) .
Posterior:
p(W,z |Y,X,Γ) = p(Y |X,Γ,W, z)p(W)p(z)
p(Y |X,Γ) .
Predictive distribution:
p(y? | x?,Y,X,Γ) =
∫N (y? | f (x?, z?;W),Γ)N (z?|0, 1)p(W,z |Y,X,Γ) dW dz dz? .
19 / 29
Page 20
We approximate p(W,z |Y,X,Γ) with a factorized Gaussian distribution q(W, z).
The marginal means and variances of q are adjusted by minimizing α-divergences:
VariationalBayes
0.5 10
q tends to fit a mode of p q tends to fit p globally
Expectationpropagation
20 / 29
Page 21
We approximate p(W,z |Y,X,Γ) with a factorized Gaussian distribution q(W, z).
The marginal means and variances of q are adjusted by minimizing α-divergences:
VariationalBayes
0.5 10
q tends to fit a mode of p q tends to fit p globally
Expectationpropagation
21 / 29
Page 22
We approximate p(W,z |Y,X,Γ) with a factorized Gaussian distribution q(W, z).
The marginal means and variances of q are adjusted by minimizing α-divergences:
VariationalBayes
0.5 10
q tends to fit a mode of p q tends to fit p globally
Expectationpropagation
22 / 29
Page 23
Predictions on toy problems
23 / 29
Page 24
Results on wetchicken problem
24 / 29
Page 25
Results on industrial benchmark
0 20 40 60 80Time
118
299
480
R(t
)
MLPsamples
sample mean
ground truth
0 20 40 60 80Time
118
299
480
R(t
)
V Bsamples
sample mean
ground truth
0 20 40 60 80Time
118
299
480
R(t
)
α = 0.5samples
sample mean
ground truth
0 20 40 60 80Time
196
514
831
R(t
)
MLPsamples
sample mean
ground truth
0 20 40 60 80Time
196
514
831
R(t
)
V Bsamples
sample mean
ground truth
0 20 40 60 80Time
196
514
831
R(t
)
α = 0.5samples
sample mean
ground truth
25 / 29
Page 26
Test log-likelihood and policy performance
Average test log-likelihood:
Dataset MLP VB α=0.5 α=1.0 GPWetChicken -1.755±0.003 -1.140±0.033 -1.057±0.014 -1.070±0.011 -1.722±0.011Turbine -0.868±0.007 -0.775±0.004 -0.746±0.013 -0.774±0.015 -2.663±0.131Industrial 0.767±0.047 1.132±0.064 1.328±0.108 1.326±0.098 0.724±0.04Avg. Rank 4.3±0.12 2.6±0.16 1.3±0.15 2.1±0.18 4.7±0.12
Average policy reward:
Dataset MLP VB α=0.5 α=1.0 GPWetchicken -2.71±0.09 -2.67±0.10 -2.37±0.01 -2.42±0.01 -3.05±0.06Turbine -0.65±0.14 -0.45±0.02 -0.41±0.03 -0.55±0.08 -0.64±0.18Industrial -183.5±4.1 -180.2±0.6 -174.2±1.1 -171.1±2.1 -285.2±20.5Avg. Rank 3.6±0.3 3.1±0.2 1.5±0.2 2.3±0.3 4.5±0.3
26 / 29
Page 27
Test log-likelihood and policy performance
Average test log-likelihood:
Dataset MLP VB α=0.5 α=1.0 GPWetChicken -1.755±0.003 -1.140±0.033 -1.057±0.014 -1.070±0.011 -1.722±0.011Turbine -0.868±0.007 -0.775±0.004 -0.746±0.013 -0.774±0.015 -2.663±0.131Industrial 0.767±0.047 1.132±0.064 1.328±0.108 1.326±0.098 0.724±0.04Avg. Rank 4.3±0.12 2.6±0.16 1.3±0.15 2.1±0.18 4.7±0.12
Average policy reward:
Dataset MLP VB α=0.5 α=1.0 GPWetchicken -2.71±0.09 -2.67±0.10 -2.37±0.01 -2.42±0.01 -3.05±0.06Turbine -0.65±0.14 -0.45±0.02 -0.41±0.03 -0.55±0.08 -0.64±0.18Industrial -183.5±4.1 -180.2±0.6 -174.2±1.1 -171.1±2.1 -285.2±20.5Avg. Rank 3.6±0.3 3.1±0.2 1.5±0.2 2.3±0.3 4.5±0.3
27 / 29
Page 28
Conclusions
Flexible models for stochastic dynamics are important for policy learning.
In particular,
1 flexibility and scalability can be achieved by using Bayesian neuralnetworks (BNNs) with stochastic input disturbances.
2 accurate approximate Bayesian inference can be obtained by minimizingα-divergences with α = 0.5.
3 we obtain state-of-the-art policies in industrial problems by optimizingacross rollouts sampled from our BNNs.
28 / 29