23
Lecture 8 ENGR-1100 Introduction to Engineering Analysis
| Date post: | 21-Dec-2015 |
| Category: |
Documents |
| View: | 225 times |
| Download: | 2 times |

Lecture 8
ENGR-1100 Introduction to Engineering Analysis
Lecture outline
• Moment of a force
• Principle of moments and Varignon’s law
Non Concurrent Forces• For concurrent forces R= 0 was sufficient for equilibrium.• For non concurrent forces the particle idealization is no
longer valid.• For this case the condition R= 0, while still necessary for
equilibrium, is not sufficient.• A second restriction is related to tendency of a force to
produce rotation (angular acceleration) of a body.• This gives rise to the concept of moment of a force:
F
F

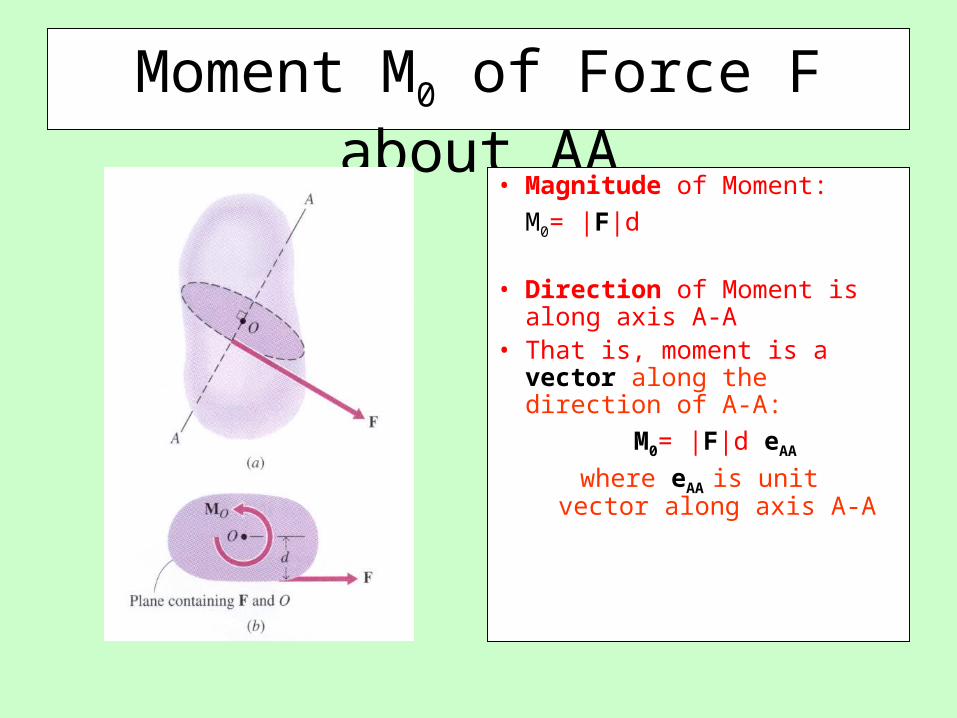
Moment M0 of Force F about AA
• Magnitude of Moment:
M0= |F|d
• Direction of Moment is along axis A-A
• That is, moment is a vector along the direction of A-A:
M0= |F|d eAA
where eAA is unit vector along axis A-A
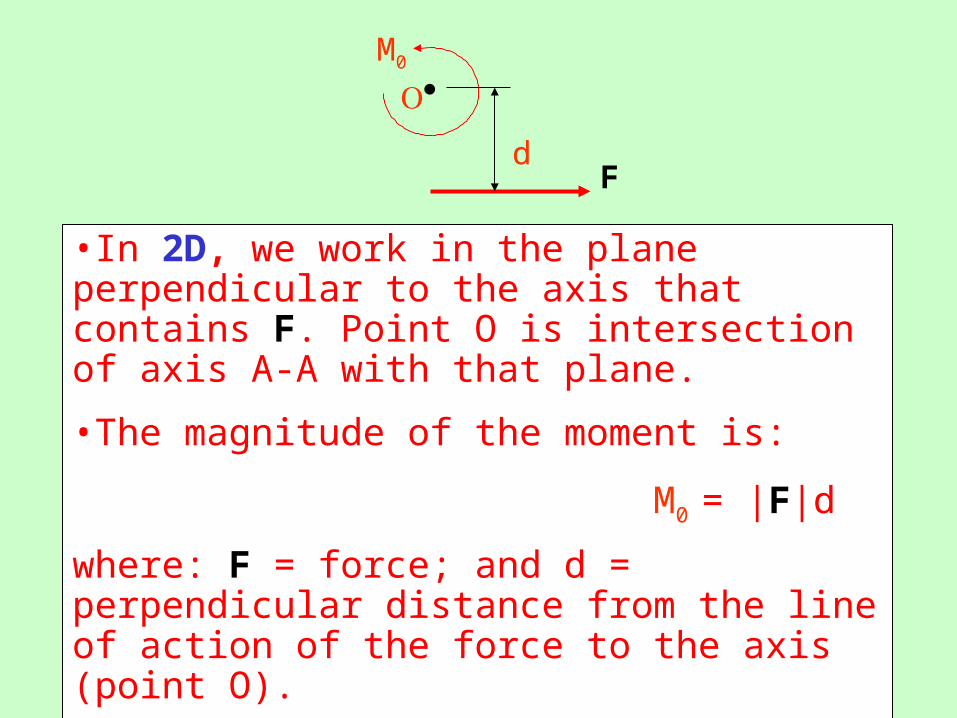
Fd
M0
•In 2D, we work in the plane perpendicular to the axis that contains F. Point O is intersection of axis A-A with that plane.
•The magnitude of the moment is:
M0 = |F|d
where: F = force; and d = perpendicular distance from the line of action of the force to the axis (point O).
•Units of Moment M0 : lb•ft or lb•in in U.S. Customary system; and N•m or kN•m in SI units.

Fd
M0
•In 2D, we don’t need the complication of treating M0 as a vector. We treat M0 as a scalar (it is understood that it is a vector perpendicular to plane).
•The magnitude of moment M0 in the plane is:
M0=|F|d
• The sign of M0 is:
(+) when counterclockwise (figure)
(-) when clockwise (opposite to figure)
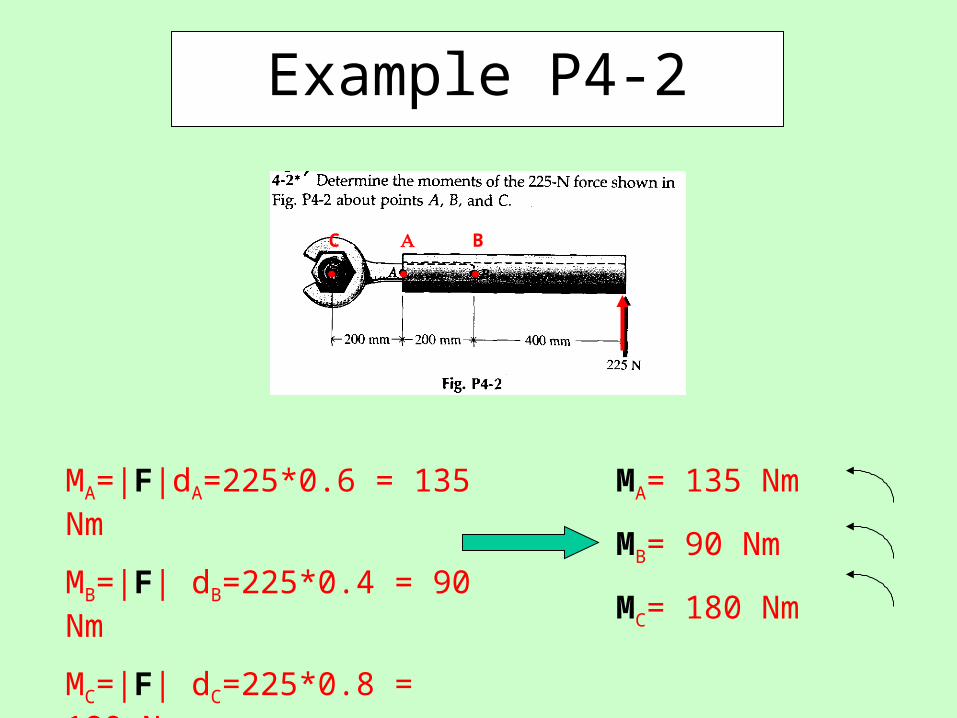
Example P4-2
MA=|F|dA=225*0.6 = 135 Nm
MB=|F| dB=225*0.4 = 90 Nm
MC=|F| dC=225*0.8 = 180 Nm
MA= 135 Nm
MB= 90 Nm
MC= 180 Nm
C
B
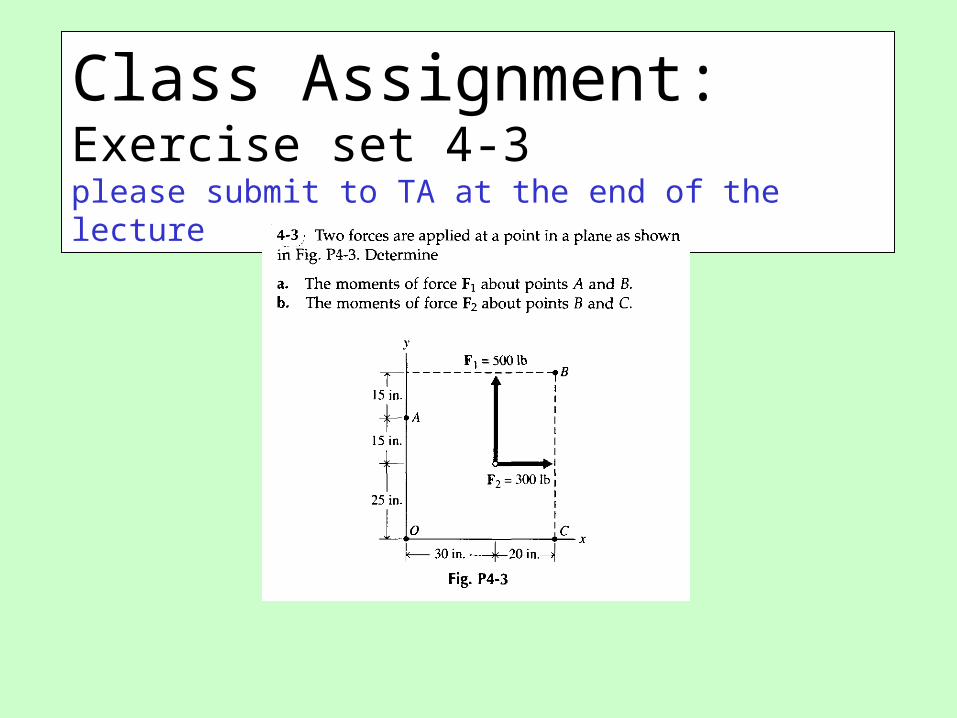
Class Assignment: Exercise set 4-3please submit to TA at the end of the lecture
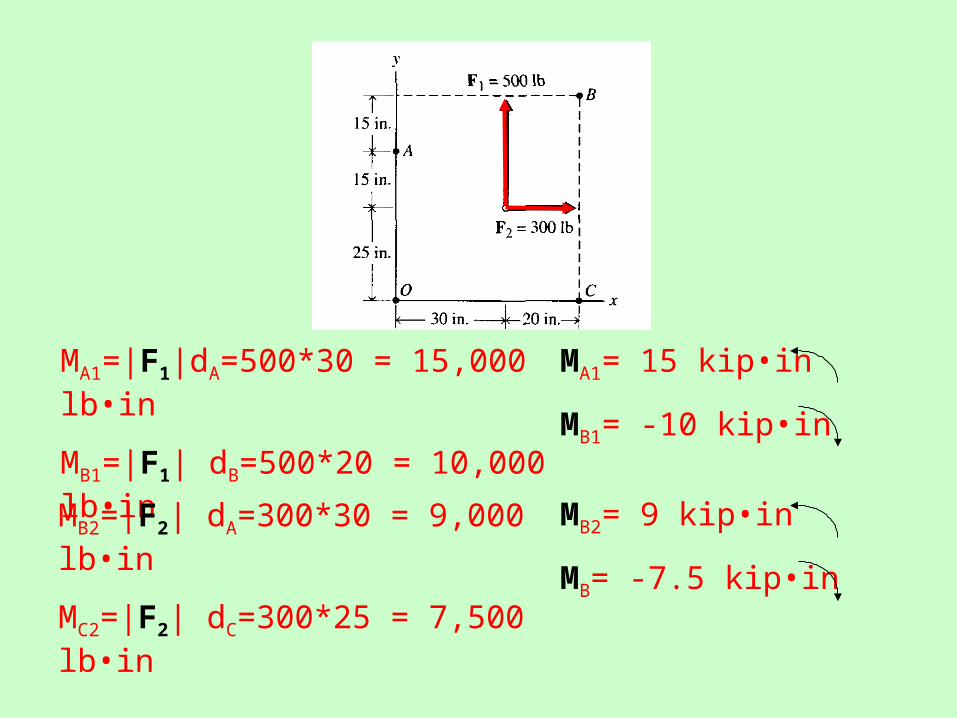
MA1=|F1|dA=500*30 = 15,000 lb•in
MB1=|F1| dB=500*20 = 10,000 lb•in
MA1= 15 kip•in
MB1= -10 kip•in
MB2=|F2| dA=300*30 = 9,000 lb•in
MC2=|F2| dC=300*25 = 7,500 lb•in
MB2= 9 kip•in
MB= -7.5 kip•in

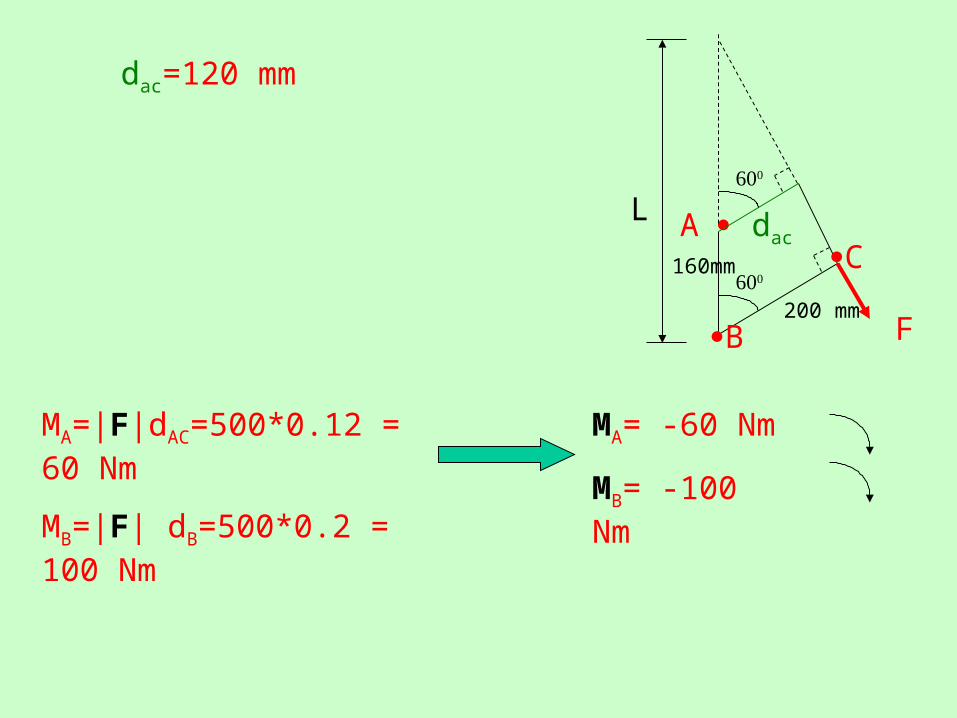
Example P4-10
A C
B
L
200 mm
160mm
dac
Cos (600) = 200/L
Cos (600) = dac/(L-160)
L = 200/ Cos (600)
L=160+dac/Cos (600)
dac=200-160 Cos (600)=120 mm
A C
B
L
200 mm
160mm
dac
dac=120 mm
MA=|F|dAC=500*0.12 = 60 Nm
MB=|F| dB=500*0.2 = 100 Nm
F
MA= -60 Nm
MB= -100 Nm
Principle of moments:
• The moment M0 of the resultant R of a system of forces with respect to any axis or point is equal to the vector sum of the moment of the individual forces of the system with respect to the same axis or point.
R= F1+ F2+…..+ Fn
M0= Rdr=F1d1+ F2d2+…..+ Fndn

Application of the principle: Varignon’s Theorem
A
y
B
x
R
•From Geometry:
4) R cos =
R Cos
A Cos
A cos
B Cos
+ B cos
MR=MA+ MB
From equations 1, 2, 3, and 4:
h
1) MR= R.d=R(h cos )
d
2) MA= A.a=A(h cos a
3) MB= B.b=B(h cos b
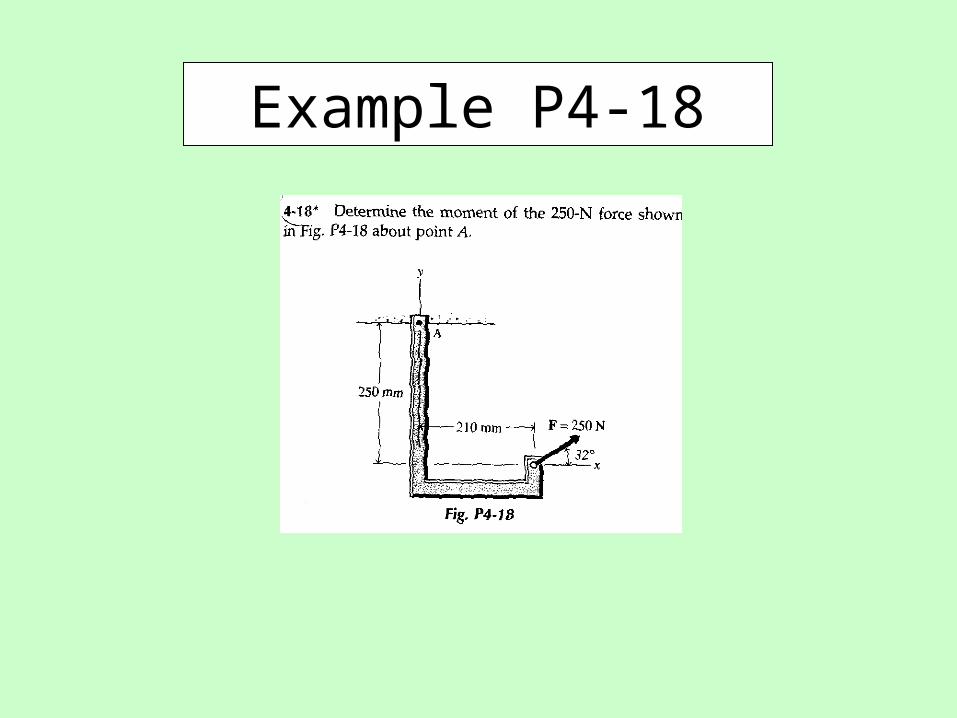
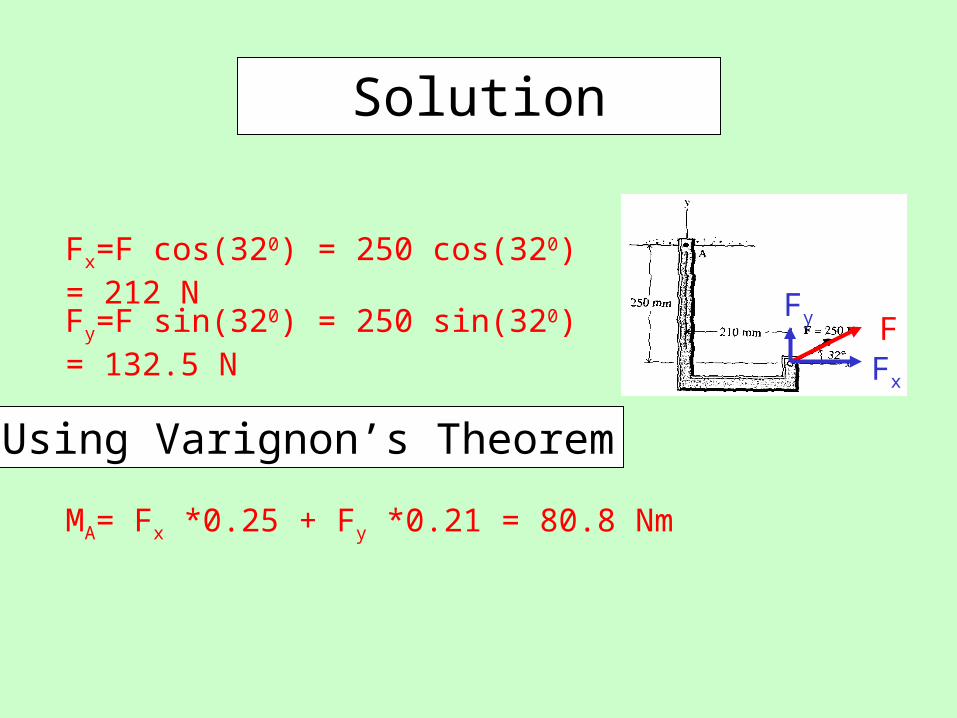
Example P4-18
FFx
Fy
Fx=F cos(320) = 250 cos(320) = 212 N
Fy=F sin(320) = 250 sin(320) = 132.5 N
Solution
Using Varignon’s Theorem
MA= Fx *0.25 + Fy *0.21 = 80.8 Nm

Class Assignment: Exercise set 4-7please submit to TA at the end of the lecture
Two forces are applied to a beam as shown in the figure. Determine the moments of forces F1 and F2 about point A.
F2 = 175 lb
F1 = 250 lb
60o
x
y
3 ft
AB
Answer:MA1 = 650 ft.lb
MA2 = -525 ft.lb

Class Assignment: Exercise set 4-11please submit to TA at the end of the lecture
Determine the moment of the 350 lb force shown in the figure about points A and B.
350 lb
40o
x
y
10 in
A
C Answer:MA=5.47 in.kip
MB=2.25 in.kip
B
12 in
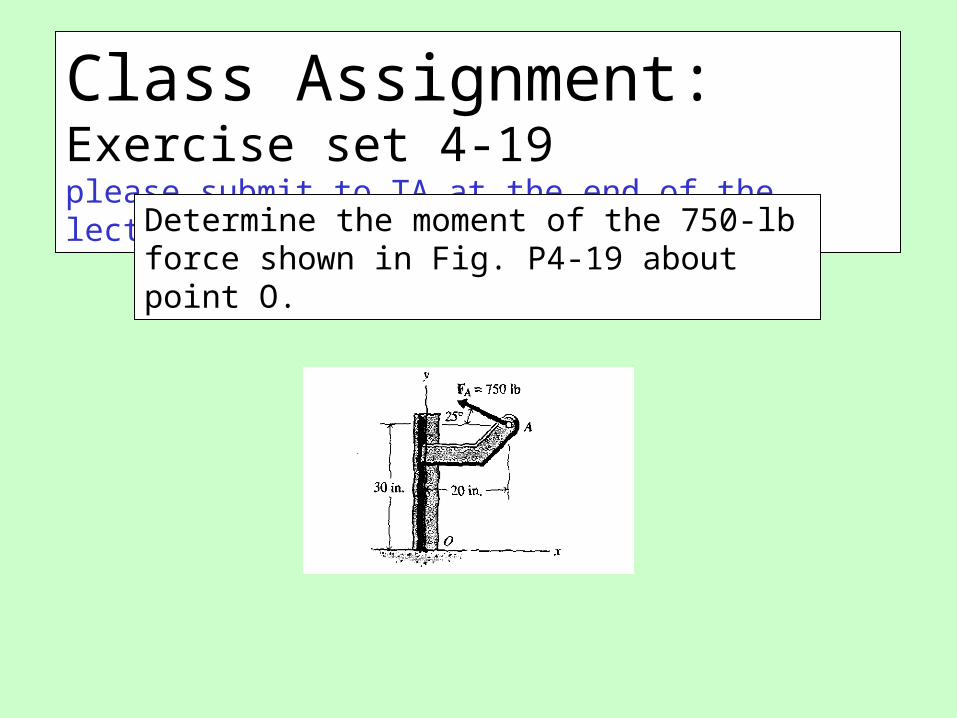
Class Assignment: Exercise set 4-19please submit to TA at the end of the lecture
Determine the moment of the 750-lb force shown in Fig. P4-19 about point O.

Vector Representation of a Moment
• It is often more convenient to use the vector approach to simplify moment calculation.
M0=r X F = | r || F |sin e
Where: r is the position vector from point O to a point A on the line if action of the force F.
e – unit vector perpendicular to plain containing r and F.
Fd
r

Finding the Position Vector
r= rAB = rA-rB = (xA i + yA j + zA k ) - (xB i + yB j + zB k )
(xA - xB ) i + (yA - yB ) j + (zA - zB ) k
rA= rB+ rAB
Since: x
y
z
F
xA
xB
yA
yB
zAzB
rAB
rB= xB i + yB j + zB k
The location of point BrB
rA= xA i + yA j + zA k
The location of point A
rA
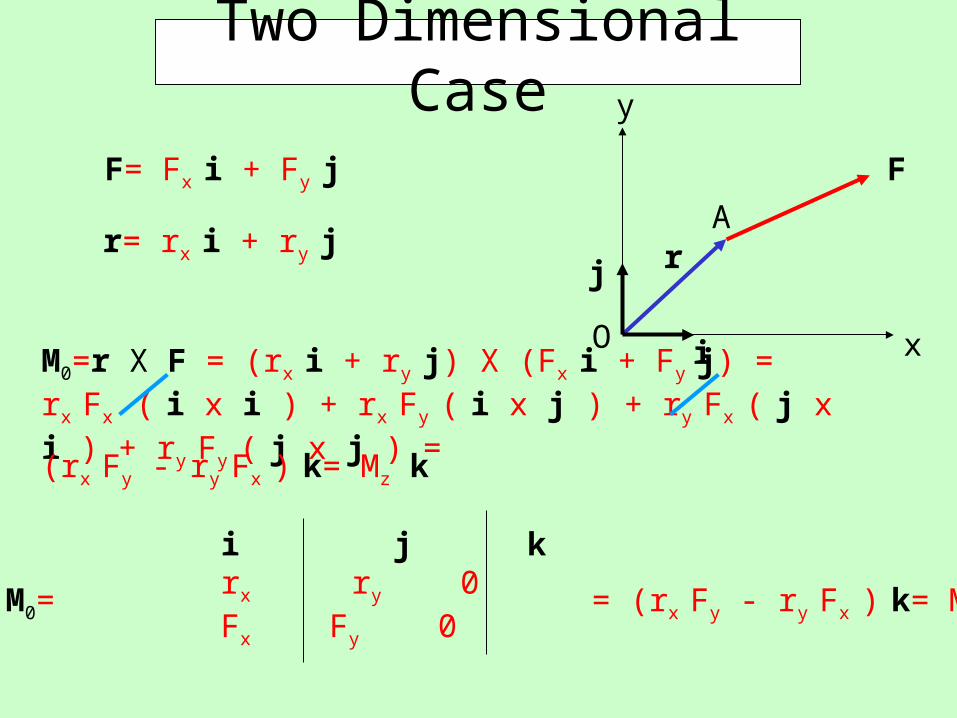
Two Dimensional Case
F= Fx i + Fy j
r= rx i + ry j
x
y
r
F
O
A
j
iM0=r X F = (rx i + ry j) X (Fx i + Fy j) = rx Fx ( i x i ) + rx Fy ( i x j ) + ry Fx ( j x i ) + ry Fy ( j x j ) =
(rx Fy - ry Fx ) k= Mz k
M0= = (rx Fy - ry Fx ) k= Mz k
i j k rx ry 0Fx Fy 0
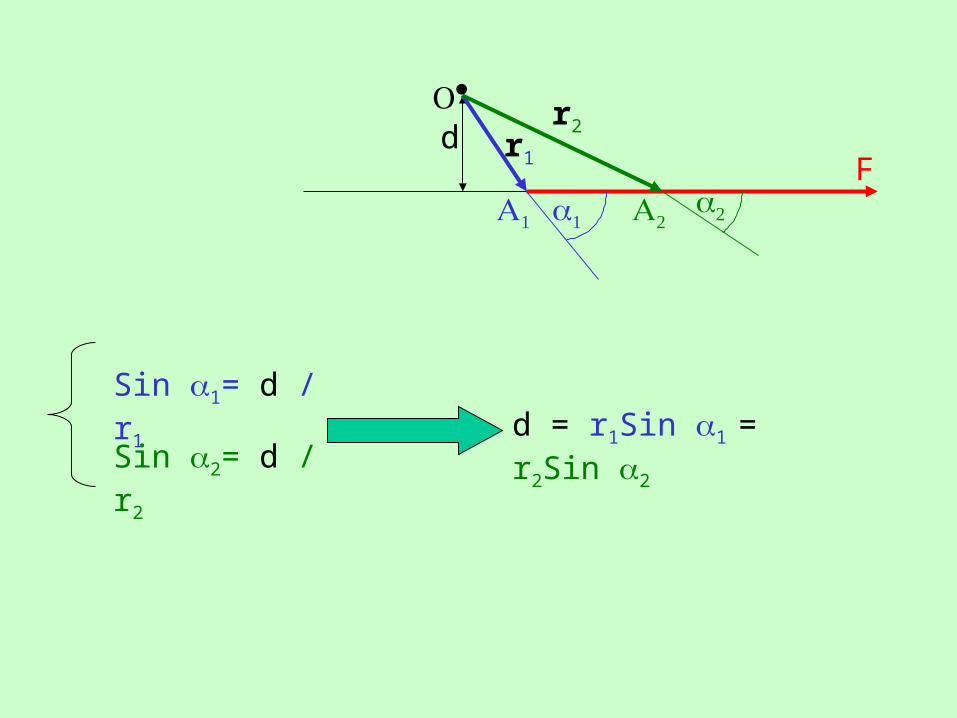
Fd
r1
Sin 1= d / r1
r2
Sin 2= d / r2
d = r1Sin 1 = r2Sin 2

















