53
Please switch off mobile phones! Please switch off mobile phones!
| Date post: | 26-Mar-2015 |
| Category: |
Documents |
| Upload: | munkhbileg-ul |
| View: | 122 times |
| Download: | 7 times |
Please switch off mobile phones!Please switch off mobile phones!
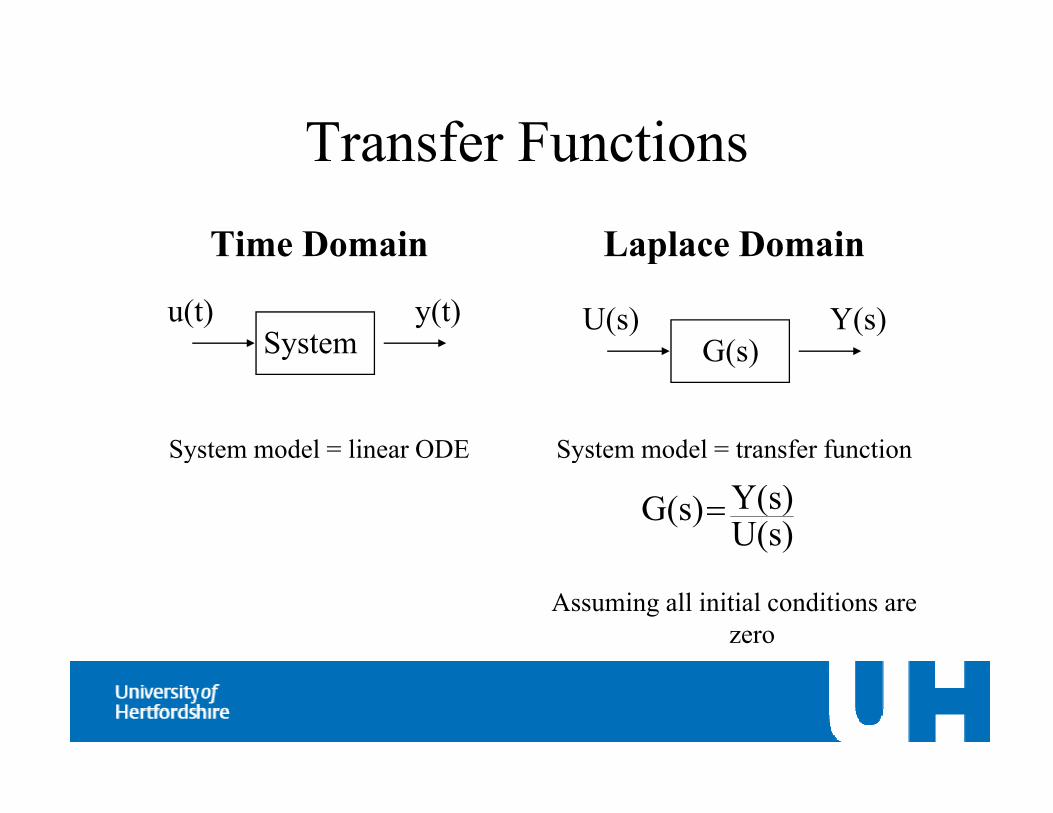
Transfer FunctionsTransfer FunctionsTime Domain Laplace DomainTime Domain Laplace Domain
U(s)G(s)
Y(s)u(t)System
y(t)
System model = linear ODE System model = transfer function
G(s)y
Sys e ode e O Sys e ode s e u c o
G(s) Y(s)U(s)
=
Assuming all initial conditions are zero

Transfer Function of a Standard 1st Order System
Assumptions
y( )0 0=T dydt
y Ku+ = y( )0 0=dt
( ) ( )( ) ( ) ( )T sY s y Y s KU s− + =0Solution ( ) ( )( ) ( ) ( )
( ) ( ) ( )
T sY s y Y s KU s
T Y KU
− + =0
1( ) ( ) ( )Ts Y s KU s+ =1
KsT+1
U(s) Y(s)
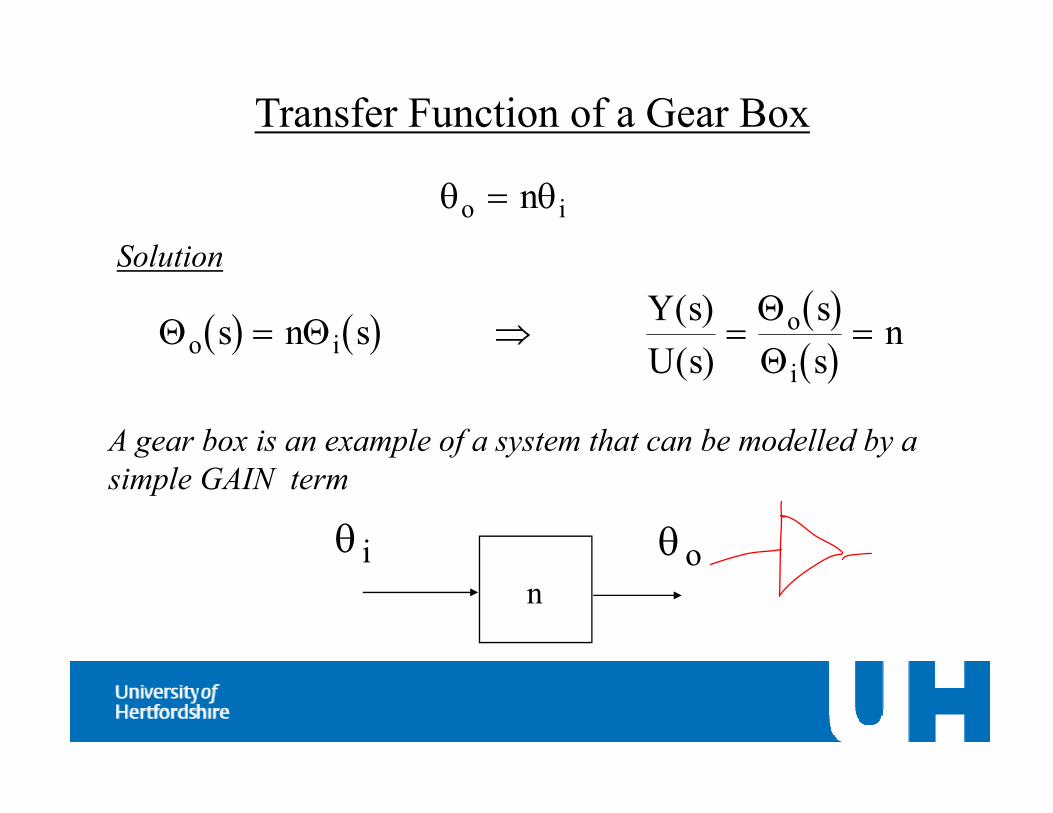
Transfer Function of a Gear Box
θ θo in=
Solution
( ) ( ) ( )( )
Θ ΘΘΘo i
os n s Y sU
s n= ⇒ = =( )( )
Solution
( )ΘiU s s( )
A gear box is an example of a system that can be modelled by a simple GAIN term
θ i θon
i o
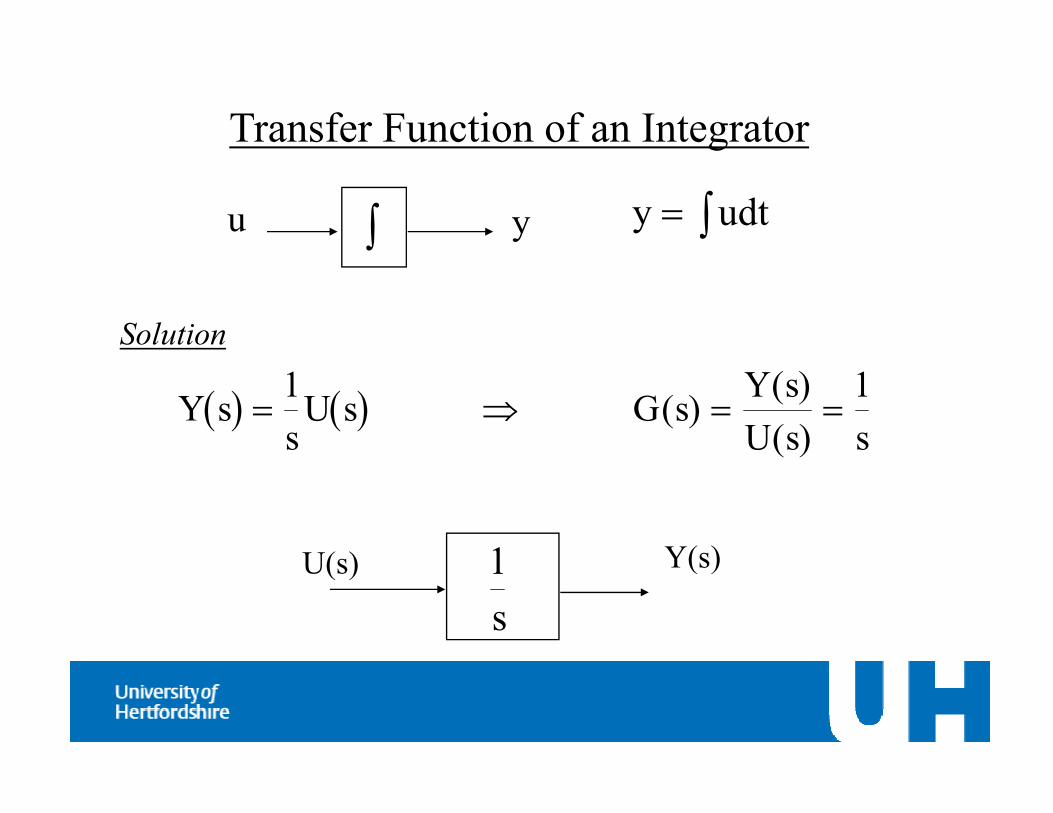
Transfer Function of an Integratorg
y udt= ∫∫u y
Solution
( ) ( )Y ss
U s G s Y sU s s
= ⇒ = =1 1( ) ( )
( )
1 Y(s)U(s) 1s
Y(s)U(s)

Lecture 5 - Block DiagramLecture 5 Block Diagram Manipulation
• Introduction of block manipulation.S i R l– Series Rule
– Closed Loop Rule– Blocks around summing junctions
Block Diagram Manipulation
• The idea is to use a set of rules to gradually reduce a complex system consisting of a p y gnumber of subsystems down to a single block that contains the transfer function for the whole system.
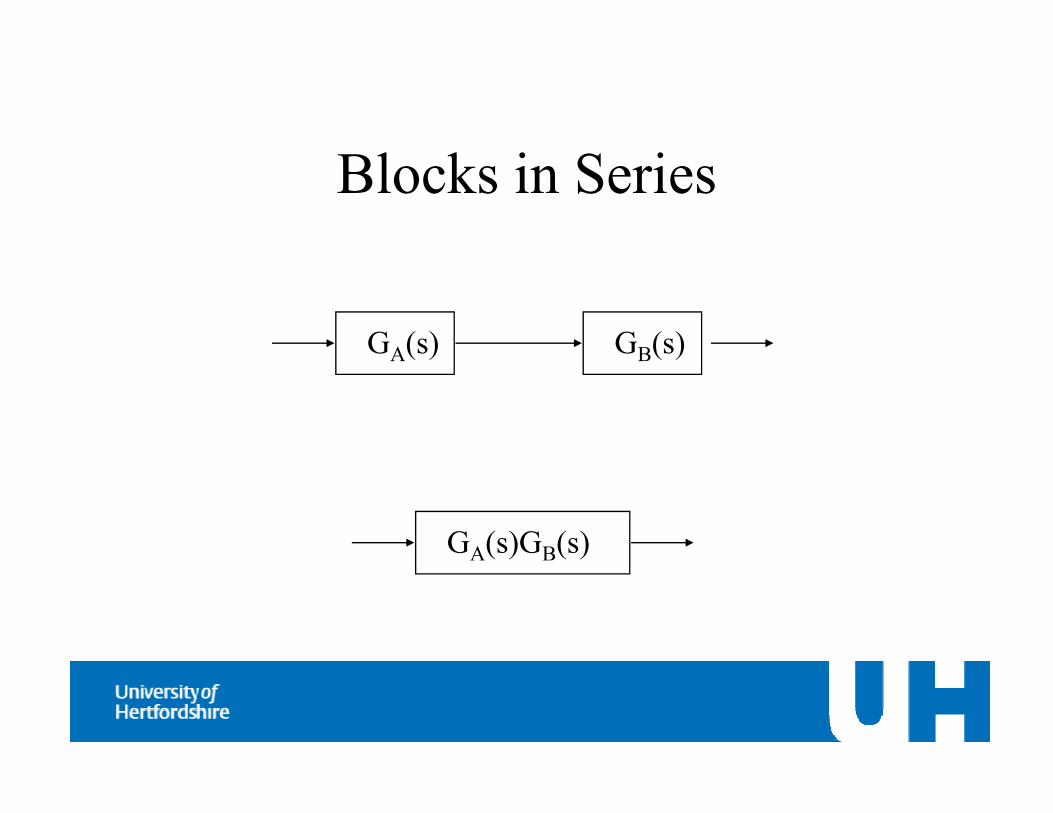
Blocks in Series
GA(s) GB(s)A( ) B( )
GA(s)GB(s)
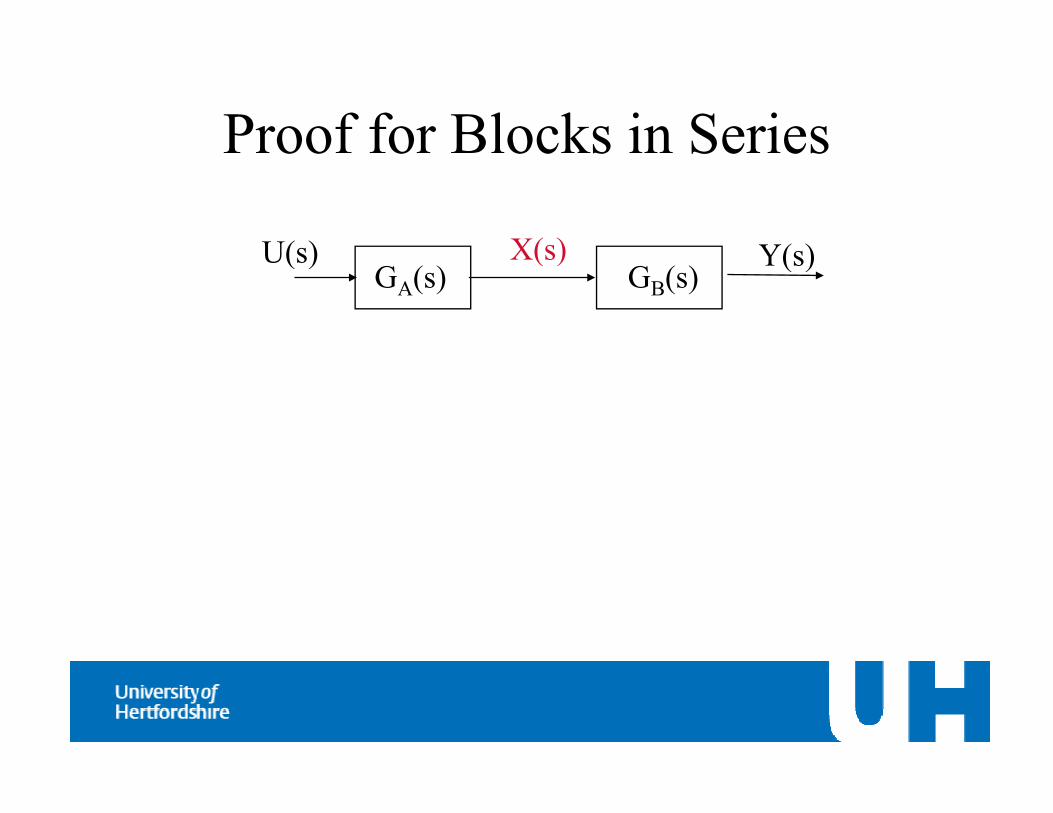
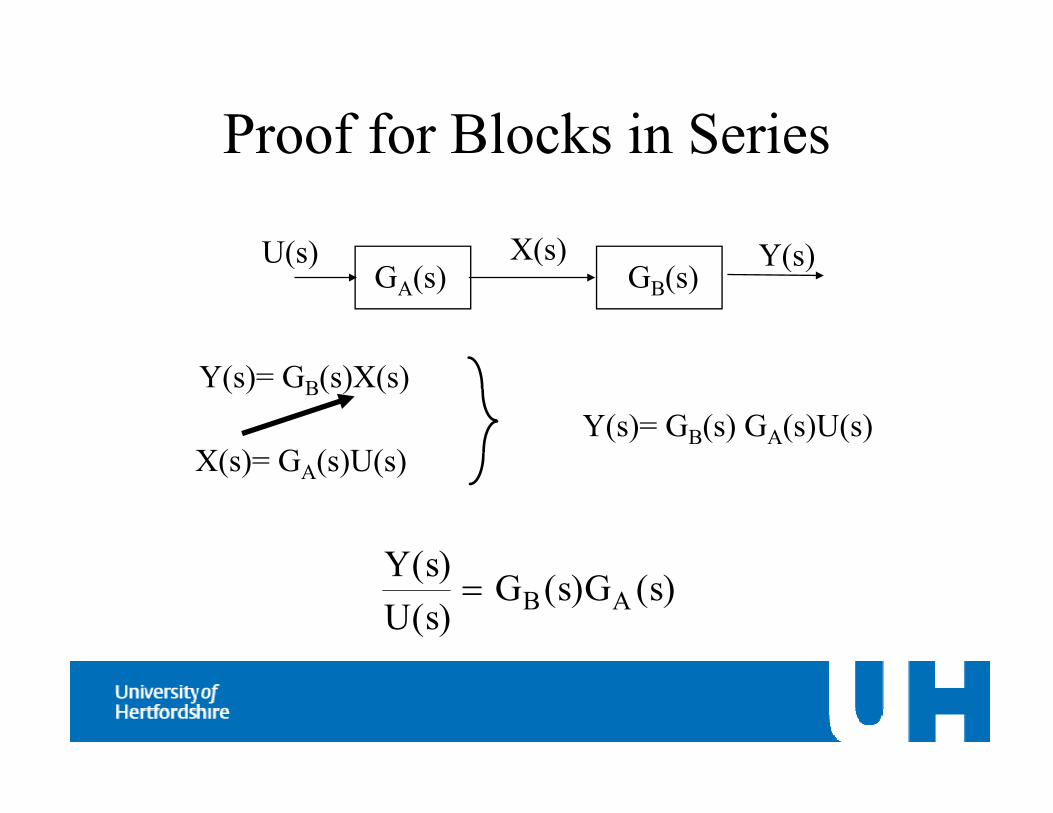
Proof for Blocks in Series
U(s) Y(s)X(s)
Proof for Blocks in Series
GA(s) GB(s)U(s) Y(s)X(s)
Proof for Blocks in Series
U(s) Y(s)X(s)
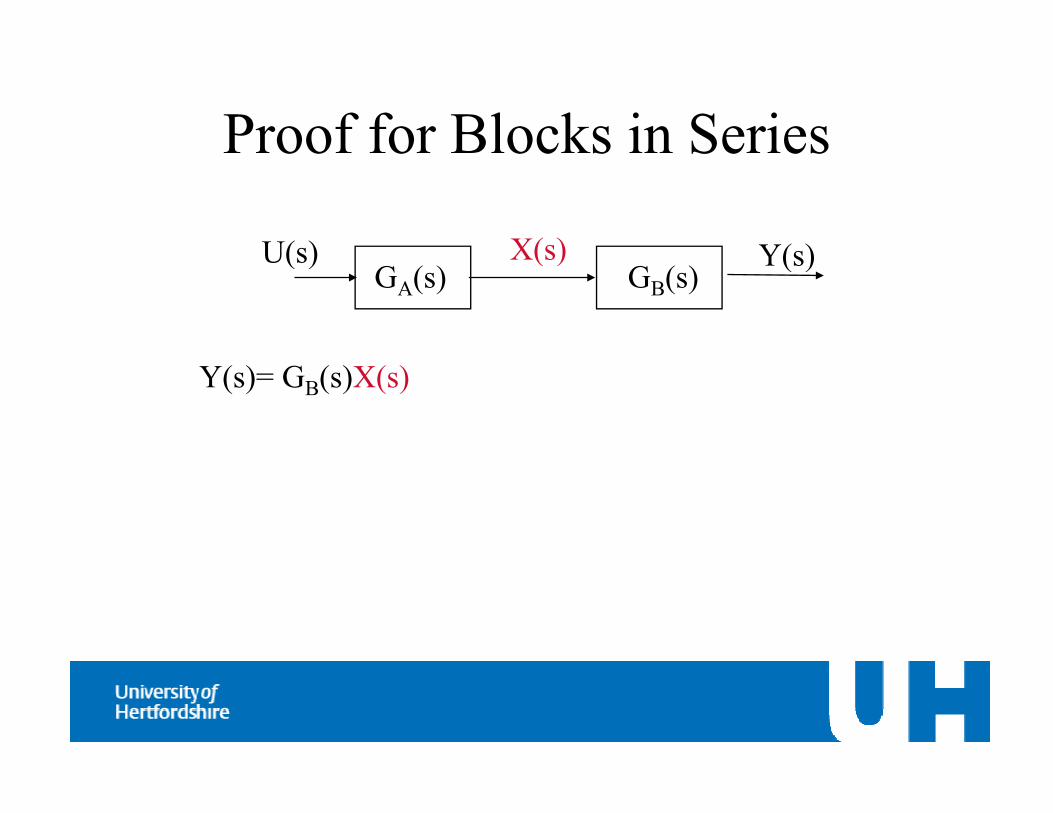
Proof for Blocks in Series
GA(s) GB(s)U(s) Y(s)X(s)
Y(s)= GB(s)X(s)

Proof for Blocks in Series
U(s) Y(s)X(s)
Proof for Blocks in Series
GA(s) GB(s)U(s) Y(s)X(s)
X(s)= G (s)U(s)
Y(s)= GB(s)X(s)
X(s)= GA(s)U(s)

Proof for Blocks in Series
U(s) Y(s)X(s)
Proof for Blocks in Series
GA(s) GB(s)U(s) Y(s)X(s)
X(s)= G (s)U(s)
Y(s)= GB(s)X(s)Y(s)= GB(s) GA(s)U(s)
X(s)= GA(s)U(s)
Proof for Blocks in Series
U(s) Y(s)X(s)
Proof for Blocks in Series
GA(s) GB(s)U(s) Y(s)X(s)
X(s)= G (s)U(s)
Y(s)= GB(s)X(s)Y(s)= GB(s) GA(s)U(s)
X(s)= GA(s)U(s)
Y s( )Y sU s
G s G sB A( )( )
( ) ( )=
Proof for Blocks in Series
U(s) Y(s)X(s)
Proof for Blocks in Series
GA(s) GB(s)U(s) Y(s)X(s)
X(s)= G (s)U(s)
Y(s)= GB(s)X(s)Y(s)= GB(s) GA(s)U(s)
X(s)= GA(s)U(s)
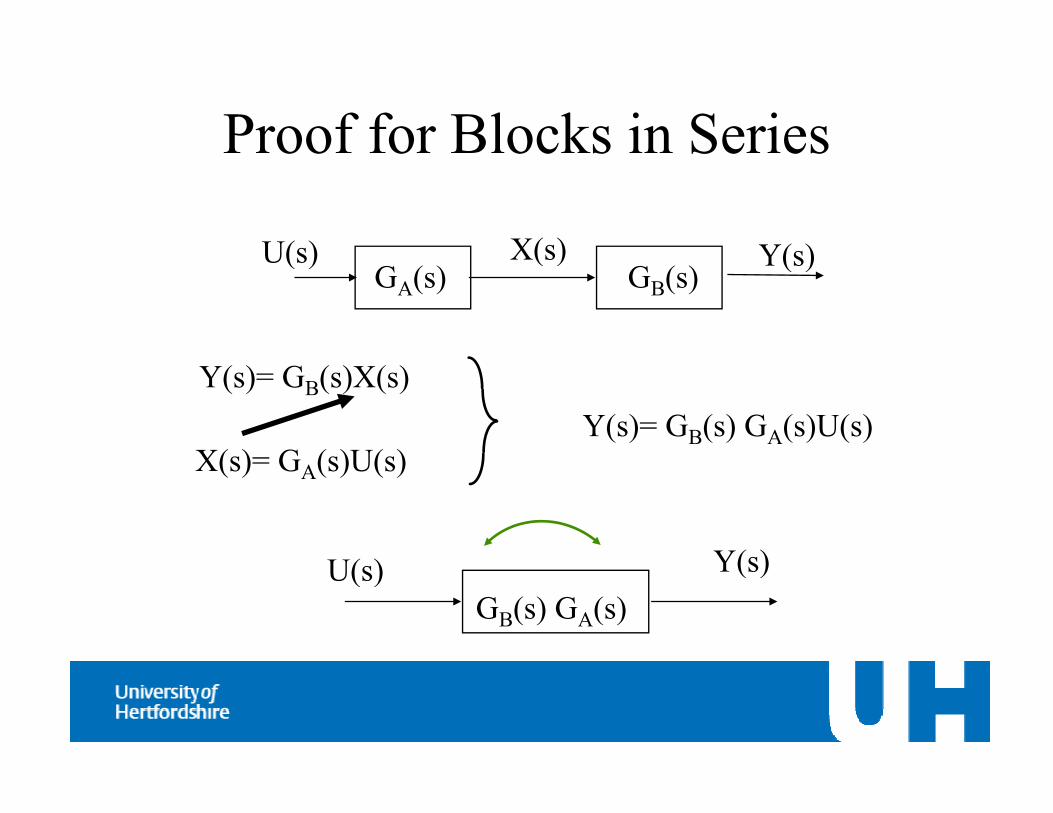
U( ) Y(s)U(s) Y(s)GB(s) GA(s)

Proof for Blocks in Series
U(s) Y(s)X(s)
Proof for Blocks in Series
GA (s) GB (s)U(s) Y(s)X(s)
X(s)= G (s)U(s)
Y(s)= GB (s)X(s)Y(s)= GB (s) GA (s)U(s)
X(s)= GA (s)U(s)
U( ) Y(s)U(s) Y(s)GA (s) GB (s)
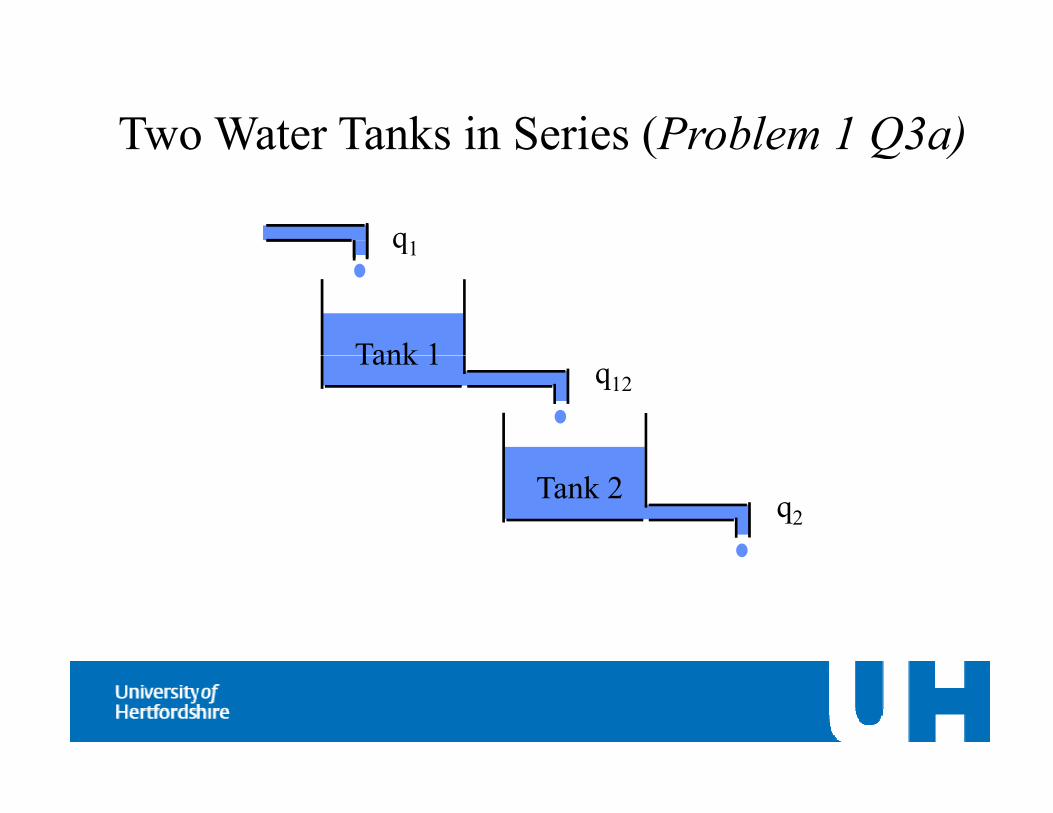
Two Water Tanks in Series (Problem 1 Q3a)
q1
( Q )
Tank 1
q1
Tank 1 q12
Tank 2 q2
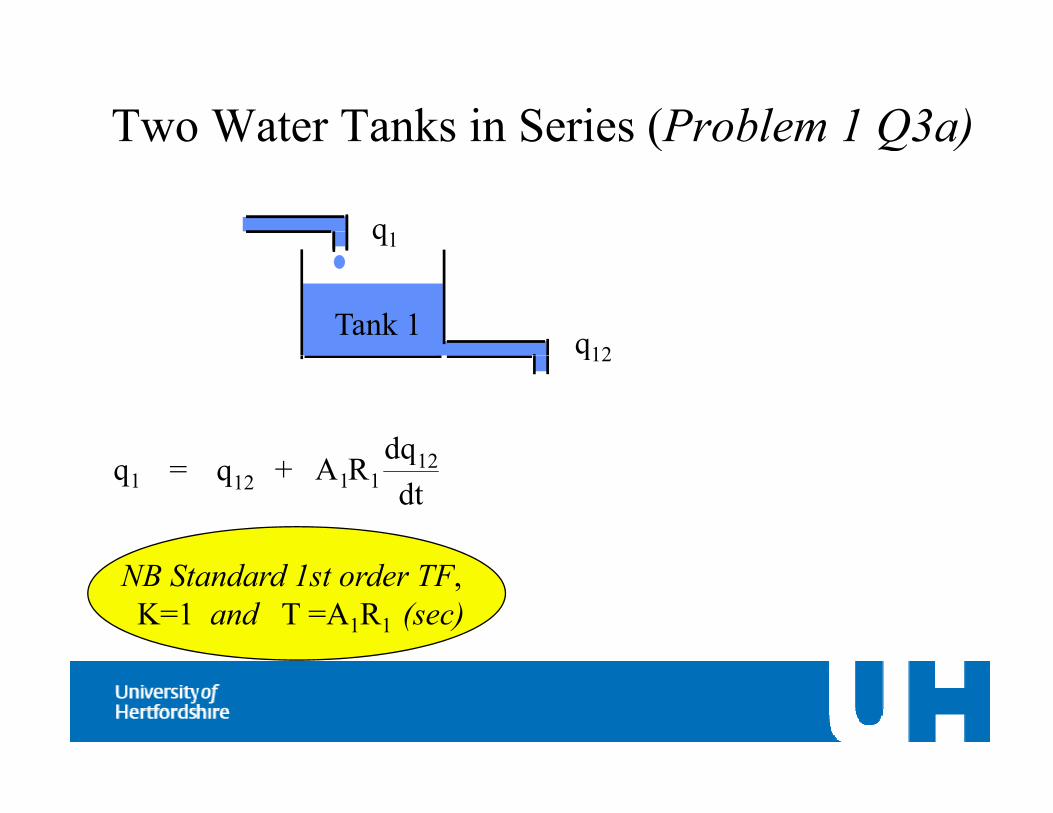
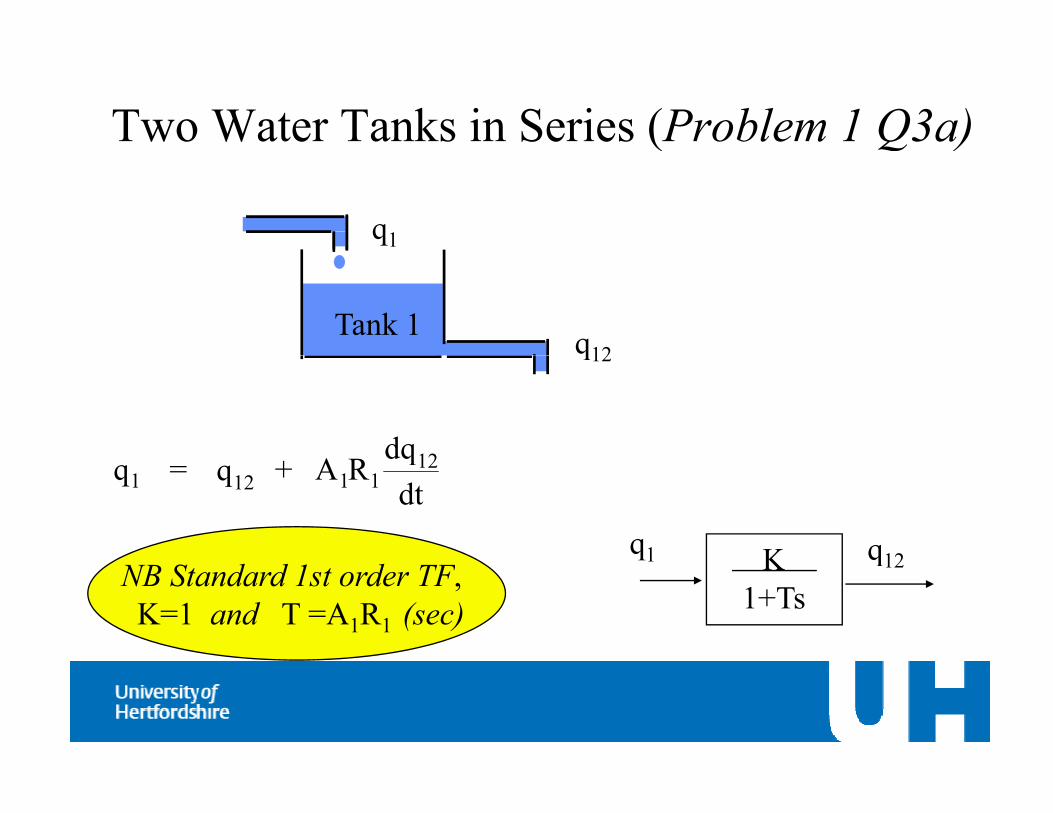
Two Water Tanks in Series (Problem 1 Q3a)
q1
( Q )
Tank 1 q12q12
12dqq1 12 1 1
12 = q + A Rdqdt
NB Standard 1st order TF,K=1 and T =A1R1 (sec)
Two Water Tanks in Series (Problem 1 Q3a)
q1
( Q )
Tank 1 q12q12
12dq
K q12q1
q1 12 1 112 = q + A R
dqdt
K1+Ts
q121NB Standard 1st order TF,K=1 and T =A1R1 (sec)

Two Water Tanks in Series (Problem 1 Q3a)
q1
( Q )
Tank 1 q12q12
12dq
1 q12q1
q1 12 1 112 = q + A R
dqdt
11+T1s
q121NB Standard 1st order TF,K=1 and T =A1R1 (sec)

Two Water Tanks in Series (Problem 1 Q3a)
q1
( Q )
Tank 1 q12q12
Tank 2 q
1 1q2q12q1
q2
11+T1s
11+T2 s
q12q1

Two Water Tanks in Series (Problem 1 Q3a)
q1
( Q )
Tank 1 q12q12
Tank 2 q
1 q2q1
q2
111+T1s
q1 11+T2s
×
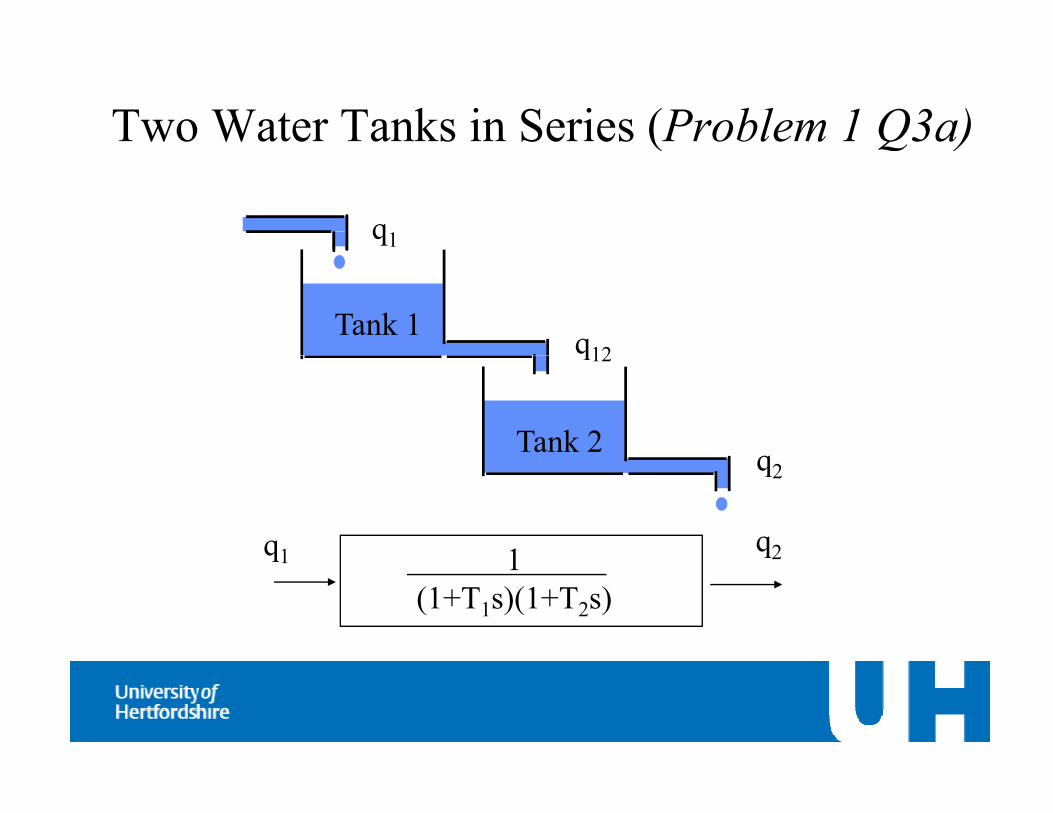
Two Water Tanks in Series (Problem 1 Q3a)
q1
( Q )
Tank 1 q12q12
Tank 2 q
1 q2q1
q2
1(1+T1s)(1+T2s)
q1

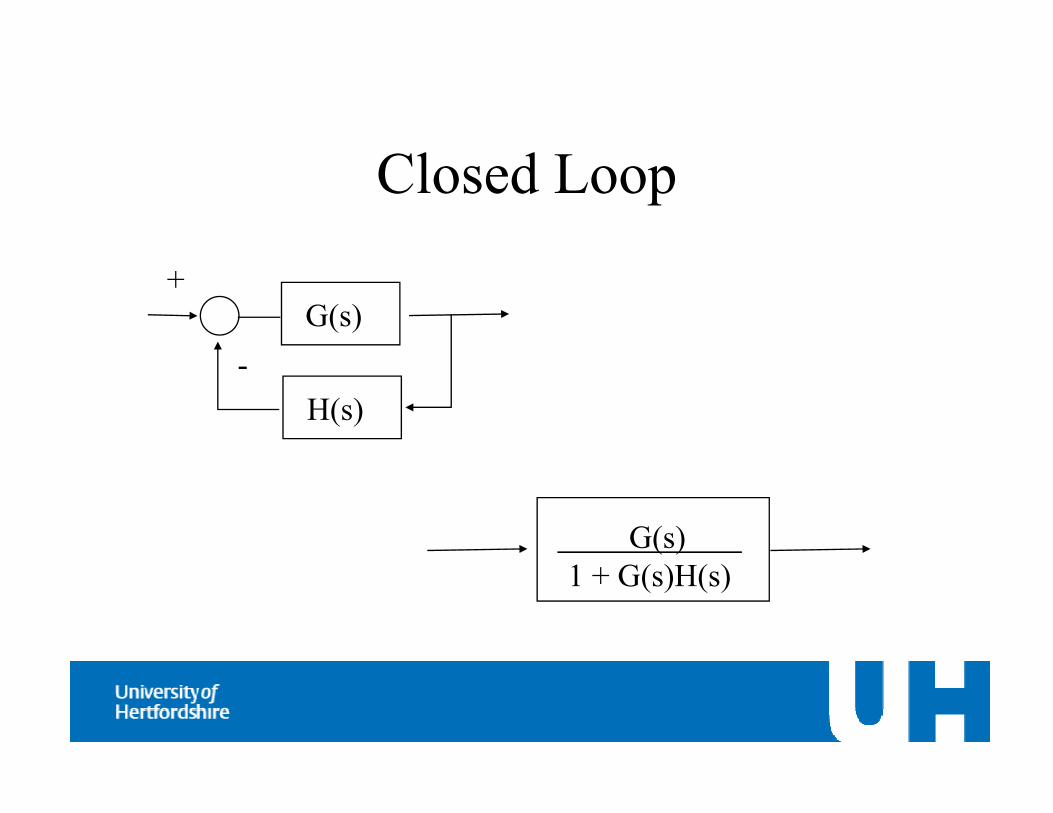
Closed Loop
G(s)+
-H(s)
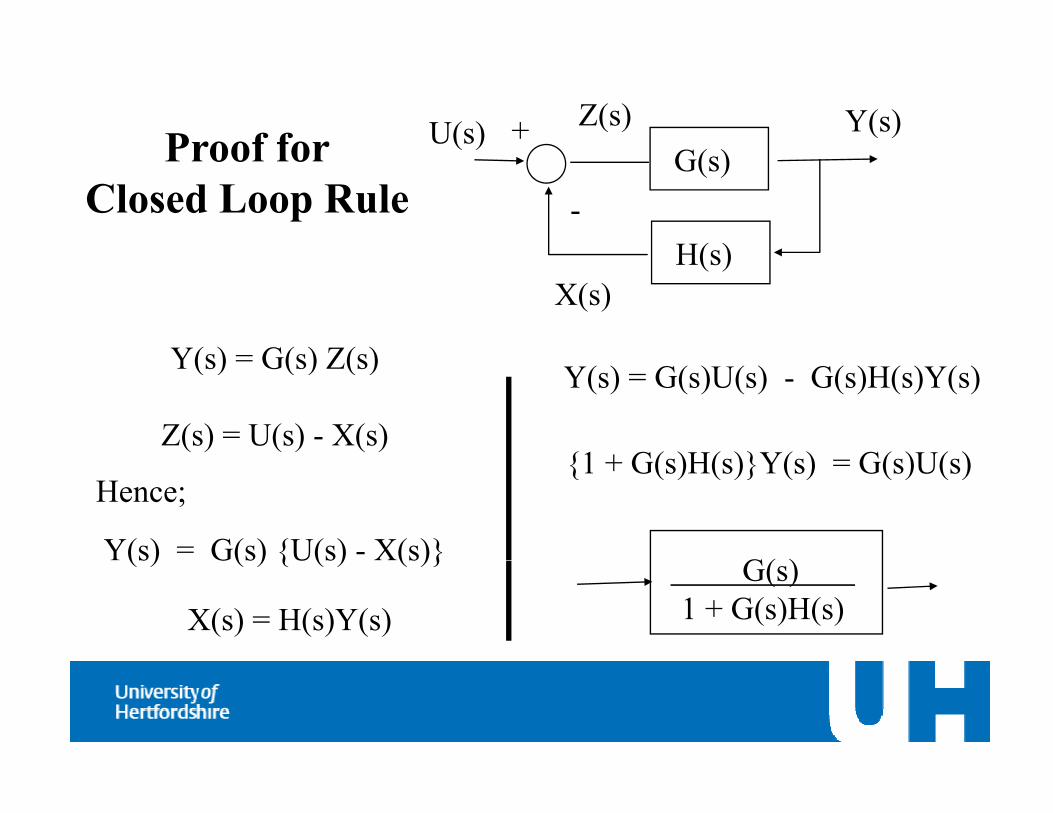
G(s) 1 + G(s)H(s)
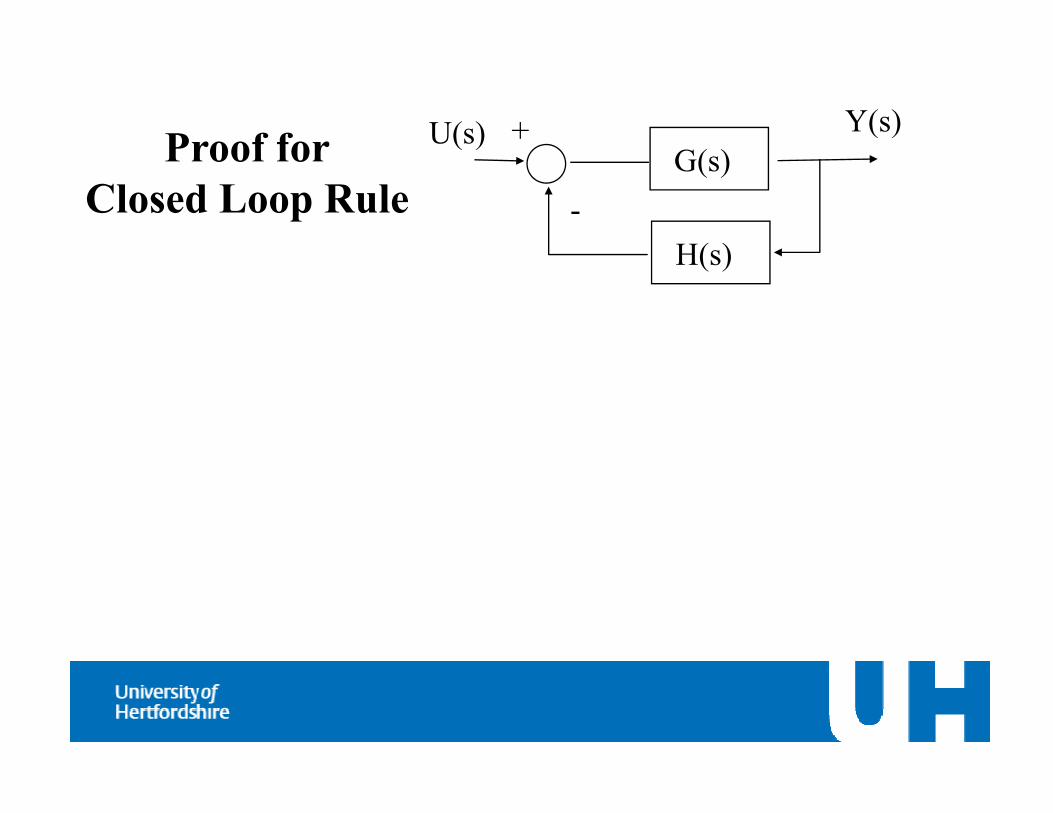
G( )+U(s) Y(s)
Proof for G(s)-
H(s)
Proof forClosed Loop Rule
H(s)
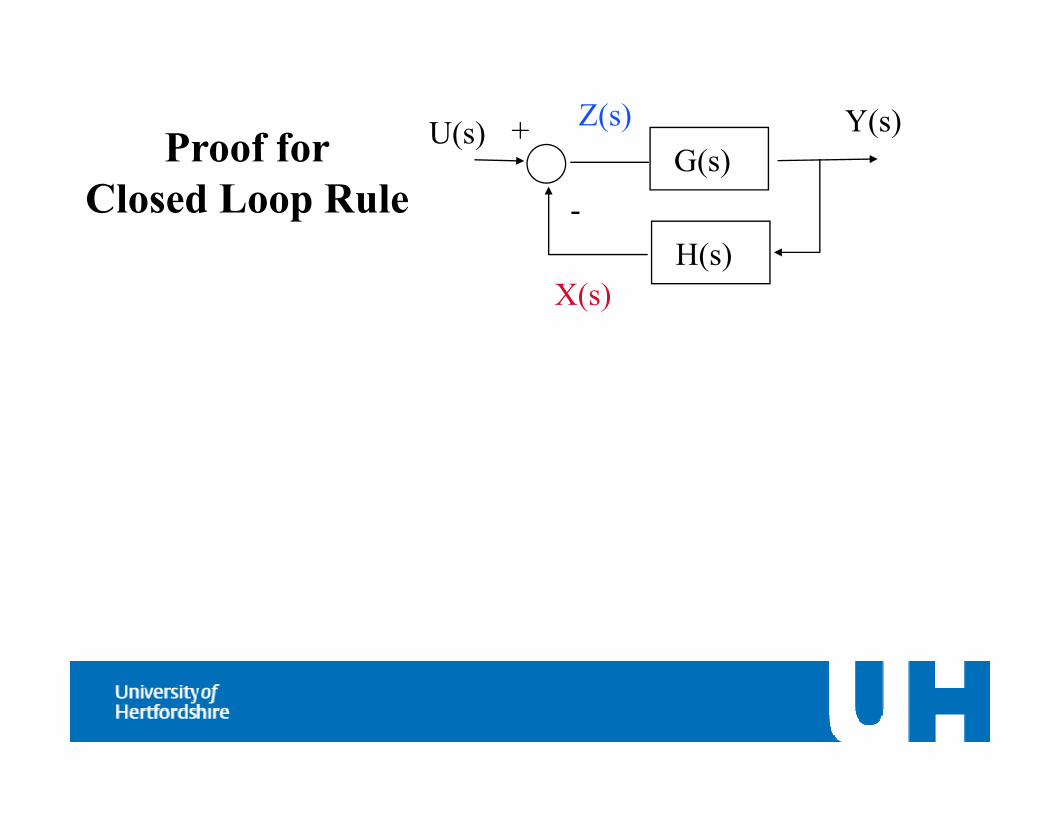
G( )+U(s) Y(s)Z(s)
Proof for G(s)-
H(s)
Proof forClosed Loop Rule
H(s)X(s)
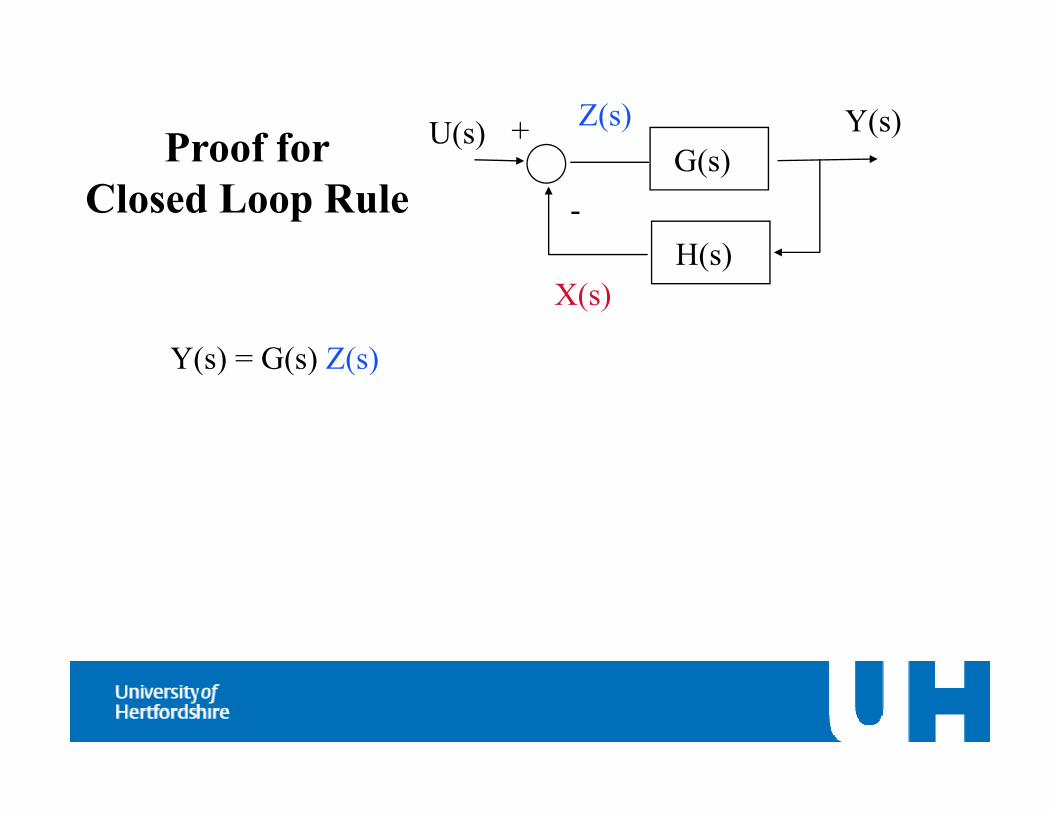
G( )+U(s) Y(s)Z(s)
Proof for G(s)-
H(s)
Proof forClosed Loop Rule
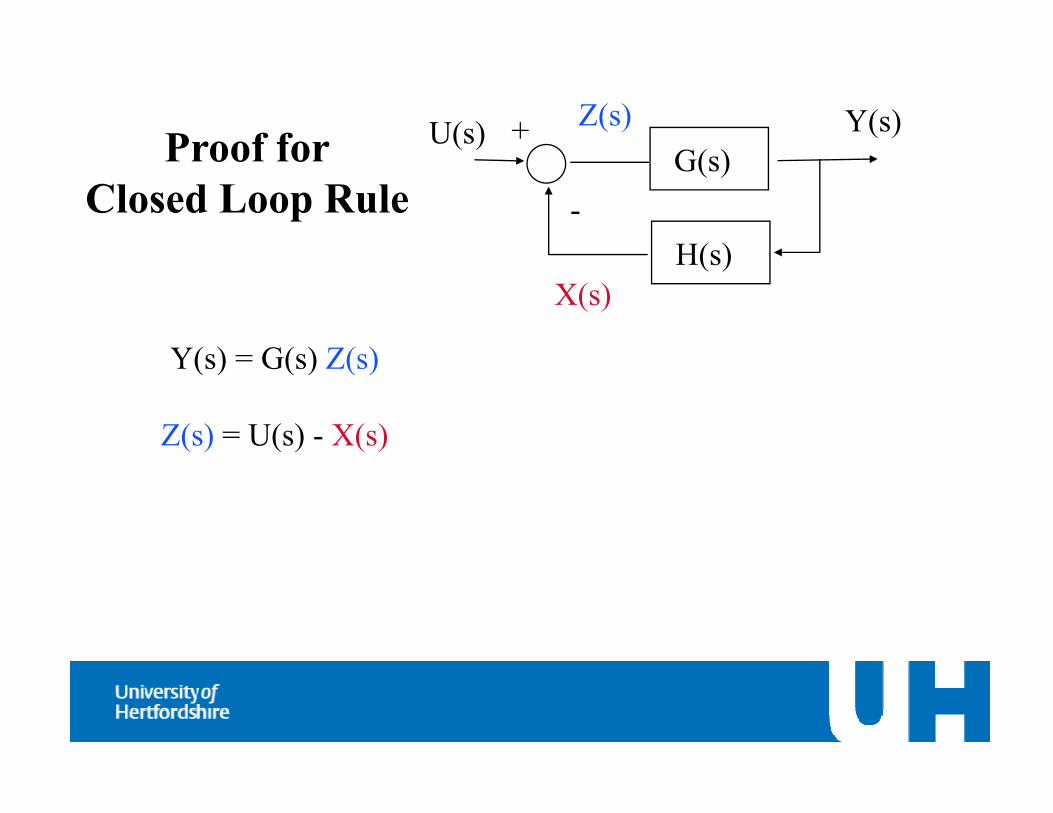
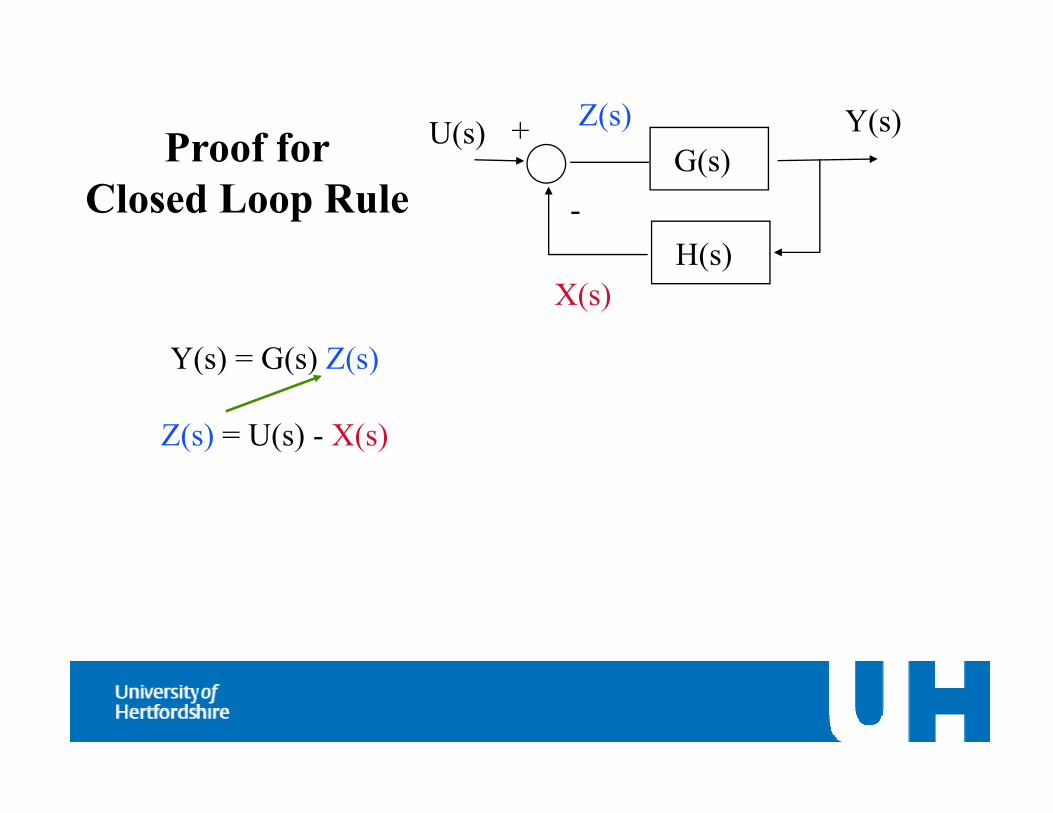
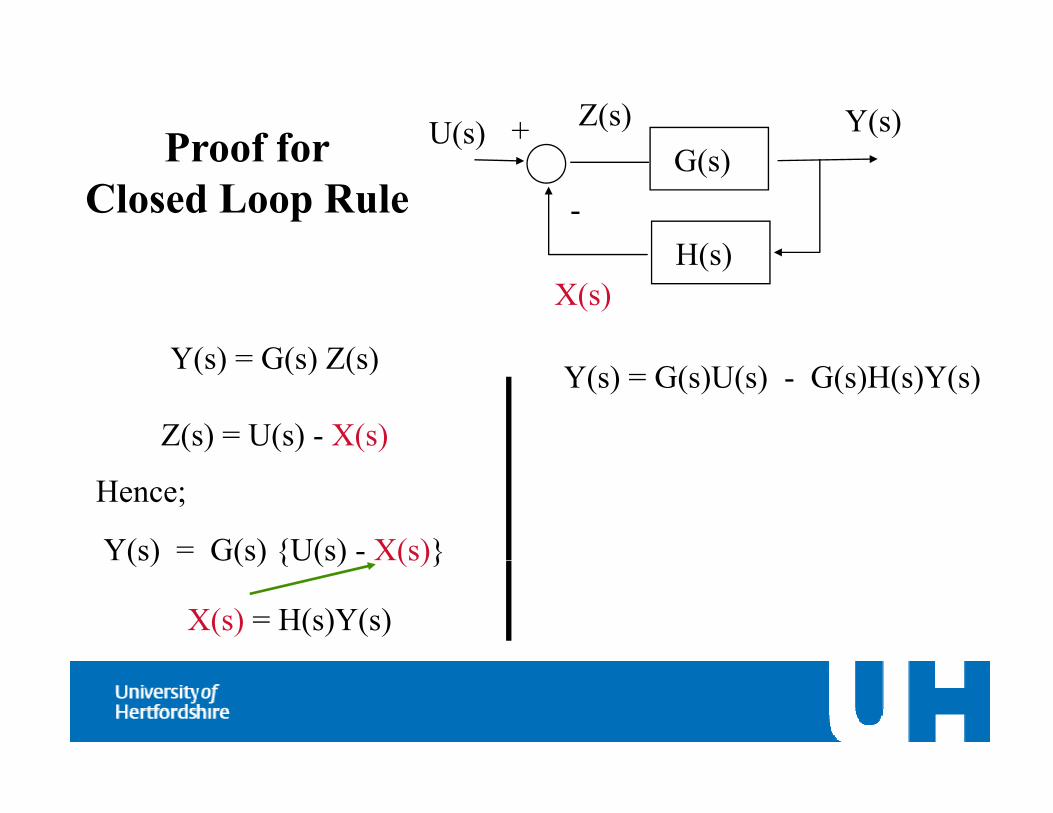
Y(s) = G(s) Z(s)
H(s)X(s)
Y(s) = G(s) Z(s)
G( )+U(s) Y(s)Z(s)
Proof for G(s)-
H(s)
Proof forClosed Loop Rule
Y(s) = G(s) Z(s)
H(s)X(s)
Y(s) = G(s) Z(s)
Z(s) = U(s) - X(s)
G( )+U(s) Y(s)Z(s)
Proof for G(s)-
H(s)
Proof forClosed Loop Rule
Y(s) = G(s) Z(s)
H(s)X(s)
Y(s) = G(s) Z(s)
Z(s) = U(s) - X(s)

G( )+U(s) Y(s)Z(s)
Proof for G(s)-
H(s)
Proof forClosed Loop Rule
Y(s) = G(s) Z(s)
H(s)X(s)
Y(s) = G(s) Z(s)
Z(s) = U(s) - X(s)
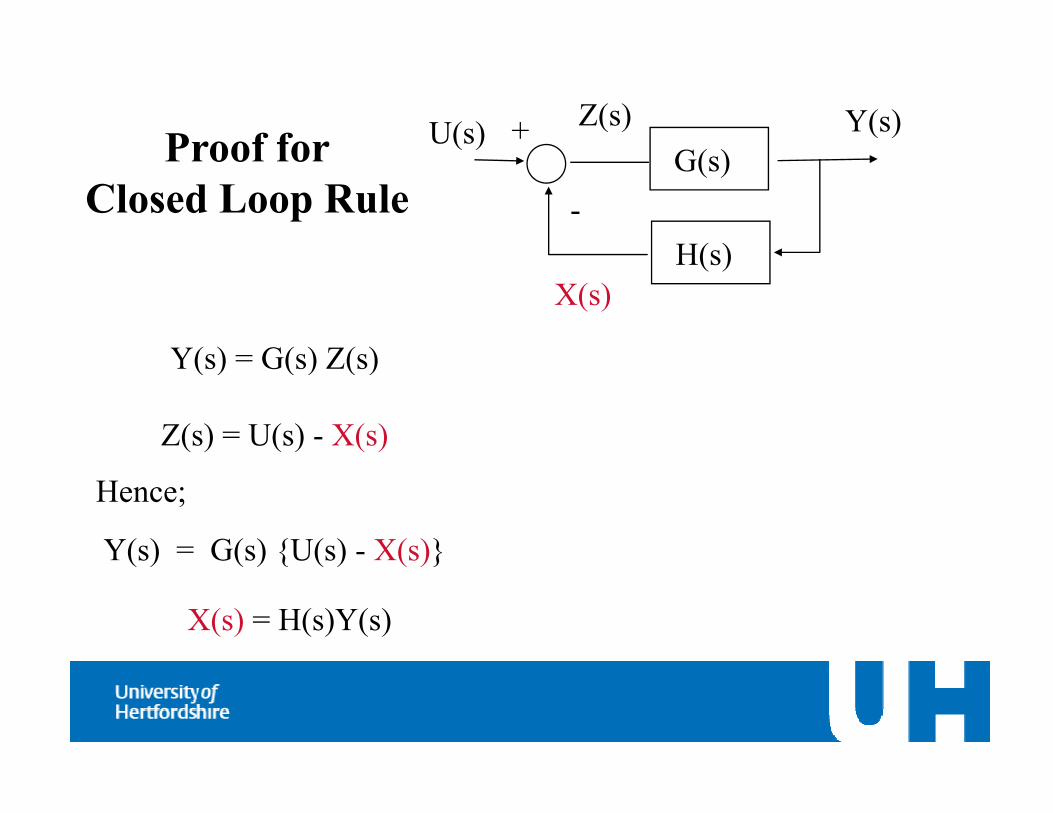
Y(s) = G(s) {U(s) - X(s)}
Hence;
(s) G(s) {U(s) (s)}
G( )+U(s) Y(s)Z(s)
Proof for G(s)-
H(s)
Proof forClosed Loop Rule
Y(s) = G(s) Z(s)
H(s)X(s)
Y(s) = G(s) Z(s)
Z(s) = U(s) - X(s)
Y(s) = G(s) {U(s) - X(s)}
Hence;
(s) G(s) {U(s) (s)}
X(s) = H(s)Y(s)

G( )+U(s) Y(s)Z(s)
Proof for G(s)-
H(s)
Proof forClosed Loop Rule
Y(s) = G(s) Z(s)
H(s)X(s)
Y(s) = G(s) Z(s)
Z(s) = U(s) - X(s)
Y(s) = G(s) {U(s) - X(s)}
Hence;
(s) G(s) {U(s) (s)}
X(s) = H(s)Y(s)
G( )+U(s) Y(s)Z(s)
Proof for G(s)-
H(s)
Proof forClosed Loop Rule
H(s)X(s)
Y(s) = G(s) Z(s)Y(s) = G(s) Z(s)
Z(s) = U(s) - X(s)
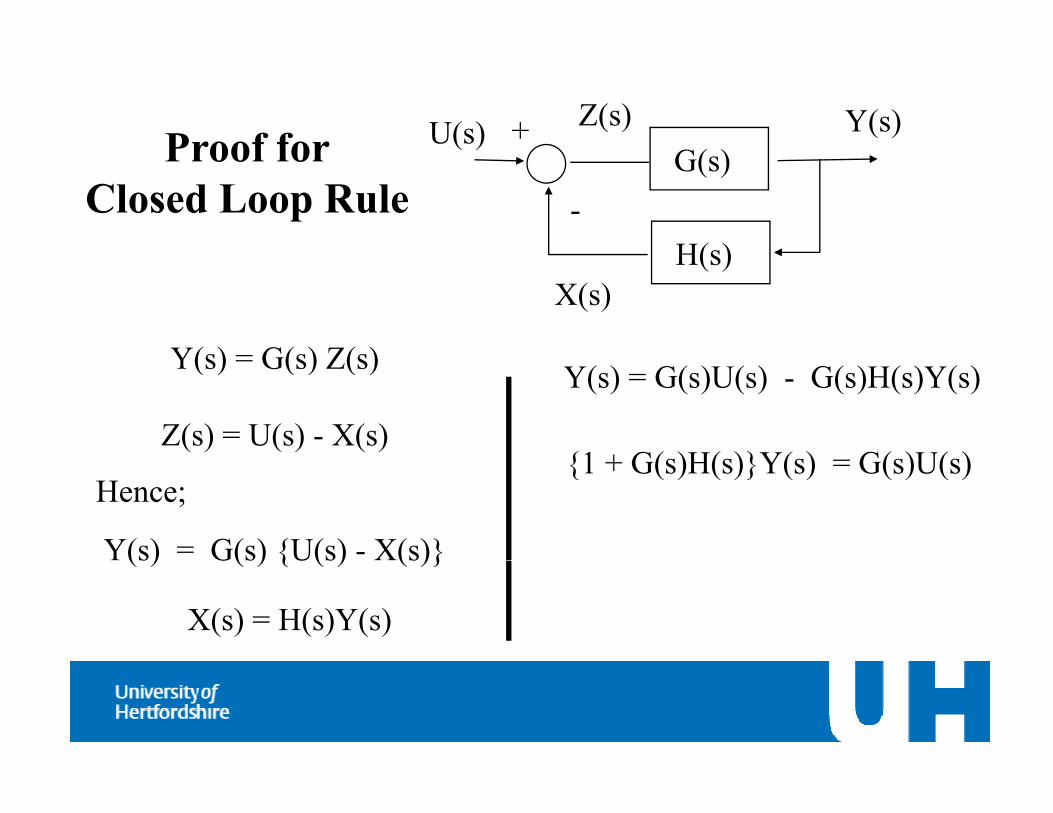
Y(s) = G(s)U(s) - G(s)H(s)Y(s)
Y(s) = G(s) {U(s) - X(s)}
Hence;
(s) G(s) {U(s) (s)}
X(s) = H(s)Y(s)
G( )+U(s) Y(s)Z(s)
Proof for G(s)-
H(s)
Proof forClosed Loop Rule
H(s)X(s)
Y(s) = G(s) Z(s)Y(s) = G(s) Z(s)
Z(s) = U(s) - X(s)
Y(s) = G(s)U(s) - G(s)H(s)Y(s)
{1 + G( )H( )}Y( ) G( )U( )
Y(s) = G(s) {U(s) - X(s)}
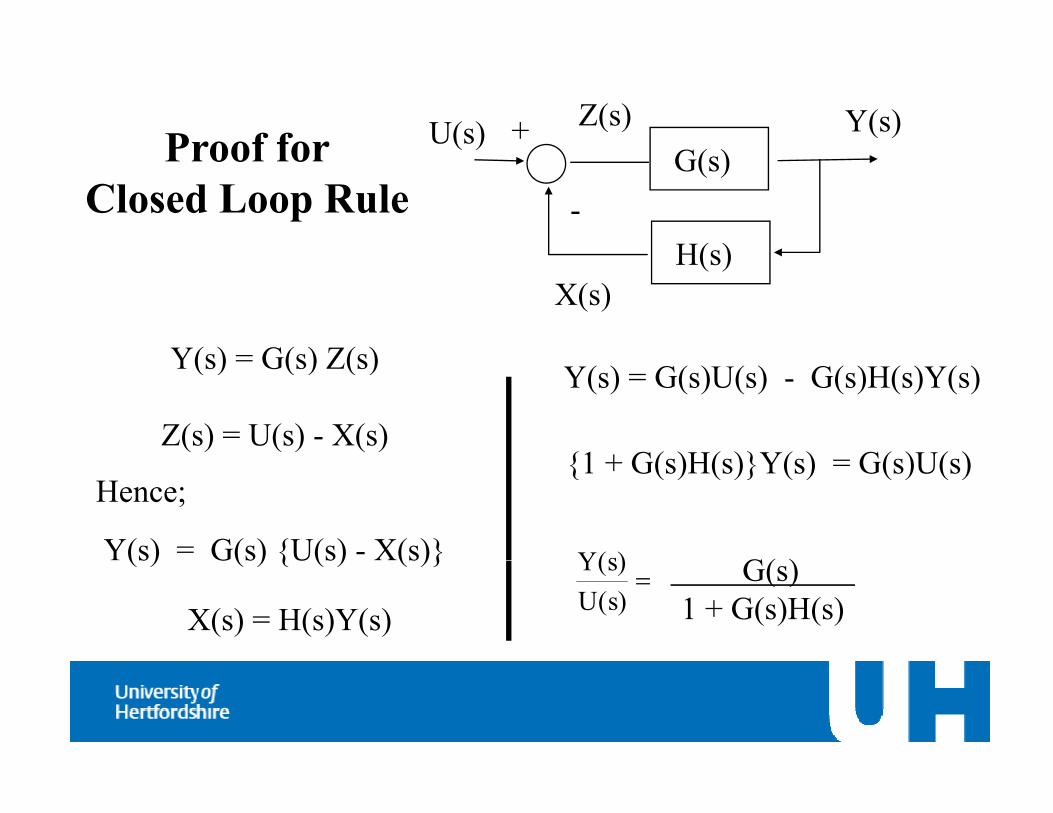
{1 + G(s)H(s)}Y(s) = G(s)U(s)Hence;
(s) G(s) {U(s) (s)}
X(s) = H(s)Y(s)
G( )+U(s) Y(s)Z(s)
Proof for G(s)-
H(s)
Proof forClosed Loop Rule
H(s)X(s)
Y(s) = G(s) Z(s)Y(s) = G(s) Z(s)
Z(s) = U(s) - X(s)
Y(s) = G(s)U(s) - G(s)H(s)Y(s)
{1 + G( )H( )}Y( ) G( )U( )
Y(s) = G(s) {U(s) - X(s)}
{1 + G(s)H(s)}Y(s) = G(s)U(s)Hence;
G( )Y s( )(s) G(s) {U(s) (s)}
X(s) = H(s)Y(s)G(s)
1 + G(s)H(s)Y sU s
( )( )
=
G( )+U(s) Y(s)Z(s)
Proof for G(s)-
H(s)
Proof forClosed Loop Rule
H(s)X(s)
Y(s) = G(s) Z(s)Y(s) = G(s) Z(s)
Z(s) = U(s) - X(s)
Y(s) = G(s)U(s) - G(s)H(s)Y(s)
{1 + G( )H( )}Y( ) G( )U( )
Y(s) = G(s) {U(s) - X(s)}
{1 + G(s)H(s)}Y(s) = G(s)U(s)Hence;
G( )(s) G(s) {U(s) (s)}
X(s) = H(s)Y(s)G(s)
1 + G(s)H(s)

Flow rate Controlqd
Gear box MotorC llController
Tank
qi
Flow rate sensorTapTank qo
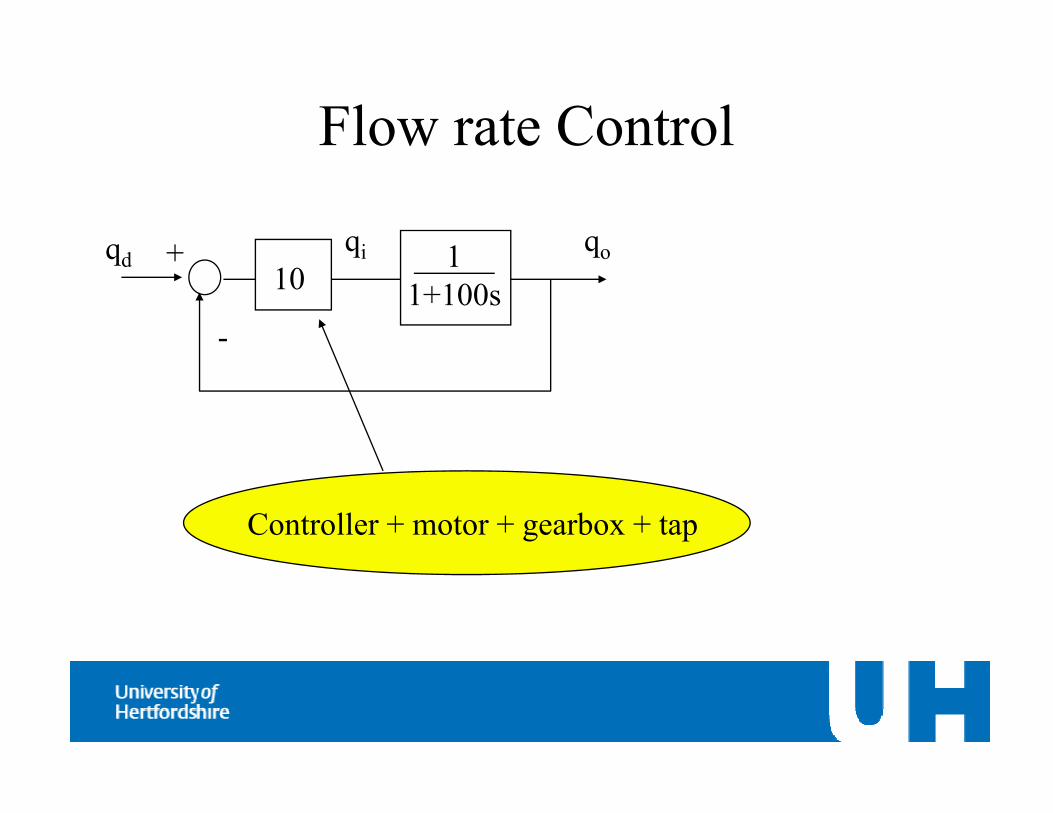
Flow rate Control
+ 1qi qoqd
-
+10
11+100s
qi qoqd
Controller + motor + gearbox + tap

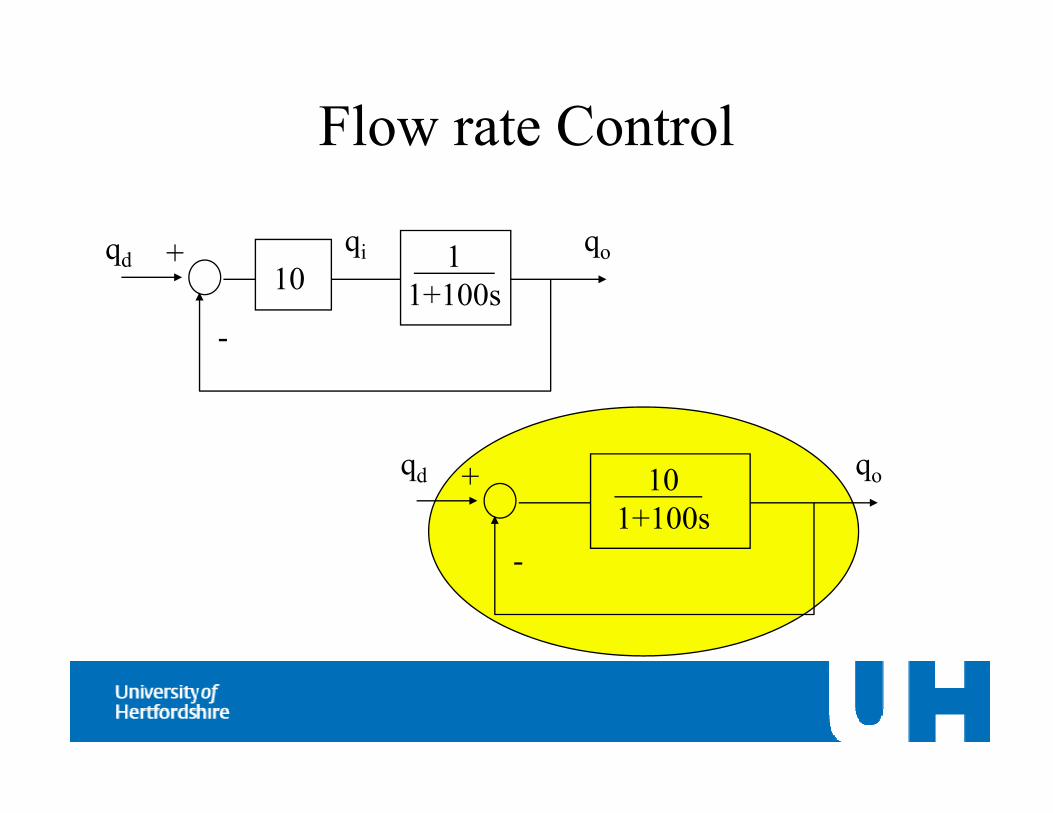
Flow rate Control
qi+ 1 qoqdqi
-
+10 1
1+100s
qoqd
+?
qd qo
-

Flow rate Control
+ 1qi qoqd
-
+10
11+100s
qi qoqd
+ 101+100s
qd qo
-
Flow rate Control
+ 1qi qoqd
-
+10
11+100s
qi qoqd
+ 101+100s
qd qo
-
Closed Loop
G(s)+
-H(s)
G(s) 1 + G(s)H(s)
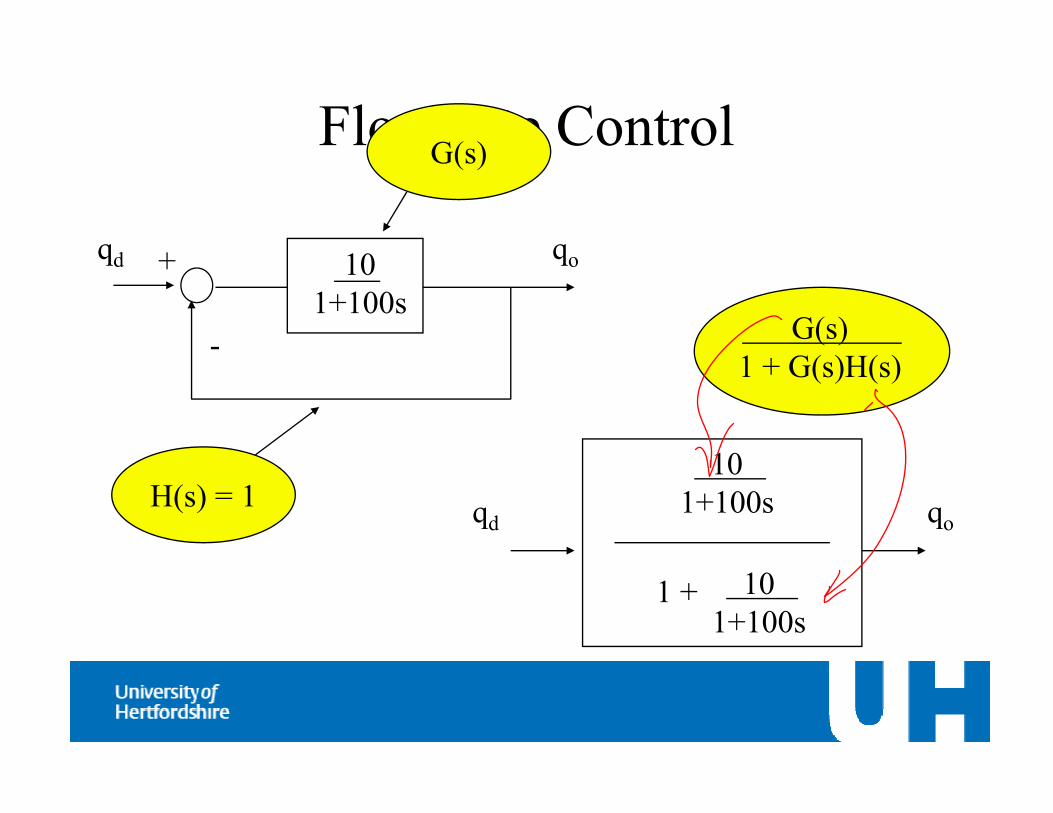
Flow rate ControlG(s)
+qd q
G(s)
-
+ 101+100s
qd qo
G(s)1 G( ) ( )
10
1 + G(s)H(s)
101+100sqd qo
H(s) = 1
1 + 101+100s
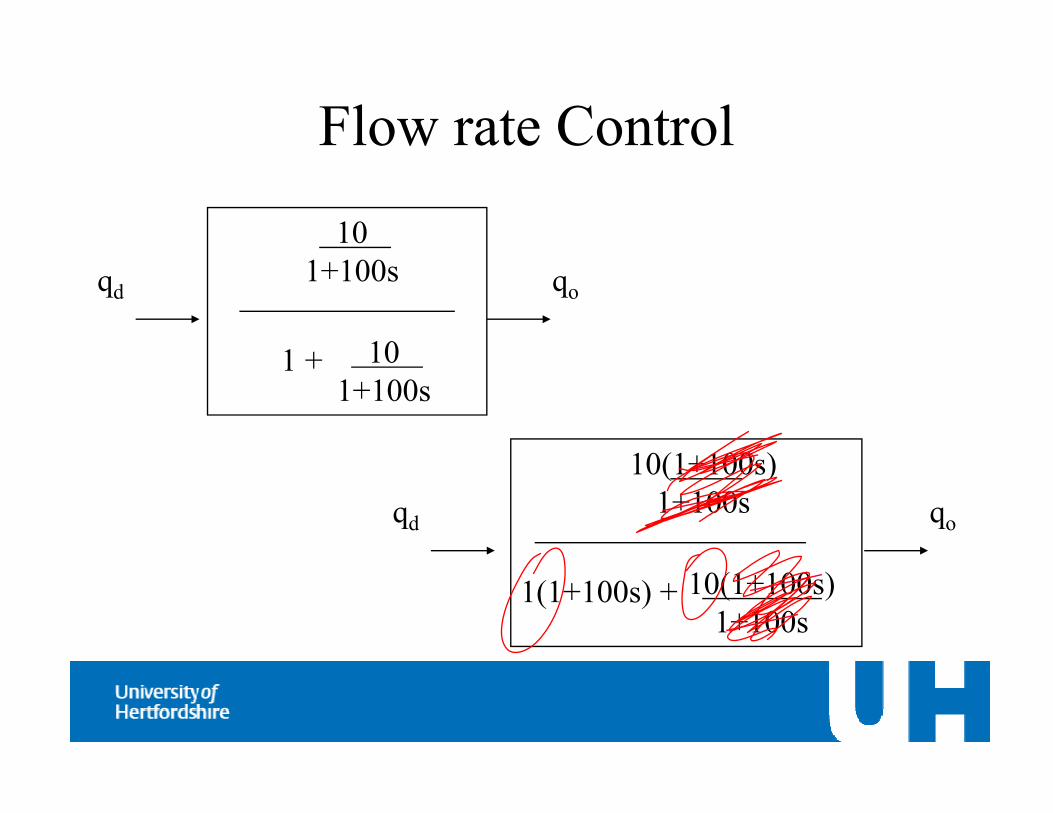
Flow rate Control
101+100s
1 + 10
qd qo
1 + 101+100s
10(1+100 )10(1+100s)1+100sqd qo
1(1+100s) + 10(1+100s)1+100s
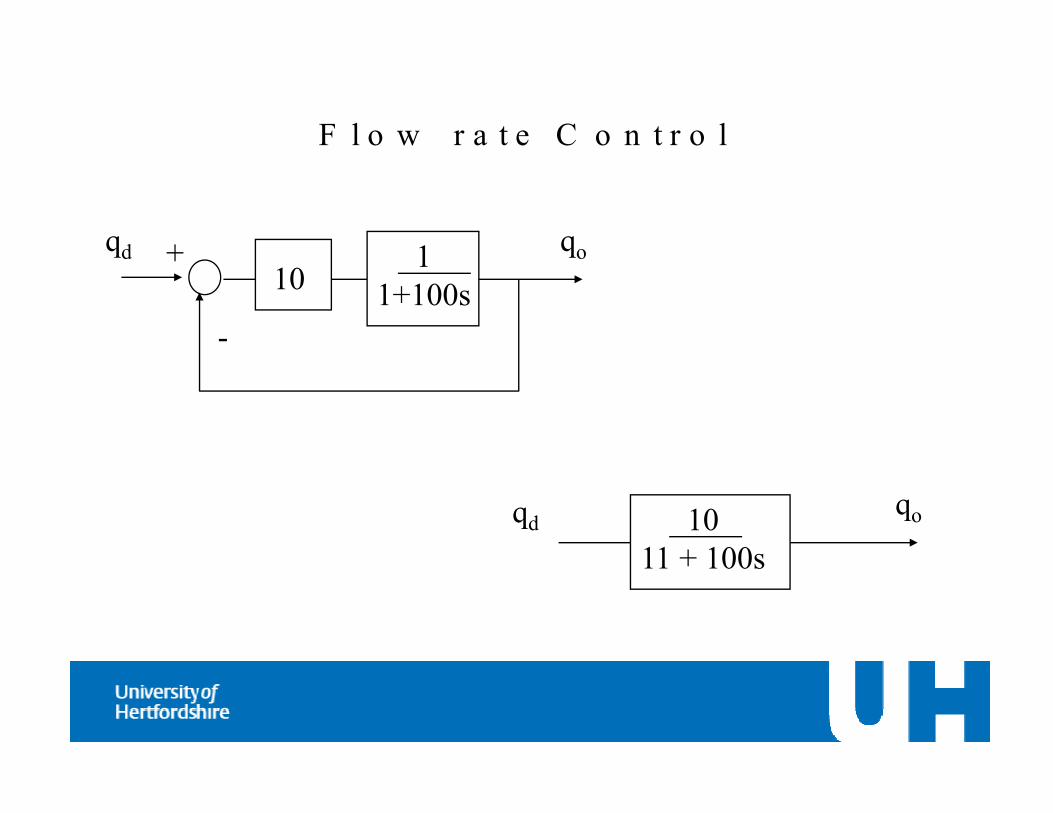
F l o w r a t e C o n t r o l
+ 1qd qo
-
+10
11+100s
qd qo
1011 + 100s
qdqo
11 + 100s

Moving a block round a summerMoving a block round a summer++
G(s)-
G(s)- =
G(s)
G(s)+
= G(s)+
- -1/G(s)
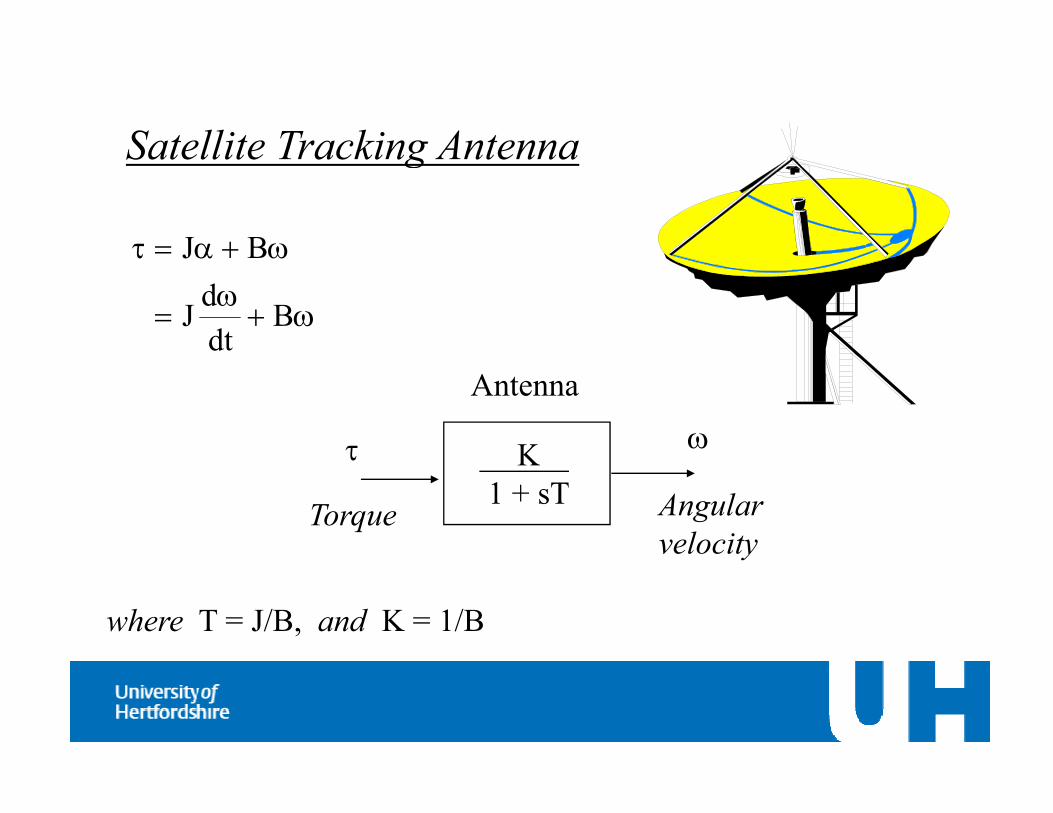
Satellite Tracking AntennaSatellite Tracking Antenna
τ α ω= +J Bτ α ωω
ω
= +
= +
J B
J ddt
B
Antenna
Kτ ωK1 + sT
τ
Torque Angularvelocity
where T = J/B, and K = 1/B
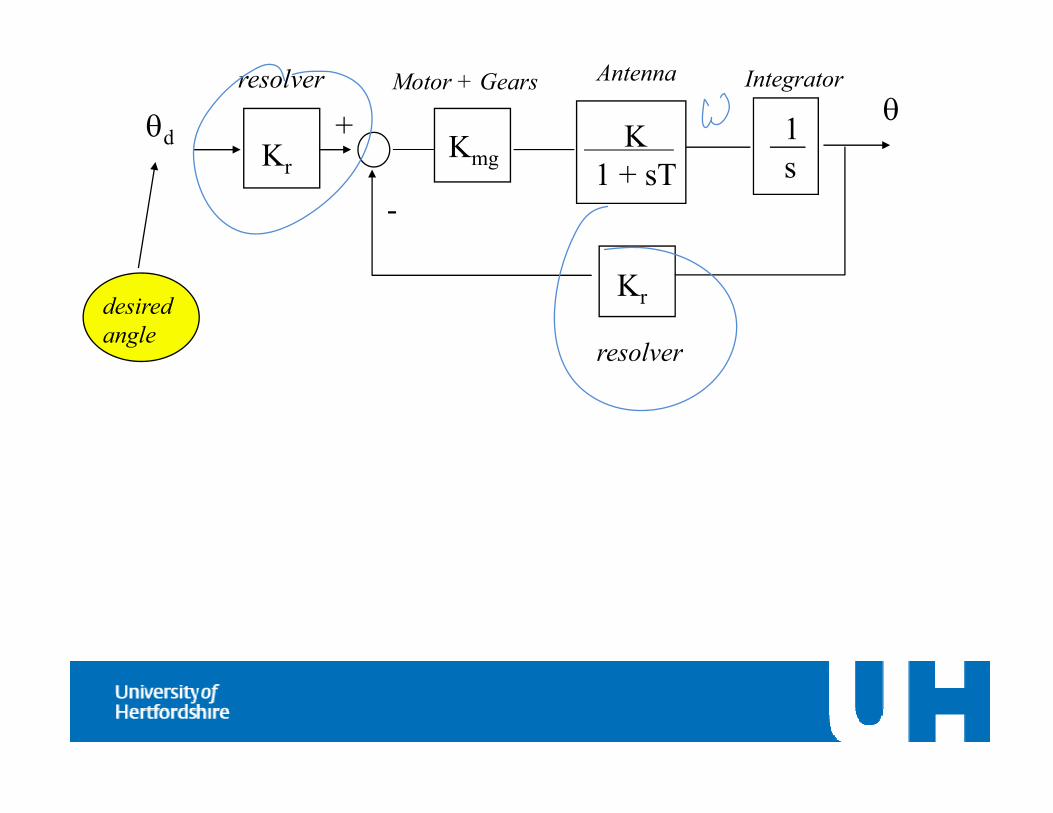
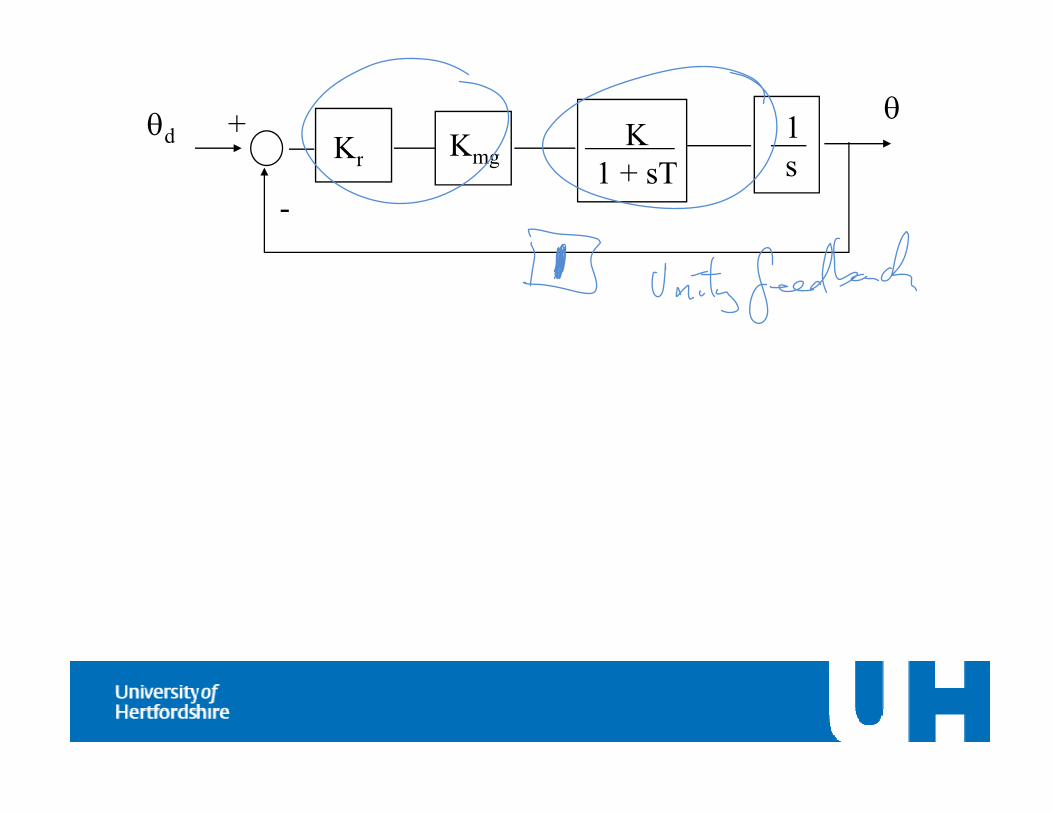
K 1KK+ θθd
Motor + Gears Antenna Integratorresolver
1 + sT sKmgKr
-
Kr
resolver
desiredangle
resolver

K 1KK+ θθd
Motor + Gears Antenna Integratorresolver
1 + sT sKmgKr
-
Kr
resolverresolver

K 1KK+ θθd
Motor + Gears Antenna Integratorresolver
1 + sT sKmgKr
-
Kr
resolver
K 1K+ θθd K
resolver
1 + sT sKmg
-
1
Kr
KrKr
1
K 1K+ θθd K
1 + sT sKmg
-
Kr

K 1K+ θθd K
1 + sT sKmg
-
Kr
K K K θθd + Kr Kmg K
(1 + sT)s
d +
-

K K K θθd + Kr Kmg K
(1 + sT)s
+
-
θθ Kr Kmg K
(1 + sT)s + Kr Kmg K
θθd
K K K θθd Kr Kmg K
Ts2 + s + Kr Kmg K

Summary of Lecture 5Summary of Lecture 5• Block manipulation involves reducing a
d b hsystem made up from many subsystems each with their own transfer function down to a single transfer function for the whole systemsingle transfer function for the whole system.
• Use the rules on the formula sheet working from the middle outwardsfrom the middle outwards.
• The open loop transfer function is what you get if there were a switch in the feedbackget if there were a switch in the feedback path that is OPEN.

















