C C O O R R N N E E L L L L U N I V E R S I T Y 1 MAE 4700 – FE Analysis for Mechanical & Aerospace Design N. Zabaras (9/23/2009) MAE4700/5700 Finite Element Analysis for Mechanical and Aerospace Design Cornell University, Fall 2009 Nicholas Zabaras Materials Process Design and Control Laboratory Sibley School of Mechanical and Aerospace Engineering 101 Rhodes Hall Cornell University Ithaca, NY 14853-3801
Transcript
CCOORRNNEELLLL U N I V E R S I T Y 1
MAE 4700 – FE Analysis for Mechanical & Aerospace DesignN. Zabaras (9/23/2009)
MAE4700/5700Finite Element Analysis for
Mechanical and Aerospace Design
Cornell University, Fall 2009
Nicholas ZabarasMaterials Process Design and Control Laboratory
Sibley School of Mechanical and Aerospace Engineering101 Rhodes Hall
MAE 4700 – FE Analysis for Mechanical & Aerospace DesignN. Zabaras (9/23/2009)
Finite element basis functions in 1D• The domain is divided into finite elements and the
weight functions and trial solutions are constructed within each element.
• These functions have to be chosen so that the FEM converges, i.e. as element size, denoted by h, decreases, the solution tends to the correct solution (mesh refinement).
• Convergence of the FEM requires basis functions that satisfy continuity and completeness.
CCOORRNNEELLLL U N I V E R S I T Y 3
MAE 4700 – FE Analysis for Mechanical & Aerospace DesignN. Zabaras (9/23/2009)
Continuity and completeness• Continuity: the trial solutions and weight functions need to
be sufficiently smooth. The degree of smoothness required depends on the order of the derivatives that appear in the weak form. For the 2nd order ODEs considered, the derivatives in the weak form are 1st order, thus the weight functions and trial solutions must be H1 (C0 piecewise polynomials).
• Completeness: the basis functions need to be able toapproximate a given smooth function with arbitrary accuracy. As the element size h approaches zero, the trial solutions and weight functions and their derivatives up to, and including the highest-order derivative appearing in the weak form, must be capable of assuming constant values
finite elements can represent rigid body motion and constant strain states exactly
CCOORRNNEELLLL U N I V E R S I T Y 4
MAE 4700 – FE Analysis for Mechanical & Aerospace DesignN. Zabaras (9/23/2009)
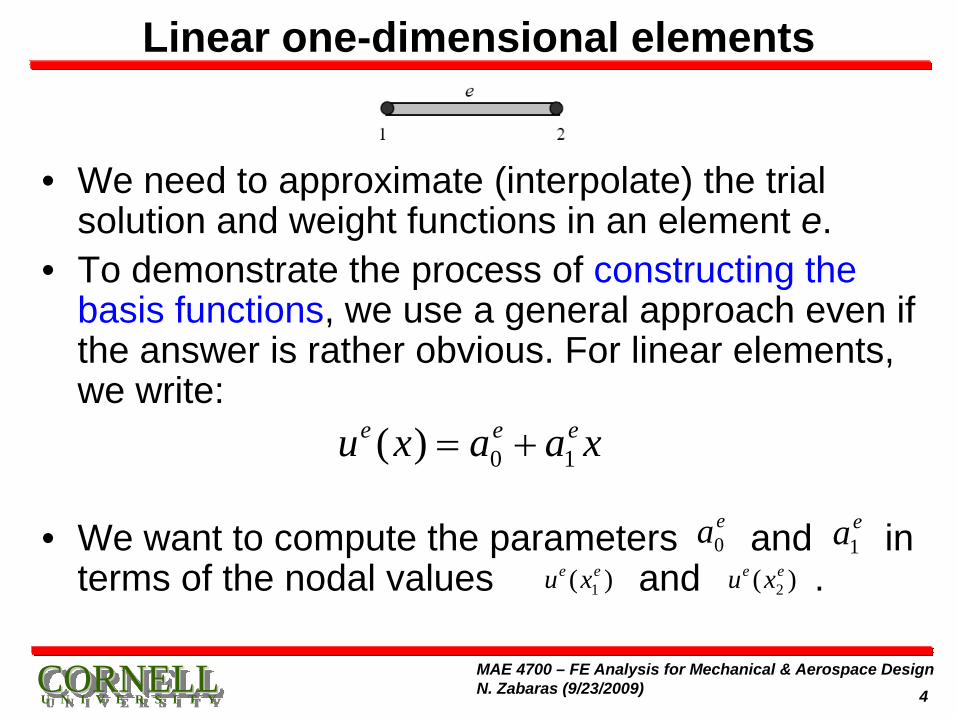
Linear one-dimensional elements
• We need to approximate (interpolate) the trial solution and weight functions in an element e.
• To demonstrate the process of constructing the basis functions, we use a general approach even if the answer is rather obvious. For linear elements, we write:
• We want to compute the parameters and in terms of the nodal values and .
0 1( )e e eu x a a x= +
0ea 1
ea1( )e eu x 2( )e eu x
CCOORRNNEELLLL U N I V E R S I T Y 5
MAE 4700 – FE Analysis for Mechanical & Aerospace DesignN. Zabaras (9/23/2009)
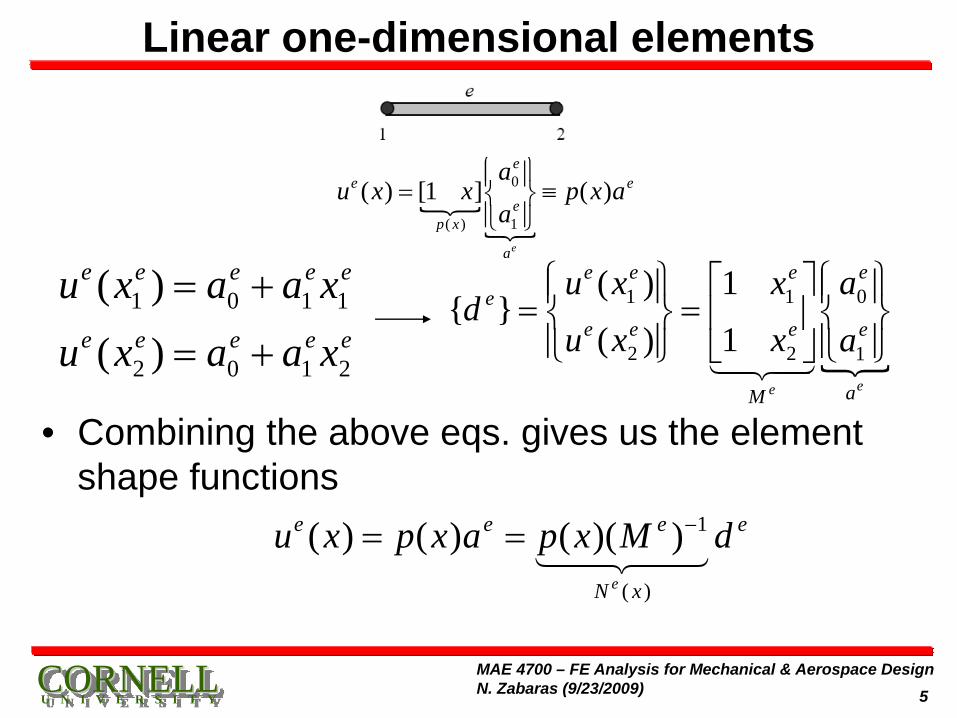
Linear one-dimensional elements
• Combining the above eqs. gives us the element shape functions
0
( ) 1
( ) [1 ] ( )
e
ee e
ep x
a
au x x p x a
a
⎧ ⎫⎪ ⎪= ≡⎨ ⎬⎪ ⎪⎩ ⎭
1 0 1 1
2 0 1 2
( )
( )
e e e e e
e e e e e
u x a a x
u x a a x
= +
= +
01 1
2 2 1
( ) 1{ }
( ) 1ee
ee e ee
e e e e
aM
au x xd
u x x a
⎧ ⎫⎧ ⎫ ⎡ ⎤⎪ ⎪ ⎪ ⎪= =⎨ ⎬ ⎨ ⎬⎢ ⎥⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭⎣ ⎦
1
( )
( ) ( ) ( )( )e
e e e e
N x
u x p x a p x M d−= =
CCOORRNNEELLLL U N I V E R S I T Y 6
MAE 4700 – FE Analysis for Mechanical & Aerospace DesignN. Zabaras (9/23/2009)
Element shape functions
• The element shape function matrix can now be computed as:
1 2 11 2
1[ ] ( )( ) [1 ]1 1
e ee e e e
e
x xN N N p x M x
L− ⎡ ⎤−
= = = ⇒⎢ ⎥−⎣ ⎦
1
11 2 1
2
1 1( )1 11
e
e e ee
ee
M
x x xM
Lx
−
− ⎡ ⎤ ⎡ ⎤−= =⎢ ⎥ ⎢ ⎥−⎣ ⎦⎣ ⎦
11 2 2 1
1[ ] ( )( )e e e e e eeN N N p x M x x x x
L− ⎡ ⎤= = = − − ⇒⎣ ⎦
1 2
2 1
1 ( )
1 ( )
e ee
e ee
N x xL
N x xL
= −
= −
CCOORRNNEELLLL U N I V E R S I T Y 7
MAE 4700 – FE Analysis for Mechanical & Aerospace DesignN. Zabaras (9/23/2009)
Two-node linear element: Shape functions
• Verify that (as desired) the following holds:
• The interpolation property is now summarized as:
1 2
2 1
1 ( )
1 ( )
e ee
e ee
N x xL
N x xL
= −
= −
( )e ei j ijN x δ=
11 2 1 1 2 2
2
( ) ( ) [ ]e
e e e e e e e e ee
du x N x d N N N d N d
d
⎧ ⎫⎪ ⎪= = = + ⇒⎨ ⎬⎪ ⎪⎩ ⎭
1 1 2 22
1
( )e e e e e
e ei i
i
u x N d N d
N d=
= +
= ∑
Note:1 1 1 1 2 1 2 1 2 1
2 1 2 1 2 2 2 1 2 2
( ) ( ) ( ) 1 0
( ) ( ) ( ) 0 1
e e e e e e e e e e e
e e e e e e e e e e e
u x N x d N x d d d d
u x N x d N x d d d d
= + = + =
= + = + =
CCOORRNNEELLLL U N I V E R S I T Y 8
MAE 4700 – FE Analysis for Mechanical & Aerospace DesignN. Zabaras (9/23/2009)
Two-node linear element: Shape functions
• The derivative of can now be approximated as:
1 21 2
( ) ( ) e ee ee e edN dNdu x dN x d d d
dx dx dx dx= = +
1 2
2 1
1 ( )
1 ( )
e ee
e ee
N x xL
N x xL
= −
= −
From which we can write:
( )eu x
{ }1
2
( ) 1 1[ ]
e
eee e
e e e
B
ddu x B ddx L L d
⎧ ⎫⎪ ⎪= − =⎨ ⎬⎪ ⎪⎩ ⎭
CCOORRNNEELLLL U N I V E R S I T Y 9
MAE 4700 – FE Analysis for Mechanical & Aerospace DesignN. Zabaras (9/23/2009)
Three node element: quadratic interpolation
• We can repeat the same process as for the 2-node element to derive the shape functions for the 3-node element.
• However, we can use Lagrange interpolants to find out directly the shape functions using simple arguments.
• Lets derive . It’s a quadratic function, and it needs to be zero at nodes and . So it needs to be of the form: . It also needs to take a value of 1 at node . We finally arrive at:
1eN
2ex 3
ex 2 3( )( )e ex x x x− −∼1ex
2 31
1 2 1 3
( )( )( )( )
e ee
e e e e
x x x xNx x x x− −
=− −
CCOORRNNEELLLL U N I V E R S I T Y 10
MAE 4700 – FE Analysis for Mechanical & Aerospace DesignN. Zabaras (9/23/2009)
3-node (quadratic) and 4-node (cubic) elements
• We can generalize this process to higher order interpolation. For cubic interpolation, we need 4 nodes.
2 31
1 2 1 3
1 32
2 1 2 3
1 23
3 1 3 2
( )( )( )( )
( )( )( )( )
( )( )( )( )
e ee
e e e e
e ee
e e e e
e ee
e e e e
x x x xNx x x x
x x x xNx x x x
x x x xNx x x x
− −=
− −
− −=
− −
− −=
− −
2 3 41
1 2 1 3 1 4
1 3 42
2 1 2 3 2 4
1 2 43
3 1 3 2 3 4
1 2 34
4 1 4 2
( )( )( )( )( )( )
( )( )( )( )( )( )
( )( )( )( )( )( )
( )( )( )( )( )(
e e ee
e e e e e e
e e ee
e e e e e e
e e ee
e e e e e e
e e ee
e e e e
x x x x x xNx x x x x x
x x x x x xNx x x x x x
x x x x x xNx x x x x x
x x x x x xNx x x x
− − −=
− − −
− − −=
− − −
− − −=
− − −
− − −=
− − 4 3 )e ex x−
CCOORRNNEELLLL U N I V E R S I T Y 11
MAE 4700 – FE Analysis for Mechanical & Aerospace DesignN. Zabaras (9/23/2009)
Master elements in natural coordinate• It is more common to define the shape functions on a
master element in coordinate with .• For linear elements, we can then easily map to real
coordinate x for each element e with the isoparametric transformation (the same interpolation we used for u(x)):
ξ
1 1ξ− ≤ ≤
{ }1 2
11 2 1 1 2 1 2
2
1 1 1( )(1 )2 2 2
e e
ee e e e e e e e e
e
N N
xx x x x x x N N N x
xξ ξξ
⎧ ⎫− + ⎡ ⎤ ⎡ ⎤= + − + = + = =⎨ ⎬⎣ ⎦ ⎣ ⎦⎩ ⎭
1
2
1 (1 )21 (1 )2
e
e
N
N
ξ
ξ
= −
= +
ξ
CCOORRNNEELLLL U N I V E R S I T Y 12
MAE 4700 – FE Analysis for Mechanical & Aerospace DesignN. Zabaras (9/23/2009)
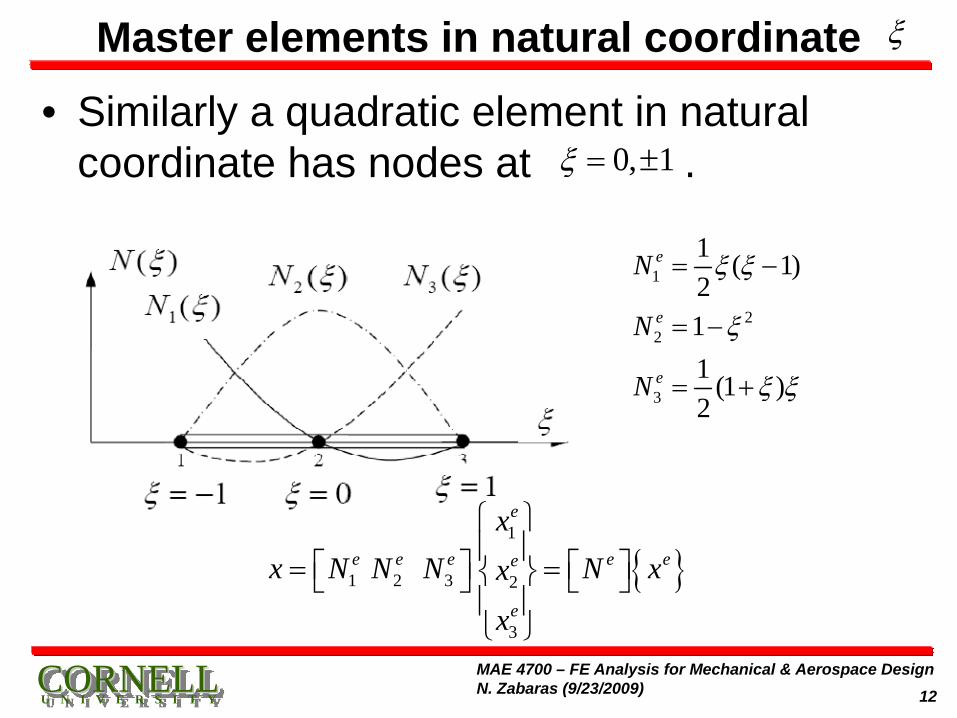
Master elements in natural coordinate
• Similarly a quadratic element in natural coordinate has nodes at .
ξ
0, 1ξ = ±
1
22
3
1 ( 1)211 (1 )2
e
e
e
N
N
N
ξ ξ
ξ
ξ ξ
= −
= −
= +
{ }1
1 2 3 2
3
e
e e e e ee
e
xx N N N N xx
x
⎧ ⎫⎪ ⎪⎡ ⎤ ⎡ ⎤= =⎨ ⎬⎣ ⎦ ⎣ ⎦⎪ ⎪⎩ ⎭
CCOORRNNEELLLL U N I V E R S I T Y 13
MAE 4700 – FE Analysis for Mechanical & Aerospace DesignN. Zabaras (9/23/2009)
Global and element shape functions• In an earlier lecture, we introduced the transformation
from elemental to global degrees of freedom:
• By assembling the local element approximations, we can compute our global finite element approximation:
• N are our global shape functions. We can rewrite the global approximation as:
{ } [ ]{ }e ed L d=
( ) [ ]{ } [ ][ ]{ }h e e e e
e e
N
u x N d N L d= =∑ ∑
1
( ) [ ]{ }nodesN
hi i
i
u x N d N d=
= = ∑Number of nodes
in the mesh
Global shapefunctions (row matrix)
CCOORRNNEELLLL U N I V E R S I T Y 14
MAE 4700 – FE Analysis for Mechanical & Aerospace DesignN. Zabaras (9/23/2009)
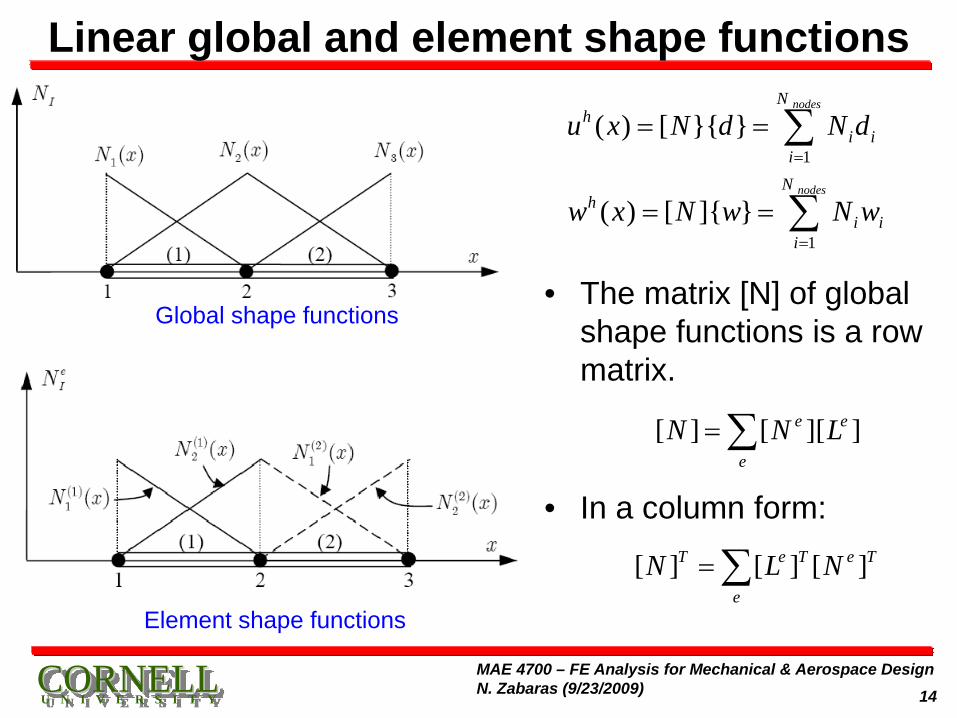
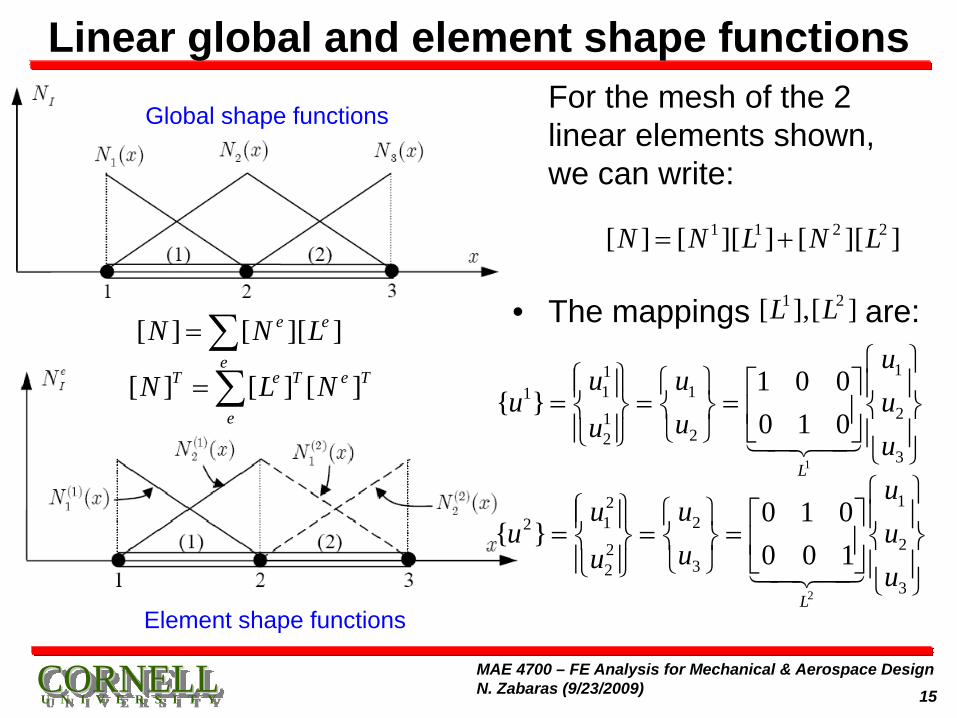
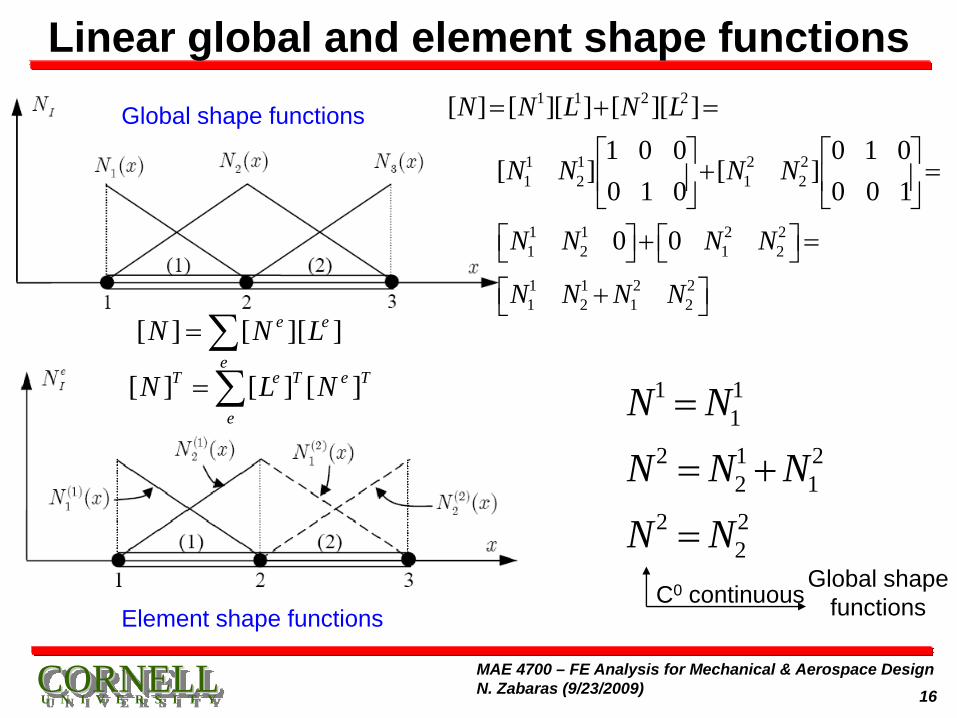
Linear global and element shape functions
• The matrix [N] of global shape functions is a row matrix.
• In a column form:
[ ] [ ][ ]e e
e
N N L=∑
1
1
( ) [ }{ }
( ) [ ]{ }
nodes
nodes
Nh
i ii
Nh
i ii
u x N d N d
w x N w N w
=
=
= =
= =
∑
∑
[ ] [ ] [ ]T e T e T
e
N L N=∑
Global shape functions
Element shape functions
CCOORRNNEELLLL U N I V E R S I T Y 15
MAE 4700 – FE Analysis for Mechanical & Aerospace DesignN. Zabaras (9/23/2009)
Linear global and element shape functions• For the mesh of the 2
MAE 4700 – FE Analysis for Mechanical & Aerospace DesignN. Zabaras (9/23/2009)
Gauss quadrature: Numerical integration
• are appropriate weights and are appropriate evaluation points. The selection of these is optimal in the sense that the highest possible polynomial can be integrated exactly.
• An Gauss integration formula can integrate exactly a polynomial of order
• So if you have to integrate a polynomial of order p, you need to use
int
int int
1
1 111
( ) ( ) ( ) ... ( )Gauss Po s
Gauss Po s Gauss Po s
N
i i N Ni
I f d W f W f W fξ ξ ξ ξ ξ=−
= = = + +∑∫iW iξ
intGauss Po sN
int2 1.Gauss Po sN −
int
12Gauss Po s
pN
+≥
For p=2, you need a minimum of 2 Gauss pointsFor p=3, you need a minimum of 2 Gauss points
CCOORRNNEELLLL U N I V E R S I T Y 22
MAE 4700 – FE Analysis for Mechanical & Aerospace DesignN. Zabaras (9/23/2009)
Gauss quadrature
1 0.0 2.02 1.0
3 ±0.77459666920
0.55555555560.8888888889
4 ±0.8611363116±0.3399810436
0.34785484510.6521451549
5 ±0.9061798459±0.5384693101
0.0
0.23692688510.47862867050.5688888889
intGauss Po sN ξ iW
13
±
CCOORRNNEELLLL U N I V E R S I T Y 23
MAE 4700 – FE Analysis for Mechanical & Aerospace DesignN. Zabaras (9/23/2009)