Page 1
September 2015 I 1Property of Valeo. Duplication prohibited
September 2015
Property of Valeo. Duplication prohibited
Live Debugging of Stateflow Charts While Running on ECU
Amjad Elshenawy & Mohammad Raouf
Mathworks Automotive Conference 2015Stuttgart, Sep., 24th 2015
GEEDS - Group Electronics Expertise and Development Services
Page 2
September 2015 I 2Property of Valeo. Duplication prohibited
Table of contents
Testing & Debugging Techniques in MBD
Focus on « Simulink External Mode »
Valeo Solution in Details
Conclusion
1
2
4
3
3
12
17
25
Page 3
September 2015 I 3Property of Valeo. Duplication prohibited
Testing & Debugging Techniques in MBD
Focus on « Simulink External Mode »
Valeo Solution in Details
Conclusion
1
2
4
3
3
12
17
25
Page 4
September 2015 I 4Property of Valeo. Duplication prohibited
Testing in Model Based Design
Model-In-the-LoopTest
Controller Model
Plant Model or Stimulion PC
Software-In-the-LoopTest
C-Code on Host PC
Plant Model or Stimulion PC
Processor-In-the-LoopTest
C-Code on Target μController
Plant Model or Stimulion PC
Hardware-In-the-LoopTest
C-Code on ECU
Plant Modelon HIL Simulator
On VehicleTest
C-Code on ECU
What happens if a test case fails?
How to debug in X-In-the-Loop testing?
How to debug on Vehicle?
Page 5
September 2015 I 5Property of Valeo. Duplication prohibited
Debugging in Model-In-the-Loop (MIL) Testing
Signal Analysis
Scopes and Signal ViewersSignal Loggingetc …
Simulink Blocks Stateflow ChartsStateflow Chart Animation
Stateflow Breakpoints and Watch Data
Page 6
September 2015 I 6Property of Valeo. Duplication prohibited
Debugging in Software-In-the-Loop (SIL) & Processor-In-the-Loop (PIL) Testing
Signal Analysis
Scopes and Signal ViewersSignal Loggingetc …
Simulink Blocks Stateflow ChartsStateflow Chart Animation in “External Mode”
Chart local data can be viewed on signal viewers by designating them to be test points
Some Limitations Exist forinternal Signal Logging
Page 7
September 2015 I 7Property of Valeo. Duplication prohibited
Debugging in Hardware-In-the-Loop (HIL) & On Vehicle Testing
Design phase
Identify debugging variablesDeclare debugging variables as “Global Variables” (they will have Fixed Memory Address)
Validation phase
ECU
Generated Code from Model
xCP / CCP Driver
CAN Driver
Debug Monitor
TestTool
Data Measurement
xCP / CCP Driver
CAN Driver
Parameter Tuning
CAN Communication
Page 8
September 2015 I 8Property of Valeo. Duplication prohibited
Debugging in Hardware-In-the-Loop (HIL) & On Vehicle Testing
Data acquisition and signal plotting
Parameter tuning
Simulink BlocksRegime_moteur
tr/min
15 21 27 33 39 45 51 57 63 69 75
2960
2529
2098
1667
1236
805
Temps : 58.52Regime_moteur : 2492
Temps : 34.22Regime_moteur : 2603
Temps : 43.79Regime_moteur : 2450
Vitesse_vehicule
km/h
15 21 27 33 39 45 51 57 63 69 75
121
97
73
48
24
0
Temps : 58.52Vitesse_vehicule : 70
Temps : 34.22Vitesse_vehicule : 33
Temps : 43.79Vitesse_vehicule : 49
Avance_finale
øVil
15 21 27 33 39 45 51 57 63 69 75
57
34
11
-11
-34
-57
Temps : 58.52Avance_finale : 31.125
Temps : 34.22Avance_finale : 47.25
Temps : 43.79Avance_finale : 51.75
Engine_load Av_dr_deg_rendement_totale
% %
15 21 27 33 39 45 51 57 63 69 75
100
80
60
40
20
0
100
80
60
40
20
0
Temps : 58.52Engine_load : 61.952547Av_dr_deg_rendement_totale : 0
Temps : 34.22Engine_load : 35.390991Av_dr_deg_rendement_totale : 1
POL_3011.AQC V:WWAR 077212 POLLU 04/11/30 09:09
Page 9
September 2015 I 9Property of Valeo. Duplication prohibited
Manually create a debugging variable representing chart statesStateflow Charts – The Classical Way
Debugging in Hardware-In-the-Loop (HIL) & On Vehicle Testing
Page 10
September 2015 I 10Property of Valeo. Duplication prohibited
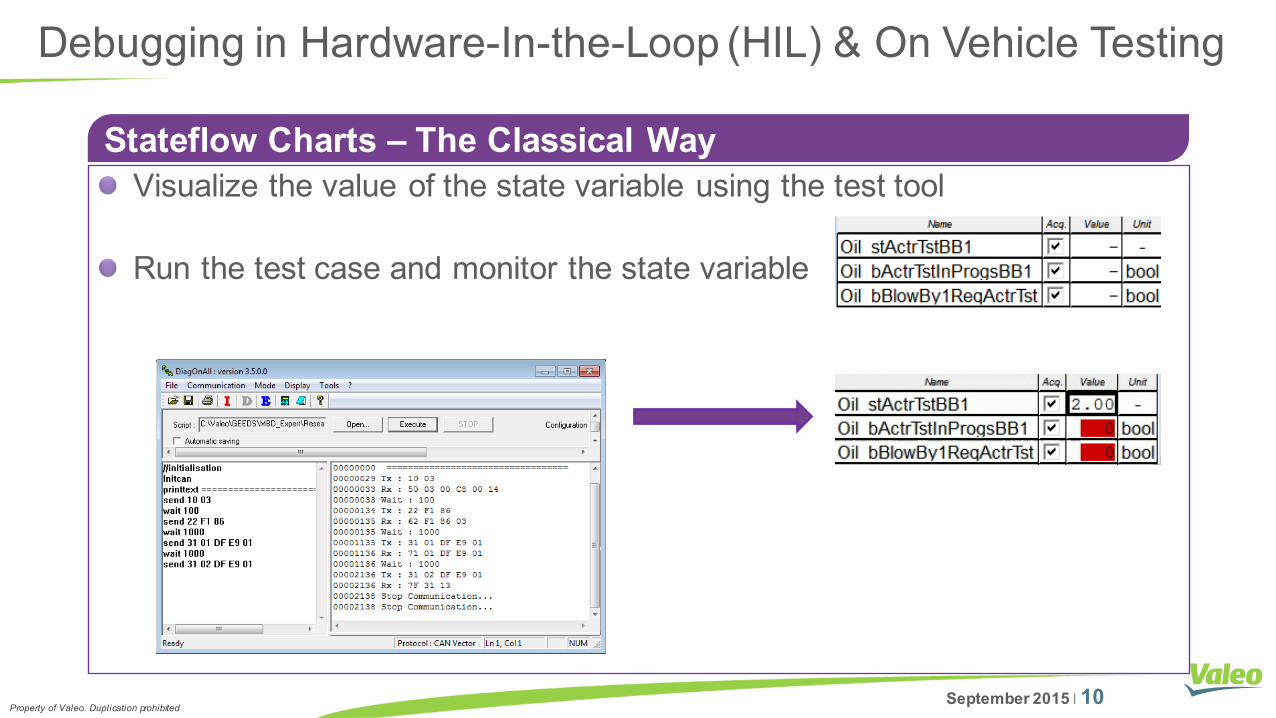
Visualize the value of the state variable using the test tool
Run the test case and monitor the state variable
Stateflow Charts – The Classical Way
Debugging in Hardware-In-the-Loop (HIL) & On Vehicle Testing
Page 11
September 2015 I 11Property of Valeo. Duplication prohibited
Debugging in Hardware-In-the-Loop (HIL) & On Vehicle Testing
Drawbacks of the Classical Way of Debugging Stateflow Charts
Manually Define State VariablesExtra development effort is requiredAdditional memory consumption
Poor Visualization of Statecharts;; No Statechart Animation
Isn’t there a better way to debug Stateflow charts running on ECU?
Valeo solution with visualization and animation of Stateflow models based on “Simulink External Mode” will be presented
Stateflow Charts – The Classical Way
Page 12
September 2015 I 12Property of Valeo. Duplication prohibited
Testing & Debugging Techniques in MBD
Focus on « Simulink External Mode »
Valeo Solution in Details
Conclusion
1
2
4
3
3
12
17
25
Page 13
September 2015 I 13Property of Valeo. Duplication prohibited
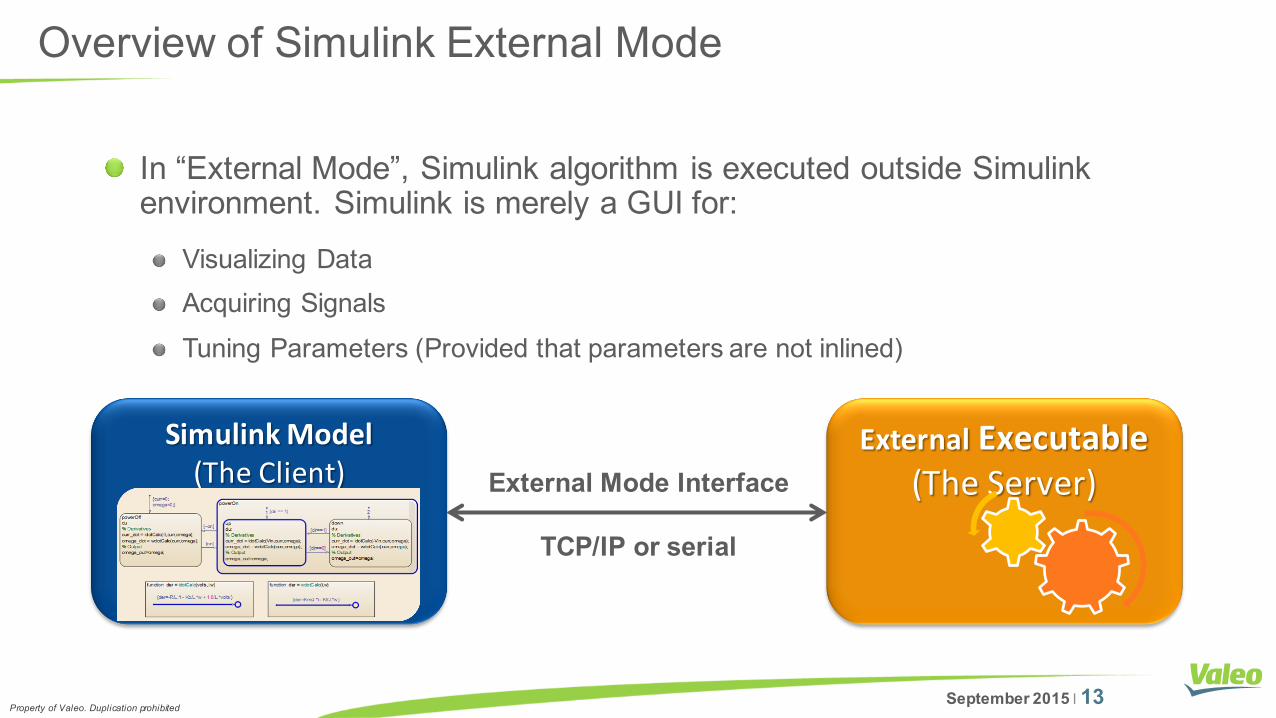
In “External Mode”, Simulink algorithm is executed outside Simulink environment. Simulink is merely a GUI for:
Visualizing DataAcquiring SignalsTuning Parameters (Provided that parameters are not inlined)
External Mode Interface
TCP/IP or serial
Overview of Simulink External Mode
Simulink Model(The Client)
External Executable(The Server)
Page 14
September 2015 I 14Property of Valeo. Duplication prohibited
Configure Code Generation in External Mode
In the model «Code Generation» configuration, configure:
« System target file » as « ert.tlc »« Interface » as « External Mode »« Transport Layer » as « tcpip » or « RS-232 (serial) »
Page 15
September 2015 I 15Property of Valeo. Duplication prohibited
Steps to start External Mode communication
Build the Target Executable
Both code and external executable are generated
Run the External Executable
Select Simulink simulation as“External” Mode
Connect to the Target
Start Simulation in External Mode
1
2
3
4
5
Page 16
September 2015 I 16Property of Valeo. Duplication prohibited
External Mode Remarks
External mode uses “Code Instrumentation”Includes extra header filesAdds code for data exchange and for transport layerAdds extra variables
ERT supports only two transport layers, namely, TCP/IP and RS-232 (serial).No direct support for automotive communication protocols.
Page 17
September 2015 I 17Property of Valeo. Duplication prohibited
Testing & Debugging Techniques in MBD
Focus on « Simulink External Mode »
Valeo Solution in Details
Conclusion
1
2
4
3
3
12
17
25
Page 18
September 2015 I 18Property of Valeo. Duplication prohibited
Valeo Solution in Details
To prepare environment, 3 steps are needed
ECU(running inthe car)
Generated code from Stateflow
Model
CAN Bus Interface
Visualization / Animation
Page 19
September 2015 I 19Property of Valeo. Duplication prohibited
Model State info on ECU
Use Embedded Coder (ert.tlc) to generate a Global structure “DW_<modelName>”, containing active state of each state machine.
typedef struct ...uint8_T is_StateChart_1; /* ... */uint8_T is_StateChart_2; /* ... */uint8_T is_StateChart_3; /* ... */uint8_T is_StateChart_4; /* ... */... DW_<modelName>;
ECU(running inthe car)
Generated code from Stateflow
Model
No need for code instrumentation on Target !
Page 20
September 2015 I 20Property of Valeo. Duplication prohibited
CAN Bus Interface
1st Step: Exchanging Model States Info from ECU to PC
ECU(running inthe car)
Generated code from Stateflow
Model
XCP / CCPDriver
CANDriver
StateflowModel
CAN Driver
XCP / CCP DriverVa
leo To
ol
Configurations:-‐ Baud Rate-‐-‐ XCP/CCP
-‐-‐ CAN/LIN/FlexRay-‐-‐ Struct Memory address
Add XCP/CCP and CAN drivers on laptop
Configure reception of data in Valeo Tool
Page 21
September 2015 I 21Property of Valeo. Duplication prohibited
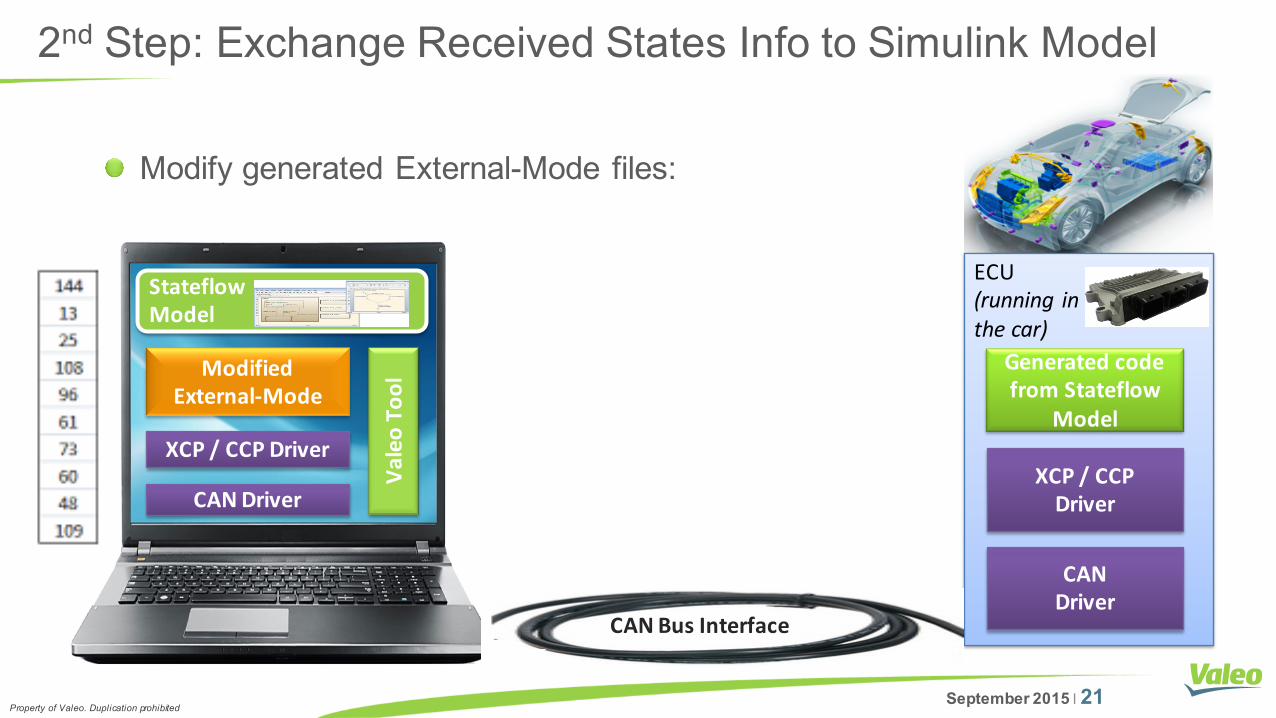
Modify generated External-Mode files:
2nd Step: Exchange Received States Info to Simulink Model
ECU(running inthe car)
Generated code from Stateflow
Model
XCP / CCPDriver
CANDriver
StateflowModel
CAN Driver
XCP / CCP Driver
Valeo To
olModified
External-‐Mode
CAN Bus Interface
Page 22
September 2015 I 22Property of Valeo. Duplication prohibited
2nd Step: Exchange Received States Info to Simulink Model
StateflowModel
CAN Driver
XCP / CCP Driver
Valeo To
olModified
External-‐Mode
Modifications in details:
Comments all direct assignation to the states valuesGenerates additional C files that directly update the states value with the values received from ECU
Page 23
September 2015 I 23Property of Valeo. Duplication prohibited
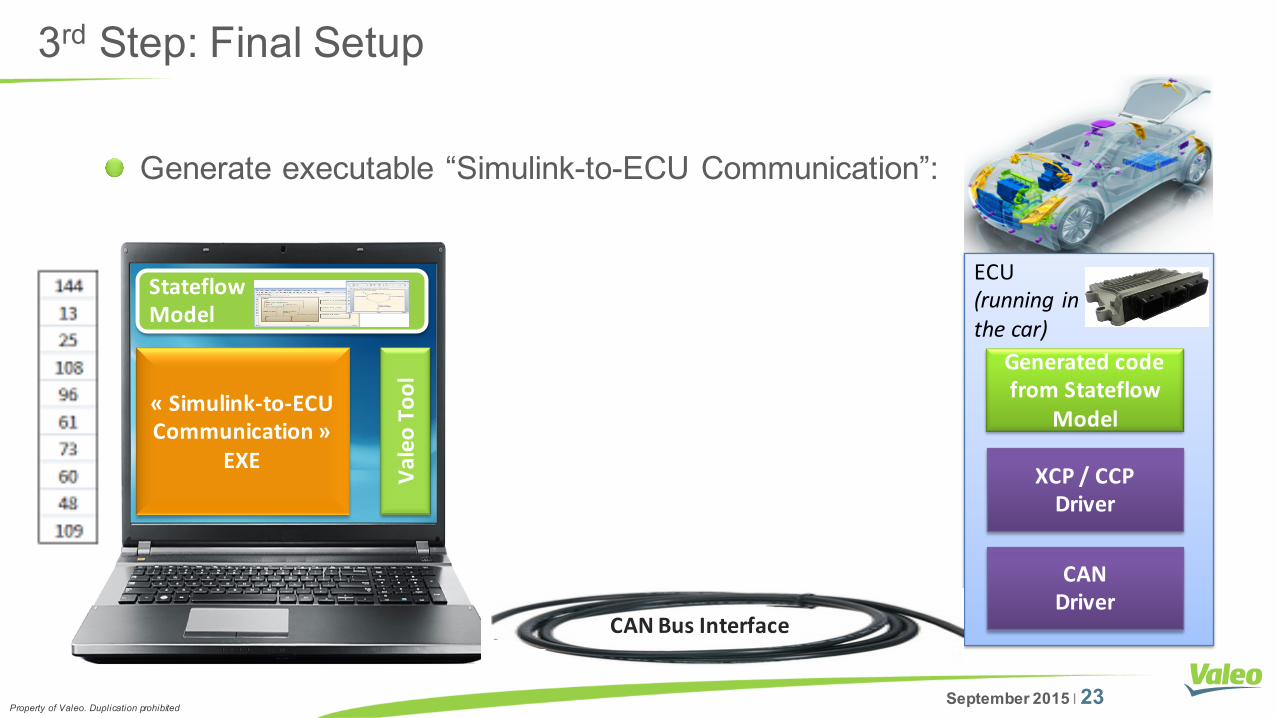
3rd Step: Final Setup
ECU(running inthe car)
Generated code from Stateflow
Model
XCP / CCPDriver
CANDriver
StateflowModel
« Simulink-‐to-‐ECUCommunication »
EXE
Valeo To
ol
Generate executable “Simulink-to-ECU Communication”:
CAN Bus Interface
Page 24
September 2015 I 24Property of Valeo. Duplication prohibited
Exchanges value for animation
Then, launch Stateflow Debugging ActivityUser Valeo Tool Simulink Model Simulink-to-ECU
Communication EXE ECU
Starts EXE
Requests to start External Mode Communication
Initiates CommunicationRequests States Value
Sends States Value
Requests States Value
Sends States ValueExchanges value for animation
Request to stop Comm.Kill EXE
……
Request to start Comm.
Page 25
September 2015 I 25Property of Valeo. Duplication prohibited
Testing & Debugging Techniques in MBD
Focus on « Simulink External Mode »
Valeo Solution in Details
Conclusion
1
2
4
3
3
12
17
25
Page 26
September 2015 I 26Property of Valeo. Duplication prohibited
Conclusion
Using “Simulink External Mode”,and with our in-house tool, wewere able to read Statechartinformation in real-time fromthe ECU and accordinglyanimate Stateflow chartson PC.
This technique facilitates a lotdebugging of Statecharts for on-vehicle tests.
Next step is to support FlexRay and LIN communication protocols.
Page 27
September 2015 I 27Property of Valeo. Duplication prohibited