52
| Date post: | 01-Jan-2016 |
| Category: |
Documents |
| Upload: | philomena-lambert |
| View: | 226 times |
| Download: | 0 times |
Test of Embedded Systems

IL2206 Embedded Systems 3
Program design and analysis
Verification costs are a significant part of the overall design costs
For large design the share of the verification costs can be up to 50% of the total design costs
Simulation and Test are the predominating verification method in industry
… but there is a large interest from industry to incorporate formal methods into the verification flow
April 20, 2023

IL2206 Embedded Systems 4
Goals
Make sure software works as intended. We will concentrate on functional testing---
performance testing is harder. What tests are required to adequately test the
program? What is “adequate”?
It is almost never practically possible to test the full software, since a program is so complex © 2000 Wolf (Morgan Kaufman)
April 20, 2023

IL2206 Embedded Systems 5
Test Environment
Provide the program with inputs Execute the program Compare the outputs to expected results
Test Environment
System under Test
Inpu
ts
Out
puts
April 20, 2023

IL2206 Embedded Systems 6
Types of software testing
Black-box: tests are generated without knowledge of program internals.
Clear-box (white-box): tests are generated from the program structure.
© 2000 Wolf (Morgan Kaufman)
April 20, 2023
IL2206 Embedded Systems 7
Clear-box testing
Generate tests based on the structure of the program. Is a given block of code executed when we think
it should be executed? Does a variable receive the value we think it
should get?
© 2000 Wolf (Morgan Kaufman)
April 20, 2023
IL2206 Embedded Systems 8
Controllability and observability
Controllability: must be able to cause a particular internal condition to occur.
Observability: must be able to see the effects of a state from the outside.
© 2000 Wolf (Morgan Kaufman)
April 20, 2023

IL2206 Embedded Systems 9
Example: FIR filter
Code:for (firout = 0.0, j =0; j < N; j++)
firout += buff[j] * c[j];
if (firout > 100.0) firout = 100.0;
if (firout < -100.0) firout = -100.0;
Controllability: to test range checks for firout, must first load circular buffer.
Observability: how do we observe values of buff, firout? © 2000 Wolf (Morgan Kaufman)
April 20, 2023

Example: FIR-Filter
How do we observe correct operation?1. Set the system into a
defined state Input k-1 0’s Input 1
2. Observe output Expected Output: ck
3. Input k-1 0’s Expected Outputs: ck-1,
ck-2, …, c1
IL2206 Embedded Systems 10
D
*
+
D
*
D
+
*
D
+
*
”Tap”
xk xk-1 x2 x1
ck ck-1 c2 c1
yk
yk= ckxk + ck-1xk-1 + ... + c1x1
April 20, 2023

IL2206 Embedded Systems 11
Path-based testing
Clear-box testing generally tests selected program paths: control program to exercise a path; observe program to determine if path was
properly executed. May look at whether location on path was
reached (control), whether variable on path was set (data).
© 2000 Wolf (Morgan Kaufman)
April 20, 2023

IL2206 Embedded Systems 12
Example: choosing paths
Two possible criteria for selecting a set of paths: Execute every statement at least once. Execute every direction of a branch at least once.
Equivalent for structured programs, but not for programs with gotos.
© 2000 Wolf (Morgan Kaufman)
April 20, 2023

IL2206 Embedded Systems 13
Path example
Covers allstatements
+/+ Covers allbranches
© 2000 Wolf (Morgan Kaufman)
April 20, 2023

IL2206 Embedded Systems 14
Branch testing strategy
Exercise the elements of a conditional, not just one true and one false case.
Devise a test for every simple condition in a Boolean expression.
© 2000 Wolf (Morgan Kaufman)
April 20, 2023

IL2206 Embedded Systems 15
Example: branch testing
Meant to write:if (a || (b >= c)) { printf(“OK\n”); }
Actually wrote:if (a && (b >= c)) { printf(“OK\n”); }
Branch testing strategy: One test is a=F, (b >= c) = T: a=0, b=3, c=2. Produces different answers.
© 2000 Wolf (Morgan Kaufman)
April 20, 2023
IL2206 Embedded Systems 16
Another branch testing example
Meant to write:if ((x == good_pointer) && (x->field1 == 3))...
Actually wrote:if ((x = good_pointer) && (x->field1 == 3))...
Branch testing strategy: If we use only field1 value to exercise branch, we
may miss pointer problem.
© 2000 Wolf (Morgan Kaufman)
April 20, 2023

Tools for Code Coverage
Tools exist to analyze to what extent the code is executed
‘gcov’, which is part of ‘gcc’ is a tool to measure code coverage
Tool coverage tools can significantly improve the tests of Embedded Software, since it becomes obvious, which parts of the code are never executed during a test!
IL2206 Embedded Systems 17April 20, 2023

Code Coverage Tool gcov
Example Code
int main (void) {
int i;
for (i = 1; i < 10; i++)
{
if (i % 3 == 0)
printf ("%d can be divided by 3\n", i);
if (i % 11 == 0)
printf ("%d can be divided by 11\n", i);
}
return 0;
}
IL2206 Embedded Systems 18April 20, 2023

Running gcov
> gcc -fprofile-arcs -ftest-coverage gcov.c
> a.out
3 can be divided by 3
6 can be divided by 3
9 can be divided by 3
> gcov gcov.c
File 'gcov.c'
Lines executed:85.71% of 7
gcov.c:creating 'gcov.c.gcov'
IL2206 Embedded Systems 19April 20, 2023

gcov Output
-: 1:#include <stdio.h>
-: 2:
1: 3:int main (void) {
-: 4: int i;
10: 5: for (i = 1; i < 10; i++)
-: 6: {
9: 7: if (i % 3 == 0)
3: 8: printf ("%d can be divided by 3\n", i);
9: 9: if (i % 11 == 0)
#####: 10: printf ("%d can be divided by 11\n", i);
-: 11: }
1: 12: return 0;
-: 13:}
IL2206 Embedded Systems 20April 20, 2023

IL2206 Embedded Systems 21
Data flow testing
Def-use analysis: match variable definitions (assignments) and uses.
Example:
x = 5;
…
if (x > 0) ... Does assignment get to the use?
def
use
© 2000 Wolf (Morgan Kaufman)
April 20, 2023
IL2206 Embedded Systems 22
Black-box testing
Black-box tests are made from the specifications, not the code.
Black-box testing complements clear-box. May test unusual cases better.
© 2000 Wolf (Morgan Kaufman)
April 20, 2023

IL2206 Embedded Systems 23
Types of black-box tests
Specified inputs/outputs: select inputs from spec, determine required
outputs. Random:
generate random tests, determine appropriate output.
Regression: tests used in previous versions of system.
© 2000 Wolf (Morgan Kaufman)
April 20, 2023

IL2206 Embedded Systems 24
Evaluating tests
It is very important to evaluate your tests Keep track of bugs found Introduce a new test procedure for every found
bug Error injection: add bugs to copy of code, run
tests on modified code. Error injection can be used to measure fault
coverage
April 20, 2023

IL2206 Embedded Systems 25
Formal Verification
An alternative to test is formal verification Example Model Checking
A formal model of a system is created State machine
Properties that systems shall specify are specified in a formal way It should never happen that both traffic lights signal “Green”
Tool checks that all properties are fulfilled for all input and state combinations, otherwise counter example is generated
Only small systems can be verified (state explosion problem)
April 20, 2023

IL2206 Embedded Systems 26
Summary
Test and verification are very important for in embedded system design
Good tests have to be planned Difficult to cover all test cases Tests should be evaluated in order to allow
possible improvements Formal verification is a very promising
alternative for critical parts!
April 20, 2023

Fault Tolerance
Ref: E. McCluskey and S. Mitra, “Fault Tolerance”

IL2206 Embedded Systems 28
Fault Tolerance
Fault Tolerance is the ability of a system to continue correct operation after the occurrence of hardware or software failures or operator errors
Fault tolerance includes detection of system malfunction identification of faulty units recovery of system from failure
April 20, 2023

IL2206 Embedded Systems 29
Reliability Requirements
Reliability requirements vary for different kinds of embedded systems low-cost systems shall operate for a reasonable
time and may then fail (calculator, cell phone) repair is often uneconomical
safety-critical systems must have a very high reliability (nuclear power plants, automotive control) probability of error in aircraft computer system is less
than 10-9 per hour
April 20, 2023

IL2206 Embedded Systems 30
Failures
Any deviation from expected behaviour is a failure
Failures that cause system to stop or crash are much easier to detect than failures that degrade system performance occasionally
April 20, 2023

IL2206 Embedded Systems 31
Failures
A permanent failure is a failure that is always present incorrect hardware or software functions
A temporary failure is a failure that is not always present during operation transient failures (externally induced signal
perturbation, power-supply disturbances) intermittent failure (weak system component
produces incorrect outputs under certain operating conditions)
April 20, 2023

IL2206 Embedded Systems 32
Source for Failures
Incorrect or incomplete specification interfaces not clearly defined
Incorrect design (bugs) memory allocation management of data structures communication between processes
Non-careful verification process not all possible scenarios are tested or verified
April 20, 2023

IL2206 Embedded Systems 33
Error
An error is the occurrence when incorrect data or control signals are produced
If a failure occurs in a system it may cause an error not cause an error, if the failure does not affect
system operation
April 20, 2023

IL2206 Embedded Systems 34
Fault Model
A fault model represents the effect of a failure by means of the change produced in the system signals
The usefulness of a fault model can be judged by Effectiveness in failure detection Accuracy of the representation of effects of
failures Tractability of design tools that use fault model
April 20, 2023

IL2206 Embedded Systems 35
ExampleSingle Stuck-at Fault Model
Single Stuck-at fault model is used to test hardware circuits
Very efficient in detection of defect chips Used to determine a minimal set of test
vectors Properties
Assumes single fault One signal in the system is stuck at value 0 or 1
Failure is observed at output
April 20, 2023

IL2206 Embedded Systems 36
ExampleSingle Stuck-at Fault Model
Which test vectors are needed to test an AND-gate according to the single stuck-at-model?
AND
A
B
Y
April 20, 2023

IL2206 Embedded Systems 37
ExampleSingle Stuck-at Fault Model
Six faults are possible s-a-0(A), s-a-1(A), s-a-0(B), s-a-1(B), s-a-0(Y), s-a-1(Y)
AND
A
B
Y
1
s-a-1(A): stuck-at-1 fault in A
April 20, 2023

IL2206 Embedded Systems 38
Three test vectors (ABY = {010, 100, 111}) needed.
Reduction with 25%!
ExampleSingle Stuck-at Fault Model
Faults can only be observed at output!
AND
A
B
Y
A A B B Y Y
A B Y s-a-0 s-a-1 s-a-0 s-a-1 s-a-0 s-a-1
0 0 0 x
0 1 0 x x
1 0 0 x x
1 1 1 x x x
x = Fault can be observed at output!
April 20, 2023

IL2206 Embedded Systems 39
Fault Models
Single stuck-at-model has been very successful in hardware design
More complicated fault models exist Difficult to develop fault models for software
no consensus about the effectiveness of software fault models
April 20, 2023

IL2206 Embedded Systems 40
Reliability Metrics
There are many different metrics for reliability depending on the character of the system Reliability of a system at time t is the probability
that system will produce correct output up to time t
Availability of a system at time t is the probability that the system is operational at time t
April 20, 2023

IL2206 Embedded Systems 41
Reliability Metrics
Safety of a system at time t is the probability that the system either will be operating correctly or will fail in a “safe” manner
Performability of a system at time t is the probability that the system is operating correctly or at a reduced throughput greater or equal a given value
Maintainability M(t) is the probability that it takes t units of time to restore a failed system to normal operation
April 20, 2023

IL2206 Embedded Systems 42
Metrics for Testability
There exist even measures for testability, which is the ease with which the system can be tested difficult to quantify important factors
test pattern generation cost test application cost observability of state information controllability – production of an internal signal
April 20, 2023

IL2206 Embedded Systems 43
Measurement of reliability
Test of a large number of components N At time t
G(t) is number of correctly operating components F(t) is number of components that have failed
Reliability R(t) = G(t)/N
April 20, 2023

IL2206 Embedded Systems 44
Measurement of reliability
There are important other metrics that are related to the presented reliability metrics Mean Time To Failure (MTTF) Mean Time To Repair (MTTR)
Together these metrics can be used to calculate other metrics Average Availability: MTTF / (MTTF + MTTR) Mean Time Between Failures (MTBF)
MTBF = MTTF + MTTR
April 20, 2023

IL2206 Embedded Systems 45
Bathtub Curve
For hardware systems the bathtub curve illustrates the reliability of typical systems
April 20, 2023

IL2206 Embedded Systems 46
Fault Avoidance
Reliability can be improved during the design process robust design techniques design validation techniques reliability verification techniques thorough production techniques
Fault avoidance techniques are very costly
April 20, 2023

IL2206 Embedded Systems 47
System Failure Response
System can respond in different ways to a failure Error on output – Acceptable in non-critical applications
digital watch, games Errors masked – Outputs correct even when fault occurs
flight control Fault secure – Output correct or error indication if output
incorrect banking, telephony, networking
Fail safe – Output correct or at “safe value” “red” light for traffic control
April 20, 2023

IL2206 Embedded Systems 48
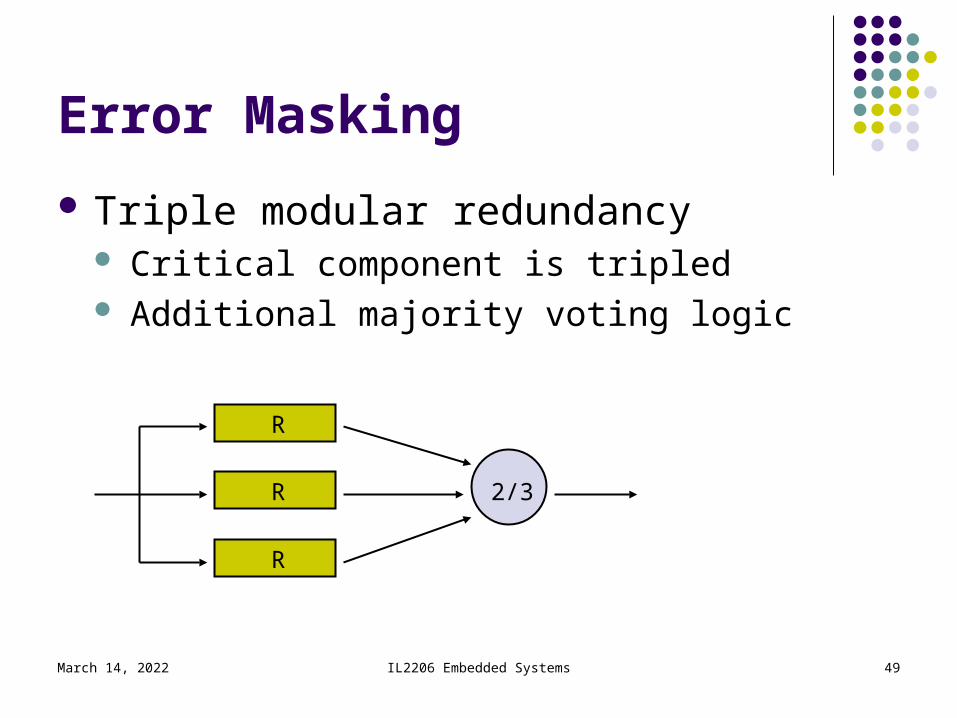
Error Masking
Triple modular redundancy Critical component is tripled Additional majority voting logic
R
R
R
2/3
April 20, 2023
IL2206 Embedded Systems 49
Error Masking
Triple modular redundancy Critical component is tripled Additional majority voting logic
R
R
R
2/3
April 20, 2023
IL2206 Embedded Systems 50
Error MaskingSoftware Techniques
N-Version Programming Several versions of program are written
independently Voting is used
Recovery Blocks Several versions of program are written
independently Only one program is run and monitored If error is detected an alternate program is run
April 20, 2023

IL2206 Embedded Systems 51
Repair Techniques
When there is a failure in a system the failure must be detected and isolated
Built-In Self-Test: Additional functionality tests if system operates correctly and identifies faulty parts
system must respond to the error system must be repaired
self-repair techniques (space missions) exact diagnosis for fault and report to maintenance
personal
April 20, 2023

IL2206 Embedded Systems 52
Summary
Reliability comes with a cost Redundancy is required (extra components
that are not needed for the pure functionality) There is a trade-off between reliability and
design costs Often a very low probability for a fault-free
system is good enough!
April 20, 2023


















