1/44 Sommaire 1) Photo non contractuelle Manipulateurs électroniques pour application mobile Type THE5 Série 2X RF 29881/09.10 Remplace: 07.08 Type 2THE5 RC 1) Type 4THE5 H 1) 2the5rc.jpg 4the5h.jpg Particularités – Spécialement conçu pour les engins mobiles – Disponibles en versions: Signal Tension, Signal PWM, CAN, Puissance – Fiabilité mécanique des pièces provenant des télécommandes hydrauliques – Multiples types de poignées ergonomiques dotées d’une variété de contacts électriques on / off ou proportionnels – Divers types de pédales – Ergonomie comparable à celle des manipulateurs hydrauliques – La conception garantit une excellente protection de l’électronique – Capteurs sans contact à effet hall Sommaire page Particularités .............................................................................. 1 Fonctionnement, coupe ............................................................. 2 4THE5, 6THE5, 8THE5, 2THE5R ....................................... 3 à 5 Codification ................................................................................ 6 Caractéristiques mécaniques .................................................... 7 Guide de Paramétrage du Logiciel ............................................ 7 Caractéristiques Signal Tension • Electriques .................................................................... 8 et 9 Caractéristiques Signal PWM • Electriques ................................................................ 10 et 11 • Logiciel ....................................................................... 12 à 16 Caractéristiques Puissance • Electriques ................................................................. 17 à 20 • Logiciel ....................................................................... 20 à 26 Caractéristiques Bus CAN • Electriques ................................................................. 27 à 29 • Logiciel ....................................................................... 30 à 37 Mesures de sécurité ................................................................ 38 Outil de configuration............................................................... 39 Affectation des broches ................................................... 40 à 44
Transcript
1/44
Sommaire
1) Photo non contractuelle
Manipulateurs électroniques pour application mobile
Type THE5
Série 2X
RF 29881/09.10Remplace: 07.08
Type 2THE5 RC 1)Type 4THE5 H 1)2the5rc.jpg4the5h.jpg
Particularités
– Spécialement conçu pour les engins mobiles– Disponibles en versions: Signal Tension, Signal PWM, CAN,
Puissance– Fiabilité mécanique des pièces provenant des
télécommandes hydrauliques– Multiples types de poignées ergonomiques dotées d’une
variété de contacts électriques on / off ou proportionnels– Divers types de pédales– Ergonomie comparable à celle des manipulateurs
hydrauliques– La conception garantit une excellente protection
de l’électronique– Capteurs sans contact à effet hall
Sommaire pageParticularités ..............................................................................1Fonctionnement, coupe .............................................................24THE5, 6THE5, 8THE5, 2THE5R .......................................3 à 5Codification ................................................................................6Caractéristiques mécaniques ....................................................7Guide de Paramétrage du Logiciel ............................................7Caractéristiques Signal Tension • Electriques ....................................................................8 et 9Caractéristiques Signal PWM • Electriques ................................................................10 et 11 • Logiciel .......................................................................12 à 16Caractéristiques Puissance • Electriques .................................................................17 à 20 • Logiciel .......................................................................20 à 26Caractéristiques Bus CAN • Electriques .................................................................27 à 29 • Logiciel .......................................................................30 à 37Mesures de sécurité ................................................................38Outil de configuration...............................................................39Affectation des broches ...................................................40 à 44
2
6
8
3
1
4
5
7
2
6
1
8
3
8
7
4
5
2/44 Bosch Rexroth AG Hydraulics THE5 RF 29881/09.10
Fonctionnement, coupe
CompositionLes manipulateurs de type THE5 se composent d’un organe de commande (pédale ou poignée) (1), d’un corps ou plaque de fixation (2) et d’un boîtier (3) contenant les capteurs sans contact et les cartes électroniques.
GénéralitésLes différents types de THE5 comportent des mécaniques et des ergonomies similaires à celles des manipulateurs hydrau-liques. Cette conception procure aux THE5 un haut niveau de robustesse. Les THE5 se différencient par les fonctions élec-troniques intégrées et la nature des signaux de sortie.La télécommande Signal Tension nécessite une alimentation régulée extérieure pour l’alimentation de ses capteurs. Il génère une consigne analogique en tension (V).Les télécommandes Signal PWM, CAN et Puissance intègrent une régulation de l’alimentation et peuvent donc être alimentées directement par la batterie du véhicule. La télécommande CAN génère périodiquement une trame sur bus CAN qui permet le dialogue avec d’autres systèmes.Les télécommandes Signal Tension, Signal PWM et CAN génèrent des signaux de faible puissance. La commande d’un axe électro-hydraulique nécessite l’adjonction extérieure d’une interface électronique de puissance.
Coupe 4THE5 Coupe 2THE5R
La télécommande Puissance délivre des courants en modula-tion de durée d’impulsion pour la commande directe de réducteurs de pression électro-hydrauliques proportionnels.Les manipulateurs équipés de microprocesseurs (Signal PWM, CAN, Puissance) disposent d’interfaces ISOK pour la communication avec un PC.
FonctionnementAu repos, la commande est maintenue en position neutre par les ressorts de rappel (8).Lorsque la commande (pédale ou poignée) (1) est inclinée, le poussoir (5) qui s’enfonce comprime le ressort de rappel (8). L’aimant (7) lié mécaniquement au poussoir (5) se déplace vers le haut ou vers le bas en suivant le sens de manœuvre de la commande. La consigne générée par le capteur (4) est proportionnelle à l’angle d’inclinaison du levier ou de la pédale.Le soufflet (6) protège les parties mécaniques des manipula-teurs contre les pollutions extérieures.
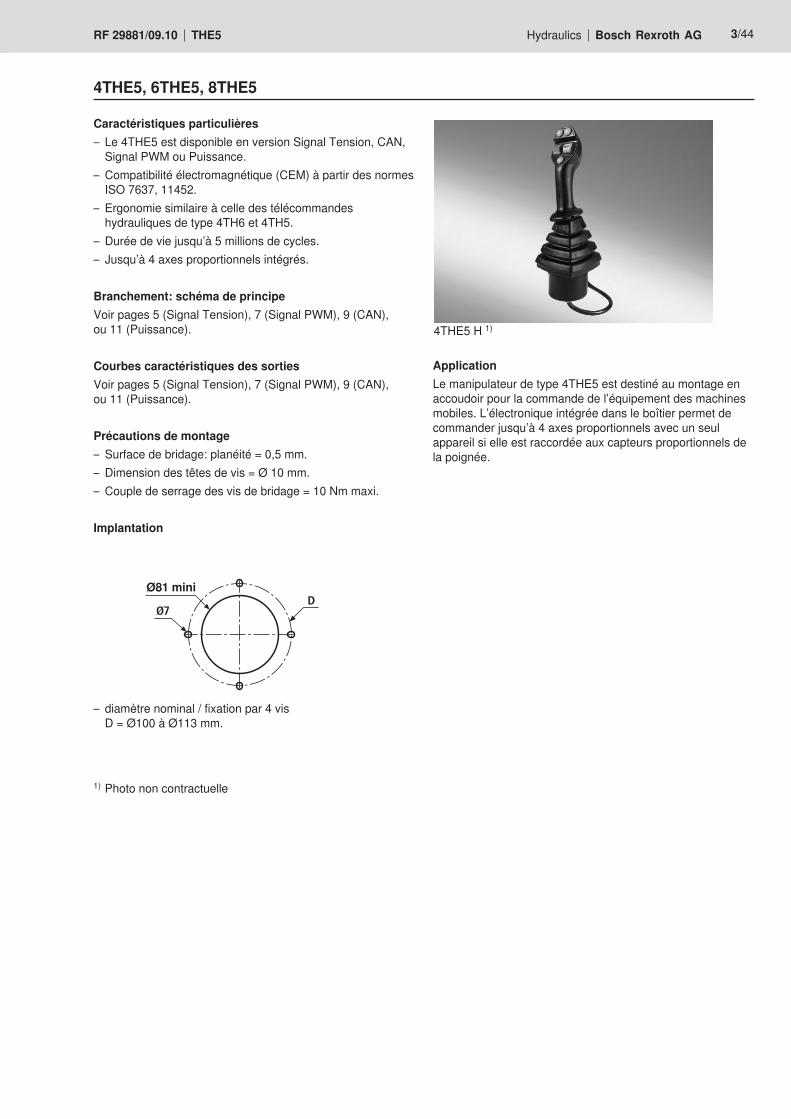
Caractéristiques particulières– Le 4THE5 est disponible en version Signal Tension, CAN,
Signal PWM ou Puissance.– Compatibilité électromagnétique (CEM) à partir des normes
ISO 7637, 11452.– Ergonomie similaire à celle des télécommandes
hydrauliques de type 4TH6 et 4TH5.– Durée de vie jusqu’à 5 millions de cycles.– Jusqu’à 4 axes proportionnels intégrés.
Branchement: schéma de principeVoir pages 5 (Signal Tension), 7 (Signal PWM), 9 (CAN), ou 11 (Puissance).
Courbes caractéristiques des sortiesVoir pages 5 (Signal Tension), 7 (Signal PWM), 9 (CAN), ou 11 (Puissance).
Précautions de montage– Surface de bridage: planéité = 0,5 mm.– Dimension des têtes de vis = Ø 10 mm.– Couple de serrage des vis de bridage = 10 Nm maxi.
Implantation
4THE5, 6THE5, 8THE5
ApplicationLe manipulateur de type 4THE5 est destiné au montage en accoudoir pour la commande de l’équipement des machines mobiles. L’électronique intégrée dans le boîtier permet de commander jusqu’à 4 axes proportionnels avec un seul appareil si elle est raccordée aux capteurs proportionnels de la poignée.
– diamètre nominal / fixation par 4 vis D = Ø100 à Ø113 mm.
1) Photo non contractuelle
A
89,5
1529
Y 2+ 2– 1– 1+
Ø7
Ø81 miniD
AØ81
5813
29Y
2+ 2– 1– 1+
Ø81
1– 1+
20
15
2–2+
1–
1+75
G
1+1–
2+
2–
20 20
100
x 10
0Ø1028
10,598
20 20 20
2+
2–
100
x 10
0Ø1032
12,5
7 7
4/44 Bosch Rexroth AG Hydraulics THE5 RF 29881/09.10
Cotes d’encombrement (en mm)
Manipulateur Signal et CAN THES5, THESW5, THEC5
4THE5, 6THE5, 8THE5
Manipulateur Puissance THE5
Encombrement en fonction du type de poignée
Type de poignée Y (avec levier coudé) Z (avec levier droit)EC2000 207 211,5
Caractéristiques particulières– Le 2THE5R est disponible en version Signal Tension, CAN,
Signal PWM ou Puissance.– Compatibilité électromagnétique (CEM) à partir des normes
ISO 7637, 11452.– Ergonomie similaire à celle des télécommandes électroni-
ques de type 2THE6R et hydrauliques de type 2TH6R.– Durée de vie jusqu’à 1 million de cycles.– Jusqu’à 2 axes proportionnels intégrés.
Branchement: schéma de principeVoir pages 5 (Signal Tension), 7 (Signal PWM), 9 (CAN), ou 11 (Puissance 2)).
Courbes caractéristiques des sortiesVoir pages 5 (Signal Tension), 7 (Signal PWM), 9 (CAN), ou 11 (Puissance 2)).
ApplicationLa télécommande hydraulique à pédale de type 2THE5R est destiné à la commande par le pied de fonctions diverses.
2THE5R
1) Photo non contractuelle2) La version puissance est en cours de développement
Mini Maxi
Précautions de montage– Surface de bridage: planéité = 0,5 mm.– Dimension des têtes de vis = Ø 13 mm.– Couple de serrage des vis de bridage = 10 Nm maxi.
Cotes d’encombrement (en mm) Implantation
2THE5 RC 1)
6/44 Bosch Rexroth AG Hydraulics THE5 RF 29881/09.10
1) 6THE5 avec poignée EC2000+ ou EC4000 ou EC3000+2) 8THE5 avec poignée EC40003) Désigner les manipulateurs Signal avec 2 axes maximum
car les axes supplémentaires des poignées EC3000 et EC4000 ne sont pas gérés par l‘électronique du manipulateur
4) 4THE5, 6THE5 et 8THE55) Uniquement valable pour les joysticks CAN
Guide de paramétragePour le signal PWM, imprimer les pages 15 à 16. Pour le signal Puissance, imprimer les pages 24 à 26. Pour le signal CAN, imprimer les pages 35 à 37.Remplir les grilles de paramètres en respectant les règles suivantes:
Paramètre
(donne les noms des paramètres de la liste)
Valeur
(entrer votre choix dans cette colonne)
Choix disponible
(donne des informations à propos des valeurs possibles)
Défaut
(donne la valeur par défaut si aucun choix n'a été défini)
NOM_PARAMETRE
[X-Y]Cela signifie que vous pouvez selectionner une valeur com-prise entre X et Y, la résolu-
tion est donné avec les unités.
Valeur par défaut et unité
[X;Y]Cela signifie que vous pouvez selectionner seulement X ou Y.
– Fonction 1– Fonction 2
(…)Cela signifie que vous pouvez
selectionner uniquement une fonction dans la liste.
YES / NOSelectionner YES pour avoir la fonction active ou NO pour avoir la fonction désactivée.
Caractéristiques mécaniques (pour toute utilisation en dehors de ces caractéristiques, nous consulter)
Type de THE5 Manipulateurs PédalesDurée de vie 5 millions de manœuvres 1) 1 million de manœuvres 1)
Plage de températureDe stockage, ambiante °C –40 à +85De fonctionnement °C –20 à +60
Résistance aux vibrations et chocs fréquence 11 à 2000 Hz accél const 5 g. Nous consulterDegré de protection électronique IP 67Couple de manœuvre Nm
Début de course 0,6 3Pleine course 1,5 7Maximum admissible de l’organe de commande lors d’effort exceptionnel
100 200
Angle de manœuvre en degrésSur l’axe longitudinal 20° 12°Sur l’axe latéral 20° /
Masse Kg 1 2,3
Paramétrage du logiciel
1) Endurance réalisée sous la seule contrainte des efforts de rappel de l’appareil (pleine course).
8/44 Bosch Rexroth AG Hydraulics THE5 RF 29881/09.10
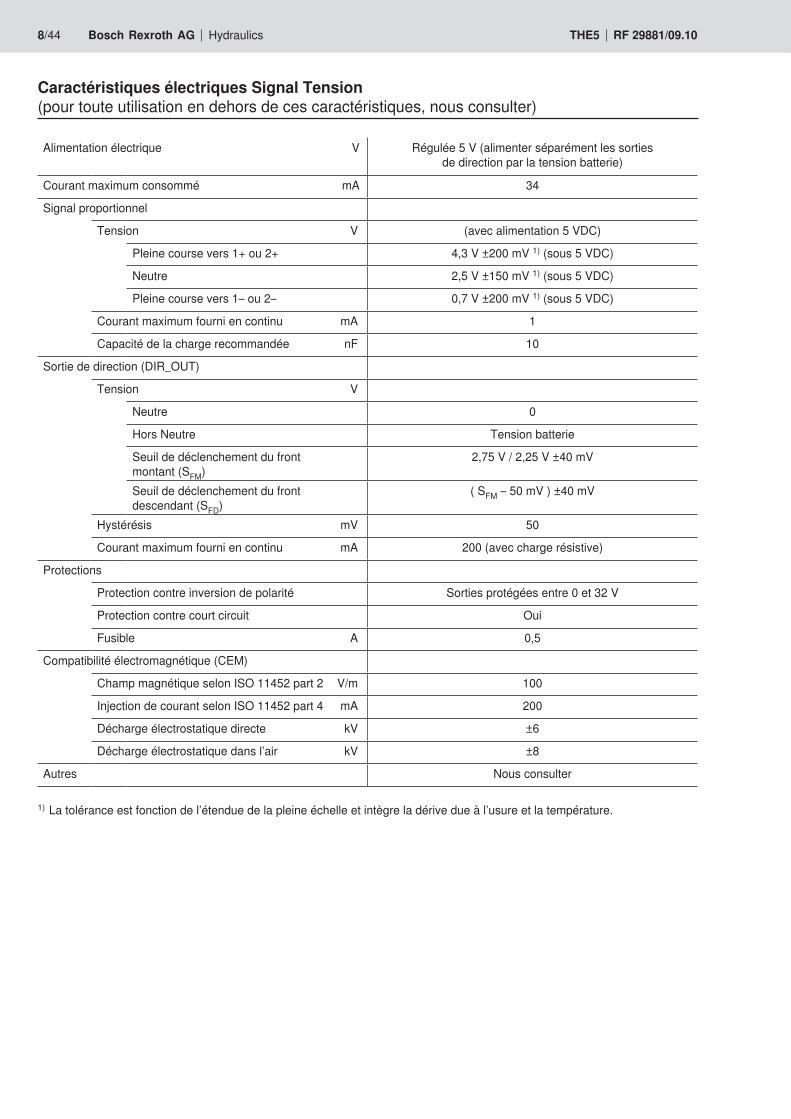
Caractéristiques électriques Signal Tension (pour toute utilisation en dehors de ces caractéristiques, nous consulter)
1) La tolérance est fonction de l’étendue de la pleine échelle et intègre la dérive due à l’usure et la température.
Alimentation électrique V Régulée 5 V (alimenter séparément les sorties de direction par la tension batterie)
Courant maximum consommé mA 34
Signal proportionnel
Tension V (avec alimentation 5 VDC)
Pleine course vers 1+ ou 2+ 4,3 V ±200 mV 1) (sous 5 VDC)
Neutre 2,5 V ±150 mV 1) (sous 5 VDC)
Pleine course vers 1– ou 2– 0,7 V ±200 mV 1) (sous 5 VDC)
Courant maximum fourni en continu mA 1
Capacité de la charge recommandée nF 10
Sortie de direction (DIR_OUT)
Tension V
Neutre 0
Hors Neutre Tension batterie
Seuil de déclenchement du front montant (SFM)
2,75 V / 2,25 V ±40 mV
Seuil de déclenchement du front descendant (SFD)
( SFM – 50 mV ) ±40 mV
Hystérésis mV 50
Courant maximum fourni en continu mA 200 (avec charge résistive)
Protections
Protection contre inversion de polarité Sorties protégées entre 0 et 32 V
Protection contre court circuit Oui
Fusible A 0,5
Compatibilité électromagnétique (CEM)
Champ magnétique selon ISO 11452 part 2 V/m 100
Injection de courant selon ISO 11452 part 4 mA 200
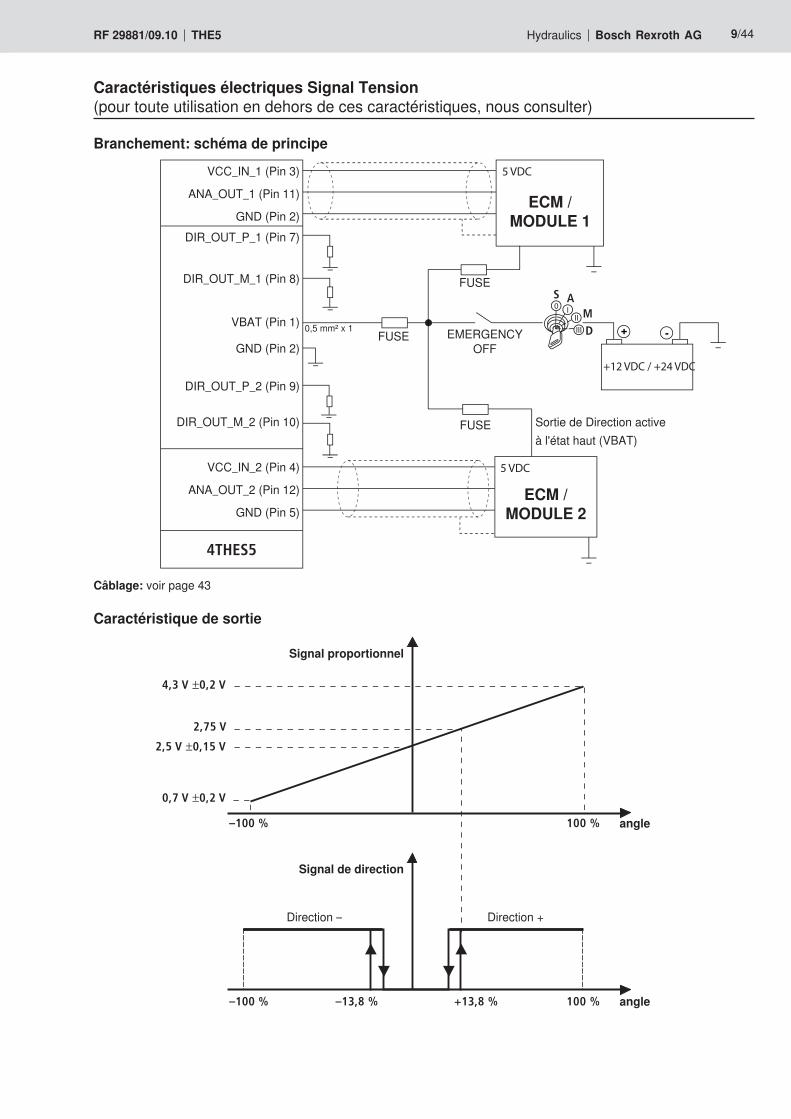
Caractéristiques électriques Signal Tension (pour toute utilisation en dehors de ces caractéristiques, nous consulter)
FUSE
EMERGENCYOFF
FUSE
0,5 mm² x 1
0,5 mm² x 1
50 %
–100 98 100
V BAT V BAT
12/44 Bosch Rexroth AG Hydraulics THE5 RF 29881/09.10
Paramètrage du logiciel en signal PWM
Sorties du signal PWM
1) les grilles sont situées à la fin de ce chapitre
rapport cyclique PWM (%)
DUTY_CYCLE_MAX
100-DUTY_CYCLE_MAXangle (%)
Voir grille #1 1)
Port d'Entrée / Sortie DigitalLe Signal PWM intégre 4 ports d'entrée / sortie digitaux configurables et 3 ports d'entrée digitales non configurables. Les entrées sont actives lorsqu'elles sont connectées à la masse par circuit externe et elles sont inactives lorsqu'elles sont déconnectées de la masse, la polarisation haute est faite intérieurement.Ne pas oublier la résistance interne de polarisation haute de 8,2 kOhm quand la sortie est inactive pour calculer la charge externe et le voltage:
Paramètre des fonctions1. Sorties Direction et Rupture de neutreCette fonction utilise un port de sortie. L'activation place le port de sortie à la tension de la batterie (200 mA max).Ne pas oublier la résistance interne de polarisation haute de 8,2 kOhm quand la sortie est inactive pour calculer la charge externe et le voltage. La Direction est active lorsque le capteur de position sort de l'écart neutre défini en pourcents du trajet total (NEUTRAL_DEAD_BAND).
Il existe 6 modes:– Direction Plus sur Axe 1 (D1P): Le port de sortie est actif lorsque l'axe 1 va dans la direction de 1 Plus– Direction Moins sur Axe 1 (D1M): Le port de sortie est actif lorsque l'axe 1 va dans la direction de 1 Moins– Direction Plus sur Axe 2 (D2P): Le port de sortie est actif lorsque l'axe 1 va dans la direction de 2 Plus– Direction Moins sur Axe 2 (D2M): Le port de sortie est actif lorsque l'axe 1 va dans la direction de 2 Moins– Rupture de neutre Axe 1 (OU1): Le port de sortie est actif dans les deux directions Plus et Moins sur Axe 1– Rupture de neutre Axe 2 (OU2): Le port de sortie est actif dans les deux directions Plus et Moins sur Axe 2
2. Sortie Indicateur de StatutCette fonction utilise un port de sortie. L'activation place le port de sortie à la tension de la batterie (200 mA max).Connecter une DEL à la sortie correspondante en prenant en compte la résistance interne de polarisation haute de 8,2 kOhm quand la sortie est inactive.
Il existe 2 modes:– Indicateur de défaut (FLT): Ce mode allumera la DEL en cas de défaut.– Indicateur "Ready to Work" (RTW): Ce mode allumera la DEL si aucun défaut n'est détecté.
Voir grille #3 1)
3. Entrée SécuritéCette fonction utlise un port d'entrée. Elle est activé lorsque le port est connecté à la masse. La fonction Sécurité autorise de geler le signal du manipulateur en position neutre si l'entrée assignée n'est pas activée, et ceci peu importe la position des capteurs. La transition sera effectuée sans temps de rampe.
Il existe 2 modes pour activer les signaux des sorties:– Permanent: Les signaux des sorties sont activés lorsque l'entrée reste connectée à la masse.– Chien de garde: Les signaux des sorties sont activés lorsque l'entrée change périodiquement de connectée à déconnectée.
Voir grille #4 1)
1) les grilles sont situées à la fin de ce chapitre
Paramètrage du logiciel en signal PWM
50 %
–100 98 100
14/44 Bosch Rexroth AG Hydraulics THE5 RF 29881/09.10
4. Fonction Floating
1) les grilles sont situées à la fin de ce chapitre
Rapport cyclique PWM (%)
DUTY_CYCLE_MAX
100-DUTY_CYCLE_MAX
NEUTRAL_DEAD_BAND
angle (%)
FLOAT_OUTPUT
FLOAT_TRIGGER
Paramètrage du logiciel en signal PWM
Le flottement autorise de passer le tiroir assigné en quatrième position.
La fonction Floating utilise un port d'entrée et est active lorsque le port est connecté à la masse (l'entrée n'a pas besoin de rester active après), et si l'activation de la sortie est dans l'éventail [80 %-90 %]. Le flottement restera actif jusqu'à ce que l'axe sorte de la rupture de neutre dans la direction où le flottement a été assigné.
Le rapport cyclique PWM du Floating, le rapport cyclique PWM de déclenchement , le(s) axe(s) et le(s) direction(s) assignés au flottement peuvent être sélectionnés dans la grille.
Note 1: Le rapport cyclique PWM est toujours 50 % au neutre.Note 2: Le rapport cyclique maximum est atteint à 98 % de l'angle (exemple: 19,6° pour un manipulateur 20°), cette valeur n'est pas ajustable.Note 3: La tension de sortie PWM est de 5 V pour un niveau haut, 0 VDC pour un niveau bas (non adustable)
Grille #2:
Paramètre Valeur Choix disponible Défaut
FUNCTION_DIO_1FONCTIONS D'ENTREE– Pas de Fonction (NOF)– Floating (FLO)– Sécurité (DMA)
FONCTIONS DE SORTIE– Axe 1 Direction + (D1P)– Axe 1 Direction – (D1M)– Axe 1 Rupture de neutre (OU1)– Axe 2 Direction + (D2P)– Axe 2 Direction – (D2M)– Axe 2 Rupture de neutre (OU2)– Indicateur de Statut (STA)
NOF
FUNCTION_DIO_2 NOF
FUNCTION_DIO_3 NOF
FUNCTION_DIO_4 NOF
FUNCTION_DI_5
FONCTIONS D'ENTREE– Pas de Fonction (NOF)– Floating (FLO)– Sécurité (DMA)
NOF
FUNCTION_DI_6 NOF
FUNCTION_DI_7 NOF
Note 1: Les fonctions Floating, Sécurité et Indicateur de Statut exigent des paramètres additionnels, se référer à la section "Paramètre des Fonctions" pour plus de détails.Note 2: Les fonctions Floating et Sécurité peuvent être assignées à une entrée maximum.
Grilles Signal PWM
16/44 Bosch Rexroth AG Hydraulics THE5 RF 29881/09.10
Grilles Signal PWM
Grille #3:
Paramètre Valeur Choix disponible Défaut
STATUS_MODE – Indicateur de défaut (FLT) – Indicateur "Ready to work" (RTW) FLT
Grille #4:
Paramètre Valeur Choix disponible Défaut
DEAD_MAN_MODE – Permanent (PER) – Chien de garde (WDG) PER
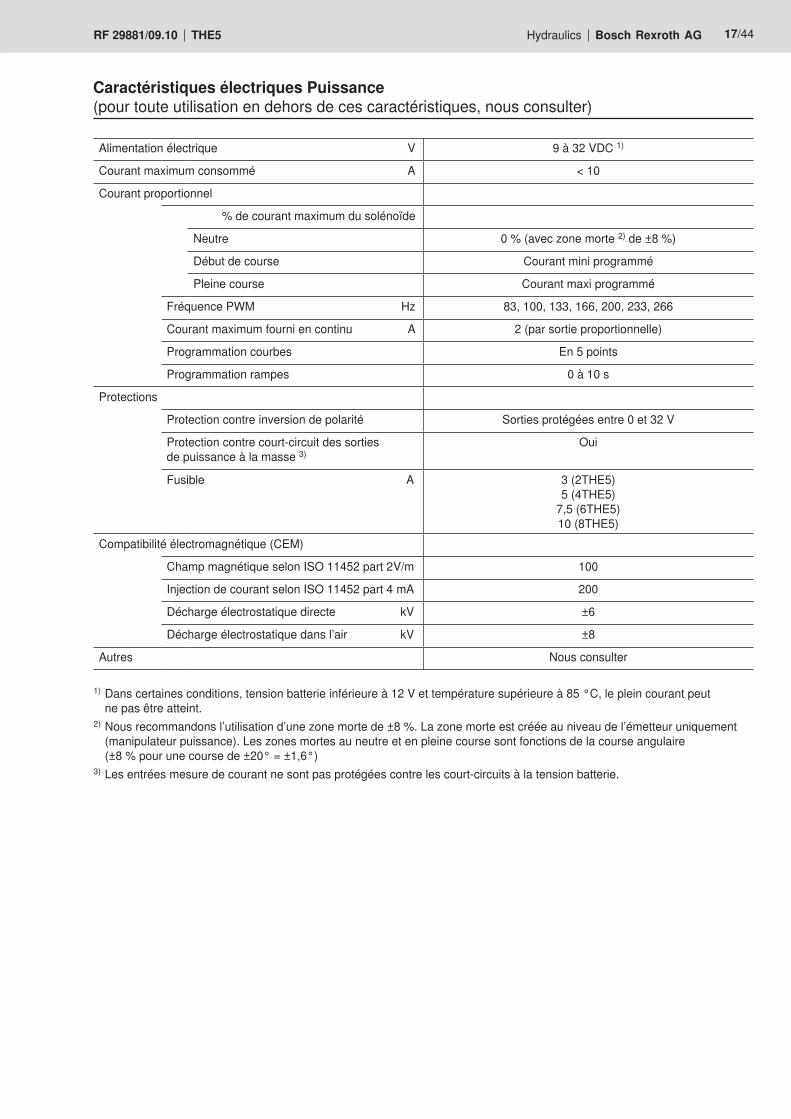
1) Dans certaines conditions, tension batterie inférieure à 12 V et température supérieure à 85 °C, le plein courant peut ne pas être atteint.
2) Nous recommandons l’utilisation d’une zone morte de ±8 %. La zone morte est créée au niveau de l’émetteur uniquement (manipulateur puissance). Les zones mortes au neutre et en pleine course sont fonctions de la course angulaire (±8 % pour une course de ±20° = ±1,6°)
3) Les entrées mesure de courant ne sont pas protégées contre les court-circuits à la tension batterie.
Alimentation électrique V 9 à 32 VDC 1)
Courant maximum consommé A < 10
Courant proportionnel
% de courant maximum du solénoïde
Neutre 0 % (avec zone morte 2) de ±8 %)
Début de course Courant mini programmé
Pleine course Courant maxi programmé
Fréquence PWM Hz 83, 100, 133, 166, 200, 233, 266
Courant maximum fourni en continu A 2 (par sortie proportionnelle)
Programmation courbes En 5 points
Programmation rampes 0 à 10 s
Protections
Protection contre inversion de polarité Sorties protégées entre 0 et 32 V
Protection contre court-circuit des sorties de puissance à la masse 3)
Oui
Fusible A 3 (2THE5)5 (4THE5)
7,5 (6THE5)10 (8THE5)
Compatibilité électromagnétique (CEM)
Champ magnétique selon ISO 11452 part 2 V/m 100
Injection de courant selon ISO 11452 part 4 mA 200
Décharge électrostatique directe kV ±6
Décharge électrostatique dans l’air kV ±8
Autres Nous consulter
Caractéristiques électriques Puissance (pour toute utilisation en dehors de ces caractéristiques, nous consulter)
VCC_OUT_1
ANA_IN_3 (4)
GND_CPU
V bat
V bat
18/44 Bosch Rexroth AG Hydraulics THE5 RF 29881/09.10
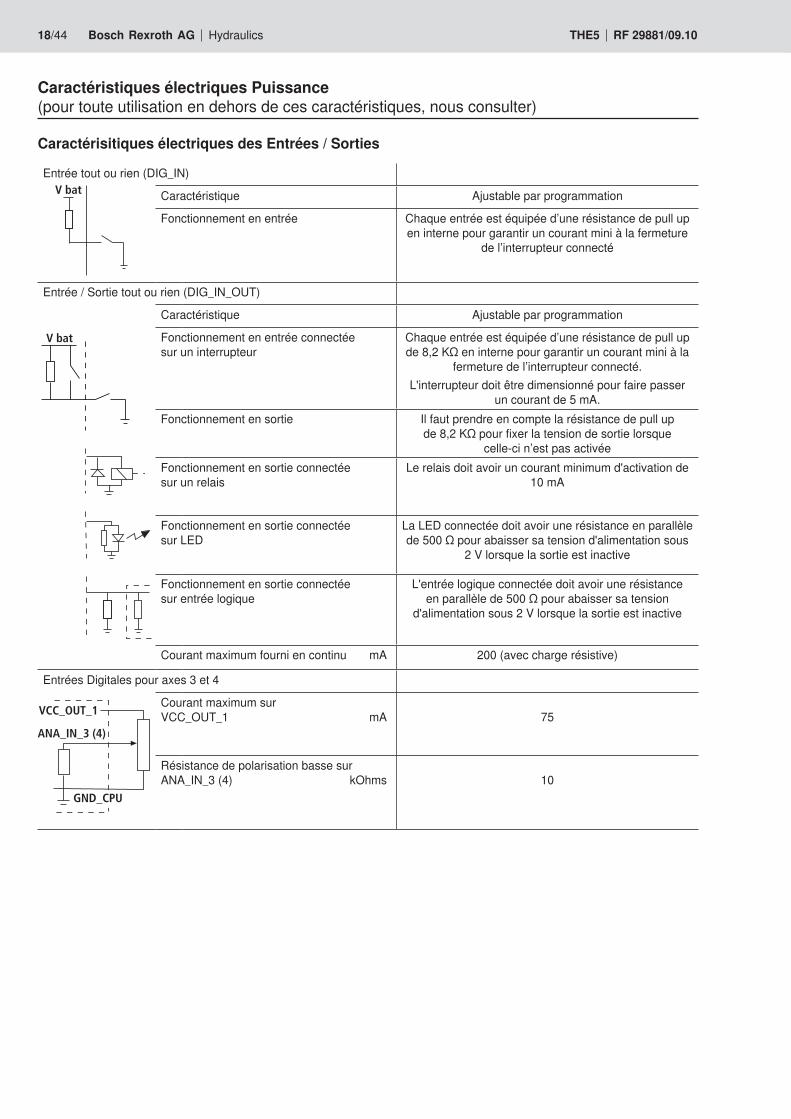
Entrée tout ou rien (DIG_IN)
Caractéristique Ajustable par programmation
Fonctionnement en entrée Chaque entrée est équipée d’une résistance de pull up en interne pour garantir un courant mini à la fermeture
de l’interrupteur connecté
Entrée / Sortie tout ou rien (DIG_IN_OUT)
Caractéristique Ajustable par programmation
Fonctionnement en entrée connectée sur un interrupteur
Chaque entrée est équipée d’une résistance de pull up de 8,2 KΩ en interne pour garantir un courant mini à la
fermeture de l’interrupteur connecté.L'interrupteur doit être dimensionné pour faire passer
un courant de 5 mA.Fonctionnement en sortie Il faut prendre en compte la résistance de pull up
de 8,2 KΩ pour fixer la tension de sortie lorsque celle-ci n’est pas activée
Fonctionnement en sortie connectée sur un relais
Le relais doit avoir un courant minimum d'activation de 10 mA
Fonctionnement en sortie connectée sur LED
La LED connectée doit avoir une résistance en parallèle de 500 Ω pour abaisser sa tension d'alimentation sous
2 V lorsque la sortie est inactive
Fonctionnement en sortie connectée sur entrée logique
L'entrée logique connectée doit avoir une résistance en parallèle de 500 Ω pour abaisser sa tension
d'alimentation sous 2 V lorsque la sortie est inactive
Courant maximum fourni en continu mA 200 (avec charge résistive)
Entrées Digitales pour axes 3 et 4
Courant maximum sur VCC_OUT_1 mA
75
Résistance de polarisation basse sur ANA_IN_3 (4) kOhms
10
Caractérisitiques électriques des Entrées / Sorties
Caractéristiques électriques Puissance (pour toute utilisation en dehors de ces caractéristiques, nous consulter)
Entrée / Sortie Programmable utilisée comme une ENTRÉE active à l’état bas (GND)Entrée / Sortie Programmable utilisée comme une SORTIE active à l’état haut (VBAT)
Outil de configuration: voir page 42Câblage: voir page 46
Rampes
Pour chaque sortie proportionnelle une courbe de régulation peut être adaptée au système client (solénoïde).La programmation de la courbe de régulation de chaque sortie est réalisée en définissant les coordonnées de 5 points.
Chaque courbe de régulation dispose d’une rampe montante et d’une rampe descendante.La programmation permet d’adapter la durée de la rampe à la fonction commandée.
angle
temps
consigne
Temps rampe descendante
Temps rampe montante
Consigne de courant (en fonction du courant max défini sur la sortie)
Caractéristiques électriques Puissance (pour toute utilisation en dehors de ces caractéristiques, nous consulter)
20/44 Bosch Rexroth AG Hydraulics THE5 RF 29881/09.10
Sorties Puissance1. Caractéristiques du réducteur de pression
Les manipulateur THE5 sont capables de piloter des réducteurs de pression tant que le courant est dans l'éventail [0,25 ; 2,4] (A). Ils sont aussi capables de contrôler des bobines Black and White (à bascule). Pour de meilleurs performances, tous les réducteurs de pression connectés doivent être du même type (Resistance, Tension).
a) Réducteurs de pression standards
Voir Grille #6 1)
12 Volts
FTDRE218 BAR
MHDRE218 BAR
MHDRE224 BAR
MHDRE230 BAR
RESISTANCE (Ω) 2,4 3,5 2,4 3,5
PWM_FREQUENCY (Hz) 150 150 150 150
MIN_CURRENT (A) 0,80 0,60 0,60 0,60
MAX_CURRENT (A) 1,80 1,70 1,70 1,70
24 Volts
FTDRE218 BAR
MHDRE218 BAR
MHDRE224 BAR
MHDRE230 BAR
RESISTANCE (Ω) 12 10,9 12 10,9
PWM_FREQUENCY (Hz) 150 150 150 150
MIN_CURRENT (A) 0,36 0,34 0,26 0,34
MAX_CURRENT (A) 0,80 1,95 0,75 0,95
Paramètrage du logiciel en Puissance
Caractéristiques de sortie
angle
Courant de sortie avec la courbe standard
angle
Signal de direction (si actif)
Direction – Direction +
Caractéristiques électriques Puissance (pour toute utilisation en dehors de ces caractéristiques, nous consulter)
1) les grilles sont situées à la fin de ce chapitre
1) les grilles sont situées à la fin de ce chapitre
b) Réducteurs de pression non standards
Pour les bobines non standards, les informations de la grille suivante sont nécéssaires. Notez que toutes les charges sont supposées être identiques.
Voir Grille #7 1) 2. Forme des courbes
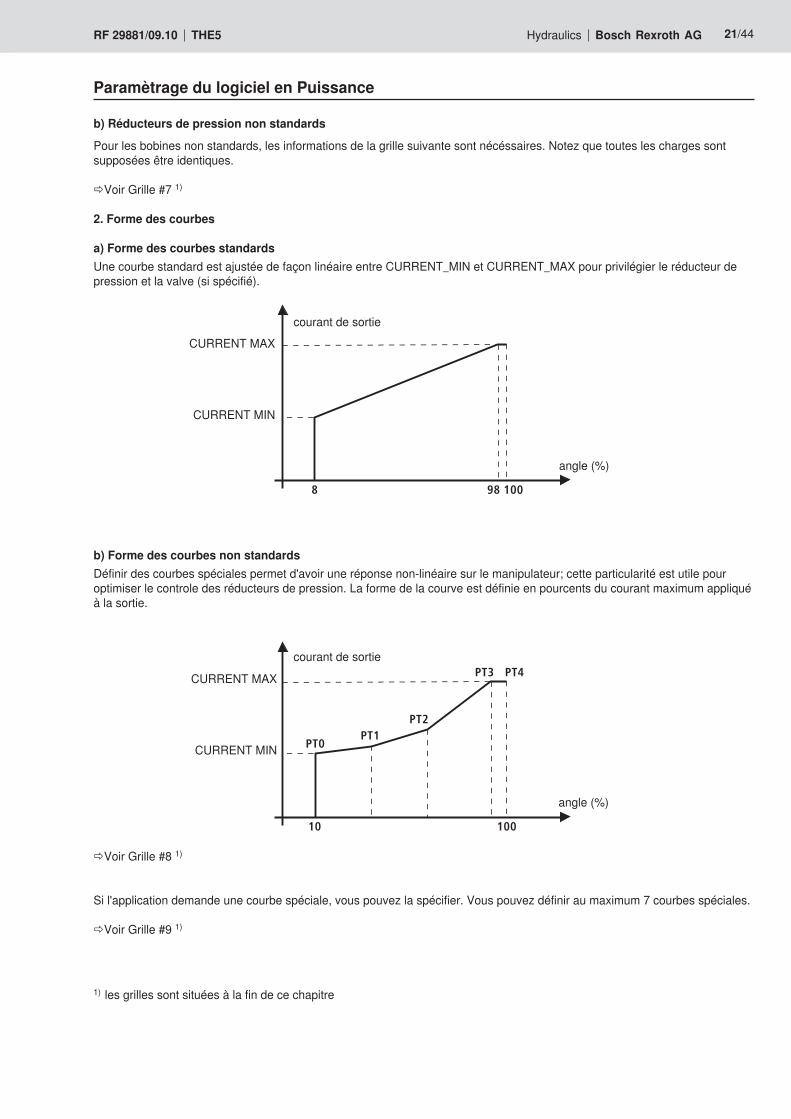
a) Forme des courbes standardsUne courbe standard est ajustée de façon linéaire entre CURRENT_MIN et CURRENT_MAX pour privilégier le réducteur de pression et la valve (si spécifié).
Paramètrage du logiciel en Puissance
angle (%)
courant de sortie
CURRENT MAX
CURRENT MIN
angle (%)
courant de sortie
CURRENT MAX
CURRENT MIN
b) Forme des courbes non standardsDéfinir des courbes spéciales permet d'avoir une réponse non-linéaire sur le manipulateur; cette particularité est utile pour optimiser le controle des réducteurs de pression. La forme de la courve est définie en pourcents du courant maximum appliqué à la sortie.
Voir Grille #8 1)
Si l'application demande une courbe spéciale, vous pouvez la spécifier. Vous pouvez définir au maximum 7 courbes spéciales.
Voir Grille #9 1)
V BAT V BAT
22/44 Bosch Rexroth AG Hydraulics THE5 RF 29881/09.10
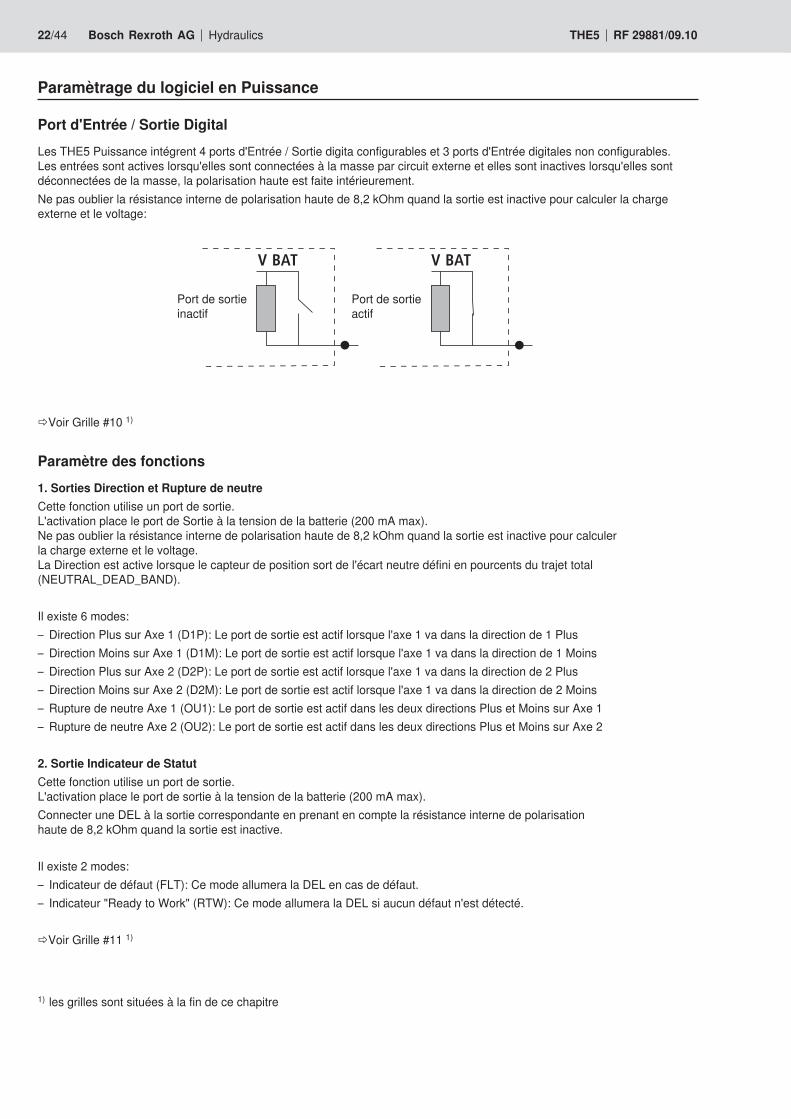
Port d'Entrée / Sortie DigitalLes THE5 Puissance intégrent 4 ports d'Entrée / Sortie digita configurables et 3 ports d'Entrée digitales non configurables. Les entrées sont actives lorsqu'elles sont connectées à la masse par circuit externe et elles sont inactives lorsqu'elles sont déconnectées de la masse, la polarisation haute est faite intérieurement.Ne pas oublier la résistance interne de polarisation haute de 8,2 kOhm quand la sortie est inactive pour calculer la charge externe et le voltage:
Voir Grille #10 1)
Paramètre des fonctions1. Sorties Direction et Rupture de neutreCette fonction utilise un port de sortie. L'activation place le port de Sortie à la tension de la batterie (200 mA max). Ne pas oublier la résistance interne de polarisation haute de 8,2 kOhm quand la sortie est inactive pour calculer la charge externe et le voltage. La Direction est active lorsque le capteur de position sort de l'écart neutre défini en pourcents du trajet total (NEUTRAL_DEAD_BAND).
Il existe 6 modes:– Direction Plus sur Axe 1 (D1P): Le port de sortie est actif lorsque l'axe 1 va dans la direction de 1 Plus– Direction Moins sur Axe 1 (D1M): Le port de sortie est actif lorsque l'axe 1 va dans la direction de 1 Moins– Direction Plus sur Axe 2 (D2P): Le port de sortie est actif lorsque l'axe 1 va dans la direction de 2 Plus– Direction Moins sur Axe 2 (D2M): Le port de sortie est actif lorsque l'axe 1 va dans la direction de 2 Moins– Rupture de neutre Axe 1 (OU1): Le port de sortie est actif dans les deux directions Plus et Moins sur Axe 1– Rupture de neutre Axe 2 (OU2): Le port de sortie est actif dans les deux directions Plus et Moins sur Axe 2
2. Sortie Indicateur de StatutCette fonction utilise un port de sortie. L'activation place le port de sortie à la tension de la batterie (200 mA max).Connecter une DEL à la sortie correspondante en prenant en compte la résistance interne de polarisation haute de 8,2 kOhm quand la sortie est inactive.
Il existe 2 modes:– Indicateur de défaut (FLT): Ce mode allumera la DEL en cas de défaut.– Indicateur "Ready to Work" (RTW): Ce mode allumera la DEL si aucun défaut n'est détecté.
Voir Grille #11 1)
Paramètrage du logiciel en Puissance
1) les grilles sont situées à la fin de ce chapitre
3. Entrée SécuritéCette fonction utlise un port d'entrée. Elle est activé lorsque le port est connecté à la masse. La fonction Sécurité autorise de geler le signal du manipulateur en position neutre si l'entrée assignée n'est pas activée, et ceci peu importe la position des capteurs. La transition sera effectuée sans temps de rampe.
Il existe 2 modes pour activer les signaux des sorties:– Permanent: Les signaux des sorties sont activés lorsque l'entrée reste connectée à la masse.– Chien de garde: Les signaux des sorties sont activés lorsque l'entrée change périodiquement de connectée à déconnectée.
Voir Grille #12 1)
4. Fonction Fine ControlCette fonction utilise un port d'Entrée. Elle est activé lorsque le port est connecté à la masse.Lorsque la fonction est active, le réglage courbe contrôle précis est actif. Lorsque la fonction est inactive, le réglage courbe normalement controlée est actif.Divers réglages peuvent être définis, d'un seul axe jusqu'à tous les axes dans la même configuration. La modification du réglage "Fine Control" est possible quelque soit la position de la consigne.
Sorties secondairesPour aussurer la compatibilité avec le manipulateur 4THE6, les sorties secondaires peuvent être activées.Une sortie secondaire permet de diriger 2 axes utilisant une seule et même consigne capteur:– Le capteur de l'Axe 1 est utlisé pour diriger les sorties de l'axe 3– Le capteur de l'Axe 2 est utlisé pour diriger les sorties de l'axe 4Evidemment, les capteurs des axes 3 et 4 ne sont pas demandés pour une telle application.
Voir Grille #13 1)
Paramètrage du logiciel en Puissance
1) les grilles sont situées à la fin de ce chapitre
24/44 Bosch Rexroth AG Hydraulics THE5 RF 29881/09.10
Note 1: TARGET_AXIS et TARGET_DIRECTION définissent la sortie où vous souhaitez avoir la courbe spéciale.Note 2: CURVE_TYPE définit si la courbe est activée lorsque la fonction "Fine Control" est en marche ou éteinte.Note 3: Si la sortie est définie avec un courant maximum de 1,7 A, vous définirez Y_PT(%) entre 0 et 100 % de 1,7 A. Normalement, Y_PT0 pourra être réglé à 40 % pour sortir un courant de 680 mA au point de départ X_PT0.Note 4: Le paramètre RAMP définit le temps que la sortie mettera pour aller de 0 à 100 % avec une courbe linéaire. Si Y_PT0 est à 50 % par exemple, le temps de rampe sera divisé par 2. La resolution de la rampe est de 25,6 ms.
26/44 Bosch Rexroth AG Hydraulics THE5 RF 29881/09.10
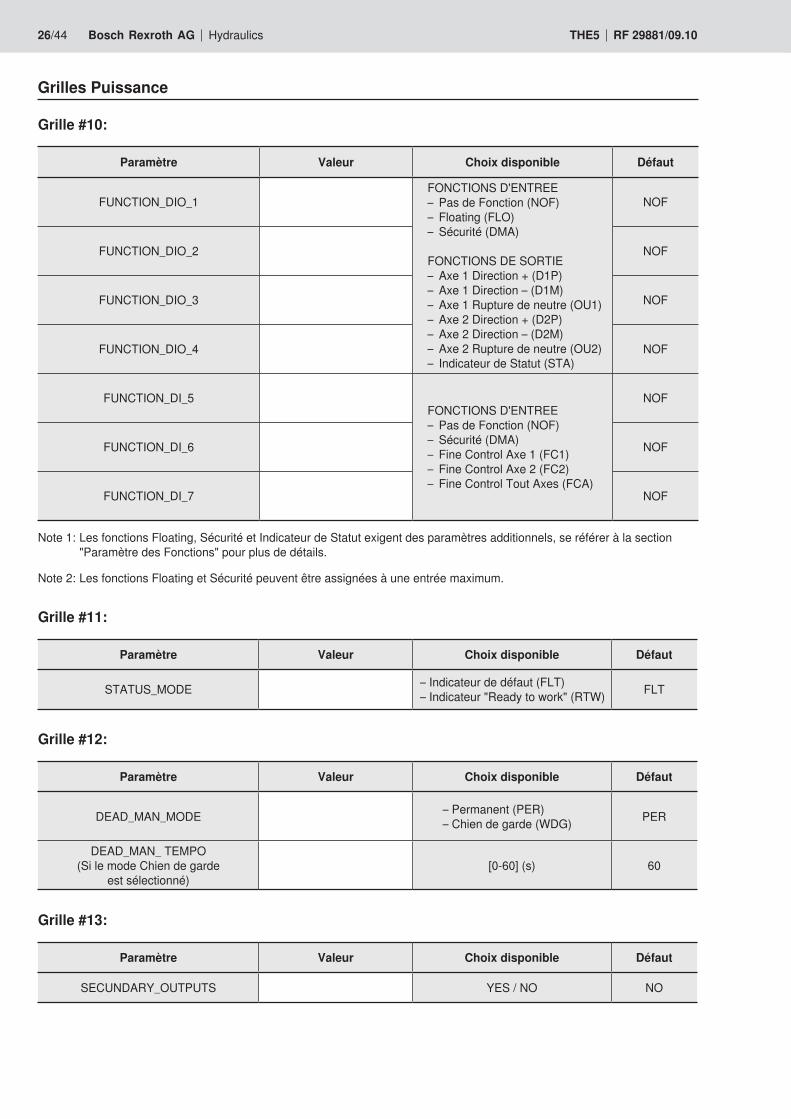
Grilles Puissance
Grille #10:
Paramètre Valeur Choix disponible Défaut
FUNCTION_DIO_1FONCTIONS D'ENTREE– Pas de Fonction (NOF)– Floating (FLO)– Sécurité (DMA)
FONCTIONS DE SORTIE– Axe 1 Direction + (D1P)– Axe 1 Direction – (D1M)– Axe 1 Rupture de neutre (OU1)– Axe 2 Direction + (D2P)– Axe 2 Direction – (D2M)– Axe 2 Rupture de neutre (OU2)– Indicateur de Statut (STA)
NOF
FUNCTION_DIO_2 NOF
FUNCTION_DIO_3 NOF
FUNCTION_DIO_4 NOF
FUNCTION_DI_5FONCTIONS D'ENTREE– Pas de Fonction (NOF)– Sécurité (DMA)– Fine Control Axe 1 (FC1)– Fine Control Axe 2 (FC2)– Fine Control Tout Axes (FCA)
NOF
FUNCTION_DI_6 NOF
FUNCTION_DI_7 NOF
Note 1: Les fonctions Floating, Sécurité et Indicateur de Statut exigent des paramètres additionnels, se référer à la section "Paramètre des Fonctions" pour plus de détails.
Note 2: Les fonctions Floating et Sécurité peuvent être assignées à une entrée maximum.
Grille #11:
Paramètre Valeur Choix disponible Défaut
STATUS_MODE – Indicateur de défaut (FLT)– Indicateur "Ready to work" (RTW) FLT
Grille #12:
Paramètre Valeur Choix disponible Défaut
DEAD_MAN_MODE – Permanent (PER)– Chien de garde (WDG) PER
Caractéristiques électriques Bus CAN (pour toute utilisation en dehors de ces caractéristiques, nous consulter)
1) Nous recommandons l’utilisation d’une zone morte de ±8 %. La zone morte peut être créée au niveau de l’émetteur (manipulateur CAN) ou du récepteur. Par défaut, il n’y a pas de zone morte sur l’émetteur.
Alimentation électrique V 9 à 32 VDC
Courant maximum consommé mA 300
Signal de sortie
% de ±250 (codage de la consigne sur 1 octet)
Neutre 0 % 1)
Pleine course ±100 % 1)
Fréquence de bus kHz 100, 125, 250, 500
Protocole (voir page 29) 2.0 A ou 2.0 B
Protections
Protection contre inversion de polarité Sorties protégées entre 0 et 32 V
Protection contre court circuit Oui
Fusible A 2
Compatibilité électromagnétique (CEM)
Champ magnétique selon ISO 11452 part 2 V/m 100
Injection de courant selon ISO 11452 part 4 mA 200
Décharge électrostatique directe kV ±6
Décharge électrostatique dans l’air kV ±8
Autres Nous consulter
VCC_OUT_1
ANA_IN_3 (4)
GND_CPU
V bat
V bat
28/44 Bosch Rexroth AG Hydraulics THE5 RF 29881/09.10
Entrée tout ou rien (DIG_IN)
Caractéristique Ajustable par programmation
Fonctionnement en entrée Chaque entrée est équipée d’une résistance de pull up en interne pour garantir un courant mini à la fermeture
de l’interrupteur connecté
Entrée / Sortie tout ou rien (DIG_IN_OUT)
Caractéristique Ajustable par programmation
Fonctionnement en entrée connectée sur un interrupteur
Chaque entrée est équipée d’une résistance de pull up de 8,2 KΩ en interne pour garantir un courant mini à la
fermeture de l’interrupteur connecté.L'interrupteur doit être dimensionné pour faire passer
un courant de 5 mA.Fonctionnement en sortie Il faut prendre en compte la résistance de pull up
de 8,2 KΩ pour fixer la tension de sortie lorsque celle-ci n’est pas activée
Fonctionnement en sortie connectée sur un relais
Le relais doit avoir un courant minimum d'activation de 10 mA
Fonctionnement en sortie connectée sur LED
La LED connectée doit avoir une résistance en parallèle de 500 Ω pour abaisser sa tension d'alimentation sous
2 V lorsque la sortie est inactive
Fonctionnement en sortie connectée sur entrée logique
L'entrée logique connectée doit avoir une résistance en parallèle de 500 Ω pour abaisser sa tension
d'alimentation sous 2 V lorsque la sortie est inactive
Courant maximum fourni en continu mA
200 (avec charge résistive)
Entrées Digitales pour axes 3 et 4
Résistance de polarisation basse sur ANA_IN_3 (4) mA
75
Résistance de polarisation basse sur ANA_IN_3 (4) kOhms
10
Caractérisitiques électriques des Entrées / Sorties
Caractéristiques électriques Bus CAN (pour toute utilisation en dehors de ces caractéristiques, nous consulter)
Bit 0: 0Bit 1: Axe1+ Bit 1: DIG_IN_OUT_2 Bit 1: 0Bit 2: Axe2+ Bit 2: DIG_IN_OUT_3 Bit 2: 0Bit 3: Axe2– Bit 3: DIG_IN_OUT_4 Bit 3: 0Bit 4: Axe3+ Bit 4: DIG_IN_5
Bit 4-7: compteur
0->16
Bit 5: Axe3– Bit 5: DIG_IN_6Bit 6: Axe4+ Bit 6: DIG_IN_7Bit 7: Axe4– Bit 7: 0
Entrée / Sortie Programmable utilisée comme une ENTRÉE active à l’état bas (GND)Entrée / Sortie Programmable utilisée comme une SORTIE active à l’état haut (VBAT)
Outil de configuration: voir page 42Câblage: voir page 45
Caractéristique de sortie
Caractéristiques électriques Bus CAN (pour toute utilisation en dehors de ces caractéristiques, nous consulter)
Port d'Entrée / Sortie DigitaLes THE5 CAN intégrant 2 ports d'Entrée / Sortie digitaux configurables et 3 ports d'Entrée digitales non configurables. Les entrées sont actives lorsqu'elles sont connectées à la masse par circuit externe et elles sont inactives lorsqu'elles sont déconnectées de la masse, la polarisation haute est faite intérieurement.Ne pas oublier la résistance interne de polarisation haute de 8,2 kOhm quand la sortie est inactive pour calculer la charge externe et le voltage:
Voir Grille #18 1)
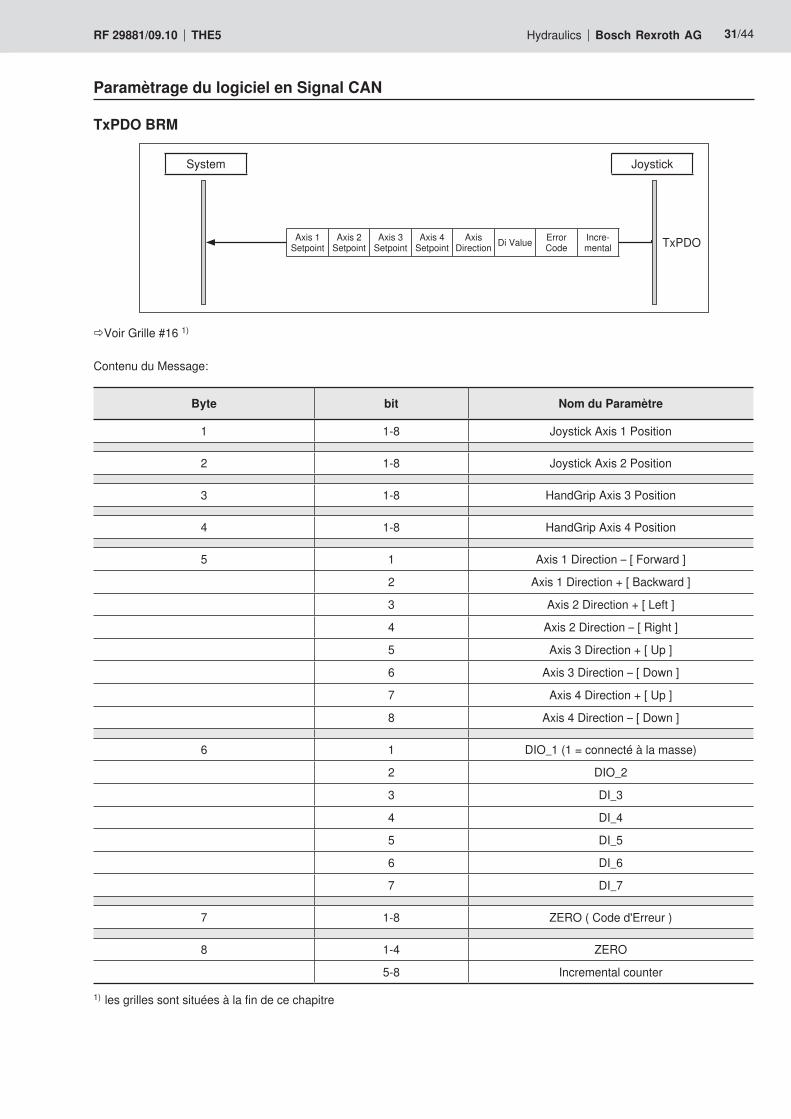
Paramètrage du logiciel en Signal CAN
Contenu du message EJM:
Byte bit Nom du Paramètre
1 1-2 Joystick Axis 3 NEUTRAL Direction Status
3-4 Joystick Axis 3 Direction + status
5-6 Joystick Axis 3 Direction – status
7-8 Joystick Axis 3 Position
2 1 Joystick Axis 3 Position
3 1-2 Joystick Axis 4 NEUTRAL Direction Status
3-4 Joystick Axis 4 Direction + status
5-6 Joystick Axis 4 Direction – status
7-8 Joystick Axis 4 Position
4 1 Joystick Axis 4 Position
5 1-8 Non défini
Non défini
Non défini
Non défini
6 1-8 Non défini
7 1-2 Non défini
3-4 Non défini
5-6 Non défini
7-8 Non défini
6 1-8 Non défini
Port de sortie actif
1) les grilles sont situées à la fin de ce chapitre
Port de sortie inactif
34/44 Bosch Rexroth AG Hydraulics THE5 RF 29881/09.10
Paramètre des fonctions1. Sorties Direction et Rupture de neutreCette fonction utilise un port de sortie. L'activation place le port de sortie à la tension de la batterie (200 mA max). Ne pas oublier la résistance interne de polarisation haute de 8,2 kOhm quand la sortie est inactive pour calculer la charge externe et le voltage.La Direction est active lorsque le capteur de position sort de l'écart neutre défini en pourcents du trajet total (NEUTRAL_DEAD_BAND).
Il existe 6 modes:– Direction Plus sur Axe 1 (D1P): Le port de sortie est actif lorsque l'axe 1 va dans la direction de 1 Plus– Direction Moins sur Axe 1 (D1M): Le port de sortie est actif lorsque l'axe 1 va dans la direction de 1 Moins– Direction Plus sur Axe 2 (D2P): Le port de sortie est actif lorsque l'axe 1 va dans la direction de 2 Plus– Direction Moins sur Axe 2 (D2M): Le port de sortie est actif lorsque l'axe 1 va dans la direction de 2 Moins– Rupture de neutre Axe 1 (OU1): Le port de sortie est actif dans les deux directions Plus et Moins sur Axe 1– Rupture de neutre Axe 2 (OU2): Le port de sortie est actif dans les deux directions Plus et Moins sur Axe 2
2. Sortie Indicateur de StatutCette fonction utilise un port de sortie. L'activation place le port de sortie à la tension de la batterie (200 mA max).Connecter une DEL à la sortie correspondante en prenant en compte la résistance interne de polarisation haute de 8,2 kOhm quand la sortie est inactive.
Il existe 2 modes:– Indicateur de défaut (FLT): Ce mode allumera la DEL en cas de défaut.– Indicateur "Ready to Work" (RTW): Ce mode allumera la DEL si aucun défaut n'est détecté. Voir grille #19 1)
3. Entrée SécuritéCette fonction utlise un port d'entrée. Elle est activé lorsque le port est connecté à la masse. La fonction Sécurité autorise de geler le signal du manipulateur en position neutre si l'entrée assignée n'est pas activée, et ceci peu importe la position des capteurs. La transition sera effectuée sans temps de rampe.
Il existe 2 modes pour activer les signaux des sorties:– Permanent: Les signaux des sorties sont activés lorsque l'entrée reste connectée à la masse.– Chien de garde: Les signaux des sorties sont activés lorsque l'entrée change périodiquement de connectée à déconnectée. Voir grille #20 1)
1) les grilles sont situées à la fin de ce chapitre
Note 1: Le pourcentage maximum de la Sortie est atteint à 98 % de l'angle (exemple: 19,6° pou un manipulateur 20°), cette valeur n'est pas ajustable
Grille #15:
Paramètre Valeur Choix disponible (Unité) Défaut
PROTOCOL [BRM;J1939] BRM
BUS FREQUENCY [125;250;500] (kHz) 250
EMISSION PERIOD [20-50] (ms) 20
EMISSION PERIOD IN NEUTRAL [20-50] (ms) 20
Le protocole BRM est un protocole identificateur de 11 bits (2.0A).Le protocole J1939 est un protocole identificateur de 29 bits (2.0B), la télécommande intègre 4 identificateurs:
36/44 Bosch Rexroth AG Hydraulics THE5 RF 29881/09.10
Grilles Signal CAN
Grille #16:
Paramètre Valeur Choix disponible (Unité) Défaut
BJM1_PRIORITY(3 MSB ID 11 bits) [0x2;0x3] 0x2
PDU_SA(8 LSB ID 11 bits) [0x00-0xFF]
0xFE(Doite)0xFF
(Gauche)
Note 1: Avec les valeurs par défaut, l'identificateur est 0x2FE.Note 2: Le protocole BRM utilise les mêmes noms de paramètres que le protocole J1939 (BJM1, PDU_SA)
Grille #17:
Paramètre Valeur Choix disponible Défaut
STD_PGN_ID
– Type 1– Type 2– Type 3
Type 1 Type 2 Type 3BJM 0xFDD6 0xFDD8 0xFDDAEJM 0xFDD7 0xFDD9 0xFDDB
FONCTIONS D'ENTREE– Pas de Fonction (NOF)– Sécurité (DMA)
FONCTIONS DE SORTIE– Axe 1 Direction + (D1P)– Axe 1 Direction – (D1M)– Axe 1 Rupture de neutre (OU1)– Axe 2 Direction + (D2P)– Axe 2 Direction – (D2M)– Axe 2 Rupture de neutre (OU2)– Indicateur de Statut (STA)
NOF
FUNCTION_DIO_2 NOF
FUNCTION_DI_3
FONCTIONS D'ENTREE– Pas de Fonction (NOF)– Sécurité (DMA)
NOF
FUNCTION_DI_4 NOF
FUNCTION_DI_5 NOF
FUNCTION_DI_6 NOF
FUNCTION_DI_7 NOF
Note 1: La fonction Sécurité exigent des réglages additionnels, se référer à la section "Paramètre des Fonctions" pour plus de détails.Note 2: Les statuts de DIO et de DI seront transmient sur le bus dans toutes les conditions et même si aucune fonction n'est sélectionnée.Note 3: La fonction Sécurité peut être assignée à une entrée maximum.
Grille #19:
Paramètre Valeur Choix disponible Défaut
STATUS_MODE – Fault Indicator (FLT)– Ready to work Indicator (RTW) FLT
Grille #20:
Paramètre Valeur Choix disponible Défaut
DEAD_MAN_MODE – Permanent (PER)– Chien de garde (WDG) PER
DEAD_MAN_ TEMPO(Si le mode Chien de garde
est sélectionné)[0-60] (s) 60
38/44 Bosch Rexroth AG Hydraulics THE5 RF 29881/09.10
Caractéristiques et mesures de sécurité du THE5
Précaution d’utilisation du manipulateur THE5 Puissance– Choisir une même tension d’alimentation pour la télécom-
mande THE5 et les solénoïdes qui lui sont connectés, c’est-à-dire solénoïdes 12 V pour application 12 V et solénoïdes 24 V pour application 24 V.
– Effectuer une réinitialisation de la télécommande par cou-pure de l’alimentation après une action corrective consécu-tive à un défaut.
– Prévoir obligatoirement une mise hors circuit de l’alimen- tation des télécommandes et de l’alimentation en pres- sion réduite par bouton d’arrêt d’urgence. Ce dernier doit être parfaitement accessible par l’opérateur. Attention, la coupure d’alimentation des télécommandes annule sans rampe les courants de sortie.
– Ne pas monter de diode de roue libre sur les lignes de puissance du THE5 reliées directement aux solénoïdes car elles sont intégrées dans le manipulateur THE5 Puissance. Si les lignes sont interrompues (par ex. relais), prévoir les circuits de protection adéquats.
Mesures de sécurité pour l’utilisation du THE5Le système qui utilise les signaux de ces manipulateurs doit contrôler la cohérence des signaux (Amplitude, Fréquence) et gérer les modes de défaillance.
Tout défaut détecté entraîne la mise hors circuit des sorties de puissance. La conception du système électro-hydraulique doit assurer un comportement sûr lorsque la consigne devient nulle (par exemple dans le cas de commande de translation).
Attention– Prévoir une mise hors circuit de l’alimentation de l’électro-
nique par un bouton d’arrêt d’urgence. Ce dernier doit être parfaitement accessible par l’opérateur. Dans le cas de commande de translation, un freinage sûr doit être prévu en cas d’arrêt d’urgence.
– Les conducteurs électriques reliés aux capteurs de position (alimentation régulée et sortie proportionnelle) doivent être blindés. Le blindage doit être raccordé à la masse de l’engin par une liaison basse impédance.
– Utiliser un chemin de câblage différent pour les câbles de type signal et ceux de type puissance.
– Lors des opérations de soudure à l’arc sur machine, dé-brancher la batterie d’alimentation et tous les connecteurs de raccordement à l’électronique.
– Prévoir une distance adéquate entre l’électronique et d’éventuelles installations radioélectriques, afin de limiter le champ magnétique vu par la télécommande.
– Ne pas utiliser les télécommandes près d’une source de champ magnétique de fréquence inférieure à 50 Hz et d'amplitude supérieure à 2 mT.
– Ne pas utiliser en atmosphère explosible.– Ne pas soumettre directement au jet d’un dispositif de
lavage sous pression.– équiper les autres inductances de la machine avec des
diodes de roue libre pour éviter la génération de parasites.– Ne pas alimenter les télécommandes lors des phases de
démarrage des moteurs thermiques d’engins mobiles.
Outil de configuration des manipulateurs Signal PWM, CAN et Puissance
Possibilité de réglage et d’affichageL’ensemble des processus de réglage et l’affichage de fonctions, de défauts et de grandeurs spécifiques au système se font au moyen d’un ordinateur PC avec logiciel EMToolBox 1) par l’intermédiaire de l’interface série (Référence DSI: R908250400 ou R908250401).
Connexion de l’interface de commande
L’interface est équipée d’un connecteur Lumberg type RST 4.07.02M.
La machine doit être équipée d’un des connecteurs Lumberg suivants:
1) Le logiciel EMToolBox et ses mises à jour sont fournis gratuitement.
Douille RKF 4.07.0,2M ÉCROU RSKF9 Capuchon ZVF
– Connecteur Lumberg pour fixation sur tableau de bord; Référence DSI: R907213053.
– Connecteur Lumberg type RKT 4.07.2M avec câble de prolongement; Référence DSI: R907213052.
Exemple de matériel à commanderDiagnostic et configuration d'une télécommande équipée d'un connecteur Deutsch 12 contacts:– Logiciel EMToolBox et interface série; Référence DSI R908250400 (1)– Connecteur Lumberg type RKT 4.07.2M avec câble de prolongement; Référence DSI R907213052 (2)– Connecteur machine: DT06–12SA–CE01; Référence DSI R908250513 (3)
123456
121110987
40/44 Bosch Rexroth AG Hydraulics THE5 RF 29881/09.10
4THES5 2THES5RConnection de sortie sur connecteur Deutsch 12 contacts.Référence connecteur télécommande: DT04–12PA–CE01: 12 contacts.Référence connecteur machine: DT06–12SA–CE01; référence DSI: R908250513.
2THESW5RConnection de sortie sur connecteur Deutsch 4 contacts.Référence connecteur télécommande: DT04–04PA–CE01: 4 contacts.Référence connecteur machine: DT06–04SA–CE01; référence DSI: R908250695.
Connecteur clientType Pin Nom
DEUTSCH DT04 04PA-CE01
1 VBAT2 GND3 PWM_OUT_14 ISOK
Légende:VBAT = +V batterieGND = MasseDIG_IN = Entrée Tout ou Rien programmable DIG_IN_OUT = Entrée / sortie Tout ou Rien programmable PWM_OUT = Sortie PWM
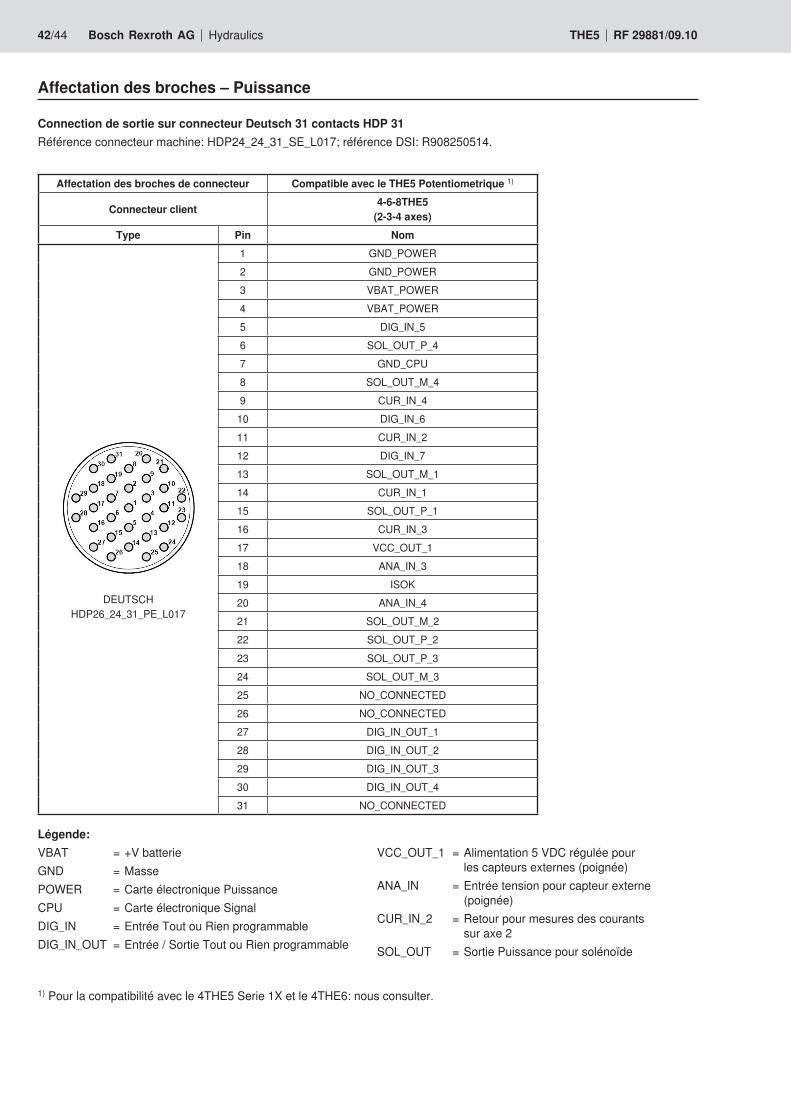
42/44 Bosch Rexroth AG Hydraulics THE5 RF 29881/09.10
Légende:VBAT = +V batterieGND = MassePOWER = Carte électronique PuissanceCPU = Carte électronique SignalDIG_IN = Entrée Tout ou Rien programmableDIG_IN_OUT = Entrée / Sortie Tout ou Rien programmable
Connection de sortie sur connecteur Deutsch 31 contacts HDP 31Référence connecteur machine: HDP24_24_31_SE_L017; référence DSI: R908250514.
Affectation des broches de connecteur Compatible avec le THE5 Potentiometrique 1)
1) Pour la compatibilité avec le 4THE5 Serie 1X et le 4THE6: nous consulter.
VCC_OUT_1 = Alimentation 5 VDC régulée pour les capteurs externes (poignée)ANA_IN = Entrée tension pour capteur externe (poignée)CUR_IN_2 = Retour pour mesures des courants sur axe 2SOL_OUT = Sortie Puissance pour solénoïde







































![Introduction la Programmation Objet : [5pt] …icsam/ipo/documents/transparents06-poo.pdf · Accesseurs/Manipulateurs Masquage et this Constructeurs Objets en java Bien encapsuler](https://static.documents.pub/doc/80x56/5b80fe637f8b9ae97b8b48db/introduction-la-programmation-objet-5pt-ic-samipodocumentstransparents06-poopdf.jpg)










