13
ONLINE IDENTIFICATION AND TRACKING OF SUBSPACES FROM HIGHLY INCOMPLETE INFORMATION Presenter: Ju Gao Laura Balzano, Robert Nowak and Benjamin Recht

ONLINE IDENTIFICATION AND TRACKING OF SUBSPACES FROM HIGHLY INCOMPLETE INFORMATION
Presenter: Ju Gao
Laura Balzano, Robert Nowak and Benjamin Recht
Problem Statement
Given: observations that come from unknown subspace with missing information (e.g. subsampling, compression, noise corruption) Goal: track the underlying signal subspace Remark1: signal subspace might be time varying
Remark2: solution is not unique

Problem Statement Cont’d
1. Update subspace matrix U iteratively using new observation
2. The solution needs to be orthonormal 3. The solution is rotational invariant
Distance between current observation and subspace estimates can be calculated as:

Grassmannian G(n,d) Definition(Grassmannian): the set of all d-dimensional subspace that lies in n-dimensional space is called Grassmannian manifold G(n,d)
Parameterization of Grassmannian manifold: 1. An element S \in G(n,d) can be represented as any n-by-d orthonormal matrices that form the bases for S 2. Quotient space representation V(n,d)/O(d) (Stiefel to orthonormal group)

Solution of Subspace Tracking Problem
Recall the two conditions for the subspace tracking problem
The solution lies in G(n,d)
Gradient descending on G(n,d) gives the solution

Proposed Method
Ordinary gradient:
Remember distance function:

Proposed Method
Ordinary gradient:
Remember distance function:
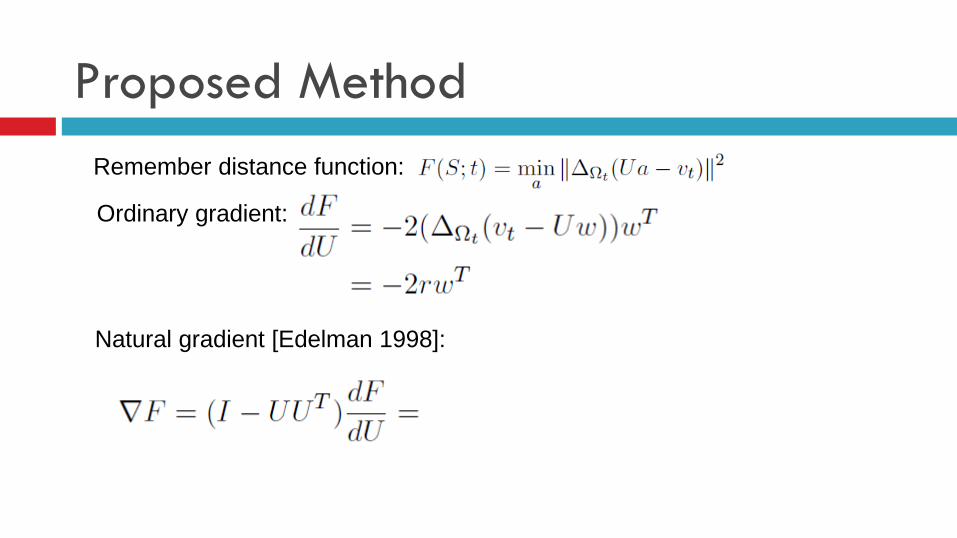
Proposed Method
Ordinary gradient:
Remember distance function:
Natural gradient [Edelman 1998]:
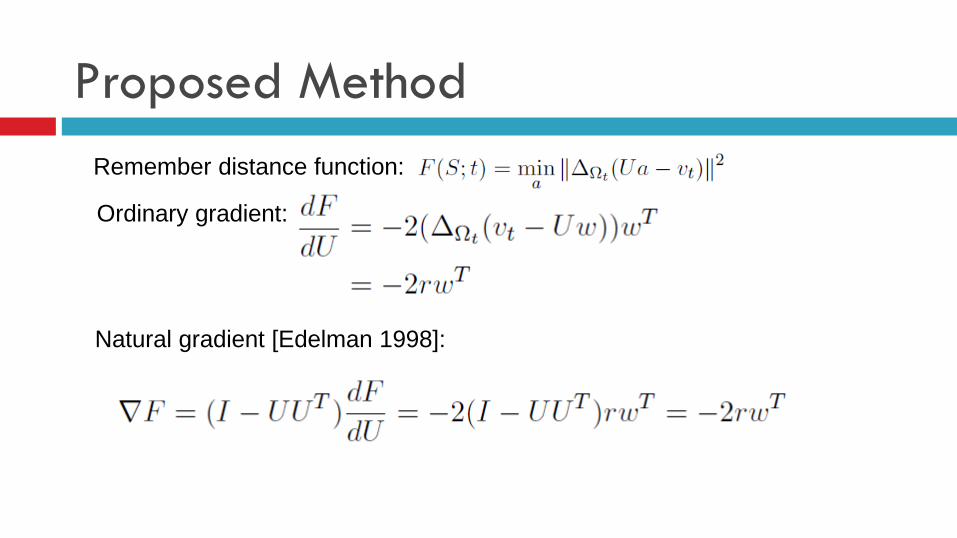
Proposed Method
Ordinary gradient:
Remember distance function:
Natural gradient [Edelman 1998]:

Gradient Descend in Grassmannian [Edelman 1998]:
SVD of natural gradient:
Updating rule:

GROUSE Algorithm
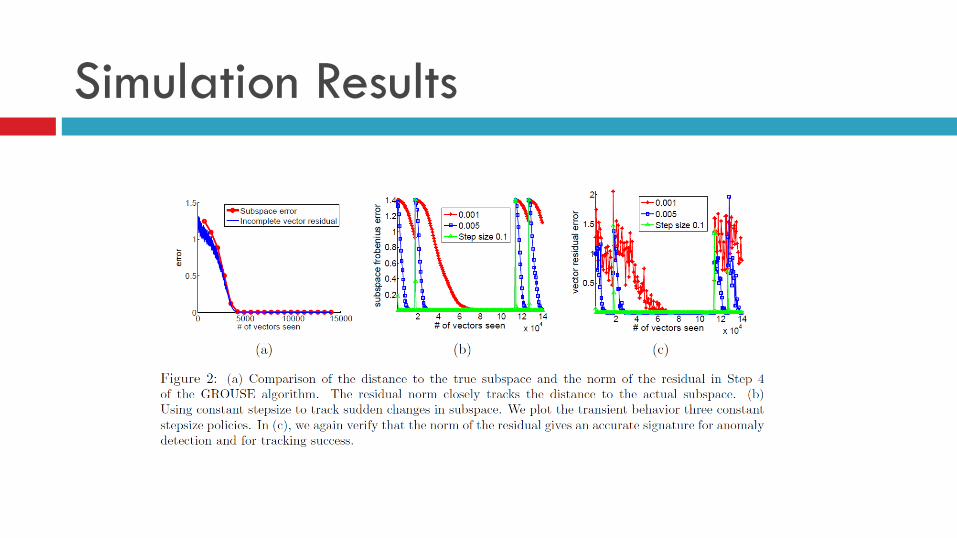
Simulation Results
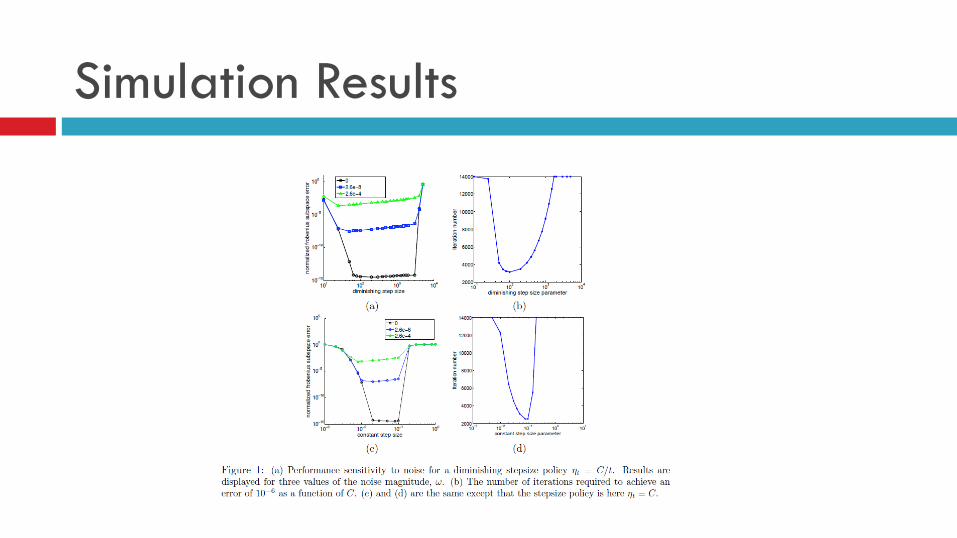
Simulation Results

















