In this paper attention is paid to low frequency wave drift forces on a semi-submersible moored in irregular head waves and to the low frequency horizontal motions caused by the drift forces.
20
THE LOW FREQUENCY MOTIONS OF A SEMI-SUBMERSIBLE IN WAVES J.A. Pinkster and R.H.M. Huijsmans Netherlands Ship Model Basin, The Netherlands SUMMARY In this paper attention is paid to low frequency wave drift forces on a semi-submersible moored in irregular head waves and to the low frequency horizontal motions caused by the drift forces. The wave drift forces are computed based on three-dimensional potential theory using the direct integration method. Time records of the low frequency drift force in irregular waves are computed using the second order impulse response function technique. Results of this method are compared with results of the direct summation method. The comparison shows that use of the sec- ond order impulse response function leads to numerically accurate results. A computed low fre- quency drift force record is compared with a measured drift force record. The comparison shows that the predictions are qualitatively correct but some 30 to 40 per cent lower than measured data. Results of time domain simulation computations of the low frequency surge motions in ir- regular head seas are compared with measurements. A discussion is given regarding differences between computations and measurements.
Transcript
THE LOW FREQUENCY MOTIONS OF A SEMI-SUBMERSIBLE I N WAVES
J . A . P i n k s t e r and R.H.M. Huijsmans Netherlands Ship Model Basin, The Netherlands
SUMMARY
I n t h i s paper a t t e n t i o n i s pa id t o low frequency wave d r i f t f o r c e s on a semi-submersible moored i n i r r e g u l a r head waves and t o t h e low frequency h o r i z o n t a l motions caused by t h e d r i f t fo rces .
The wave d r i f t f o r c e s a r e computed based on three-dimensional p o t e n t i a l theory using t h e d i r e c t i n t e g r a t i o n method. Time records of t h e low frequency d r i f t f o r c e i n i r r e g u l a r waves a r e computed using t h e second o rder impulse response funct ion technique. Resul ts of t h i s method a r e compared with r e s u l t s of t h e d i r e c t summation method. The comparison shows t h a t use of t h e sec- ond o rder impulse response funct ion l e a d s t o numerically accura te r e s u l t s . A computed low f r e - quency d r i f t f o r c e record is compared with a measured d r i f t f o r c e record. The comparison shows t h a t the p r e d i c t i o n s a r e q u a l i t a t i v e l y c o r r e c t bu t some 30 t o 40 pe r cen t lower than measured da ta . Resu l t s of time domain s imula t ion computations of the low frequency surge motions i n ir- r e g u l a r head s e a s a r e compared with measurements. A d i scuss ion i s given regarding d i f f e r e n c e s between computations and measurements.
NOMENCLATURE
all = added mass i n surge
b l l = l i n e a r damping c o e f f i c i e n t i n surge
b2 = q u a d r a t i c damping c o e f f i c i e n t
C = r e s t o r i n g c o e f f i c i e n t of t h e mooring system
dL = l eng th element of the w a t e r l i n e
dS = sur face element of S o r So - F = fo rce vec to r wi th components F,, F2 and F3
~ ( 2 ) = second o rder f o r c e vec to r wi th components F : ~ ) l F:~) and F$*)
g ( 2 ) (t,, t2) = q u a d r a t i c impulse response func t ion
M = mass mat r ix
m = mass of the v e s s e l i n a i r - N = outward po in t ing normal u n i t vec to r of a su r face elernent dS r e l a t i v e t o a r i g h t -
handed system of co-ordinates wi th o r i g i n i n t h e c e n t r e of g r a v i t y and Xj-axis, v e r t i c a l l y upwards
= outward po in t ing normal u n i t vec to r of a su r face element dS referenced t o t h e body axes wi th components n n2 and n3
n, ( a ) = d i r e c t i o n cosine of a l eng th element dL i n l o n g i t u d i n a l d i r e c t i o n
'ij = in-phase p a r t of the q u a d r a t i c t r a n s f e r funct ion
P = pressure ob ta inab le from B e r n o u l l i ' s equation
Qi j = quadrature p a r t of t h e q u a d r a t i c t r a n s f e r func t ion
S = ins tantaneous wetted s u r f a c e
S 0 = mean wetted su r face
T. 1 j
= amplitude of the q u a d r a t i c t r a n s f e r funct ion
t = time
5' t2 = time s h i f t s
%(l) = f i r s t o rder motion of a s u r f a c e element dS - Xg
= motion vec to r of t h e c e n t r e of g r a v i t y wi th components X lg l X2g and X 3g
~ ( 1 ) g
= f i r s t o rder o s c i l l a t o r y component of t h e motions of t h e c e n t r e of g r a v i t y
;(l) = f ' r t order angular motion vec to r wi th components xi1) ( r o l l ) , xi1) ( p i t c h ) and xa l f (yawl
E i = random phase uniformly d i s t r i b u t e d over 0 - 2n
E ( L ) = phase angle of t h e r e l a t i v e wave e l e v a t i o n a t p o i n t II r e l a t e d t o t h e undis turbed i wave c r e s t pass ing t h e c e n t r e of g r a v i t y
(1) 5 i = amplitude of t h e i - t h r e g u l a r wave component
<(l) (t) = time dependent wave e l e v a t i o n
(l) ' ( L ) = t r a n s f e r funct ion of t h e amplitude of t h e f i r s t o rder r e l a t i v e wave e l e v a t i o n a t =ri p o i n t L i n t h e wa te r l ine
(t,!t) = time dependent r e l a t i v e wave e l e v a t i o n i n a p o i n t L a long t h e wa te r l ine
o( l ) = f i r s t o rder v e l o c i t y p o t e n t i a l inc lud ing con t r ibu t ions from t h e incoming waves, d i f f r a c t i o n and body motions
= second o rder d i f f r a c t i o n p o t e n t i a l
= second order "undisturbed wave" p o t e n t i a l
W . = frequency of i - t h component
INTRODUCTION
I n o f f shore a c t i v i t i e s t h e types of work f o r which semi-submersibles a r e employed, a r e continuously inc reas ing . I n i t i a l l y t h e s e v e s s e l s were used a s s t a b l e pla t forms from which d r i l - l i n g a c t i v i t i e s were c a r r i e d ou t . Due t o t h e c o n s i s t e n t l y super io r seakeeping performance of t h e s e v e s s e l s compared with barges and s h i p s , such v e s s e l s a r e now a l s o being used f o r a v a r i e t y of o t h e r t a s k s such as product ion pla t forms, h o t e l p la t forms, mul t i - funct ional s e r v i c e v e s s e l s and crane vesse l s . The e a r l y semi-submersibles cons i s t ed of r e l a t i v e l y s l e n d e r elements. This was i n keeping with t h e b a s i c idea behind t h e design of such v e s s e l s which s t r o v e towards a f l o a t i n g s t r u c t u r e which was " t ransparen t" f o r the waves and which gained most of i ts buoyancy from submerged f l o a t e r s ou t of reach of t h e g r e a t e s t wave motion. Such design phi losophies l e d t o semi-submersibles which, although i n many cases possessed e x c e l l e n t motion c h a r a c t e r i s t i c s i n waves, were l i m i t e d i n t h e i r c a p a b i l i t y t o accept l a r g e v a r i a t i o n s i n deck load. This was i n p a r t due t o the r e l a t i v e l y s l ender columns and correspondingly smal l waterplane a r e a s of such v e s s e l s .
With the development of t h e o r e t i c a l means, such a s given by Hooft [ l ] , t o analyse t h e complex hydrodynamic aspec t s of semi-submersibles it became apparent t h a t wave t ransparency i s a design requirement which i s t o o simple and unnecessar i ly r e s t r i c t i v e f o r designing such ves- s e l s from t h e p o i n t of view of sea k ind l iness . It appeared t h a t wave loads on such v e s s e l s could be inf luenced and t h e corresponding motion could be optimised, f o r i n s t a n c e , by a l t e r a t i o n i n geometry. Thus, more recen t semi-submersible designs have become considerably l e s s s l ender and l e s s wave t ransparen t than t h e i r predecessors , whi le r e t a i n i n g t h e favourable motion charac te r - i s t i c s i n waves.
The use of l a r g e r diameter columns and t h e inc rease i n displacement, however, a l s o r e s u l t i n a p o t e n t i a l l y g r e a t e r c a p a b i l i t y of t h e s t r u c t u r e t o d i s t u r b and r e f l e c t t h e incoming waves. This may have a s i g n i f i c a n t e f f e c t on t h e low frequency second o rder wave f o r c e s on t h e s t r u c - t u r e . These f o r c e s , a l s o known a s low frequency wave d r i f t f o r c e s , a r e a s s o c i a t e d with t h e capa- b i l i t i e s of a s t r u c t u r e t o r e f l e c t waves and can generate l a r g e amplitude low frequency motions i n moored v e s s e l s r e s u l t i n g i n high peak mooring loads . I n t h e case of dynamically pos i t ioned v e s s e l s , these f o r c e s a r e of importance from the p o i n t of view of s t a t i o n keeping accuracy and t h r u s t e r s i z ing .
I n o rder t o i n v e s t i g a t e t h e m e r i t s of a p a r t i c u l a r design f o r a semi-submersible from t h e p o i n t of view of wave d r i f t fo rces and t h e r e s u l t a n t motion, a theory which embodies a l l r e l e v a n t a spec t s and which can be used a s a b a s i s f o r computation, i s needed. I n t h e p a s t , a number of t h e o r i e s have been pu t forward by means of which t h e wave d r i f t f o r c e s on a semi- submersible could be computed. See f o r ins tance Wahab 1 2 1 , P i j f e r s and Brink [31, F e r r e t t i and Ber ta E41 and Karppinen [5] . The l a s t of t h e s e au thors presented a computational method which is based on p o t e n t i a l theory and t h e assumption t h a t t h e elements of a semi-submersible such a s t h e columns and f l o a t e r s a r e s l e n d e r and from a hydrodynamic p o i n t of view, do n o t i n t e r a c t . The t o t a l second order wave d r i f t f o r c e i s then t h e sum of t h e d r i f t f o r c e s on t h e elements i n t h e absence of a l l o t h e r elements. According t o p o t e n t i a l theory which d i s r e g a r d s viscous e f f e c t , t h e d r i f t f o r c e s a r e a q u a d r a t i c func t ion of t h e wave he igh t . Wahab [ 2 1 , P i j f e r s and Brink 131 and F e r r e t t i and Ber ta [4 ] a l s o make use of t h e assumption of s l enderness and t h e absence of hydrodynamic i n t e r a c t i o n of t h e elements of the semi-submersible. The hydrodynamic f o r c e i n each element i s determined through t h e use of Morison's equat ion and t h e r e l a t i v e v e l o c i t y between t h e f l u i d and t h e elements. The t o t a l fosce i s found by summation over t h e elements. The d r i f t f o r c e i s def ined a s t h e mean value of t h e t o t a l f o r c e averaged over a wave per iod. Resul ts of c a l c u l a t i o n i n d i c a t e t h a t v iscous e f f e c t s a r i s i n g from t h e d rag term i n Morison's equat ion a r e of s i g n i f i c a n t importance and t h a t t h e d r i f t f o r c e s a r e p ropor t iona l t o about t h e t h i r d power of t h e wave height . I n none of these cases a r e r e s u l t s of computation compared with experimental r e s u l t s , however, s o t h e i s s u e a s t o whether t h e wave d r i f t f o r c e s on semi-submersible s t r u c t u r e s a r e s i g n i f i c a n t l y inf luenced by viscous e f f e c t s o r t h a t t h e s e f o r c e s may be determined by methods which neg lec t hydrodynamic i n t e r a c t i o n between t h e elements of t h e cons t ruc t ion i s e s s e n t i a l l y l e f t u n s e t t l e d .
I n t h i s paper experimental r e s u l t s of model t e s t s wi th a semi-submersible i n i r r e g u l a r head waves w i l l be presented. The time domain record of the measured wave d r i f t f o r c e i n i r r e g - u l a r waves is compared with r e s u l t s of computation. The computations a r e based on three-dimen- s i o n a l p o t e n t i a l theory and t ake i n t o account t h e hydrodynamic i n t e r a c t i o n between t h e elements.
Resul ts of time domain s imulat ion of t h e low frequency surge motions i n i r r e g u l a r head waves a r e a l s o compared with experimental r e s u l t s . Before comparing t h e r e s u l t s of computations and exper- iments a b r i e f account w i l l be given of the method of computation employed f o r determinat ion of t h e wave d r i f t fo rces and the s imulat ion techniques used t o determine t h e low frequency compo- nen t s of t h e wave d r i f t fo rce and t h e h o r i z o n t a l surge motion of t h e semi-submersible.
WAVE DRIFT FORCES
Computations of wave d r i f t fo rces a r e based on t h e d i r e c t i n t e g r a t i o n method, see r e f . L 6 1 and [ 7 1 . By t h i s method t h e wave d r i f t fo rces a r e found from t h e second order term i n the following express ion f o r t h e hydrodynamic force:
Following t h e development given i n r e f . 161 we ob ta in t h e following express ion f o r t h e second o rder wave fo rce :
For t h e purpose of t ime domain s imulat ion of wave d r i f t fo rces equation (2) i s unsu i t ab le i n i ts p r e s e n t form. This i s due t o t h e l a r g e amount of d a t a which must be computed a t each t i m e s t e p i n o rder t o be ab le t o c a r r y ou t t h e i n t e g r a t i o n s around t h e wa te r l ine and over t h e h u l l su r face . It i s computationally more convenient t o use equat ion (2) t o compute frequency domain q u a d r a t i c frequency response o r t r a n s f e r func t ions , which i n t u r n can be transformed i n t o time domain second o rder impulse response funct ions . These second o rder impulse response func t ions , when convoluted with t h e undisturbed wave t r a i n , y i e l d time records of t h e second o rder d r i f t fo rces . See r e f . [ B ] . This procedure makes i t p o s s i b l e t o compute wave d r i f t fo rce r e c o ~ d s f o r a r b i t r a r y wave records i n a r e l a t i v e l y s t ra igh t fo rward and economic manner.
I n t h e following a b r i e f d e s c r i p t i o n i s given of the procedure t o ob ta in t h e q u a d r a t i c , t r a n s f e r funct ion f o r t h e second o rder wave d r i f t fo rces .
QUADRATIC TRIlNSFER FUNCTION
The t o t a l q u a d r a t i c t r a n s f e r func t ion i s s p l i t up i n con t r ibu t ions a r i s i n g from t h e fo l - lowing components of equat ion ( 2 ) :
I : F i r s t o rder r e l a t i v e wave e l e v a t i o n
I1 : Pressure drop due t o f i r s t order v e l o c i t y
- J J - t p l ~ o ( ' ) 12.;i.ds ( 4 )
0
111: Pressure due t o product of g r a d i e n t of f i r s t o r d e r p ressure and f i r s t o r d e r motion
I V : Contr ibut ion due t o products of f i r s t o rder angular motions and i n e r t i a f o r c e s
V : Contr ibut ion due t o second o r d e r p o t e n t i a l s
The procedure t o o b t a i n t h e q u a d r a t i c t r a n s f e r func t ions of t h e fo rces dependent on f i r s t o rder q u a n t i t i e s (I, 11, I11 and I V ) w i l l be i l l u s t r a t e d by t ak ing t h e low frequency p a r t of t h e lon- g i t u d i n a l component of t h e f o r c e con t r ibu t ion due t o t h e r e l a t i v e wave e leva t ion :
I n i r r e g u l a r long-cres ted waves t h e e l e v a t i o n , t o f i r s t o rder , of the incoming undisturbed waves - r e f e r r e d t o the mean p o s i t i o n of t h e c e n t r e of g r a v i t y of t h e f l o a t i n g body - may be w r i t t e n a s :
The f i r s t o rder r e l a t i v e wave e l e v a t i o n a t a p o i n t 9. on t h e wa te r l ine of t h e body may be w r i t - t e n a s follows:
S u b s t i t u t i o n of (10) i n equat ion ( 8 ) l eads t o :
+ high frequency terms (11)
where Pij and Q . a r e t h e in-phase and out-of-phase components of the time independent t r a n s - I l j l
£ e r func t ion with:
QijI = Q I ( w i 1 w j ) = - J f ~ 9 3 ' ( L ) . 5; ( L ) sin{^, ( L ) - ( L ) Inl ( L ) .dL (13) WL ri j i j
Taking the low frequency p a r t of t h e square of t h e wave e l e v a t i o n given by equat ion ( 9 ) r e s u l t s i n :
Comparison with equa t ion (11) shows t h a t P . and Qi j a r e t r a n s f e r func t ions which give t h a t 11, I
p a r t of t h e wave d r i f t i n g f o r c e which i s in-phase a n d - o u t - ~ f - ~ h a s e r e s p e c t i v e l y wi th t h e low frequency p a r t of t h e square of t h e i n c i d e n t wave e leva t ion .
It w i l l be c l e a r t h a t s i m i l a r developments can be made f o r o t h e r con t r ibu t ions t o t h e wave d r i f t i n g f o r c e s which depend only on f i r s t o rder q u a n t i t i e s . The con t r ibu t ion V due t o second o rder p o t e n t i a l s i s approximated using r e s u l t s of f i r s t o rder wave loads; see r e f . [7]. The t o t a l in-phase and out-of-phase t r a n s f e r func t ions a r e found by simple summation of t h e c o n t r i b u t i o n s from t h e f i v e components. The wave d r i f t i n g f o r c e s may t h u s be presented a s t r a n s - f e r func t ions which, a s can be seen from t h e aforegoing, a r e a funct ion of two frequencies . I n g e n e r a l , t h e q u a d r a t i c t r a n s f e r func t ions w i l l a l s o be func t ions of t h e d i r e c t i o n of t h e wave S.
Based on a wave e l e v a t i o n a s given by equat ion (9 ) t h e t o t a l wave d r i f t f o r c e i s found from:
i n which P . . and Q i j a r e found by summation of c o n t r i b u t i o n s I through V. 13
DRIFT FORCE I N A REGULAR WAVE GROUP
We consider t h e f i r s t o rder wave e l e v a t i o n i n a regu la r wave group c o n s i s t i n g of two reg- u l a r waves wi th frequency U . and w -
j-
= jl) .cos ( w l t + c l ) + <;l) .cos ( u 2 t + C 2 )
The second o rder f o r c e assoc ia ted with such a wave t r a i n has the following form:
From equat ion (17) it i s seen t h a t t h e second o rder f o r c e con ta ins two cons tan t compo- nents . Each of these components represen t s t h e cons tan t f o r c e which would be found i f t h e wave t r a i n cons i s t ed of a s i n g l e r e g u l a r wave with frequency w l o r w2 r e spec t ive ly . This shows t h a t , al though t h e f o r c e i s a non-linear phenomenon, t h e cons tan t o r mean second order f o r c e i n a wave t r a i n c o n s i s t i n g of a superpos i t ion of r egu la r waves i s t h e sum of t h e mean f o r c e s found f o r each of t h e component waves. The quadra t i c t r a n s f e r funct ion:
g ives t h e mean second o rder fo rce i n r e g u l a r waves wi th frequency wl : I n l i t e r a t u r e dea l ing with t h e mean second o rder fo rces on f l o a t i n g o b j e c t s i n r e g u l a r o r irregular waves t h i s i s o f t e n expressed a s a funct ion dependent on one frequency wl . The above equat ions show t h a t t h e t r a n s f e r func t ion f o r t h e mean o r constant p a r t i s , however, only a s p e c i f i c case of t h e gen- e r a l q u a d r a t i c t r a n s f e r funct ion P(wlrw2) f o r t h e f o r c e i n r e g u l a r wave groups.
Besides the cons tan t p a r t s t h e second o rder f o r c e con ta ins low frequency p a r t s wi th a frequency corresponding t o t h e d i f f e r e n c e frequency wl - w2 of t h e component r e g u l a r waves. It is seen t h a t t h e amplitudes of the in-phase and out-of-phase p a r t s depend on t h e sum of t h e in-phase q u a d r a t i c t r a n s f e r func t ions P12 and P21 and t h e d i f f e r e n c e of t h e out-of-phase func- t i o n s Q12 and Q21.
SYMMETRY OF THE QUADRATIC TRANSFER FUNCTIONS
From equat ion (1'7) it is seen t h a t t h e t r a n s f e r func t ions do not appear i n i s o l a t i o n but r a t h e r i n p a i r s . In genera l , t h e in-phase and out-of-phase components of t h e quadra t i c t r a n s f e r func t ions a s determined from equa t ions ( 3 ) through ( 7 ) f o r combinations of wl and w2 w i l l be s o t h a t , f o r ins tance :
However, s i n c e t h e f o r c e a s given i n equat ion (17) depends on the sum o r d i f f e r e n c e of t h e com- ponents of t h e q u a d r a t i c t r a n s f e r func t ions these may be s o reformulated t h a t t h e fol lowing symmetry r e l a t i o n s a r e v a l i d :
P(w1,w2) = P(w2'w1) (20)
Q ( w 1 , w 2 ) = - Q ( w 2 1 ~ 1 ) (21)
The in-phase component P(w1,w2) of t h e q u a d r a t i c t r a n s f e r funct ion of t h e t o t a l second o rder
fo rce t akes t h e form of a matr ix which i s symmetrical about t h e diagonal f o r which w l i s equa l t o w2 whi le t h e out-of-phase component Q ( w 1 , w 2 ) i s anti-symmetrical about the diagonal .
EVALUATION OF QUADRATIC TRANSFER FUNCTIONS
Evaluation of t h e va r ious components of t h e q u a d r a t i c t r a n s f e r funct ions of t h e low f r e - quency wave d r i f t i n g f o r c e s requ i res d e t a i l e d knowledge of t h e f i r s t o rder vesse l motions and f l u i d motions. For i n s t a n c e , a s shown by equat ions (12) and ( 1 3 ) , evaluat ion of con t r ibu t ion I r e q u i r e s knowledge of t h e r e l a t i v e wave e l e v a t i o n amplitudes and phase angles around t h e water- l i n e .
A numerical method by means of which such d e t a i l e d information may be obtained (us ing a d i s t r i b u t i o n of sources over t h e mean wetted su r face of t h e body) has been developed by Boreel 191 and Van Oortmerssen [10] .
TIME DOMAIN REPRESENTATION OF THE MEAN AND LOW FREQUENCY SECOND ORDER FORCES
According t o D a l z e l l [ 81 the low frequency second o rder fo rces can be computed given t h e q u a d r a t i c t r a n s f e r func t ion and the time record of t h e wave e leva t ion using the fol lowing r e l a - t i o n s h i p :
The q u a d r a t i c impulse response func t ion g ( 2 ) (t ,t ) i s der ived from t h e fol lowing express ion: 1 2
i n which:
G ( ~ ) ( w l , w 2 ) = complex q u a d r a t i c t r a n s f e r funct ion
From equat ion (22) it i s seen t h a t i f the q u a d r a t i c impulse response func t ion g ( 2 ) ( t lrt2) i s known the time record of t h e low frequency second o rder f o r c e s can be computed f o r a r b i t r a r y wave e l e v a t i o n records . The a p p l i c a b i l i t y of t h i s technique has been demonstrated ex tens ive ly and convincingly by D a l z e l l [ l11 using q u a d r a t i c t r a n s f e r func t ions f o r the second o rder f o r c e s obta ined from t e s t s i n i r r e g u l a r waves using c ross -b i - spec t ra l a n a l y s i s techniques.
Time records of second order wave d r i f t f o r c e s i n i r r e g u l a r waves can a l s o be generated based on equat ion (15) . I n such cases i t i s assumed t h a t t h e i r r e g u l a r waves a r e descr ibed by t h e s p e c t r a l dens i ty S ( U ) . The amplitudes ci a r e found from t h e following r e l a t i o n s h i p :
5
The phase angles gi a r e random with a homogeneous d i s t r i b u t i o n funct ion from zero t o 2n. The wave e l e v a t i o n follows from equat ion ( 9 ) . The wave d r i f t f o r c e record i s found from equa t ion (15) . It should be noted, however, t h a t i f t i m e records of d r i f t f o r c e s a r e generated f o r t h e purpose of s imulat ing t h e behaviour of moored v e s s e l s , t h e frequency d i f f e r e n c e s w i - w ' i n equat ion (15) must be chosen s u f f i c i e n t l y smal l i n o rder t o cover t h e frequency range 03 s ig - n i f i c a n t response of t h e moored v e s s e l with enough frequency bands. This w i l l genera l ly r e s u l t i n a l a r g e number, N I of d i s c r e t e f requencies w i being used t o desc r ibe t h e wave t r a i n of equa- t i o n ( 9 ) . This i n t u r n l e a d s t o a l a r g e number of summations t o be c a r r i e d ou t when genera t ing wave d r i f t f o r c e s according t o equation (15) .
Computational e f f o r t s involved with eva lua t ion of t h e wave d r i f t f o r c e record according t o equat ion (15) can be d r a s t i . c a l l y reduced by chosing e q u i d i s t a n t f requencies w i t o desc r ibe t h e wave spectrum. I f t h e frequency s t e p used t o desc r ibe t h e wave spectrum i s Aw then t h e wave record and hence t h e wave d r i f t f o r c e record become p e r i o d i c with a per iod o f :
According t o F o u r i e r ' s theorem t h e wave d r i f t f o r c e record can then be w r i t t e n i n t h e form of a s i n g l e summation a s follows:
where : wk = k. Aw
and from equat ion (15) Ak and Bk a r e found t o be:
wi th: 6k = 1 f o r k = 0
= 2 f o r k # O N = number of wave f requencies used t o desc r ibe t h e wave spectrum M = N - l
Use of equat ion (27) i n s t e a d of equat ion (15) involves computing the c o e f f i c i e n t s Ak and Bk according t o equat ions ( 2 9 ) , (30) and (25) us ing d a t a on t h e quadra t i c t r a n s f e r func t ions Pij and Qij. Once t h e s e c o e f f i c i e n t s a r e computed and s t o r e d t h e time record of t h e wave d r i f t f o r c e is computed from t h e s i n g l e summation of equat ion (27) .
I n t h i s paper time records of wave d r i f t f o r c e s on a semi-submersible i n i r r e g u l a r head waves a r e given, which have been computed using both t h e q u a d r a t i c impulse response func t ion technique and t h e d i r e c t summation technique of equa t ion (27) .
COMPUTATIONS OF LOW FREQUENCY MOTIONS
I n t h i s paper the low frequency wave d r i f t f o r c e induced surge motions of a semi-submers- i b l e i n head s e a s w i l l be presented. The equat ion of motion desc r ib ing t h e surge motion i s a s follows:
( m + al1)P1 + b j: + b P \P I + cx1 = ~ : ~ ) ( t ) 1 1 1 2 1 1 (31)
The added mass a l l was determined based on three-dimensional p o t e n t i a l theory computations. The damping c o e f f i c i e n t s b l l and b2 were obtained from st i l l water surge motion decay t e s t s i n t h e mooring system. The time record of t h e wave d r i f t f o r c e ~ 1 ~ ) ( t ) i s computed o f f - l i n e and s to red . A f t e r t h i s the equat ion of motion i s solved f o r t h e surge motion.
The aforementioned equat ion of motion i s r a t h e r simple. For more complex cases involving more degrees of freedom, and i n which t h e assumption of cons tan t added mass and damping i s n o t v a l i d anymore, a more s u i t a b l e s e t of equat ions of motion is chosen. See Van Oortmerssen 1101.
THE VESSEL
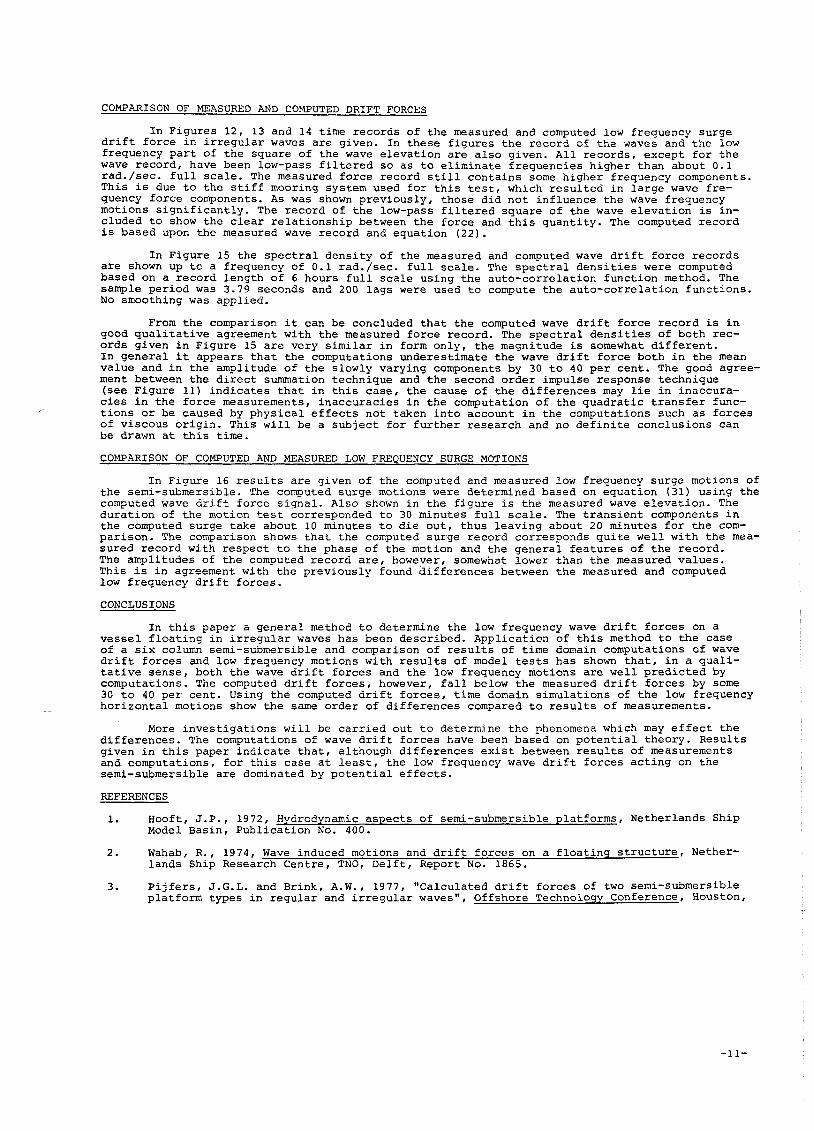
Computations and model t e s t s have been c a r r i e d o u t f o r a s i x column, two f l o a t e r semi- submersible. The main p a r t i c u l a r s a r e given i n Table I and Figure 1. The model was made of PVC t o a s c a l e of 1 t o 40.
For t h e computations us ing three-dimensional d i f f r a c t i o n theory, t h e wetted su r face of t h e h u l l is approximated using a t o t a l of 216 plane f a c e t elements. The wa te r l ine of t h e semi- submersible i s approximated using a t o t a l of 72 s t r a i g h t l i n e elements. The f a c e t schematisa- t i o n of one f l o a t e r and t h e w a t e r l i n e schemat isa t ion of one column a r e shown i n Figure 2.
Model t e s t s and computations were c a r r i e d o u t f o r a water depth corresponding t o 40 m f u l l s c a l e .
MODEL TESTS
Model t e s t s (and computations) have been c a r r i e d o u t f o r t h i s v e s s e l i n a v a r i e t y of cond i t ions . I n r e f . L71 r e s u l t s have been given on t e s t s i n r e g u l a r waves from ahead, abeam and from t h e bow q u a r t e r i n g d i r e c t i o n . I n t h e re fe rence mentioned, mean d r i f t f o r c e s i n regu- l a r waves and wave frequency motion response func t ions have been compared with r e s u l t s of com- pu ta t ions . The comparisons confirm t h a t , i n genera l , t h e wave frequency motions and mean d r i f t f o r c e s a r e accura te ly p r e d i c t e d by t h e computations. For f u r t h e r d e t a i l s we r e f e r t o t h e above mentioned re fe rence .
For t h i s paper a t t e n t i o n i s r e s t r i c t e d t o tests i n i r r e g u l a r head seas . Two t e s t s w i l l be discussed h e r e , v iz . : - One t e s t t o measure the time record of t h e surge wave d r i f t f o r c e (wave d r i f t fo rce t e s t ) .
- One t e s t t o measure t h e low frequency su rge motions wi th t h e v e s s e l moored i n a s o f t l i n e a r mooring sys tem (motion test) .
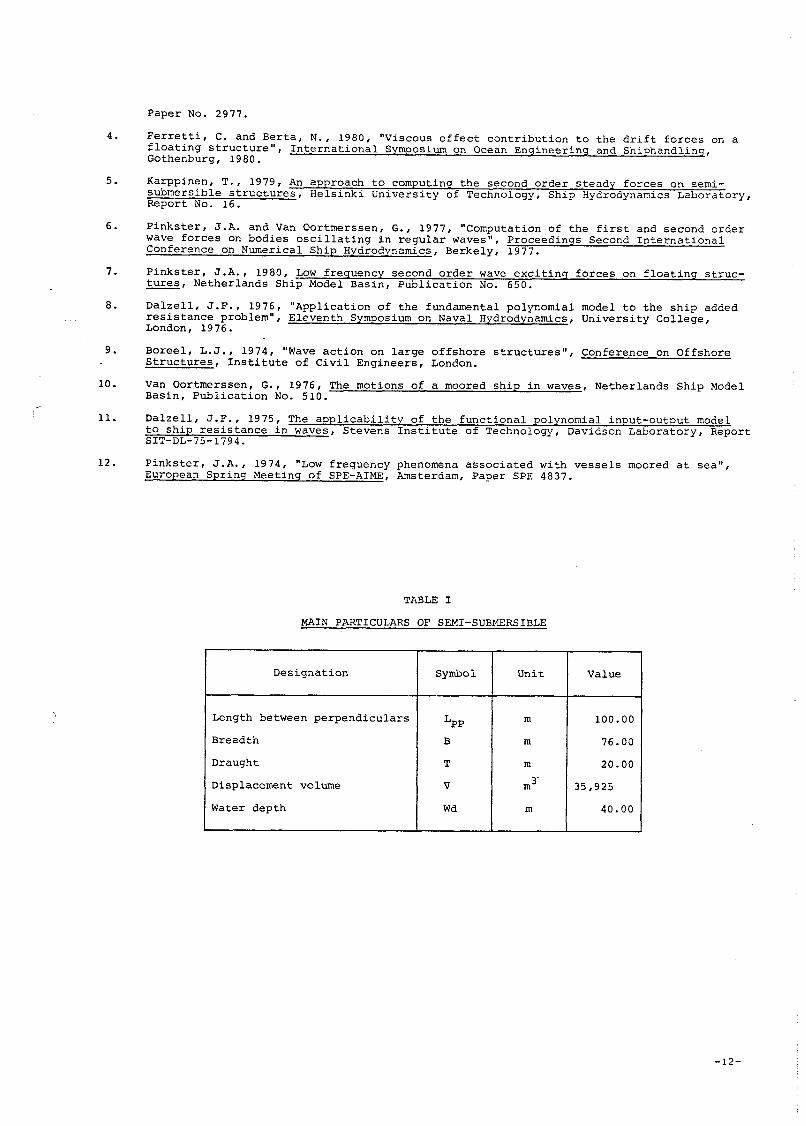
Besides t e s t s i n i r r e g u l a r head s e a s a su rge motion decay test was c a r r i e d ou t i n s t i l l wa te r w i th t h e v e s s e l moored i n t h e s o f t l i n e a r mooring system. I n F igu re 3 t h e wave spectrum i s shown o f t h e i r r e g u l a r waves f o r which model tests were c a r r i e d o u t .
TEST SET-UP FOR THE WAVE DRIFT FORCE TEST
The purpose o f t h i s t e s t was t o measure t h e wave d r i f t f o r c e s i n i r r e g u l a r waves i n such a way t h a t t h e r e s u l t s would be r e p r e s e n t a t i v e f o r t h e wave d r i f t f o r c e s a c t i n g on a s o f t moored semi-submersible. Th i s r e q u i r e d a t e s t se t -up which, on t h e one hand does n o t r e s t r i c t t h e wave f requency motions, and on t h e o t h e r hand r e s t r i c t s a s much a s p o s s i b l e low frequency su rge mo- t i o n s . The l a t t e r requi rement e n s u r e s t h a t t h e measured f o r c e s a r e n o t a f f e c t e d unduly by dynam- i c magn i f i ca t ion e f f e c t s .
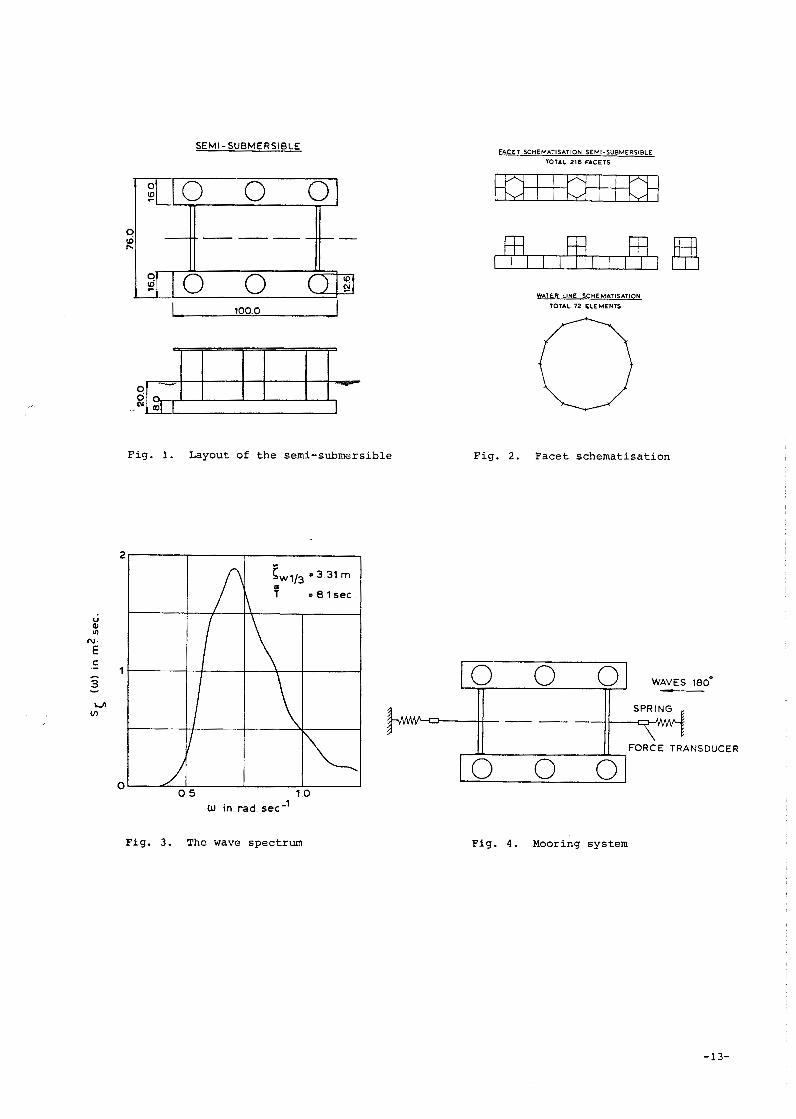
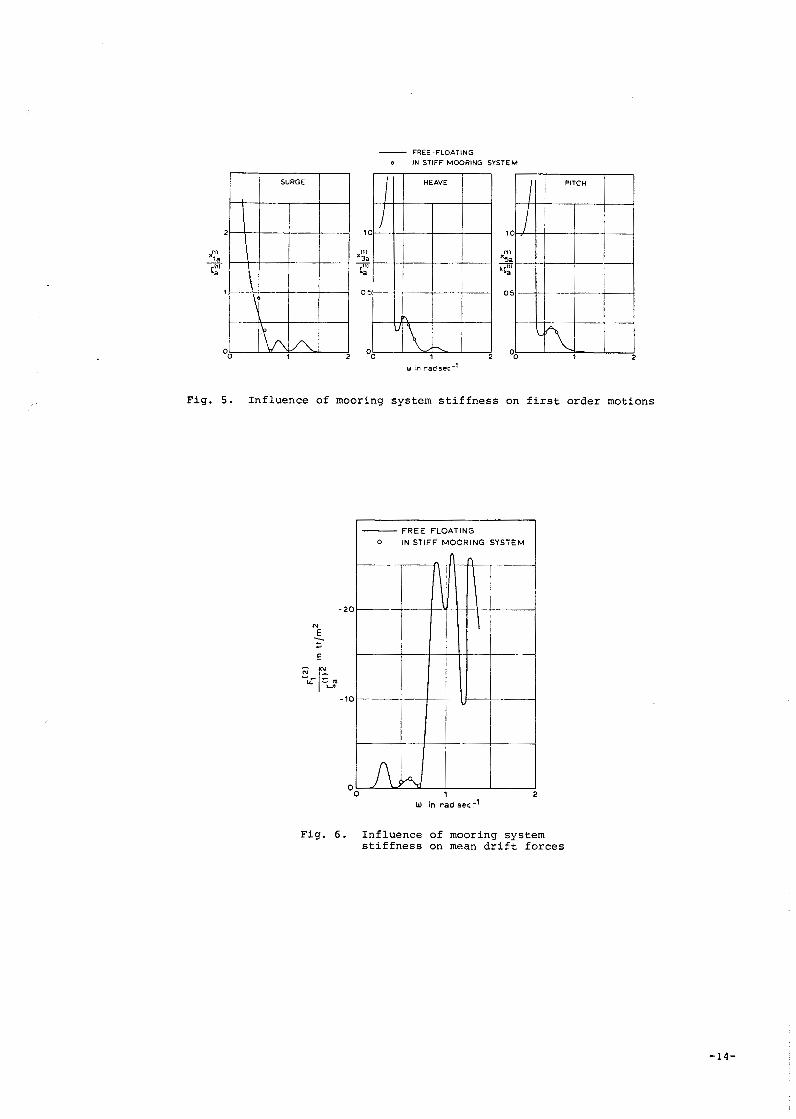
I n o r d e r t o measure t h e low frequency wave d r i f t f o r c e on t h e semi-submersible use was made of a s t i f f l i n e a r s p r i n g mooring system. The se t -up i s shown schemat i ca l ly i n F igu re 4. The s t i f f n e s s of t h e s p r i n g s was chosen such t h a t t h e n a t u r a l frequency o f t h e su rge motion was j u s t o u t s i d e t h e f requency range of t h e i r r e g u l a r waves. The n a t u r a l su rge frequency co r re - sponded wi th 0 .4 r ad . / s ec . f u l l s c a l e . I n s p i t e o f t h e r e l a t i v e l y l a r g e s t i f f n e s s of t h e moor- i n g system, t h e wave f requency motions were on ly s l i g h t l y a f f e c t e d i n t h e range of t h e wave f r e q u e n c i e s p r e s e n t i n t h e spectrum. Th i s i s shown i n F igu re 5 i n which r e s u l t s o f wave f r e - quency heave, p i t c h and s u r g e motion response computations a r e shown w i t h and wi thou t t h e e f f e c t of t h e s t i f f mooring system. I n F igu re 6 t h e e f f e c t of t h e mooring s t i f f n e s s on t h e computed v a l u e s o f t h e mean d r i f t f o r c e i n r e g u l a r waves i s shown. Again t h e i n f l u e n c e of t h e mooring s t i f f n e s s i s s m a l l , which i n d i c a t e s t h a t t h e low frequency wave d r i f t f o r c e on t h e v e s s e l i n t h e s t i f f mooring system i s p r a c t i c a l l y t h e same a s it would be on t h e v e s s e l moored i n a s o f t system.
The mean and low f requency wave d r i f t f o r c e was found from t h e mooring f o r c e measure- ments ( s e e F igu re 4 ) . Due t o t h e mooring system t h e measured low frequency f o r c e w i l l t e n d t o s u f f e r from magn i f i ca t ion e f f e c t s a s t h e frequency of i n t e r e s t i n c r e a s e s from z e r o upward t o t h e n a t u r a l su rge f requency. For t h e p r e s e n t c a s e , low f requency d r i f t f o r c e s wi th f r e q u e n c i e s up t o 0.1 r a d . / s e c . f u l l s c a l e s u f f e r e d l e s s t h a n 6 p e r c e n t from dynamic magn i f i ca t ion e f f e c t s . T h i s means t h a t t h e low frequency components o f t h e measured mooring f o r c e could be equated t o t h e wave d r i f t f o r c e up t o a frequency of 0 .1 r ad . / s ec . f u l l s c a l e . Above t h i s f requency magni- f i c a t i o n e f f e c t s i n c r e a s e d above 6 p e r c e n t .
TEST SET-UP FOR THE MOTION TEST
The p r i n c i p l e of t h e t es t se t -up f o r t h i s test i s a l s o shown i n F igu re 4. I n t h i s ca se , however, t h e mooring s t i f f n e s s was cons ide rab ly l e s s . The n a t u r a l frequency of t h e su rge motion amounted t o 0.036 r a d . / s e c . f u l l s c a l e , which corresponds t o a n a t u r a l p e r i o d of 176 seconds. Surge motion decay t e s t s t o de termine t h e s t i l l wa te r damping c o e f f i c i e n t s b l l and b2 o f equa- t i o n (31) were a l s o c a r r i e d o u t i n t h e s o f t s p r i n g system. From t h e s e tests t h e fo l lowing v a l u e s were found:
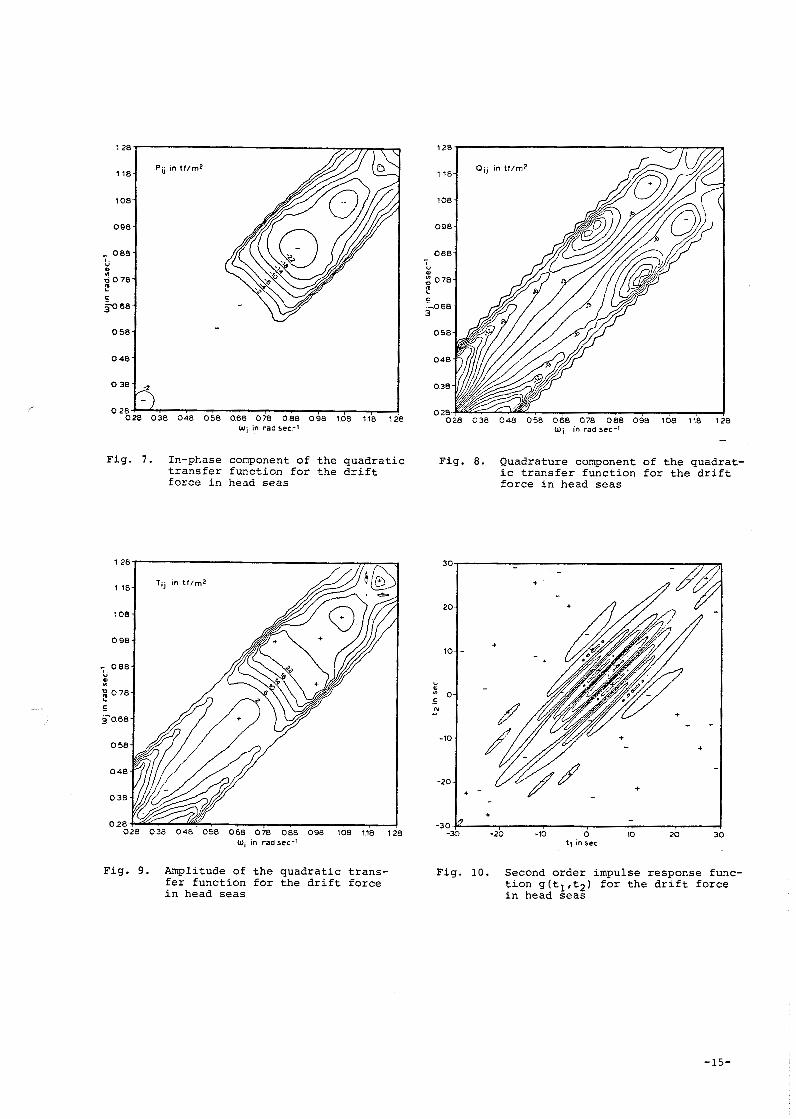
RESULTS OF COMPUTATIONS OF THE QUADRATIC TRANSFER FUNCTION AND THE SECOND ORDER IMPULSE RESPONSE FUNCTION
I n F igu re 7 and F igure 8 p l o t s a I e g iven of t h e q u a d r a t i c t r a n s f e r f u n c t i o n s P i j and Q i j r e s p e c t i v e l y of t h e d r i f t f o r c e i n head waves. The p l o t s show t h e contour l i n e s o f t h e f u n c t i o n s P and Q i j i n t h e w i , w j f requency p l ane . I n each p l o t numbers have been a s s igned t o t h e con- 3.3 t o u r s . These e x p r e s s t h e v a l u e s o f P i j and Q i i n m e t r i c tons/m2. The p l o t s on ly cover p a r t o f t h e t o t a l wi,u p l ane . For l w i - U, l > 0.24 t i e t r a n s f e r f u n c t i o n s have n o t been computed and have been set 20 ze ro . The r a p i d f a l l - o f f of t h e f u n c t i o n s a long t h e l i n e s i w i - W . l = 0.21 i s t h e r e f o r e n o t a c h a r a c t e r i s t i c of t h e f u n c t i o n s b u t due t o t r u n c a t i o n . Data f o r l a g g e r d i f f e r - ence f r e q u e n c i e s a r e n o t r e l e v a n t f o r t h e low frequency s u r g e motions. For o t h e r modes o f mo- t i o n , f o r i n s t a n c e , when low frequency v e r t i c a l motions a r e impor t an t , it may be necessa ry t o e n l a r g e t h e t r a n s f e r f u n c t i o n s t o l a r g e r d i f f e r e n c e f r equenc ie s . The f u n c t i o n P i j g iven i n Fig- u r e 7 i s symmetrical about t h e l i n e w i = wj whi l e t h e f u n c t i o n Q i j g iven i n F igu re 8 is a n t i - symmetrical about t h e l i n e wi = w j . Th i s i s i n keeping wi th equa t ions (20) and (21 ) . I n F igu re 7 t h e d a t a on t h e l i n e w i = W, cor responds wi th t h e mean d r i f t f o r c e s i n r e g u l a r waves shown i n F i g u r e 6. The n e g a t i v e s i g n o f P i n d i c a t e s t h a t t h e mean f o r c e i n head waves is d i r e c t e d a f t . I t i s noted t h a t t h e f u n c t i o n P i i j i n F igu re I g e n e r a l l y has i t s lowest va lues on t h e d i agona l W = = W,. T h i s f u n c t i o n t e n d s t o l n c r e a s e a s t h e d i f f e r e n c e f requency Iwi - w j l i s inc reased . Below a f requency o f about 0.75 r ad . / s ec . t h e r e a r e no con tour l i n e s excep t nea r t h e f requency
0.3 r ad . / s ec . A t t h i s f requency a s l i g h t "dip" i s shown i n Pi,. Th i s frequency corresponds t o t h e n a t u r a l heave and p i t c h f requency of t h e v e s s e l . I n between 0.75 r ad . / s ec . and 0.3 r ad . / s ec . t h e f u n c t i o n Pi j remains above t h e v a l u e of -2 and below zero . The f i r s t contour l i n e marks t h e -2 l e v e l , hence no contour l i n e s o f P i j a r e shown i n t h i s i n t e r v a l . The dec rease ( l a r g e r nega- t i v e v a l u e s i n d i c a t i n g t h a t t h e a f t d i r e c t e d f o r c e i s i n c r e a s i n g ) i n t h e va lue of Pi , above f r e q u e n c i e s o f abou t 0.75 r ad . / s ec . i s a s s o c i a t e d wi th i n c r e a s i n g d i f f r a c t i o n e f f e c t s . The s t r u c - t u r e becomes l a r g e r e l a t i v e t o t h e wave l e n g t h and more wave energy i s r e f l e c t e d back. The peaks and t roughs shown i n F igu re '7 a r e due t o changing i n t e r a c t i o n e f f e c t s occur r ing between t h e s i x columns of t h e semi-submersible. T h i s is a l s o r e f l e c t e d i n F igu re 6 , i n which t h e mean d r i f t f o r c e i n r e g u l a r waves i s shown. The r e s u l t s i n t h i s f i g u r e correspond t o t h e va lues on t h e d i - agonal o f F igu re 7.
As i n d i c a t e d p r e v i o u s l y , t h e f u n c t i o n Q i . shown i n F igu re 8 is anti-symmetric about t h e d i agona l . On t h e d i agona l t h e v a l u e s a r e zero . i s one moves f u r t h e r away from t h e d i agona l t h e v a l u e s , i n a b s o l u t e sense , i n c r e a s e . For low v a l u e s o f w i and w j , Q i j i n c r e a s e s more r a p i d l y a s / m i - w j I t n c r e a s e s . Th i s i s due t o c o n t r i b u t i o n V t o t h e d r i f t f o r c e which i s g iven i n equa t ion ( 7 ) . F o r h i g h e r va lues of w i and w j , Q i j shows peaks and t roughs which a r e again a s s o c i a t e d wi th d i f f r a c t i o n and i n t e r a c t i o n e f f e c t s between columns of t h e semi-submersible. For I w i - u . l > 0.24, Qi j f a l l s o f f r a p i d l y . T h i s i s aga in due t o t r u n c a t i o n . 3
I n F igu re 9 t h e ampl i tude Tij o f t h e wave d r i f t f o r c e t r a n s f e r f u n c t i o n i s given. T h i s i s d e f i n e d by:
By d e f i n i t i o n T i j i s symmetric about t h e d i agona l . I n s p e c t i o n of T i i n comparison wi th P i j and Qi, shows t h a t f o r h i g h e r v a l u e s o f o i and u, t h e ampl i tude T i . i s dominated by t h e in-phase . For lower v a l u e s o f w i and w j , t h e quadra tu re p a r t hi i s dominant. Fo r f requency ::;:eziareater t h a n about 0.75 rad . /sec. , T i v a l u e s dec rease r a p i d l y . Between 0.75 r ad . / s ec . and 0.91 rad . / sec . t h e con tour s of Ti, t e n d 20 run a t r i g h t - a n g l e s t o t h e d i agona l w i = o j f o r /toi - w j l v a l u e s o f up t o abou t 0 .1 r ad . / s ec . T h i s type of behaviour t e n d s t o f avour t h e use o f approximate methods f o r computing d r i f t f o r c e s i n i r r e g u l a r waves a s , f o r i n s t a n c e , g iven by P i n k s t e r [12 ] . Th i s i s because i n such c a s e s t h e o f f -d i agona l v a l u e s o f Ti , can be r e p l a c e d by t h e va lue on t h e d i agona l Tnn where t h e f requency wn i s equa l t o t h e mean of t h e f r e q u e n c i e s w i and U,. For lower v a l u e s of t h e f r e q u e n c i e s w i and w j t h e va lues o f T i j a r e changing more r ap id - l y when moving away from t h e d i agona l w i = w j . Th i s t e n d s t o make approximative methods, which a r e based on t h e d a t a on t h e d i a g o n a l o n l y , l e s s accep tab le .
F igu res 7, 8 and 9 show t h a t t h e q u a d r a t i c t r a n s f e r f u n c t i o n is a compl ica ted s u r f a c e i n t h e w i , w j p l ane . Some of i t s f e a t u r e s a r e r e a d i l y a s s o c i a t e d w i t h known p h y s i c a l e f f e c t s . A f u l l unders tanding o f t h e q u a d r a t i c t r a n s f e r f u n c t i o n w i l l r e q u i r e more s y s t e m a t i c computa- t i o n s .
I n F igu re 10, t h e second o r d e r impulse response f u n c t i o n g ( 2 ) (tl,t2) computed acco rd ing t o equa t ion (23) i s shown. The f u n c t i o n g ( 2 ) ( t l , t 2 ) i s shown f o r tl and t 2 va lues from -30 sec. t o +30 sec . T h i s is only p a r t of t h e complete f u n c t i o n which was CO t e d f o r tl and t 2 from -78 s e c . t o +78 sec . w i th a sample t ime o f 1.14 sec . The f u n c t i o n g T 3 y ( t l , t 2 ) i s r e a l and sym- m e t r i c a l about t h e d i agona l t l = t 2 . It reaches i t s l a r g e t va ues , i n a b s o l u t e sense , on t h e d i agona l . The l a r g e s t va lue on t h e d i agona l is -0.48 t f .mS/sec t f o r tl = t 2 = 6.8 s e c . The con- t o u r s o f t h e f u n c t i o n g e n e r a l l y run p a r a l l e l t o t h e d i agona l i n d i c a t i n a s t r o n g dependence on t h e t ime d i f f e r e n c e tl - t 2 . As we move away from t h e d i agona l , g ( 2 y 1 t l , t 2 ) o s c i l l a t e s i n s i g n and decays. The same behaviour was a l s o found by D a l z e l l [ l 1 1 when s tudy ing t h e q u a d r a t i c impulse response f u n c t i o n f o r t h e added r e s i s t a n c e o f a v e s s e l t r a v e l l i n g i n head waves.
The f u n c t i o n g ( 2 ) ( t l , t 2 ) is t o o compl ica ted t o be a b l e t o i d e n t i f y any p a r t i c u l a r phys- i c a l phenomena a s having i n f l u e n c e on a p a r t i c u l a r f e a t u r e o f t h e func t ion . Again, s y s t e m a t i c computations i n which, f o r i n s t a n c e , t h e geometry o f a p l a t f o r m i s changed, can be used t o g e t a b e t t e r f e e l f o r t h e s i g n i f i c a n c e o f such d a t a .
RESULTS OF TIME DOMAIN COMPUTATIONS OF THE DRIFT FORCE
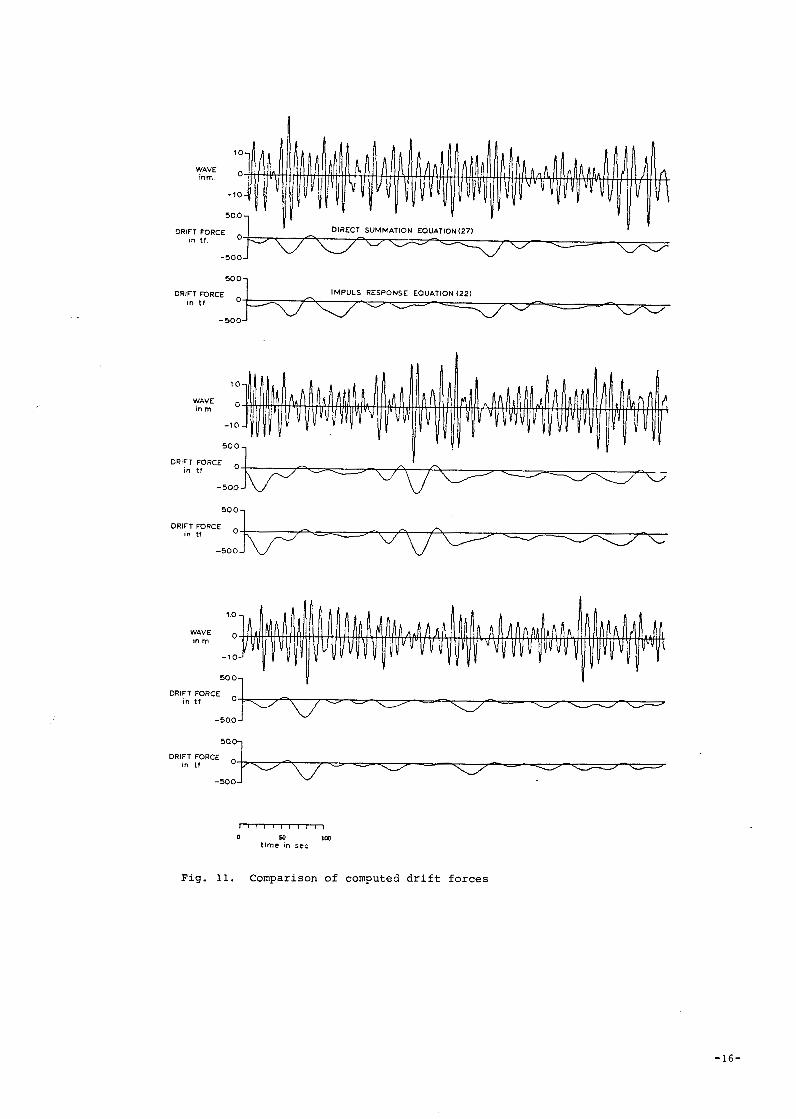
I n o r d e r t o v e r i f y t h a t t h e wave d r i f t f o r c e i n i r r e g u l a r waves i s computed c o r r e c t l y u s i n g t h e q u a d r a t i c t r a n s f e r f u n c t i o n and e q u a t i o n ( 2 2 ) , t h e r e s u l t s ob ta ined i n t h i s way a r e compared wi th r e s u l t s o b t a i n e d by a p p l i c a t i o n o f t h e d i r e c t summation t echn ique g iven by equa t ion (27) . To t h i s end a wave t r a i n corresponding t o t h e wave spect rum i n F igu re 3 was gene ra t ed based on equa t ion (9 ) u s i n g 600 e q u i d i s t a n t f requency components. For t h i s wave t r a i n t h e " t r u e " wave d r i f t f o r c e s i g n a l i s o b t a i n e d from equa t ion (2'7) u s i n g d a t a on Pij and Q i j shown i n F i g u r e s 7 and 8. The wave d r i f t f o r c e s i g n a l was a l s o computed u s i n g t h e second o r d e r impulse r e sponse f u n c t i o n g ( 2 ) ( t l , t2) and e q u a t i o n ( 2 2 ) . The r e s u l t s a r e compared i n F igu re 11. I t can b e seen t h a t t h e agreement between t h e two methods i s e x c e l l e n t , t h u s g i v i n g conf idence i n t h e app l i ca - b i l i t y of equa t ion (22) t o a r b i t r a r y measured wave r eco rds .
COMPARISON OF MEASURED AND COMPUTED DRIFT FORCES
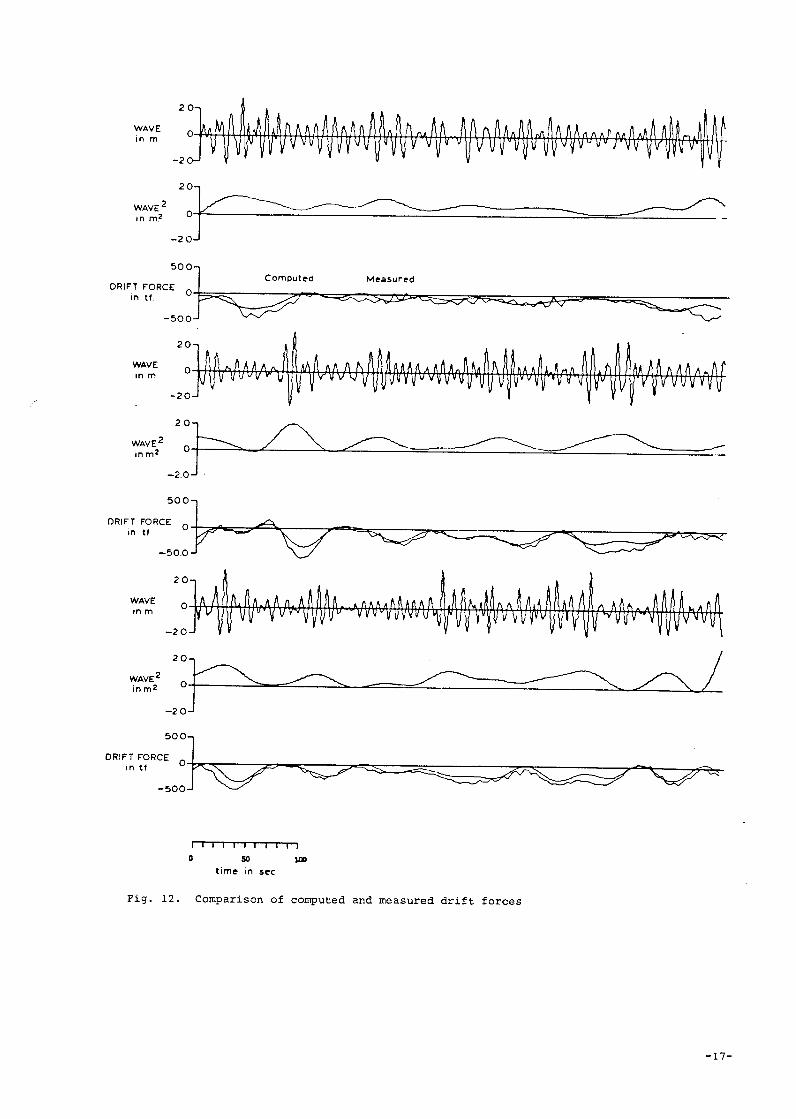
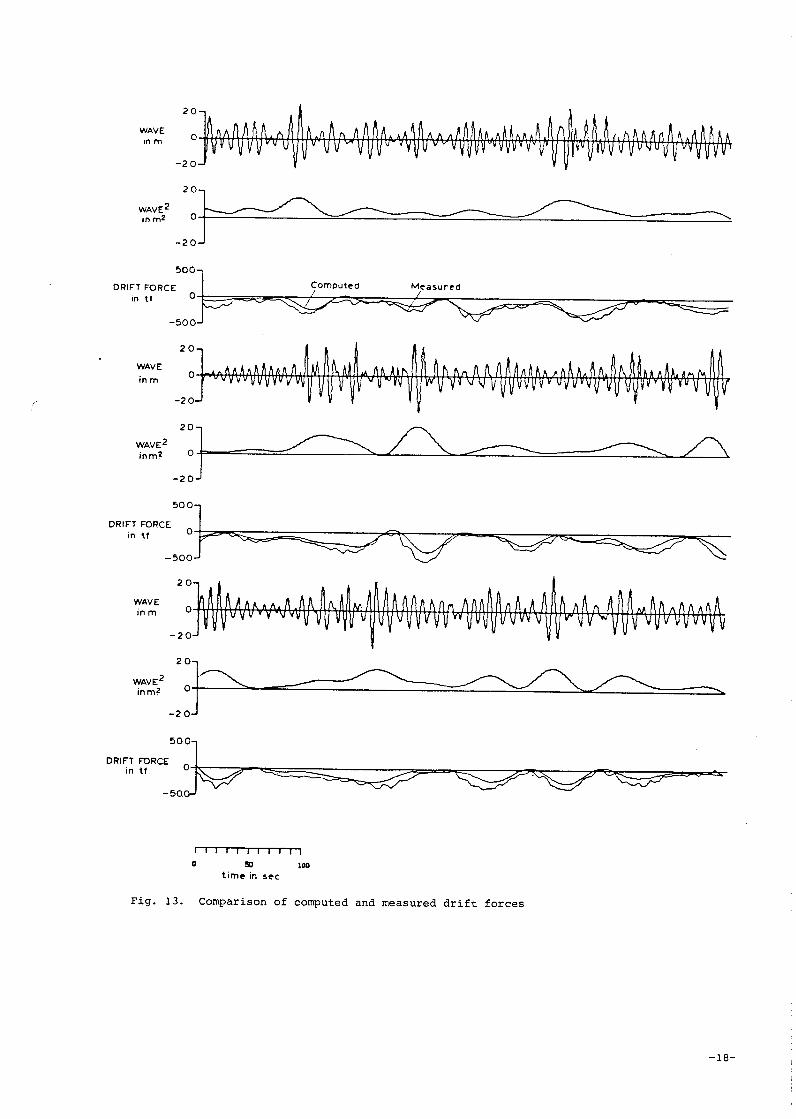
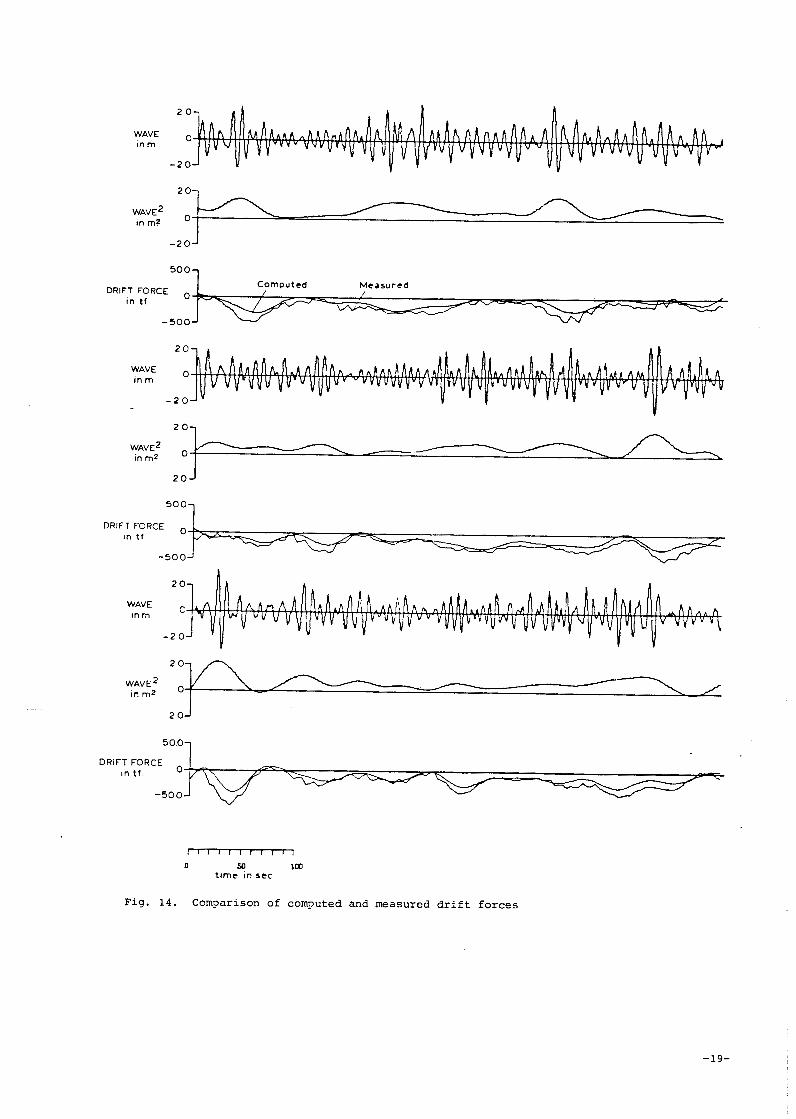
In Figures 12, 13 and 1 4 time records of t h e measured and computed low frequency surge d r i f t f o r c e i n i r r e g u l a r waves a r e given. In these f i g u r e s t h e record of t h e waves and t h e low frequency p a r t of t h e square of the wave e leva t ion a r e a l s o given. A l l records , except f o r t h e wave record , have been low-pass f i l t e r e d s o a s t o e l imina te f requencies higher than about 0.1 rad. /sec . f u l l sca le . The measured fo rce record s t i l l con ta ins some higher frequency components. This is due t o the s t i f f mooring system used f o r t h i s t e s t , which r e s u l t e d i n l a r g e wave f r e - quency fo rce components. A s was shown previously , those d id n o t in f luence t h e wave frequency motions s i g n i f i c a n t l y . The record of t h e low-pass f i l t e r e d square of the wave e l e v a t i o n i s in - cluded t o show the c l e a r r e l a t i o n s h i p between t h e f o r c e and t h i s quan t i ty . The computed record i s based upon the measured wave record and equation (22) .
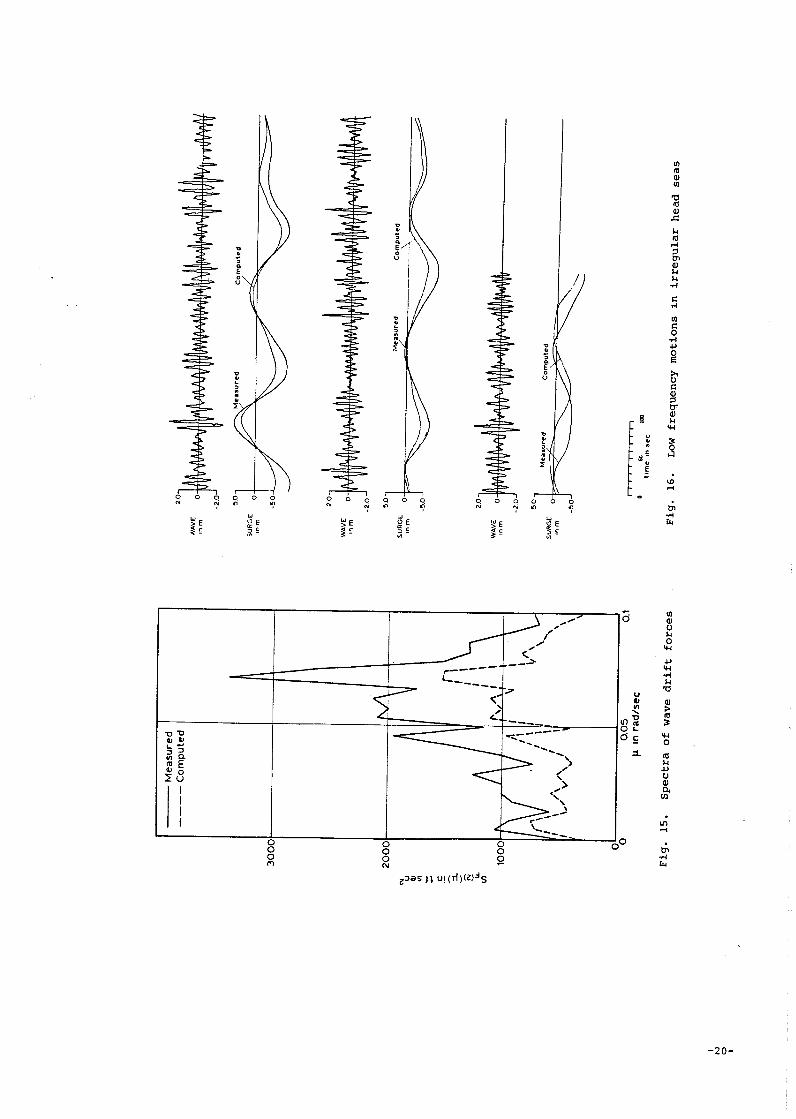
I n Figure 15 the s p e c t r a l dens i ty of the measured and computed wave d r i f t f o r c e records a r e shown up t o a frequency of 0.1 rad. /sec . f u l l sca le . The s p e c t r a l d e n s i t i e s were computed based on a record l eng th of 6 hours f u l l s c a l e us ing t h e au to -cor re la t ion func t ion method. The sample per iod was 3.79 seconds and 200 l a g s were used t o compute t h e au to -cor re la t ion funct ions . No smoothing was applied.
From t h e comparison it can be concluded t h a t t h e computed wave d r i f t f o r c e record i s i n good q u a l i t a t i v e agreement with t h e measured f o r c e record. The s p e c t r a l d e n s i t i e s of both rec- o rds given i n Figure 15 a r e very s i m i l a r i n form only, t h e magnitude is somewhat d i f f e r e n t . I n genera l it appears t h a t the computations underestimate t h e wave d r i f t fo rce both i n t h e mean value and i n t h e amplitude of t h e slowly varying components by 30 t o 40 p e r cent . The good agree- ment between t h e d i r e c t summation technique and t h e second o r d e r impulse response technique ( see Figure 11) i n d i c a t e s t h a t i n t h i s case , t h e cause of t h e d i f f e r e n c e s may l i e i n inaccura- c i e s i n t h e f o r c e measurements, inaccurac ies i n t h e computation of t h e q u a d r a t i c t r a n s f e r func- t i o n s o r be caused by phys ica l e f f e c t s n o t taken i n t o account i n t h e computations such a s f o r c e s of v iscous o r i g i n . This w i l l be a s u b j e c t f o r f u r t h e r r esea rch and no d e f i n i t e conclusions can be drawn a t t h i s time.
COMPARISON OF COMPUTED AND MEASURED LOW FREQUENCY SURGE MOTIONS
I n Figure 16 r e s u l t s a r e given of the computed and measured low frequency surge motions of t h e semi-submersible. The computed surge motions were determined based on equat ion (31) using t h e computed wave d r i f t fo rce s i g n a l . Also shown i n t h e f i g u r e i s t h e measured wave e l e v a t i o n . The d u r a t i o n of t h e motion t e s t corresponded t o 30 minutes f u l l s c a l e . The t r a n s i e n t components i n t h e computed surge t ake about 10 minutes t o d i e o u t , t h u s l eav ing about 20 minutes f o r t h e com- par i son . The comparison shows t h a t t h e computed surge record corresponds q u i t e w e l l wi th the mea- su red record with respec t t o t h e phase of t h e motion and the genera l f e a t u r e s of t h e record. The amplitudes of t h e computed record a r e , however, somewhat lower than t h e measured values . This i s i n agreement with t h e previously found d i f f e r e n c e s between t h e measured and computed low frequency d r i f t fo rces .
CONCLUSIONS
In t h i s paper a genera l method t o determine t h e low frequency wave d r i f t fo rces on a v e s s e l f l o a t i n g i n i r r e g u l a r waves has been descr ibed. Appl icat ion of t h i s method t o t h e case of a s i x column semi-submersible and comparison of r e s u l t s of time domain computations of wave d r i f t f o r c e s and low frequency motions wi th r e s u l t s of model t e s t s has shown t h a t , i n a qua l i - t a t i v e sense , both t h e wave d r i f t f o r c e s and t h e low frequency motions a r e w e l l p r e d i c t e d by computations. The computed d r i f t f o r c e s , however, f a l l below t h e measured d r i f t f o r c e s by some 30 t o 40 pe r cent . Using t h e computed d r i f t f o r c e s , t i m e domain s imula t ions of t h e low frequency h o r i z o n t a l motions show t h e same order of d i f f e r e n c e s compared t o r e s u l t s of measurements.
More i n v e s t i g a t i o n s w i l l be c a r r i e d out t o determine t h e phenomena which may e f f e c t t h e d i f f e r e n c e s . The computations of wave d r i f t f o r c e s have been based on p o t e n t i a l theory. Resu l t s given i n t h i s paper i n d i c a t e t h a t , al though d i f f e r e n c e s e x i s t between r e s u l t s of measurements and computations, f o r t h i s case a t l e a s t , t h e low frequency wave d r i f t fo rces a c t i n g on t h e semi-submersible a r e dominated by p o t e n t i a l e f f e c t s .
REFERENCES
l. Hooft, J.P., 1972, Hydrodynamic aspec t s of semi-submersible pla t forms, Netherlands Ship Model Basin, Pub l ica t ion No. 400.
2. Wahab, R . , 1974, Wave induced motions and d r i f t f o r c e s on a f l o a t i n g s t r u c t u r e , Nether- lands Ship Research Centre, TNO, D e l f t , Report No. 1865.
3. P i j f e r s , J . G . L . and Brink, A.W., 1977 , "Calculated d r i f t f o r c e s of two semi-submersible pla t form types i n r e g u l a r and i r r e g u l a r waves", Offshore Technology Conference, Houston,
P a p e r No. 2977.
F e r r e t t i , C. and B e r t a , N . , 1980, "Viscous e f f e c t c o n t r i b u t i o n t o t h e d r i f t f o r c e s on a f l o a t i n g s t r u c t u r e " , I n t e r n a t i o n a l Symposium on Ocean E n g i n e e r i n g and S h i ~ h a n d l i n q , Gothenburg , 1980.
Karppinen , T.1 1979, An a p p r o a c h t o computing t h e s e c o n d o r d e r s t e a d y f o r c e s o n semi- s u b m e r s i b l e s t r u c t u r e s , H e l s i n k i U n i v e r s i t y o f Technology , S h i p Hydrodynamics L a b o r a t o r y , R e p o r t No. 16 .
P i n k s t e r , J.A. and Van O o r t m e r s s e n , G . , 1977, "Computat ion o f t h e f i r s t and s e c o n d o r d e r wave f o r c e s on b o d i e s o s c i l l a t i n g i n r e g u l a r waves", P r o c e e d i n g s Second I n t e r n a t i o n a l Conference on Numer ica l S h i p Hydrodynamics, B e r k e l y , 1977.
P i n k s t e r , J .A. , 1980, Low f r e q u e n c y s e c o n d o r d e r wave e x c i t i n g f o r c e s on f l o a t i n g s t r u c - t u r e s , N e t h e r l a n d s S h i p Model B a s i n , P u b l i c a t i o n No. 650.
D a l z e l l , J .F. , 1976, " A p p l i c a t i o n o f t h e f u n d a m e n t a l p o l y n o m i a l model t o t h e s h i p added r e s i s t a n c e problem", E l e v e n t h Symposium on Naval Hydrodynamics, U n i v e r s i t y C o l l e g e , London, 1976.
B o r e e l , L . J . , 1974, "Wave a c t i o n on l a r g e o f f s h o r e s t r u c t u r e s " , Conference on O f f s h o r e S t r u c t u r e s , I n s t i t u t e o f C i v i l E n g i n e e r s , London.
Van Oor tmerssen , G . , 1976, The m o t i o n s o f a moored s h i p i n waves, N e t h e r l a n d s S h i p Model B a s i n , P u b l i c a t i o n No. 510.
D a l z e l l , J .F. , 1975, The a p p l i c a b i l i t y o f t h e f u n c t i o n a l p o l y n o m i a l i n p u t - o u t p u t model t o s h i p r e s i s t a n c e i n waves , S t e v e n s I n s t i t u t e o f Technology, Davidson L a b o r a t o r y , R e p o r t SIT-DL-75-1794.
P i n k s t e r , J .A. , 1974 , "Low f r e q u e n c y phenomena a s s o c i a t e d w i t h v e s s e l s moored a t s e a " , European S p r i n g Meet ing o f SPE-AIME, Amsterdam, P a p e r SPE 483'7.
TABLE I
MAIN PARTICULARS OF SEMI-SUBMERSIBLE
D e s i g n a t i o n
Length be tween p e r p e n d i c u l a r s
B r e a d t h
Draught
D i s p l a c e m e n t volume
Water d e p t h
Symbol
L~~
B
T
V
Wd
U n i t
m
m
m
m 3-
m
V a l u e
100.00
76.00
20.00
35,925
40.00
SEMI - SUBMERSIBLE
Fig. 1. Layout of the semi-submersible
FACET X H E M A T I S A T I O H SEMI-SUBMERSIBLE
TOTAL 216 FACETS
WATER LINE SCHEMATISATION
TOTAL 72 ELEMENTS
Fig. 2. Facet schematisation
W in rad sec-'
Fig. 3. The wave spectrum Fig. 4. Mooring system
- - --
FORCE TRANSDUCER -
l0 0 0 1
- FREE-FLOATING D IN STIFF MOORING SYSTEM
w in rad sec -'
Fig. 5. In f luence of mooring system s t i f f n e s s on f i r s t o rde r motions
FREE FLOATING 0 IN STIFF MOORING SYSTEM I-
U in rad sec:'
Fig. 6 . Inf luence of mooring system s t i f f n e s s on mean d r i f t f o r c e s
W i in rad sec-' W i in rad sec-'
Fig. '7. In-phase component of t h e q u a d r a t i c Fig. 8. Quadrature component of t h e quadrat- t r a n s f e r funct ion f o r t h e d r i f t i c t r a n s f e r func t ion f o r t h e d r i f t fo rce i n head s e a s f o r c e i n head s e a s
W, In rad sec-'
+ -30 ,
- -30 -20 -10 0
I 10 20 30
11 In sec
Fig. 9. Amplitude of t h e quadra t i c t r a n s - Fig. 10. Second o rder impulse response func- f e r funct ion f o r the d r i f t f o r c e t i o n g ( t l , t 2 ) f o r t h e d r i f t fo rce i n head seas i n head seas
DRIFT FORCE IMPULS RESPONSE EQUATION 122) in t f
- 5 0 0 -
1 0
WAVE In m
-1 0
5 0 0
DRIFT FORCE In t f
- 5 0 0
5 0 0 -
DRIFT FORCE In tf L
-500-2
DRIFT FORCE In t f /'
- V
-500- '
DRIFT FORCE ~n tf /v - -
-500- - 0 %l im
t i m e tn sec
F ig. 11. Comparison of computed d r i f t forces
WAVE in m
50 0- Computed Measured
DRIFT FORCE - in tf
-500-
2 0
WAVE tn m
-20-1 ' V ' - ' V
DRIFT FORCE A
in t f A
-50 0-
2 0
WAVE in m
-2oJ Y Y - ' T l
DRIFT FORCE in t f
-
-500-
- 0 SO
t ime in sec
Fig. 12. Comparison of computed and measured drift forces
2 0
WAVE
-2 0
DRIFT FORCE In t t 0
-500-
DRIFT FORCE ~n 11
2 0
WAVE in m 0
-20
Computed Measured
0- e'
2 o-l
-500-
500-
DRIFT FORCE In t t
- 5QO-
0 S 100
t ime in sec
Fig. 13. Comparison of computed and measured d r i f t forces
2 0
WAVE In m
- 2 0 I ' v Y
DRIFT FORCE Computed Measured
in t t /
-500-
2 0
WAVE In m
- 2 0 I
0 5D lrn t tme In sec
Fig. 14. Comparison of computed and measured drift forces