274
Teor´ ıa de los Circuitos I Roberto Gast´on Aragu´ as 20 de marzo de 2012

Teorıa de los Circuitos I
Roberto Gaston Araguas
20 de marzo de 2012

2

Indice general
1. Fundamentos 9
1.1. Circuito idealizado . . . . . . . . . . . . . . . . . . . . . . . . 10
1.2. Ley de Kirchhoff de las corrientes . . . . . . . . . . . . . . . . 10
1.3. Ley de Kirchhoff de las tensiones . . . . . . . . . . . . . . . . 12
1.4. Resistencia - Ley de Ohm . . . . . . . . . . . . . . . . . . . . 13
1.5. Autoinductancia - Ley de Faraday . . . . . . . . . . . . . . . 14
1.6. Capacitancia . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.7. Asociacion equivalente de elementos . . . . . . . . . . . . . . 16
1.7.1. Elementos en serie . . . . . . . . . . . . . . . . . . . . 17
1.7.2. Elementos en paralelo . . . . . . . . . . . . . . . . . . 18
1.8. Potencia y energıa . . . . . . . . . . . . . . . . . . . . . . . . 18
1.8.1. Resistor . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.8.2. Inductor . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.8.3. Capacitor . . . . . . . . . . . . . . . . . . . . . . . . . 20
1.9. Fuentes ideales de tension o corriente . . . . . . . . . . . . . . 20
Ejercitacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2. Senales 31
2.1. Senales de excitacion variables en el tiempo . . . . . . . . . . 31
2.1.1. Senales periodicas . . . . . . . . . . . . . . . . . . . . 31
2.1.2. Senales pseudoperiodicas . . . . . . . . . . . . . . . . . 31
2.1.3. Senales aperiodicas . . . . . . . . . . . . . . . . . . . . 32
2.2. Parametros caracterısticos de una senal variable . . . . . . . . 33
2.3. Valores asociados a la amplitud . . . . . . . . . . . . . . . . . 33
2.3.1. Valor instantaneo . . . . . . . . . . . . . . . . . . . . . 33
2.3.2. Valor maximo . . . . . . . . . . . . . . . . . . . . . . . 33
2.3.3. Valor pico a pico . . . . . . . . . . . . . . . . . . . . . 34
2.3.4. Valor medio . . . . . . . . . . . . . . . . . . . . . . . . 34
2.3.5. Valor medio de modulo o Valor medio absoluto . . . . 35
2.3.6. Valor eficaz . . . . . . . . . . . . . . . . . . . . . . . . 35
2.3.7. Factores caracterısticos de senales periodicas . . . . . 36
2.4. Senales periodicas . . . . . . . . . . . . . . . . . . . . . . . . 37
2.4.1. Rectangular . . . . . . . . . . . . . . . . . . . . . . . . 37
3
4 INDICE GENERAL
2.4.2. Cuadrada . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.4.3. Diente de sierra . . . . . . . . . . . . . . . . . . . . . . 38
2.4.4. Triangular . . . . . . . . . . . . . . . . . . . . . . . . . 38
2.4.5. PWM (Pulse Wide Modulation) . . . . . . . . . . . . 38
2.5. Senales aperiodicas fundamentales . . . . . . . . . . . . . . . 38
2.5.1. Impulso o delta de Dirac . . . . . . . . . . . . . . . . . 38
2.5.2. Escalon unitario . . . . . . . . . . . . . . . . . . . . . 39
2.5.3. Rampa unitaria . . . . . . . . . . . . . . . . . . . . . . 40
2.6. Construccion de senales aperiodicas usando las fundamentales 41
2.6.1. Pulso rectangular . . . . . . . . . . . . . . . . . . . . . 41
2.6.2. Pulso triangular . . . . . . . . . . . . . . . . . . . . . 41
Ejercitacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3. Sistemas de primer y segundo orden 49
3.1. Sistemas de primer orden . . . . . . . . . . . . . . . . . . . . 49
3.1.1. Circuito sin fuente . . . . . . . . . . . . . . . . . . . . 49
3.1.2. Circuito RL sin fuente . . . . . . . . . . . . . . . . . . 50
3.1.3. Circuito RC sin fuente . . . . . . . . . . . . . . . . . . 52
3.2. Constante de tiempo τ . . . . . . . . . . . . . . . . . . . . . . 54
3.2.1. Potencia y energıa . . . . . . . . . . . . . . . . . . . . 56
3.3. Respuesta a una fuente constante . . . . . . . . . . . . . . . . 57
3.3.1. Circuito RC con fuente constante . . . . . . . . . . . . 57
3.4. Sistemas lineales . . . . . . . . . . . . . . . . . . . . . . . . . 61
3.5. Resolucion por superposicion . . . . . . . . . . . . . . . . . . 62
3.6. Respuesta natural mas forzada . . . . . . . . . . . . . . . . . 63
3.7. Respuesta a una fuente no constante . . . . . . . . . . . . . . 64
3.8. Alimentacion con fuente sinusoidal. Corriente alterna . . . . . 65
3.9. Sistemas de segundo orden . . . . . . . . . . . . . . . . . . . . 68
3.9.1. Solucion natural . . . . . . . . . . . . . . . . . . . . . 70
3.9.2. Condicions iniciales . . . . . . . . . . . . . . . . . . . 76
3.9.3. Solucion forzada . . . . . . . . . . . . . . . . . . . . . 77
3.9.4. Soluciones linealmente dependientes . . . . . . . . . . 78
3.10. Sistemas de orden n . . . . . . . . . . . . . . . . . . . . . . . 79
3.10.1. Solucion natural . . . . . . . . . . . . . . . . . . . . . 79
Ejercitacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4. Transformada de Laplace 101
4.1. Transformada de Laplace . . . . . . . . . . . . . . . . . . . . 101
4.1.1. Definicion . . . . . . . . . . . . . . . . . . . . . . . . . 101
4.1.2. Propiedades de la transformada . . . . . . . . . . . . . 103
4.2. Aplicacion a la resolucion de circuitos . . . . . . . . . . . . . 108
4.2.1. Funcion de transferencia . . . . . . . . . . . . . . . . . 111
4.2.2. Circuito equivalente de Laplace . . . . . . . . . . . . . 113
4.2.3. Teorema del valor inicial . . . . . . . . . . . . . . . . . 116

INDICE GENERAL 5
4.2.4. Teorema del valor final . . . . . . . . . . . . . . . . . . 117
4.3. Antitransformada o transformada inversa de Laplace . . . . . 118
4.3.1. Desarrollo en fracciones parciales . . . . . . . . . . . . 119
4.3.2. Formula de Heaviside . . . . . . . . . . . . . . . . . . 121
4.4. Respuesta al impulso . . . . . . . . . . . . . . . . . . . . . . . 122
4.5. Teorema de convolucion . . . . . . . . . . . . . . . . . . . . . 124
Ejercitacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
5. Metodo fasorial 145
5.1. Calculo fasorial . . . . . . . . . . . . . . . . . . . . . . . . . . 145
5.1.1. Fundamentacion . . . . . . . . . . . . . . . . . . . . . 145
5.1.2. Fasor y fasor armonico . . . . . . . . . . . . . . . . . . 146
5.2. Relacion tension-corriente fasorial . . . . . . . . . . . . . . . . 147
5.2.1. Resistor . . . . . . . . . . . . . . . . . . . . . . . . . . 148
5.2.2. Inductor . . . . . . . . . . . . . . . . . . . . . . . . . . 149
5.2.3. Capacitor . . . . . . . . . . . . . . . . . . . . . . . . . 150
5.3. Resolucion de circuitos usando fasores . . . . . . . . . . . . . 150
5.4. Impedancia y admitancia compleja . . . . . . . . . . . . . . . 152
5.4.1. Conversion impedancia-admitancia . . . . . . . . . . . 154
5.4.2. Asociacion de impedancias . . . . . . . . . . . . . . . 154
5.4.3. Diagrama fasorial . . . . . . . . . . . . . . . . . . . . . 154
5.5. Potencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
5.5.1. Potencia instantanea . . . . . . . . . . . . . . . . . . . 155
5.5.2. Potencia activa, reactiva y aparente . . . . . . . . . . 158
5.5.3. Triangulo de potencias . . . . . . . . . . . . . . . . . . 159
5.5.4. Potencia compleja S . . . . . . . . . . . . . . . . . . . 160
5.5.5. Factor de potencia . . . . . . . . . . . . . . . . . . . . 160
5.5.6. Correccion del factor de potencia . . . . . . . . . . . . 161
5.6. Senales poliarmonicas . . . . . . . . . . . . . . . . . . . . . . 162
5.6.1. Desarrollo de senales en serie de Fourier . . . . . . . . 162
5.6.2. Serie en senos y cosenos . . . . . . . . . . . . . . . . . 162
5.6.3. Serie senoidal . . . . . . . . . . . . . . . . . . . . . . . 163
5.6.4. Serie compleja . . . . . . . . . . . . . . . . . . . . . . 164
Ejercitacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
6. Resolucion sistematica de circuitos 187
6.1. Metodo de las corrientes en las mallas . . . . . . . . . . . . . 187
6.2. Metodo de las tensiones en los nudos . . . . . . . . . . . . . . 188
Ejercitacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 190
7. Teoremas circuitales 199
7.1. Teorema de Thevenin . . . . . . . . . . . . . . . . . . . . . . 199
7.2. Teorema de sustitucion, o teorema de Miller . . . . . . . . . . 201
7.3. Teorema de compensacion . . . . . . . . . . . . . . . . . . . . 201
6 INDICE GENERAL
7.4. Teorema de reciprocidad . . . . . . . . . . . . . . . . . . . . . 202
7.5. Teorema de Millman . . . . . . . . . . . . . . . . . . . . . . . 203
7.6. Teorema de transferencia de potencia maxima . . . . . . . . . 204
7.6.1. Carga resistiva pura . . . . . . . . . . . . . . . . . . . 204
7.6.2. Carga generica . . . . . . . . . . . . . . . . . . . . . . 204
7.6.3. Carga generica de reactancia fja . . . . . . . . . . . . 205
7.7. Transformacion estrella - triangulo. Teorema de Rosen . . . . 205
Ejercitacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 206
8. Resonancia 215
8.1. Resonancia en un circuito serie RLC simple . . . . . . . . . . 215
8.1.1. Variacion de la impedancia . . . . . . . . . . . . . . . 216
8.1.2. Analisis de admitancias . . . . . . . . . . . . . . . . . 217
8.2. Sobretension en circuitos serie resonantes . . . . . . . . . . . 218
8.3. Ancho de banda . . . . . . . . . . . . . . . . . . . . . . . . . 220
8.3.1. Circuito RLC serie . . . . . . . . . . . . . . . . . . . . 221
8.4. Factor Q0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223
8.5. Resonancia de un circuito paralelo de 2 ramas . . . . . . . . . 225
8.6. Lugar geometrico . . . . . . . . . . . . . . . . . . . . . . . . . 226
8.6.1. Elementos en serie . . . . . . . . . . . . . . . . . . . . 227
Ejercitacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 228
9. Circuitos acoplados inductivamente 235
9.1. Autoinduccion e induccion mutua . . . . . . . . . . . . . . . . 235
Ejercitacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 237
10.Sistemas polifasicos 247
10.1. Sistemas polifasicos . . . . . . . . . . . . . . . . . . . . . . . . 247
10.2. Sistema bifasico . . . . . . . . . . . . . . . . . . . . . . . . . . 247
10.3. Sistema trifasico . . . . . . . . . . . . . . . . . . . . . . . . . 249
10.3.1. Generador en configuracion estrella . . . . . . . . . . . 249
10.3.2. Generador en configuracion triangulo . . . . . . . . . . 252
10.4. Resolucion de sistemas trifasicos perfectos . . . . . . . . . . . 253
10.4.1. Cargas en configuracion estrella . . . . . . . . . . . . . 253
10.4.2. Cargas en configuracion triangulo . . . . . . . . . . . . 254
10.4.3. Calculo de potencias . . . . . . . . . . . . . . . . . . . 256
10.5. Resolucion de sistemas trifasicos deformados . . . . . . . . . . 259
10.5.1. Cargas desbalanceadas en estrella con cuatro conductores259
10.5.2. Cargas desbalanceadas en estrella con tres conductores 259
10.5.3. Cargas desbalanceadas en configuracion triangulo . . . 259
10.5.4. Potencia en cargas desbalanceadas . . . . . . . . . . . 259
Ejercitacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 260
INDICE GENERAL 7
11.Aplicaciones reales 265Ejercitacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 266
A. Ecuaciones diferenciales 267
B. Uso basico de Maxima 269B.1. Maxima/wxMaxima . . . . . . . . . . . . . . . . . . . . . . . 269
B.1.1. La intefaz grafica wxMaxima . . . . . . . . . . . . . . 269B.2. Operaciones con Maxima . . . . . . . . . . . . . . . . . . . . 270
B.2.1. Ecuaciones diferenciales . . . . . . . . . . . . . . . . . 273

8 INDICE GENERAL

Capıtulo 1
Fundamentos
Cualquier problema electrico que involucre senales que varıan en el tiem-po puede ser conpletamente resuelto usando la teorıa electromagnetica des-cripta por las ecuaciones de Maxwell. Esta teorıa analiza los campos electri-cos y magneticos del problema, y la disposicion geometrica de sus partescomponentes.
Teniendo en cuenta las siguientes restricciones:
1. las dimensiones del circuito son suficientemente pequenas en compa-racion con la longitud de onda λ de las senales, y
2. los efectos de disipacion y almacenamiento de energıa en forma de cam-po electrico y magnetico que se produce a lo largo de todo el circuitopueden ser reproducidos en elementos idealizados de dos terminales,llamados resistencia, inductancia y capacitancia, que concentran di-chos efectos
entonces se puede aplicar la llamada Teorıa de los circuitos para su analisisy resolucion.
La primera de estas condiciones implica que las tensiones y corrientesinstantaneas a lo largo de un cable puedan ser consideradas constantes pa-ra un determinado t, es decir que no haya diferencia debido al tiempo depropagacion de la onda electromagnetica en diferentes puntos de la lınea.Entonces los parametros se pueden aproximar
v(x, t) ≈ v(t)
i(x, t) ≈ i(t)
Para un sistema con una frecuencia de 50Hz por ejemplo, puede aplicarseel metodo con gran exactitud a circuitos de varios kilometros de longitud.En cambio a frecuencias del orden de los GHz, se debe utilizar la teorıaelectromagnetica cuando la dimension del circuito supera el centımetro.
La segunda condicion es una consecuencia directa de la primera, ya quesi la senal varia lentamente respecto a las dimensiones fısicas del circuito
9
10 CAPITULO 1. FUNDAMENTOS
los efectos de almacenamiento y disipacion de energıa pueden considerarseagrupados sin alterar el comportamiento del sistema.
1.1. Circuito idealizado
La Teorıa de los circuitos consiste en la aplicacion de una serie de leyes,obtenidas de experimentos realizados sobre circuitos reales a lo largo de lahistoria, que relacionan las magnitudes de tension y corriente en cada unode los elementos constituyentes de un circuito. Los parametros distribuidosa lo largo del circuito real son reemplazados por resistencias, inductores ycapacitores con parametros concentrados, las conexiones se realizan con ca-bles ideales y las fuentes de alimentacion se reemplazan por fuentes idealesde tension o corriente. Estos elementos representan todos los posibles com-portamientos de la energıa en un circuito. El resistor respresenta la parte dela energıa que se disipa al medio en forma irreversible, el inductor representala energıa que se almacena en forma de campo magnetico y el capacitor laalmacenada en forma de campo electrico. Las fuentes son las que introducenla energıa al circuito.
Para comenzar a estudiar los circuitos y las leyes que se utilizan enla Teorıa de los circuitos, es necesario formular las siguientes definicionesrespecto de la topologıa de los circuitos:
Rama porcion de circuito comprendido entre dos puntos de conexion oterminales.
Nudo o nodo punto donde concurren varias ramas. Si concurren tres ra-mas o mas se llama nudo principal.
Malla o lazo cualquier trayectoria cerrada dentro del circuito que resultede recorrerlo en un mismo sentido regresando al punto de partida sinpasar dos veces por la misma rama.
1.2. Ley de Kirchhoff de las corrientes
La ley de Kirchhoff de las corrientes (LKI), tambien llamada ley de losnudos, afirma que la sumatoria algebraica de las corrientes en un nudo esigual a cero
n∑
k=1
ik(t) = 0 (1.1)
entendiendose por suma algebraica a la suma de cada parametro con surespectivo signo.
Para representar una corriente se necesita un valor de intensidad i masuna referencia que especifica su sentido de circulacion, como se muestra en

1.2. LEY DE KIRCHHOFF DE LAS CORRIENTES 11
la fig. 1.1. La flecha indica el sentido positivo instantaneo que tendra lacorriente en un tiempo t dado, entonces una corriente que circula en elsentido de la flecha se la representa con un valor de intensidad i positivo,y una corriente que circula en sentido inverso se representa con un valor deintensidad negativo (i < 0).
i1
i2
i3
i4
R
Figura 1.1: Ley de Kirchhoff de las corrientes
Luego, para realizar una sumatoria algebraica sobre un nudo se debeasignar un signo a cada corriente que indique si esta es entrante o salienteen el nudo1. Aplicando la LKI al nudo de la fig. 1.1 y tomando positivas alas corrientes entrantes al nudo tenemos:
i1 − i2 + i3 + i4 = 0
donde si por ejemplo i1 = 3A, i2 = 5A e i3 = 3A, entonces i4 debera sernegativa
i4 = −3 + 5− 3 = −1A
lo que significa que por la rama 4 circula una corriente de 1A de sentidocontrario al indicado por la flecha.
La eleccion de los sentidos de referencias de las corrientes es arbitra-ria, pero debe tenerse cuidado de elegirlos al principio del analisis y luegorespetarlos durante todo el desarrollo.
i1
i2
i3
i4
R
Figura 1.2: Ley de Kirchhoff de las corrientes
En efecto, si para el mismo problema elegimos las referencias como en la
1No debe confundirse el signo asignado a cada corriente para realizar la sumatoriaalgebraica con el signo propio de cada corriente, el cual indica si su sentido coincide o nocon el de referencia.

12 CAPITULO 1. FUNDAMENTOS
fig 1.2 la ecuacion de equilibrio del nudo sera2
i1 − i2 − i3 − i4 = 0
luego, al tratarse de las mismas corrientes reales, la i3 valdra −3A debidoal cambio de referencia, y la i4 sera
i4 = 3− 5− (−3) = 1A
de donde i4 = −i4.
1.3. Ley de Kirchhoff de las tensiones
La ley de Kirchhoff de las tensiones (LKV), tambien llamada ley de lasmallas, afirma que la suma algebraica de todas las fuerzas electromotricesaplicadas a lo largo de una malla es igual a la suma algebraica de todas lascaıdas de tension en los elementos pasivos de esta malla. Se puede enunciar deforma mas general sin diferenciar entre fuerzas electromotrices y elementospasivos diciendo que la suma algebraica de las diferencias de potencial a lolargo de una malla es cero
n∑
k=1
vk(t) = 0 (1.2)
Recorriendo la malla de la fig. 1.3 en el sentido de la corriente i a par-tir del generador v1 y tomando como positivas las subidas de tension3, laecuacion de circuito es
v1 − vR1 − vR2 − v2 = 0
v1 v2
vR1 vR2
i
Figura 1.3: Ley de Kirchhoff de las tensiones
Si por ejemplo se conocen las tensiones v1 = 10V , vR1 = 4V y vR2 = 16V ,despejando v2 de 1.3 se tiene
v2 = 10V − 4V − 16V = −10V2Notese que al cambiar las referencias de las variables se eligen nuevos nombres de fun-
cion (i3 6= i3, etc.) para remarcar que se tratan de diferentes funciones aunque representenel mismo parametro fısico
3La asigancion de un signo determinado para las subidas o caıdas de tension es arbi-trario y no altera la solucion del problema, como se vera mas adelante

1.4. RESISTENCIA - LEY DE OHM 13
el signo menos indica que el generador v2 tiene polaridad opuesta a la indi-cada por la referencia.
Si se desea recorrer la malla en sentido contrario, o mas aun, si se tomaarbitrariamente la referencia de la tension en el segundo elemento (R2) enforma contraria al caso anterior (ahora vR2), obviamente que se debe arribaral mismo resultado. En efecto, sean las referencias como en la fig. 1.4, lanueva ecuacion de equilibrio de la malla sera
− v1 + v2 − vR2 + vR1 = 0 (1.3)
donde por tratarse del mismo problema, los valores de tension son v1 = 10V ,vR1 = 4V y vR2 = −16V
v1 v2
vR1 vR2
i
Figura 1.4: Ley de Kirchhoff de las tensiones
Despejando v2 de 1.3 se tiene
v2 = 10V + (−16V )− 4V = −10V
que coincide con el resultado obtenido anteriormente.
1.4. Resistencia - Ley de Ohm
El fısico aleman Georg Ohm publico en 1826 que para casi todos losconductores ensayados la caıda de tension entre los extremos era mayorcuando mayor era la longitud del cable, y que a su vez era proporcional a lacorriente, dando lugar a la conocida Ley de Ohm4.
Originalmente fue formulada en su version vectorial, que relaciona ladensidad de corriente J con el campo electrico E mediante la conductividadσ del material
J = σE (1.4)
Su forma simplificada para el uso en Teorıa de los circuitos es
vR = R iR (1.5)
donde R es el elemento concentrado que representa el intercambio (disipa-cion) de energıa con el medio en un circuito idealizado.
4Aunque se ha demostrado que en realidad esta ecuacion fue descubierta 46 anos antesen Inglaterra por Henry Cavendish.

14 CAPITULO 1. FUNDAMENTOS
Esta ley es valida para todos los metales, el factor de proporcionalidadR se llama resistencia, se mide en ohms [Ω] y depende de una propiedaddel material llamada resistividad ρ (inversa de la conductividad σ), de sulongitud ℓ y de su seccion A
R = ρℓ
A(1.6)
La ecuacion (1.5) nos dice que a mayor corriente, mayor caıda de tensionen R, es decir que la corriente debe atravesar al resistor entrando por elextremo de mayor potencial para que esta igualdad sea valida, como semuestra en la figura 1.5. Si una corriente i atraviesa al resistor desde suextremo de menor potencial, es decir que iR = −iR, entonces la relaciontension corriente con iR sera
iR = −iR = −vRR
(1.7)
1.5. Autoinductancia - Ley de Faraday
El cientıfico estadounidense Joseph Henry mientras experimentaba conelectroimanes noto que al circular corriente electrica por estos circuitos seproducıa un fenomeno similar a la cantidad de movimiento mecanico de loscuerpos en velocidad (p = Masa× vel.), es decir que esa corriente electricatendıa a seguir circulando de forma constante en el tiempo. Este fenomenofue denominado momento electrocinetico y se lo represento con la letra λ
λ = L iL (1.8)
la constante de proporcionalidad L, al igual que la masa M , es una carac-terıstica del circuito. Se denomina autoinductancia y su unidad es el Henrio[H].
Del mismo modo que para modificar la cantidad de movimiento p de uncuerpo se debe aplicar una fuerza F , Henry encontro que para modificar elmomento electrocinetico se debe aplicar una diferencia de potencial, es decir
vL =dλ
dt=
d(L iL)
dt(1.9)
donde si L es invariante en el tiempo
vL = LdiLdt
(1.10)
En forma independiente, en 1831 Michael Faraday desarrollo en Inglate-rra su conocida teorıa de la induccion electromagnetica, en la cual utilizandoel concepto de campo magnetico y lıneas de flujo descubrio que al someterun conductor en un campo variable, o al cortar con este las lıneas de flujo

1.6. CAPACITANCIA 15
del campo, se origina una circulacion de corriente. Por otro lado HeinrichLenz comprobo que la corriente tiende a mantener este flujo Φ, es decir quese origina una f.e.m. inducida de signo opuesto a la variacion de flujo
E = −dΦ
dt(1.11)
por lo tanto el voltaje inducido, opuesto a la f.e.m. inducida sera
vL(= −E) =dΦ
dt(1.12)
En el caso que el flujo magnetico sea producido por un arrollamiento de Nespiras, la ecuacion anterior queda mutliplicada por N
vL = NdΦ
dt(1.13)
Igualando los voltajes deducidos por Henry (ec. 1.10) y Faraday (ec.1.13) se puede relacionar el momento electrocinetico con el flujo magnetico
vL = LdiLdt
= NdΦ
dt
L iL = NΦ ⇒ L =NΦ
iL(1.14)
En la figura 1.5 se muestra la relacion tension corriente en un inductorsegun (1.10), es decir con la corriente entrante por el extremo de mayorpotencial. Por el contrario, si una corriente iL atraviesa al inductor entrandopor el extremo de menor potencial, tal que iL = −iL, entonces la relaciontension-corriente sera
vL = −LdiLdt
(1.15)
Segun la (1.10), una variacion de corriente en el inductor provoca en susextremos una tension vL proporcional a esta variacion, es decir que cuandomas brusca sea la variacion mayor sera la tension inducida vL. Esto significaque la corriente que atraviesa un inductor no puede presentar discontinui-dades, pues una discontinuidad en la corriente inducirıa una tension infinitaen el elemento. Esta caracterıstica propia de los inductores se conoce comocondicion de continuidad de corriente en el inductor.
1.6. Capacitancia
El almacenamiento de energıa en forma de campo electrico fue el efectomas tempranamente observado, el experimento se conoce como “botella deLeyden” y fue realizado en el ano 1746. Se descubrio que aislando dos placas

16 CAPITULO 1. FUNDAMENTOS
metalicas, una en el interior y otra en el exterior de la botella, se podıanalmacenar cargas electricas, lo que dio lugar al primer capacitor.
Mas tarde se encontro que la cantidad de cargas acumuladas era propor-cional a la diferencia de potencial entre las placas
q = CvC (1.16)
La constande C se llama capacitancia y se mide en faradios (F ).Recordando que la corriente electrica i es igual a la variacion de car-
gas por tiempo, derivando (1.16) respecto al tiempo obtenemos la relaciontension - corriente en un capacitor
iC = CdvCdt
(1.17)
donde C es constante. En la figura 1.5 se muestra la (1.17) con sus referen-cias. Si una corriente iC = −iC recorre el capacitor entrando por el extremode menor potencial entonces la relacion tension corriente sera
iC = −C dvCdt
(1.18)
La relacion tension corriente (1.17) indica que una corriente en el ca-pacitor provocara una variacion de tension en sus bornes, que sera mayorcuanto mayor sea dicha corriente. Si se sigue incrementando la corriente lavariacion de tension sera cada vez mayor, pero para valores reales de co-rrientes la variacion sera siempre finita. Por lo tanto la tension a bornes delcapacitor no puede ser discontinua, pues esto implica una corriente infinita,esto se conoce como condicion de continuidad de tension en el capacitor.
resistor R inductor L capacitor C
vR vL vCiR iL iC
vR = R iR vL = LdiLdt iC = C dvC
dt
Figura 1.5: Relacion tension - corriente en los elementos R, L y C
1.7. Asociacion equivalente de elementos
Muchas veces aparecen en los circuitos ideales varios elementos de unmismo tipo que, aplicando las leyes de Kirchhoff, pueden asociarse en ununico elemento de valor equivalente, de forma que no se modifiquen losparametros electricos en el resto del circuito.

1.7. ASOCIACION EQUIVALENTE DE ELEMENTOS 17
1.7.1. Elementos en serie
Supongamos que una corriente i(t) circula por una rama de un circuitoatravesando una serie de resistores Ri e inductores Lj . La suma algebraicade las tensiones de cada elemento sera igual a la tension entre los extremosde la rama, es decir
vrama = vR1+ vR2
+ vL1+ vL2
+ vR3+ · · ·+ vRN
+ vLM
vrama =N∑
i=1
vRi+
M∑
j=1
vLj(1.19)
luego, suponiendo todas caıdas de tension para la corriente i(t), la ecuacionanterior se puede poner como
vrama =
(N∑
i=1
Ri
)i(t) +
M∑
j=1
Lj
di(t)
dt
vrama = Reqi(t) + Leqdi(t)
dt(1.20)
puesto que la corriente i(t) es comun a todos los elementos por lo que puedesacarse como factor comun de la sumatoria. Es decir que un conjunto deresistores (o de inductores) en serie puede ser reemplazado por un unicoelemento de valor equivalente sin alterar los demas parametros del circuito.El valor equivalente es igual a la suma de los valores de todos los elementosde la rama.
Req =N∑
i=1
Ri (1.21)
Leq =M∑
j=1
Lj (1.22)
Consideremos ahora un conjunto de capacitores Ck conectados todos enserie que son atravesados por una corriente i(t). Analogamente podemosexpresar la sumatoria de las caıdas de tension de la rama de la siguientemanera
vrama =N∑
k=1
vCk
vrama =N∑
k=1
(1
Ck
∫i(t)dt
)=
(N∑
k=1
1
Ck
)∫i(t)dt (1.23)
vrama =1
Ceq
∫i(t)dt (1.24)

18 CAPITULO 1. FUNDAMENTOS
es decir que el conjunto de capacitores puede ser reemplazado por uno equi-valente tal que
1
Ceq=
N∑
k=1
1
Ck
(1.25)
sin modificar los parametros electricos de los demas componentes del circui-to.
1.7.2. Elementos en paralelo
Por medio de un analisis similar al del parrafo anterior se pueden re-emplazar varios elementos conectados en paralelo por uno equivalente devalor
1
Req=
N∑
i=1
1
Ri(1.26)
para el caso de resistores, o
1
Leq=
N∑
i=1
1
Li(1.27)
para el caso de inductores, o
Ceq =N∑
i=1
Ci (1.28)
para el caso de capacitores asociados en paralelo.
1.8. Potencia y energıa
En un elemento o circuito en general, con una tension v(t) en sus bornesy una corriente i(t) circulando por el, la potencia electrica p(t) en el elementose define como
p(t) = v(t)i(t) (1.29)
su unidad de medida es el vatio, [W ], y representa la velocidad de cambiode la energıa. Si p(t) > 0 entonces la energıa en el circutio o elemento decircutio esta aumentando, si p(t) < 0 la energıa esta disminuyendo.
La integral de esta potencia instantanea es la energıa w(t), almacenadao disipada en el elemento segun corresponda
w(t) =
∫p(t)dt (1.30)
cuya unidad de medida es el joule [J ], equivalente a [w.s].

1.8. POTENCIA Y ENERGIA 19
1.8.1. Resistor
En un elemento resistivo puro, la potencia instantanea sera
pR(t) = vR(t)iR(t) = Ri2R(t) =v2R(t)
R(1.31)
como el valor de R es siempre mayor a cero, la potencia instantanea essiempre positiva ya que depende de la tension o la corriente al cuadrado.Esto significa que la variacion de energıa en un resistor es siempre positiva (lafuncion disipacion de energıa es monotona creciente), es decir que la energıaen el elemento siempre aumenta debido a que se trata de un elemento quedisipa energıa al medio
wR(t) =
∫pR(t)dt = R
∫i2R(t)dt =
∫v2R(t)
Rdt (1.32)
Por ejemplo, si se trata de una corriente de valor constante iR(t) = I0,la potencia y energıa instantaneas seran
pR(t) = RI20
wR(t) = RI20 t
que como se ve la energıa crece con t.
1.8.2. Inductor
Para un elemento inductivo puro la potencia instantanea sera
pL(t) = vL(t)iL(t) = LiL(t)diL(t)
dt(1.33)
en general la corriente iL(t) y su derivada pueden tener disinto signo, enton-ces habra situaciones en las que la potencia instantanea sera negativa. Estesigno negativo de la potencia instantanea representa una disminucion en laenergıa acumulada en el elemento.
La energıa instantanea en un inductor sera
wL(t) =
∫pL(t)dt = L
∫iL(t)diL(t) =
1
2LiL(t)
2 (1.34)
es claro que la energıa acumulada no puede tomar valores menores a cero,pero a diferencia de la energıa disipada por un resistor, esta esta limitada porlos valores maximo y mınimo que pueda tomar el cuadrado de la corriente.Para un valor maximo de corriente ILmax la energıa acumulada en el inductortomara su valor maximo y sera igual a
WLmax =1
2LI2Lmax
(1.35)

20 CAPITULO 1. FUNDAMENTOS
Si por ejemplo elegimos5 iL(t) = ILmaxe− t
τ tendremos
pL(t) = −1
τLI2Lmax
e−tτ
wL(t) =1
2LI2Lmax
e−2tτ
tomando ambas su valor maximo en t = 0
PLmax = −1
τLI2Lmax
WLmax =1
2LI2Lmax
Mas adelante, en la unidad que estudia los sistemas de primer orden, volve-remos sobre este analsis con mas detalle.
1.8.3. Capacitor
Para el caso de un capacitor la situacion es similar a la del inductor, laenergıa almacenada instantanea no puede ser menor a cero pero si puede au-mentar y disminuir, consecuentemente la potencia instantanea podra tomarvalores positivos y negativos. Las ecuaciones son
pC(t) = vC(t)iC(t) = CvC(t)dvC(t)
dt(1.36)
wC(t) =
∫pC(t)dt =
1
2CvC(t)
2 (1.37)
WCmax =1
2CV 2
Cmax(1.38)
1.9. Fuentes ideales de tension o corriente
Introduciremos por ultimo el concepto de fuentes ideales. Una fuenteideal es un elemento capaz de proporcionar una tension o corriente deter-minada, independiente de la carga. En cambio, una fuente real proporcionauna tension o corriente de salida que depende de la carga que este alimen-tando. Esto se debe a que la corriente de salida debe atravesar la resistenciainterna de la fuente, provocando una caıda de tension que se resta a la f.e.m.de la fuente.
Una fuente real puede ser representada entonces por una fuente ideal masuna resistencia conocida como resistencia interna o resistencia de salida. Estaresistencia generalmente es considerada como parte del circuito de carga ypor ende no se la dibuja asociada a la fuente.
Segun sea el valor de la carga respecto de la resistencia de salida la fuentereal se comporta manteniendo cuasi-constante la tension o la corriente desalida
5Como veremos mas adelante esta es una corriente muy comunmente encontrada enun inductor ya que se trata de la respuesta natural de un sistema de primer orden.

1.9. FUENTES IDEALES DE TENSION O CORRIENTE 21
Fuentereal RcRc Rc
Ri
Io IoIo
VoVoVcVc Vc≡ ≈
Ri << Rc
Figura 1.6: Fuente de tension ideal
Si la carga es mucho mayor a la resistencia de salida tal que (fig. 1.6)
Io =Vo
Ri +Rc
Vc = RcIo = VoRc
Ri +Rc≈ Vo (1.39)
entonces la tension aplicada se mantiene aproximadamente constanteante variaciones de la carga. Este comportamiento esta representadopor una fuente de tension ideal cuyo sımbolo se ve en la figura 1.6
Si la resistencia de salida es mucho mayor a la carga que se esta ali-mentando tal que
Io =Vo
Ri +Rc≈ Vo
Ri(1.40)
entonces la corriente de salida permanecera aproximadamente cons-tante ante las variaciones de carga. Esto se idealiza con una fuente decorriente, cuyo sımbolo puede verse en la figura 1.7
Fuentereal RcRc Rc
Ri
Io Io
Io
IoVcVc VcVo≡ ≈
Ri >> Rc
Figura 1.7: Fuente de corriente ideal

22 CAPITULO 1. FUNDAMENTOS
Ejercitacion
1. Aplicar la LKV segun las distintas referencias que se muestran en lafig. 1.8. Calcular para cada caso el valor de la tension vR2
i(t)i(t) i(t)10V10V10V 20V20V20V
10Ω10Ω10Ω
20Ω20Ω20Ω
vR1vR1 vR1
vR2vR2vR2
Figura 1.8: Plantear LKV y encontrar vR2
2. Aplicar la LKV y calcular la tension vR3 segun la referencia que semuestra en el circuito de la fig. 1.9.
10V 100Ω
100Ω
20Ω vR3
Figura 1.9: Plantear LKV y encontrar vR3(t)
3. Aplicando LKI calcular la corriente i3 segun la referencia que se indicaen el circuito de la fig. 1.10.
0,5A
i3
5Ω
12Ω 8Ω
Figura 1.10: Planteando LKI encontrar la corriente i3
4. Por un circuito serie RL con R = 5Ω y L = 0, 004H circula unacorriente como la de la figura 1.11. Calcular y graficar vR(t) y vL(t)
5. La tension representada por la fig. 1.12 se aplica a un circuito RLparalelo de R = 4Ω y L = 10mH. Calcular y graficar la corriente totali(t).
6. Una rama RLC, con R = 2Ω, L = 2mH y C = 500µF , es atravesadapor una corriente cuya forma se representa en la fig. 1.13. Calcular ygraficar las tensiones de cada elemento.

1.9. FUENTES IDEALES DE TENSION O CORRIENTE 23
5
-5
2 4 6 8 t[ms]
i(t)[A]
Figura 1.11: Corriente circulante por el circuito RL serie
10
20
-10
-20
5 10 15 t[ms]
v(t)[V ]
Figura 1.12: Tension aplicada al circuito RL paralelo
10
-10
1 2 3 4 5 6 t[ms]
i(t)[A]
Figura 1.13: Corriente de rama
7. La caıda de tension en el elemento inductivo del circuito serie de lafig. 1.14a es como se muestra en el grafico 1.14b. Siendo la i(0) = −5Agraficar por lo menos un ciclo de la corriente total i(t), de la caıda enla resistencia vR(t) y de la tension del generador vT (t).
8. Por una rama RC circula una corriente como la de la figura 1.15.Graficar las tensiones de cada elemento considerando que el capacitorse encuentra inicialmente descargado.

24 CAPITULO 1. FUNDAMENTOS
vT (t) vL(t)i(t)
5Ω
10H
(a)
100
-100
1 2 3 t[s]
vL(t)[V ]
(b)
Figura 1.14
1 2 3 4 t
i(t)
Figura 1.15: Corriente variable circulante por una rama RC
Soluciones
Ejercicio 4 Planteo y resolucion utilizando Maxima
Para describir la corriente i(t) definida por tramo que circula por elcircuito RL serie
i(t) =
52ms
t 0 < t < 2[ms]5 2 < t < 4[ms]
− 52ms
t+ 10 4 < t < 6[ms]−5 6 < t < 8[ms]
en Maxima, se define cada tramo como
(%i1) i1(t):= 5/(0.002)*t;
i2(t):= 5;
i3(t):= -5/(0.002)*t + 10;
i4(t):= -5;
la salida de Maxima sera
(%o1) i1 (t) :=5
0,002t
1.9. FUENTES IDEALES DE TENSION O CORRIENTE 25
(%o2) i2 (t) := 5
(%o3) i3 (t) :=−5
0,002t+ 10
(%o4) i4 (t) := −5
y luego se arma la funcion final de la siguiente forma
(%i5) i(t):= if(t<0.002) then (i1(t)) else (
if(t<0.004) then (i2(t)) else (
if(t<0.006) then (i3(t)) else (i4(t)) ) );
la grafica se muestra en la figura 1.16a, y se obtiene mediante
(%i6) wxplot2d( i(t), [t,0,0.008]);
Para obtener la caıda de tension en la resistencia vR(t) = Ri(t), secalcula el valor de cada tramo (con R = 5Ω)
(%i9) vR1:5*i1(t);
vR2:5*i2(t);
vR3:5*i3(t);
vR4:5*i4(t);
(%o9) 12500,0 t
(%o10) 25
(%o11) 5 (10− 2500,0 t)
(%o12) −25
y se arma la funcion por tramos
(%i13) vR(t):= if(t<0.002) then (vR1) else (
if(t<0.004) then (vR2) else (
if(t<0.006) then (vR3) else (vR4) ) );
cuya grafica se muestra en la figura 1.16b, y se obtiene mediante
(%i14) wxplot2d(vR(t),[t,0,0.008]);
La caida de tension en el inductor vL(t) = Ldi(t)dt
se obtiene de igualforma calculando cada tramo (con L = 0,004H)
(%i16) vL1:0.004*diff(i1(t),t,1);
vL2:0.004*diff(i2(t),t,1);
vL3:0.004*diff(i3(t),t,1);
vL4:0.004*diff(i4(t),t,1);

26 CAPITULO 1. FUNDAMENTOS
(%o16) 10,0
(%o17) 0
(%o18) −10,0
(%o19) 0
y se arma la funcion por tramos
(%i20) vL(t):= if(t<0.002) then (vL1) else (
if(t<0.004) then (vL2) else (
if(t<0.006) then (vL3) else (vL4) ) );
(%i21) wxplot2d(vL(t),[t,0,0.008],[y,-12,12]);
cuya grafica se muestra en la figura 1.16c
Ejercicio 5 Planteo y resolucion utilizando Maxima
Primero definimos en Maxima la tension v(t) de la fig. 1.12 como
(%i19) v1:20.0;
v2:-20.0;
v(t):= if(t<0.005) then (v1) else (v2);
Luego a partir de esta calculamos la corriente que circula por la ramade la resistencia iR(t) en cada tramo
(%i26) iR1(t):=v1/R;
iR2(t):=v2/R;
iR1:iR1(t), R=4;
iR2:iR2(t), R=4;
iR(t):= if(t<0.005) then (iR1) else (iR2);
y la corriente por la rama del inductor iL(t)
(%i36) iL1(t):=(1/L)*integrate(v1,t,0,t);
iL2(t):=(1/L)*integrate(v2,t,0.005,t) + iL1(0.005);
(%o36) iL1 (t) :=1
L
∫ t
0
v1dt
(%o37) iL2 (t) :=1
L
∫ t
0,005
v2dt+ iL1 (0,005)
la corriente del primer tramo es
(%i38) iL1:iL1(t),L=0.01;

1.9. FUENTES IDEALES DE TENSION O CORRIENTE 27
-6
-4
-2
0
2
4
6
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008
t
(a) i(t)
-30
-20
-10
0
10
20
30
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008
t
(b) vR(t)
-10
-5
0
5
10
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008
t
(c) vL(t)
Figura 1.16: Grafica de la corriente, caıda de tension la resistencia y el inductor

28 CAPITULO 1. FUNDAMENTOS
(%o38) 2000,0 t
y la del segundo tramo teniendo en cuenta la condicion inicial deltramo anterior
(%i40) iL2:iL2(t),L=0.01;
(%o40) 10,0− 2000,0 (t− 0,005)
Luego se arma la expresion por tramos de la corriente del inductor
(%i41) iL(t):= if(t<0.005) then (iL1) else (iL2);
Por ultimo la corriente total iT (t) = iR(t) + iL(t) se obtiene mediante
(%i42) iT1:iR1+iL1;
iT2:iR2+iL2;
iT(t):=if(t<0.005) then (iT1) else (iT2);
cuya grafica se muestra en la figura 1.17
-6
-4
-2
0
2
4
6
8
10
12
14
16
0 0.002 0.004 0.006 0.008 0.01
if t <
0.0
05 th
en 2
000.
0*t+
5.0
else
5.0
-200
0.0*
(t-0
.005
)
t
Figura 1.17: Grafica de la corriente total iT (t)
Ejercicio 6 Planteo y resolucion utilizando Maxima
La corriente i(t) que atraviesa la rama RLC se representa por tramos
(%i48) i1(t):=(10/0.001)*t;
i2(t):=10;
i3(t):=(-10/0.001)*t + 30;
i4(t):=-10;
i5(t):=(10/0.001)*t - 60;
i(t):= if(t<0.001) then i1(t) else (
if(t<0.002) then i2(t) else (
if(t<0.004) then i3(t) else (
if(t<0.005) then i4(t) else i5(t)) ) );

1.9. FUENTES IDEALES DE TENSION O CORRIENTE 29
La caida de tension en el capacitor vC(t) se calcula para cada tramo(evaluando la condicion inicial del tramo anterior)
(%i64) vc1(t):=(1/C)*integrate(i1(t),t,0,t);
vc1: vc1(t), C=0.0005;
(%i66) vc2(t):=(1/C)*integrate(i2(t),t,0.001,t) + vci1;
vc2:vc2(t), C=0.0005, vci1=10000000.0*(0.001)^2;
(%i69) vc3(t):=(1/C)*integrate(i3(t),t,0.002,t) + vci2;
vc3:vc3(t), C=0.0005, vci2=20000*0.002 - 10;
(%i72) vc4(t):=(1/C)*integrate(i4(t),t,0.004,t) + vci3;
vc4:vc4(t), C=0.0005, vci3=-10000000.0*(0.004)^2 +60000.0*(0.004)- 50.0;
(%i74) vc5(t):=(1/C)*integrate(i5(t),t,0.005,t) + vci4;
vc5:vc5(t), C=0.0005, vci4= 110 - 20000*0.005;
y se arma la funcion por tramos
(%i76) vc(t):= if(t<0.001) then vc1 else (
if(t<0.002) then vc2 else (
if(t<0.004) then vc3 else (
if(t<0.005) then vc4 else vc5) ) );
cuya grafica se muestra en la figura 1.18
-5
0
5
10
15
20
25
30
35
40
0 0.001 0.002 0.003 0.004 0.005 0.006
t
Figura 1.18: Grafica de la caıda de tension en el capacitor, vC(t)

30 CAPITULO 1. FUNDAMENTOS
Capıtulo 2
Senales
Las senales mas utilizadas en electronica se pueden clasificar teniendoen cuenta su variacion en el tiempo en constantes o variables. A su vez,segun la regularidad de su variacion temporal, se subdividen en periodicas,pseudoperiodicas y aperiodicas
Las senales variables se las representa utilizando letras minusculas comof(t), i(t) o v(t), mientras que para senales invariantes en el tiempo se utilizanletras mayusculas como A o I.
En este capıtulo veremos algunas de las senales mas utilizadas en electroni-ca, su calsificacion y los parametros que se utilizan para caracterizarlas.Luego presentaremos un conjunto de senales llamadas fundamentales quenos serviran para construir con ellas algunas formas de ondas definidas portramos.
2.1. Senales de excitacion variables en el tiempo
Una senal que varıa en el tiempo se la representa utilizando letras minuscu-las, y segun la repetitividad de su variacion podemos clasificarlas en:
2.1.1. Senales periodicas
Una senal periodica es una senal tal que luego de ocurrir una serie devalores determinados y en una secuencia dada, estos vuelven a repetirse deigual forma, cıclica e indefinidamente en el tiempo. La fig. 2.1 muestra dosejemplos de senales periodicas.
2.1.2. Senales pseudoperiodicas
En las senales pseudoperiodicas ciertos arreglos de puntos se repitencıclicamente en el tiempo, pero con diferente amplitud. Estas senales son lasnormalmente obtenidas a partir de una atenuacion temporal de una senalperiodica. En la figura 2.2 se muestra un ejemplo de este tipo.
31

32 CAPITULO 2. SENALES
f(t)g(t)
tt 00
Figura 2.1: Senales periodicas
1
2
3
-1
-2
-3
1 2 3 4 t[s]
vC(t)[V ]
Figura 2.2: Senal pseudoperiodica
2.1.3. Senales aperiodicas
Son todas las restantes senales que varıan con el tiempo sin repetitividad,como la respuesta mostrada en la fig. 2.3
0.125
1 2 3 4 t[s]
i1(t)[A]
Figura 2.3: Senal aperiodica

2.2. PARAMETROS CARACTERISTICOS DE UNA SENAL VARIABLE33
2.2. Parametros caracterısticos de una senal varia-ble
La siguiente nomina de parametros son en general caracterısticas de lassenales periodicas y pseudoperiodicas.
Perıodo tiempo mınimo que debe transcurrir para que ocurra una seriecompleta de valores. Se mide en segundos y se lo denota con la letraT .
Ciclo serie de valores contenidos en un tiempo igual a un perıodo T .
Frecuencia cantidad de ciclos por unidad de tiempo, o inversa del perıodoT .
f =1
T
Frecuencia angular heredada de las funciones trigonometricas, la frecuen-cia angular, o pulsacion angular es la constante que relaciona radianescon tiempo en un ciclo. Se define como la cantidad de radianes por uni-dad de tiempo. Se la simboliza con la letra ω y su unidad de medidaes el radian sobre segundo [ rad
s].
ωT = 2π ⇒ ω =2π
T= 2π f (2.1)
Fase abcisa de un punto arbitrario de la senal que, segun el eje este calibradoen tiempo o en radianes, representa un valor temporal o un angulo.Si se trata de un valor angular se la denota generalmente con letrasgriegas como θ, ϕ o φ.
2.3. Valores asociados a la amplitud
2.3.1. Valor instantaneo
Se denomina valor instantaneo de una senal temporal, a la amplitudcorrespondiente a determinado valor de fase, por ejemplo f(t0) o i(0).
2.3.2. Valor maximo
Este valor se refiere al maximo absoluto de la senal, cuando se tratade senales pseudoperiodicas o aperiodicas, en el caso de senales periodicasel valor maximo se refiere al maximo valor de amplitud del perıodo. Se lorepresenta con letras mayusculas y subındice m o max (Im o Imax).
Si en una senal periodica el maximo positivo es diferente del maximonegativo en valor absoluto, para diferenciarlos se los representa como Im+ eIm− respectivamente.

34 CAPITULO 2. SENALES
2.3.3. Valor pico a pico
Este valor representa la excursion maxima de la senal, en el caso de unasenal con maximo positivo igual al maximo negativo, el valor pico a pico es
Ipp = 2 Imax (2.2)
sino
Ipp = Imax+ − Imax− (2.3)
2.3.4. Valor medio
El valor medio de una senal se calcula mediante el Teorema de la media,cuyo enunciado dice:
Teorema Si la funcion i(t) es continua en el intervalo [a, b], existe en esteintervalo un punto η tal que se verifica la siguiente igualdad
∫ b
a
i(t) dt = (b− a) i(η) (2.4)
Si el intervalo [a, b] es igual a un perıodo T , entonces el valor i(η) es elvalor medio de la senal i(t). Como este es un valor constante se lo representacon una letra mayuscula. Despejando de 2.4 el valor medio Imed es
Imed =1
T
∫ T
0i(t) dt (2.5)
Como la integracion de una corriente i(t) a lo largo de un tiempo representala cantidad de cargas transportadas en ese tiempo, el valor medio representael transporte de cargas neta de una senal de corriente.
Observese que la integral (2.5) puede ser nula, es el caso de senales cuyaarea encerrada positiva es igual al area encerrada negativa, por ejemplo lassenales sinusoidales puras. En este caso, se dice que las senales son de valormedio nulo.
Componente de continua
Si a una senal g(t) de valor medio nulo se le suma una senal constantede valor K, el valor medio de la nueva senal f(t) = g(t) +K sera
1
T
∫ T
0g(t) +K dt = K (2.6)
ya que por hipotesis el valor medio de g(t) es cero. Cualquier senal de valormedio no nulo puede ser descompuesta en una de valor medio nulo1 mas unaconstante igual a su valor medio. En general se dice que una senal de valormedio NO nulo tiene una componente de continua igual a su valor medio.En la fig. 2.4 se puede ver lo dicho en forma grafica.
1Simplemente restando a esta su valor medio.

2.3. VALORES ASOCIADOS A LA AMPLITUD 35
+ =
Kg(t) f(t)
t tt 000
Figura 2.4: Senal con componente de continua
2.3.5. Valor medio de modulo o Valor medio absoluto
Para senales cuyo valor medio es nulo, se calcula el llamado valor medio
de modulo tomando la integral a lo largo de un perıodo del modulo |i(t)| dela senal. Se lo representa con mayuscula y el subındice med entre signos demodulo I|med|
I|med| =1
T
∫ T
0|i(t)| dt (2.7)
este valor se calcula solo si el valor medio de la senal es nulo, y se lo utilizaen su reemplazo para las operaciones que impliquen la utilizacion del valormedio.
2.3.6. Valor eficaz
El valor eficaz de una senal variable es igual a la amplitud de una senalcontinua que disipa la misma potencia media2 que dicha senal variable. Porejemplo si se trata de senales de corriente el valor eficaz asociado a la senalvariable i(t) sera igual al valor de la senal continua I que disipe la mismapotencia media.
Consideremos la resistencia de valor R de la fig. 2.5. Segun la definicion,y tomando como ejemplo una senal de corriente, se debe encontrar el valorde corriente continua que produce la misma disipacion de potencia que lasenal variable, ambas actuando sobre la misma resistencia R.
i(t)
vR(t)
I
VR
RRPa = Pc
Figura 2.5: Sistema contınuo y alterno disipando la misma potencia media
La senal variable produce una potencia instantanea dada por
pa(t) = i(t)vR(t) = i2(t)R
cuyo valor medio depende del perıodo T ,
Pa =1
T
∫ T
0pa(t) dt =
1
T
∫ T
0i2(t)R dt (2.8)
2Aquı potencia media se refiere al valor medio de la potencia instantanea.

36 CAPITULO 2. SENALES
Tfase
diferencia de fase
ciclo
GefGmed
Gmg(t)
t
t
0
0
Figura 2.6: Parametros de senales periodicas
Por otro lado la corriente continua sobre la misma R disipa una potenciainstantanea
pc(t) = I2R
cuyo valor medio coincide con el valor instantaneo por ser una senal cons-tante
Pc = I2R
si ahora igualamos las potencias medias Pa = Pc obtenidas a partir de lasdos senales
1
T
∫ T
0i2(t)R dt = I2R (2.9)
vemos que el valor de corriente continua que produce la misma disipacionde potencia que la senal alterna es
Ief =
√1
T
∫ T
0i2(t) dt (2.10)
La ecuacion (2.10) representa el valor eficaz de una senal y es la raızcuadratica media de la senal i(t), conocida tambien por sus siglas en inglescomo RMS (root mean square).
En la figura 2.6 se pueden ver algunos parametros y valores de los vistosanteriormente, representados sobre una senal periodica arbitraria.
2.3.7. Factores caracterısticos de senales periodicas
Los siguientes factores se definen a partir de los valores caracterısticosvistos anteriormente. Tienen como objeto representar numericamente la for-ma de la senal.

2.4. SENALES PERIODICAS 37
Factor de cresta
Al cociente entre el valor maximo y el valor eficaz de la senal se lo conocecomo factor de cresta
fc =ImIef
Factor de forma
Es el mas utilizado, se define como el cociente entre el valor eficaz y elvalor medio de la senal. Si la senal es de valor medio nulo, su utiliza el valormedio de modulo
ff =IefImed
2.4. Senales periodicas
Si bien existen una varidad de senales periodicas de uso comun en electroni-ca, es importante destacar que cualquier senal periodica puede ser represen-tada mediante una serie de Fourier, compuesta por senales sinusoidales dediferentes amplitudes y frecuencias, por lo que el analisis de respuestas de loscircuitos se concentrara mayormente a las respuestas a senales sinusoidales.Este tema se vera en detalle en el capıtulo “Senales poliarmonicas”.
A continuacion se definen algunas senales periodicas utilizadas comun-mente en electricidad.
2.4.1. Rectangular
Una senal rectangular es una senal periodica de valor medio nulo definidacomo (figura 2.11a)
f(t) =
A para 0 < t < T
2
−A para T2 < t < T
(2.11)
2.4.2. Cuadrada
Una senal cuadrada es una senal periodica de valor medio no nulo defi-nida como
f(t) =
A para 0 < t < T
2
0 para T2 < t < T
(2.12)

38 CAPITULO 2. SENALES
2.4.3. Diente de sierra
Una senal diente de sierra es una senal periodica de valor medio no nulodefinida como (figura 2.11b)
f(t) = At para 0 < t < T (2.13)
2.4.4. Triangular
Una senal triangular es una senal periodica de valor medio nulo definidacomo (figura 2.11c)
f(t) =
4ATt−A para 0 < t < T
2
−4ATt+ 3A para T
2 < t < T(2.14)
2.4.5. PWM (Pulse Wide Modulation)
Una senal PWM es una senal pseudoperiodica de valor medio no nulodefinida como (figura 2.11e)
f(t) =
A para 0 < t < Ta
0 para Ta < t < T(2.15)
para 0 < Ta < T . La relacion entre el tiempo Ta y el periodo T se conocecomo ciclo de trabajo, o Duty cycle en ingles (D = Ta
T). El ciclo de trabajo
D puede variar entre 0 y 1.
2.5. Senales aperiodicas fundamentales
Las senales aperiodicas impulso, escalon y rampa se las conoce con elnombre de fundamentales, puesto con con ellas se pueden construir unagran variedad de senales aperiodicas diferentes. Definiremos a continuacioncada una de las fundamentales, determinaremos como se relacionan y luegoveremos como se utilizan para construir otras.
2.5.1. Impulso o delta de Dirac
La funcion impulso o delta de Dirac se define como
δ(arg) =
0 si el arg 6= 0∞ si el arg = 0
si el argumento de la funcion es t entonces
δ(t) =
0 si t 6= 0∞ si t = 0

2.5. SENALES APERIODICAS FUNDAMENTALES 39
que es un impulso en t = 0. Si el argumento es t− t0 entonces tendremos unimpulso en t = t0
δ(t− t0) =
0 si t 6= t0∞ si t = t0
Un delta de Dirac cumple ademas con que su area total es unitaria∫ ∞
−∞δ(t) dt = 1 (2.16)
t
δ(t)
f(t)
(a) impulso en t = 0
t0 t
δ(t− t0)
f(t)
(b) impulso en t = t0
Figura 2.7: Funcion impulso o delta de Dirac
2.5.2. Escalon unitario
Si definimos la funcion integral del impulso de forma
u(t) =
∫ t
−∞δ(t) dt (2.17)
esta funcion sera 0 para t < 0 y 1 para t > 0. Se la conoce como funcionescalon unitario y se define como
u(arg) =
0 si el arg < 01 si el arg > 0
si el argumento es el tiempo t, u(t) sera
u(t) =
0 ∀t < 01 ∀t > 0
cuya grafica es la figura 2.8a.Si el argumento es t− t0, u(t− t0) sera
u(t− t0) =
0 ∀t < t01 ∀t > t0
lo que significa que el escalon se ve desplazado un tiempo t = t0, como segrafica en la figura 2.8b.

40 CAPITULO 2. SENALES
t
1
u(t)
f(t)
(a) escalon unitario en t = 0
t0 t
1
u(t− t0)
f(t)
(b) escalon unitario en t = t0
Figura 2.8: Funcion escalon unitario
2.5.3. Rampa unitaria
Tomando la integral de la funcion escalon entre −∞ y t definimos unanueva funcion aperiodica fundamental que se llama rampa
ρ(t) =
∫ t
−∞u(t) dt (2.18)
La funcion rampa se define como
ρ(t) =
0 si t < 0t si t > 0
si comienza en t = 0, o
ρ(t− t0) =
0 si t < t0t− t0 si t > t0
si comienza en t = t0. En la fig. 2.9 se pueden ver sus graficas.
t
ρ(t)
f(t)
(a) rampa unitaria en t = 0
t0 t
ρ(t− t0)
f(t)
(b) rampa unitaria en t = t0
Figura 2.9: Funcion rampa unitaria

2.6. CONSTRUCCION DE SENALES APERIODICAS USANDO LAS FUNDAMENTALES41
En base a lo anterior, la relacion entre las diferentes fundamentales enterminos de sus derivadas sera
u(t) =dρ(t)
dt(2.19)
δ(t) =du(t)
dt(2.20)
2.6. Construccion de senales aperiodicas usandolas fundamentales
Combinando linealmente las senales pseudoperiodicas fundamentales po-demos construir nuevas senales, a continuacion vemos algunos ejemplos
2.6.1. Pulso rectangular
Sumando escalones desplazados de amplitudes opuestas podemos obte-ner pulsos de cualquier duracion, amplitud y tiempo de inicio. Por ejemploel pulso unico de la figura 2.10 lo podemos obtener como la suma de dosescalones desplazados Au(t− t0) y −Au(t− t1) de forma que
f(t) = Au(t− t0)−Au(t− t1) ; t0 < t1 (2.21)
tt0 t1
Au(t− t0)
−Au(t− t1)
A
−A
f(t)
⇒tt0 t1
Af(t)
Figura 2.10: Pulso formado por dos escalones desplazados
2.6.2. Pulso triangular
Sumando rampas desplazadas podemos obtener un pulso triangular, porejemplo
f(t) = Aρ(t)−Aρ(t− t0)−Aρ(t− t0) +Aρ(t− 2t0)
f(t) = Aρ(t)− 2Aρ(t− t0) +Aρ(t− 2t0) (2.22)
es un pulso triangular de 2t0 de duracion y At0 de valor maximo.
42 CAPITULO 2. SENALES
Ejercitacion
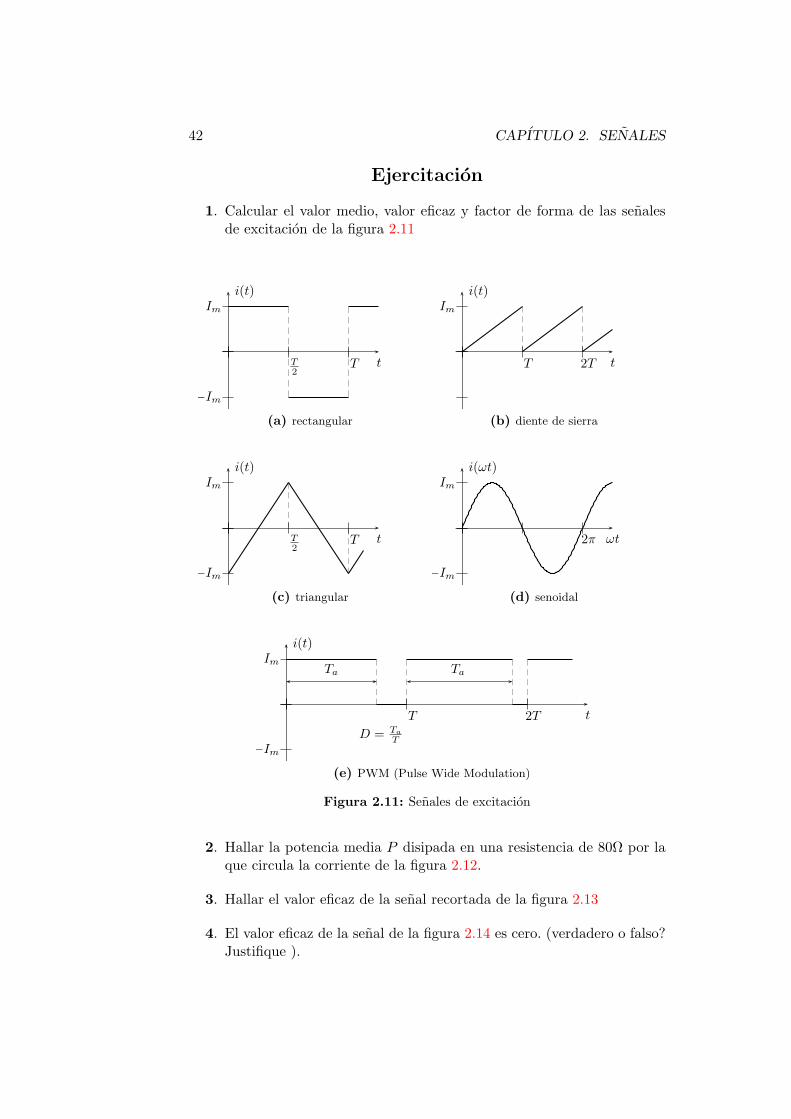
1. Calcular el valor medio, valor eficaz y factor de forma de las senalesde excitacion de la figura 2.11
Im
−Im
T2
T t
i(t)
(a) rectangular
Im
T 2T t
i(t)
(b) diente de sierra
Im
−Im
T2
T t
i(t)
(c) triangular
Im
−Im
2π ωt
i(ωt)
(d) senoidal
Ta
T
Ta
2T
D = Ta
T
Im
−Im
t
i(t)
(e) PWM (Pulse Wide Modulation)
Figura 2.11: Senales de excitacion
2. Hallar la potencia media P disipada en una resistencia de 80Ω por laque circula la corriente de la figura 2.12.
3. Hallar el valor eficaz de la senal recortada de la figura 2.13
4. El valor eficaz de la senal de la figura 2.14 es cero. (verdadero o falso?Justifique ).

2.6. CONSTRUCCION DE SENALES APERIODICAS USANDO LAS FUNDAMENTALES43
5
-5
0.1 0.2 t[s]
i(t)[A]
Figura 2.12: Corriente i(t)
π 2π
Im
Im2
ωt
sin(ωt)
Figura 2.13: Senal senoidal rectificada completa y recortada a 0,5 de su valormaximo
5. Encontrar el valor eficaz en funcion de t0 de la senal de la fig. 2.15, develocidad angular ω = 1. Verificar que para t0 = T el valor eficaz es elde una senal senoidal.
6. La forma de onda de corriente mostrada en la figura 2.16 circula porun inductor ideal alimentado por una fuente de tension. Obtener lasenal de excitacion de la fuente de tension expresada mediante senalesaperiodicas fundamentales y calcular el valor medio y eficaz de estatension.
7. Calcular el valor eficaz de la corriente en un capacitor si se aplica a susbornes una tension como la indicada en la fig. 2.17. Operar utilizando
f(t)
tT
Figura 2.14: Senal de valor eficaznulo
f(t) = et sen(10t) 0 < t < T
con T =8
5π
44 CAPITULO 2. SENALES
f(t)20
tt0
Figura 2.15: Senal de valor eficaz variable
1
2
3
1 6 7 12 13
i(t)
t
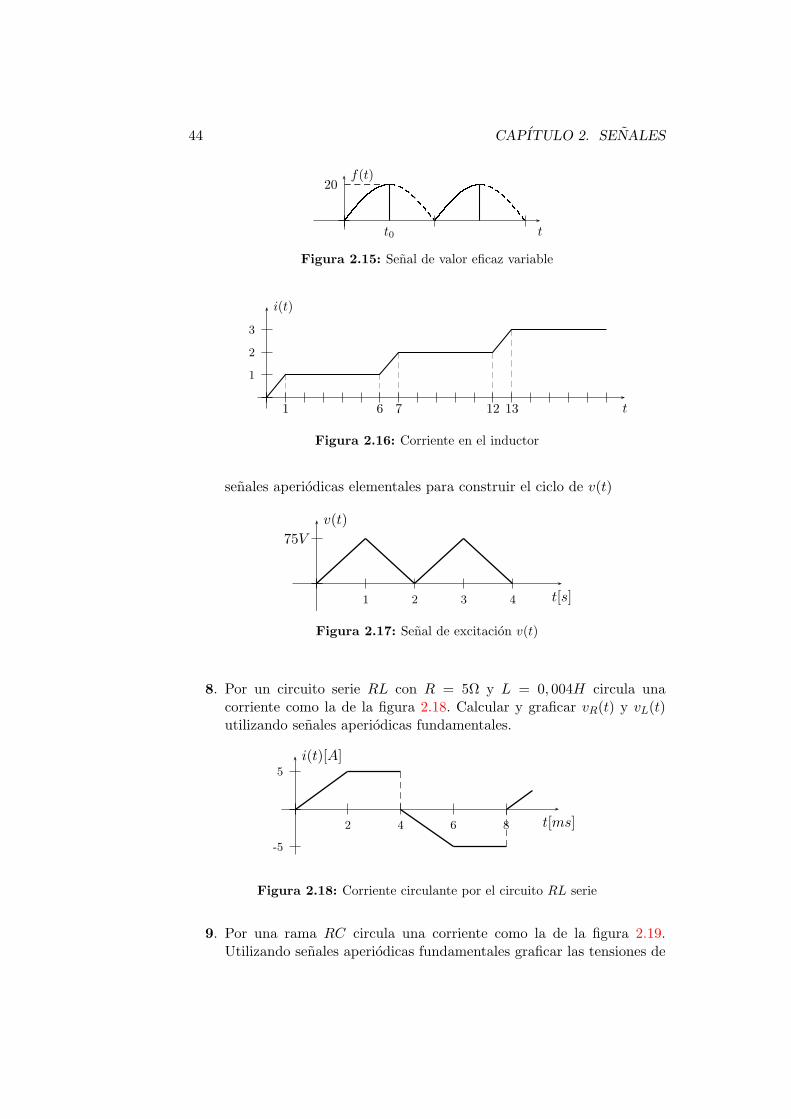
Figura 2.16: Corriente en el inductor
senales aperiodicas elementales para construir el ciclo de v(t)
1 2 3 4 t[s]
75V
v(t)
Figura 2.17: Senal de excitacion v(t)
8. Por un circuito serie RL con R = 5Ω y L = 0, 004H circula unacorriente como la de la figura 2.18. Calcular y graficar vR(t) y vL(t)utilizando senales aperiodicas fundamentales.
5
-5
2 4 6 8 t[ms]
i(t)[A]
Figura 2.18: Corriente circulante por el circuito RL serie
9. Por una rama RC circula una corriente como la de la figura 2.19.Utilizando senales aperiodicas fundamentales graficar las tensiones de

2.6. CONSTRUCCION DE SENALES APERIODICAS USANDO LAS FUNDAMENTALES45
cada elemento considerando que el capacitor se encuentra inicialmentedescargado.
1 2 3 4 t
i(t)
Figura 2.19: Corriente variable circulante por una rama RC
46 CAPITULO 2. SENALES
Soluciones
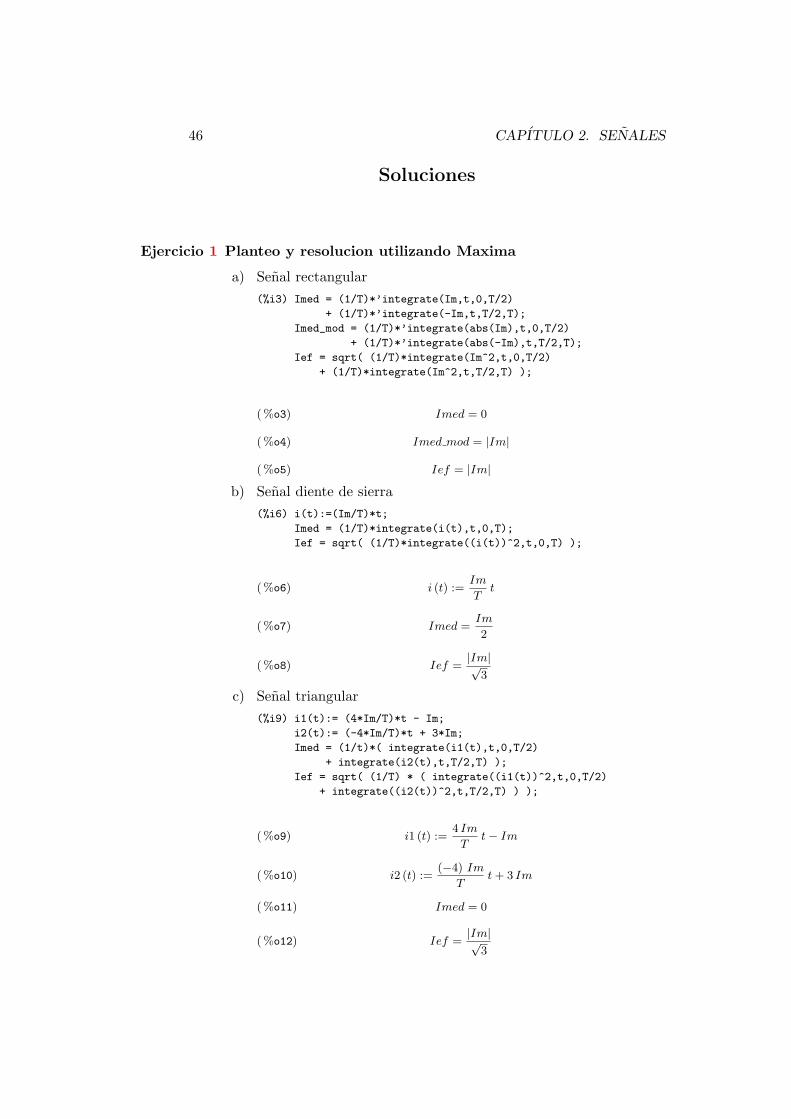
Ejercicio 1 Planteo y resolucion utilizando Maxima
a) Senal rectangular
(%i3) Imed = (1/T)*’integrate(Im,t,0,T/2)
+ (1/T)*’integrate(-Im,t,T/2,T);
Imed_mod = (1/T)*’integrate(abs(Im),t,0,T/2)
+ (1/T)*’integrate(abs(-Im),t,T/2,T);
Ief = sqrt( (1/T)*integrate(Im^2,t,0,T/2)
+ (1/T)*integrate(Im^2,t,T/2,T) );
(%o3) Imed = 0
(%o4) Imed mod = |Im|
(%o5) Ief = |Im|
b) Senal diente de sierra
(%i6) i(t):=(Im/T)*t;
Imed = (1/T)*integrate(i(t),t,0,T);
Ief = sqrt( (1/T)*integrate((i(t))^2,t,0,T) );
(%o6) i (t) :=Im
Tt
(%o7) Imed =Im
2
(%o8) Ief =|Im|√
3
c) Senal triangular
(%i9) i1(t):= (4*Im/T)*t - Im;
i2(t):= (-4*Im/T)*t + 3*Im;
Imed = (1/t)*( integrate(i1(t),t,0,T/2)
+ integrate(i2(t),t,T/2,T) );
Ief = sqrt( (1/T) * ( integrate((i1(t))^2,t,0,T/2)
+ integrate((i2(t))^2,t,T/2,T) ) );
(%o9) i1 (t) :=4 Im
Tt− Im
(%o10) i2 (t) :=(−4) Im
Tt+ 3 Im
(%o11) Imed = 0
(%o12) Ief =|Im|√
3

2.6. CONSTRUCCION DE SENALES APERIODICAS USANDO LAS FUNDAMENTALES47
d) Senal senoidal
(%i30) assume(T>0);
Imed = (1/2*%pi) * integrate(Im*sin(t),t,0,2*%pi);
Ief = sqrt( (1/(2*%pi)) * integrate( (Im*sin(t))^2,t,0,2*%pi) );
(%o31) Imed = 0
(%o32) Ief =|Im|√
2
e) Senal PWM
(%i13) Imed = (1/T) * integrate(Im,t,0,Ta);
Ief = sqrt( (1/T) * integrate(Im^2,t,0,Ta) );
(%o13) Imed =ImTa
T
(%o14) Ief = |Im|√
Ta
T
Ejercicio 3 Planteo
Para obtener el valor eficaz de la senal sinusoidal rectificada de la figura2.13 primero se deben averiguar los valores de abcisa para los cualesla senal es recortada, teniendo en cuenta que el recorte se producecuando el seno llega a la mitad de su valor maximo.
Llamando a1 y a2 a estos valores de abcisa tenemos
0,5Im = Im sin(a1)
a1 = sin−1
(1
2
)(2.23)
por lo tanto
a2 = π − sin−1
(1
2
)(2.24)
entonces la senal sera
f(ωt) =
Im sin(ωt) 0 < ωt < a1Im2 a1 < ωt < a2Im sin(ωt) a2 < ωt < π
(2.25)

48 CAPITULO 2. SENALES
El valor eficaz de esta senal definida por tramos es
Fef =
√1
π
∫ π
0(f(ωt))2 dωt
=
√√√√ 1
π
[∫ a1
0I2m sin2(ωt) dωt+
∫ a2
a1
(Im2
)2
dωt+
∫ π
a2
I2m sin2(ωt) dωt
]
=
√√√√ 1
π
[2
∫ a1
0I2m sin2(ωt) dωt+
∫ a2
a1
(Im2
)2
dωt
]
=
√√√√ 1
π
[∫ a1
0I2m(1− cos(2ωt)) dωt+
∫ a2
a1
(Im2
)2
dωt
](2.26)
Resolucion numerica
Resolviendo (2.23) y (2.24) tenemos
a1 =π
6
a2 =5
6π
que llevados a (2.26) nos da
Fef =
√√√√I2mπ
(π
6− sin
(π3
)
2+
5π
24− π
24
)
Fef = 0,44216Im (2.27)
Capıtulo 3
Sistemas de primer ysegundo orden
3.1. Sistemas de primer orden
Un circuito electrico que contenga un elemento capaz de almacenarenergıa, como un inductor o un capacitor, tiene como ecuacion de equili-brio una ecuacion diferencial ordinaria (ODE) de primer orden
dx(t)
dt+ λx(t) = F (t) x(0) = x0
con λ una constante positiva que depende de los elementos del circuito yF (t) una funcion temporal que depende de la fuente de excitacion.
Este tipo de sistemas descripto por una ODE de primer orden se los co-noce como sistemas de primer orden y la respuesta esta dada por la solucioncompleta1 de esta ODE.
3.1.1. Circuito sin fuente
Si se excita un circuito de primer orden durante algun tiempo se alma-cenara en su elemento almacenador (L o C) una determinada cantidad deenergıa. Si luego se quita esta fuente de excitacion es posible observar larespuesta del sistema debido a la energıa acumulada en el elemento almace-nador. El estudio de la respuesta que aparece al dejar al circuito sin fuentees el mas sencillo de realizar ya que al no existir fuente de excitacion co-nectada al sistema este puede ser descripto por una ODE homogenea (conF (t) = 0). Desarrollemos este caso en primer lugar utilizando un circuitoRL como ejemplo.
1La solucion completa de una ODE debe contemplar la solucion particular de la ecua-cion no homogenea mas la solucion general de la ecuacion homogenea
49

50 CAPITULO 3. SISTEMAS DE PRIMER Y SEGUNDO ORDEN
3.1.2. Circuito RL sin fuente
Supongamos que el circuito RL de la figura 3.1a se encuentra conectadodesde hace largo tiempo a la fuente de corriente, es decir que el inductorse encuentra totalmente energizado comportandose como un corto circuitoante la fuente de corriente continua que lo alimenta.
I0 L Ri(t)
t = 0
(a) Circuito RL
L Ri(t)
vL(t)
vR(t)
(b) t > 0
Figura 3.1: Circuito RL conectado a una fuente de corriente constante
En un instante t = 0 se abre el interruptor dejando al circuito RL sinfuente de alimentacion. Toda la energıa acumulada en el inductor se disi-para en la resistencia siguiendo la respuesta de la ODE de primer orden quedescribe al circuito. Estamos interesados entonces en conocer la forma de lacorriente i(t) para t > 0.
Para encontrar esta respuesta aplicamos la LKV en la malla RL de lafigura 3.1b, que resulta luego de abrir el interruptor en t = 0, segun lasreferencias indicadas tenemos
vL(t) + vR(t) = 0 (3.1)
Ldi(t)
dt+Ri(t) = 0 (3.2)
di(t)
dt+
1
τi(t) = 0 (3.3)
la ec. (3.3) es una ODE homogenea de primer orden, con τ = LR
una cons-tante positiva, que podemos resolver separando variables
1
i(t)di(t) = −1
τdt (3.4)
e integrando ambos miembros
∫1
i(t)di(t) = −
∫1
τdt
ln i(t) = −1
τt+ k
i(t) = Ae−1τt (3.5)
con A = ek una constante a determinar.

3.1. SISTEMAS DE PRIMER ORDEN 51
La ec. (3.5) es la solucion general de la (3.3), pues cualquier valor de Asatisface la ODE. Si se asigna algun valor particular para A se dice que separticulariza la respuesta encontrada.
Del punto de vista electrico, encontrar la solucion general significa en-contrar la respuesta para cualquier valor de energıa inicial acumulada enel inductor, luego particularizarla significa encontrar el valor de A de larespuesta general que corresponda segun el valor energetico del caso.
En efecto, si analizamos el circuito para t = 0, por condicion de conti-nuidad de corriente en el inductor podemos asegurar que la corriente en lamalla no puede ser discontinua, por lo que
i(0+) = i(0−) (3.6)
siendo 0− un infinitesimo de tiempo anterior a 0 y 0+ un infinitesimo detiempo posterior a 0. Esto significa que la corriente de malla en el instanteposterior a la apertura del interruptor debe ser igual a la corriente circulantepor el inductor en el instante anterior a dicha apertura, como i(0−) = I0,entonces
i(0+) = I0
si llevamos esta condicion a la respuesta general (3.5) tenemos
i(0) = Ae0 = I0 ⇒ A = I0
con lo que finalmente se obtiene la respuesta particular de la corriente demalla de este circuito RL
i(t) = I0e− 1
τt ∀t > 0 (3.7)
En la figura 3.2 se pude ver el grafico de la ecuacion (3.7).
I0
t
i(t)
Figura 3.2: Corriente de descarga del circuito RL de la figura 3.1a

52 CAPITULO 3. SISTEMAS DE PRIMER Y SEGUNDO ORDEN
Tensiones en los elementos
A partir de la corriente podemos encontrar la tension de cada elemento,de acuerdo a las referencias ya elegidas (fig. 3.1b). De la ec. (3.2)
vR(t) = Ri(t) = RI0e− 1
τt ∀t > 0
Para encontrar la tension en el inductor podemos despejarla de (3.1)
vL(t) = −vR(t) = −RI0e− 1
τt ∀t > 0
o calcularla segun su relacion tension-corriente
vL(t) = Ldi(t)
dt= L
[−R
LI0e
− 1τt
]
vL(t) = −RI0e− 1
τt ∀t > 0
obteniendo la misma funcion que antes tal como se esperaba.
En la fig. 3.3 se pueden ver los graficos de ambas tensiones, cuya sumaes nula en todo instante de tiempo.
RI0
−RI0
t
v(t)
vR(t)
vL(t)
Figura 3.3: Tensiones en los elementos del circuito RL de la figura 3.1a
3.1.3. Circuito RC sin fuente
Veamos ahora que ocurre con la tension de un capacitor mientras sedesenergiza. Supongamos un circuito como el de la figura 3.4a, el cual estuvoconectado a la fuente de tension durante un largo tiempo tal que el capacitorllego a su carga maxima. El interruptor desconecta la fuente de tension yconecta la resistencia al capacitor en t = 0. A partir de este momento laenergıa acumulada en el capacitor comienza a disiparse en la resistencia. Se

3.1. SISTEMAS DE PRIMER ORDEN 53
V0 C RvC(t)
t = 0
(a) Circuito RC
C R
i(t)vC(t) vR(t)
(b) t > 0
Figura 3.4: Circuito CR conectado a una fuente de tension constante
desea conocer la evolucion de la tension del capacitor durante todo el tiempode descarga, es decir para todo t > 0. 2
Para resolver aplicamos la LKV a la malla de la figura 3.4b que resultade cambiar el interruptor
vC(t) + vR(t) = 0 (3.8)
vC(t) +Ri(t) = 0 (3.9)
la corriente i(t) puede ponerse en terminos de vC(t)
i(t) = CdvC(t)
dt
que llevada a (3.9) nos queda
vC(t) +RCdvC(t)
dt= 0
dvC(t)
dt+
1
τvC(t) = 0 (3.10)
con τ = RC.La ec. (3.10) es una ODE homogenea de primer orden, similar a la que se
obtuvo en el analisis del circuito RL de la figura 3.1a (vease ecuacion (3.3)).Por lo tanto, al tratarse de la misma ODE que la (3.3), tiene la misma
respuesta general, es decir
vC(t) = Ae−1τt (3.11)
solo que para este caso el valor de τ es τ = RC.Para ajustar el valor que toma la funcion (3.11) en t = 0 debemos ana-
lizar el circuito en el tiempo t = 0−, ya que la tension del capacitor en elinstante anterior al cambio del interruptor sera igual a la tension en el ins-tante t = 0+, por condicion de continuidad de tension. Este valor de tensiones V0, entonces
vC(0) = A = V0 (3.12)
2Las siguientes igualdades son validas ∀t > 0, aunque en algunos casos no se especifiquepara mayor claridad del texto.

54 CAPITULO 3. SISTEMAS DE PRIMER Y SEGUNDO ORDEN
con lo que la respuesta de tension del circuito de la figura 3.4a para todot > 0 es
vC(t) = V0e− 1
τt ∀t > 0 (3.13)
Observando la ecuacion de equilibrio de la malla (3.8) vemos que latension en R es igual en magnitud y de signo contrario a vC(t)
vC(t) = −vR(t) = V0e− 1
τt ∀t > 0 (3.14)
En la figura 3.5 se pude ver el grafico de la ecuacion (3.13).
V0
−V0
t
vC(t)
vR(t)
Figura 3.5: Tension del capacitor del circuito de la figura 3.4a
Corriente de malla
La corriente de malla puede obtenerse a partir de la tension vR(t) divi-diendo por R
i(t) = −V0
Re
1τt ∀t > 0 (3.15)
y su grafica es identica a la de vR(t) en una escala de corriente. El valornegativo de la corriente nos indica que su sentido de circulacion es contrarioal de la referencia.
3.2. Constante de tiempo τ
La constante de tiempo determina la velocidad de crecimiento (o decaıda3) de la respuesta de un sistema de primer orden. Si se observan lassoluciones obtenidas en el estudio anterior se ve que esta constante τ dependesolamente de los elemtentos pasivos del circuito, es decir que la velocidad
3Para los sistemas sin fuentes como los anteriores la respuesta sera siempre una caıda,ya que al desconectar la fuente de excitacion la energıa almacenada solo puede disminuir(o permanecer constante, en cuyo caso la respuesta apreciada sera nula).

3.2. CONSTANTE DE TIEMPO τ 55
de variacion de la respuesta en un sistema de primer orden esta dada por elvalor se sus elementos.
Esta constante debe medirse en segundos [s], tal que al dividir a la varia-ble t resulte en un numero adimensional como exponente de la exponencial.Por esto recibe el nombre de constante de tiempo.
Es muy comun calcular los valores que toma la respuesta para tiem-pos multiplos de τ , de esta forma el analisis se independiza de los valoresabsolutos de tiempo y puede hablarse los valores que toma la respuesta encantidades de τ . Ası, por ejemplo, se sabe que la respuesta (3.13) caera apro-ximadamente al 36,7% de su valor inicial al transcurrir 1τ de tiempo, puestoque
vC(τ) = V0e−1 = 0,36788V0
y para valores sucesivos de τ
vC(2τ) = 0,13534V0
vC(3τ) = 0,049787V0
vC(4τ) = 0,018316V0
vC(5τ) = 0,0067379V0
· · ·
Como se ve la velocidad de caıda respecto de τ es muy rapida y, si bienmatematicamente la funcion solo vale cero para t → ∞, para aplicacionesde ingenierıa suele considerarse que la funcion vale cero para tiempos ma-yores a 5τ , despreciandose una cantidad menor al 1% del valor inicial de larespuesta.
Se puede determinar la constante de tiempo de un circuito desconocido apartir del grafico de su respuesta. Por ejemplo, si en la figura 3.5 se prolongala recta tangente a la funcion en el inicio hasta cortar con el eje de tiempo,esta cortara en t = τ (fig. 3.6), para verificarlo tomemos la derivada de larespuesta valuada en t = 0
dvC(t)
dt|t=0 = −
V0
τ(3.16)
la (3.16) es la pendiente m de la recta y(t) = mt + b que pasa por V0 ent = 0, es decir
y(t) = −V0
τt+ V0 (3.17)
esta recta corta el eje del tiempo en
0 = −V0
τt+ V0 ⇒ t = τ (3.18)

56 CAPITULO 3. SISTEMAS DE PRIMER Y SEGUNDO ORDEN
τ
V0
t
vC(t)
Figura 3.6: Constante de tiempo en un sistema de primer orden
3.2.1. Potencia y energıa
Consideremos el circuito RC serie anterior (fig. 3.4a), la potencia ins-tantanea para t > 0 sera
pC(t) = vC(t)iC(t)
pC(t) =(V0e
1τt)(−V0
Re
1τt
)
pC(t) = −C V 20
τe
2τt (3.19)
como se trata de un circuito sin fuente es de esperar que la potencia ins-tantanea sea cero para t→∞. El signo negativo de la potencia esta repre-sentando una disminucion de la energıa almacenada en el capacitor. El valormaximo de potencia instantanea se obtiene en t = 0 y vale
Pmax = pC(t)|t=0 = −C V 2
0
τ(3.20)
este valor es inversamente proporcional al τ del circuito, es decir que en cir-cuitos con menores valores de τ se obtendra una mayor potencia instantaneamaxima. Esto se debe a que en un circuito con un τ pequeno el tiempo pa-ra desenergizar el capacitor es menor, por ende debe ser desenergizado conmayor potencia.
Un analisis similar nos lleva a encotrar la potencia instantanea en runRL serie
pL(t) = −LI20τ
e2τt (3.21)
cuyo valor maximo en t = 0 sera
Pmax = pL(t)|t=0 = −LI20τ
(3.22)
aplicando para el caso las misma conclusiones que antes. En la fig. 3.7 semuestran las graficas de descarga de un inductor L con diferentes constantesde tiempo (diferentes resistencias conformando el circuito), observese quepara ambos casos se supone la misma corriente inicial I0.

3.3. RESPUESTA A UNA FUENTE CONSTANTE 57
I0
−LI0τ1
t
iL1(t)
pL1(t)
(a) τ1 = 2s
I0
−LI0τ2
t
iL2(t)
pL2(t)
(b) τ2 = 1s
Figura 3.7: Potencia instantanea en un inductor para diferentes valores de τ
3.3. Respuesta a una fuente constante
Una fuente constante aplicada a un sistema de primer orden tiene co-mo ecuacion de equilibrio una ODE de primer orden no homogenea, cuyarespuesta consta de dos partes, la solucion homogenea mas la solucion inho-mogenea. Consideremos para el analisis un circuito RC serie.
3.3.1. Circuito RC con fuente constante
En el circuito de la figura 3.8 se encuentra conectada una fuente detension desde hace un largo tiempo, tal que todo el circuito esta en unestado de reposo cuando se accionan los interruptores en t = 0, es decir queel capacitor ya ha alcanzado su maxima carga. En ese instante se desconectala fuente de tension y se introduce una fuente de corriente. Se desea encontraren estas condiciones la respuesta vC(t) ∀ t > 0
iin(t) = I0 vin(t) = V0
t = 0t = 0
R C vC(t)
iR iC
Figura 3.8: RC paralelo excitado con fuente de corriente constante
El analisis se inicia aplicando alguna de las leyes de Kirchhoff, en estecaso por ser un circuito paralelo se aplica LKI en el nudo principal. Observeseque para t > 0 el circuito queda formado por tres ramas en paralelo, la ramade la fuente de corriente iin(t), la rama de la resistencia R y la rama delcapacitor C. Tomando como positivas a las corrientes entrantes al nudo

58 CAPITULO 3. SISTEMAS DE PRIMER Y SEGUNDO ORDEN
tendremos
iin(t)− iC(t)− iR(t) = 0
iin(t) = CdvC(t)
dt+
vR(t)
R
como vC(t) = vR(t) la ecuacion se pone, por conveniencia, en terminos dela respuesta vC(t)
iin(t) = CdvC(t)
dt+
vC(t)
R
reemplazando el valor de fuente iin(t) = I0 y dividiendo ambos miembrospor C
I0C
=dvC(t)
dt+
vC(t)
RC(3.23)
La ec. 3.23 es una Ec. Dif. lineal de 1o orden, no homogenea, de formageneral
dx(t)
dt+
x(t)
τ= k1 (3.24)
con τ = RC y k1 =I0C
en este caso.Del punto de vista del analisis matematico esta ODE tiene una solucion
general formada por la solucion particular de la ODE no homogenea, mas lasolucion general de la homogenea. Luego se vera como estas dos solucionesrepresentan las diferentes respuestas presentes en este circuito.
Una forma de resolver esta Ec. Dif. es separando variables para poderintegrar
dx(t)
dt+
x(t)
τ= k1
dx(t)
dt=
k1 τ − x(t)
τdx(t)
k1 τ − x(t)=
dt
τ∫1
x(t)− k1 τdx(t) = −
∫1
τdt
ln(x(t)− k1 τ) = − t
τ+ k2
y por definicion de logarıtmo
x(t)− k1 τ = e−1τt+k2 = e−
1τt ek2
x(t) = k1 τ + k3 e− 1
τt (3.25)
con k3 = ek2

3.3. RESPUESTA A UNA FUENTE CONSTANTE 59
Para encontrar los valores de estas constantes k1τ y k3 en funcion de losestados iniciales y finales de x(t) se evalua la funcion 3.25.
Primero para t→∞
x(∞) = k1 τ + 0 → k1 τ = x(∞)
Luego se analiza para t→ 0, lo que se conoce como condicion incial delsistema. Sabiendo ya que k1 τ = x(∞)
x(0) = x(∞) + k3 · 1 → k3 = x(0)− x(∞)
se obtiene el valor de la segunda constante.Reemplazando estas constantes en la (3.25) queda
x(t) = x(∞) + [x(0)− x(∞)] e−1τt (3.26)
que es la respuesta general de la ODE (3.24).Observando la (3.26) puede verse que esta compuesta por dos terminos,
el primero es un termino constante y el segundo un termino exponencialdecreciente
x(t) = x(∞)︸ ︷︷ ︸xfo
+ [x(0)− x(∞)] e−1τt
︸ ︷︷ ︸xna
el termino constante xfo recibe el nombre de respuesta forzada y es el valorque toma la respuesta x(t) cuando t → ∞. Esta parte de la respuesta esla solucion particular de la Ec. Dif. no homogenea y existe solo si existeuna fuente forzante, de ahı su nombre de forzada. El termino exponencialxna se lo conoce como respuesta natural del sistema y es la solucion generalde la Ec. Dif. homogenea. Depende exclusivamente de la naturaleza de loscomponentes del sistema, es decir de los elementos del circuito, y por estose la conoce como respuesta natural. Las fuentes de excitacion y las condi-ciones iniciales del sistema solo determinan su amplitud. Esta parte de larespuesta tiende a cero con el tiempo4 por esto se la llama tambien respuesta
transitoria o respuesta de regimen transitorio. En contraparte, la respuestaforzada existe mientras exista una excitacion, y recibe el nombre respuesta
permanente o respuesta de regimen permanente
La respuesta obtenida representa la evolucion completa del parametroen cuestion partiendo de un estado inicial (x(0)) hasta llegar a un estadoestable final (t → ∞), donde la transicion entre los dos estados se producede una forma que solo depende de la naturaleza del circuito, es decir de larespuesta natural.
Si no se tiene informacion de lo que ocurrio antes del inicio del analisisdel sistema (antes de t = 0), entonces el estado inicial se considera siempre
4Estrıctamente la funcion exponencial e−1
τt se hace cero solo para t = ∞, pero a los
fines practicos esta funcion puede ser despreciada para un valor de tiempo mayor a 5τ

60 CAPITULO 3. SISTEMAS DE PRIMER Y SEGUNDO ORDEN
un estado estable, es decir un estado de reposo donde todos los elementosalmacenadores de energıa ya estan cargados al maximo o descargados porcompleto segun corresponda.
Mas adelante veremos que estos estados inicial y final no necesariamen-te deben ser estados de reposo como en el caso de excitacion con fuenteconstante. Estos estados se denominan en general estados de regimen per-manente, y la transicion entre dos estados de regimen permanente se realizasiguiendo la respuesta natural del sistema.
Volviendo a la (3.23) del circuito RC, segun lo visto su respuesta generalsera
vC(t) = vC(∞) + [vC(0)− vC(∞)] e−1
RCt
los valores de las constantes se deben encontrar por analisis del circuito parat→ 0 y t→∞.
Para t→ 0, por condicion de continuidad de tension en el capacitor elcircuito tiene el estado que tenıa en t = 0− (antes de abrir el interruptor,fig. 3.9), entonces la tension inicial sera vC(0
+) = vC(0−) = V0
V0C vC(0−)
Figura 3.9: Estado inicial del circuito RC
Para t→∞ el capacitor habra llegado a su maxima carga comportandosecomo un circuito abierto, la corriente a traves de el sera nula (fig. 3.10). Porlo tanto la tension final del capacitor sera
vC(∞) = vR(∞) = I0R
Reemplazando estos valores en la ec. 3.27 se obtiene
vC(t) = I0R+ [V0 − I0R] e−t
RC (3.27)
que es la funcion respuesta de la tension del capacitor del circuito de la fig.3.8
I0 R vC(∞)
iR
Figura 3.10: Estado final del circuito RC
En la fig. 3.11 se pueden ver las graficas de dos estados finales diferentes,la lınea continua representa la respuesta para el caso que el estado establefinal sea una tension menor a la tension inicial, RI0 < V0, y la lınea a

3.4. SISTEMAS LINEALES 61
trazos es la respuesta para RI0 > V0. En la grafica pueden observarse losestados estables inicial y final y la respuesta natural como transicion entrelos mismos.
RI0
RI0
V0
t
vC(t)
Figura 3.11: Tension del capacitor del circuito de la figura 3.8
3.4. Sistemas lineales
Un sistema es lineal si y solo si se satisfacen las propiedades de superpo-sicion y homogeneidad para todas las excitaciones y respuestas
Superposicion. La propiedad de superposicion se satisface si al excitar elsistema con una excitacion i1 se obtiene v1 y con una excitacion i2 seobtiene v2, entonces al excitar con la suma de las excitaciones i1 + i2se obtiene la suma de las respuestas
si i1 ⇒ v1
e i2 ⇒ v2
entonces i1 + i2 ⇒ v1 + v2
Homogeneidad. La propiedad de homogeneidad se satisface si al multi-plicar una excitacion por un numero real k, se multiplica tambien larespuesta por ese mismo factor
si i3 ⇒ v3
entonces k i3 ⇒ k v3
Los circuitos tratados en Teorıa de los circuitos I contienen solo ele-mentos lineales, por lo que se trata de sistemas lineales y cumplen con laspropiedades de superposicion y homogeneidad. Estas propiedades normal-mente se presentan en forma de teorema

62 CAPITULO 3. SISTEMAS DE PRIMER Y SEGUNDO ORDEN
Teorema de Superposicion: en un circuito lineal, constituido por ele-mentos lineales y fuentes, se puede hallar la respuesta total hallandola respuesta a cada fuente haciendo cero todas las demas y sumandodespues las respuestas individuales.
Para hacer cero o pasivar una fuente de tension se debe reemplazardicha fuente en el circuito por un corto circuito.
Para hacer cero o pasivar una fuente de corriente se debe abrir elcircuito en los bornes de dicha fuente.
3.5. Resolucion por superposicion
Consideremos por ejemplo el circuito de la fig. 3.12a. Para encontrar larespuesta total del sistema aplicando el teorema de superposicion se debenpasivar sistematicamente cada fuente dejando solo una activada por vez.Pasivando por ejemplo todas menos la fuente de tension V nos queda elcircuito de la fig. 3.12b. Luego operando para t > 0 y procediendo como enla seccion anterior obtenemos la respuesta completa debido a esta fuente
i1(t) =V
R− V
Re−
tτ (3.28)
notar que para esta respuesta la condicion inicial es cero, ya que la fuenteque provoca la condicion inicial en el inductor esta pasivada.
I0 VL
R
i(t)
t = 0t = 0
(a) Circuito RL con dos fuentes
VL
R
i1(t)
t = 0
(b) Fuente de corrientepasivada
I0 L
R
i2(t)
t = 0t = 0
(c) Fuente de tension pasivada
Figura 3.12: Analisis de circuito RL aplicando teorema de superposicion
Luego pasivamos todas menos la fuente de corriente I0, quedando el cir-cuito como en la fig. 3.12c. Al conmutar el interruptor la fuente de corrientese desconecta quedando el circuito sin fuente, por lo que la respuesta sera
i2(t) = I0e− t
τ (3.29)

3.6. RESPUESTA NATURAL MAS FORZADA 63
como vimos antes.Finalmente se obtiene la respuesta total sumando i1(t) + i2(t)
iT (t) =V
R+
(I0 −
V
R
)e−
tτ (3.30)
3.6. Respuesta natural mas forzada
Aplicar el teorema de superposicion como antes es una forma muchasveces util para resolver circuitos con muchas fuentes. Pero podemos conseguiraun mayor beneficio de este teorema si observamos la forma que se construyela respuesta natural al hacer la sumatoria de todas las respuestas. Cadarespuesta contribuye con su valor en t = 0 a la constante de la respuestanatural, de forma que esta constante en t = 0 cancele los valores de todaslas fuentes y de como resultado el valor inicial del circuito, es decir
iT (0) = if1(0) + if2(0) + if3(0) + · · ·+ ifn(0) + (3.31)
+ [I0 − if1(0)− if2(0)− if3(0)− · · · − ifn(0)] e0 (3.32)
Por ende la respuesta natural puede obtenerse en forma independientecuando ya se hayan obtenido todas las respuestas forzadas debido a cadauna de las fuentes forzantes, ya que su forma depende exclusivamente de loselementos del circuito (el τ es unico) y la constante se obtiene valuando larespuesta en t = 0 y aplicando la condicion inicial del circuito.
Es decir que podemos aplicar el teorema de superposicion para obtenertodas las forzadas y luego la natural unica en un circuito de primer orden.Para aplicar superposicion a un sistema con n fuentes de esta ultima formael procedimiento es el siguiente: se comienza por pasivar todas las fuentesmenos una y obtener la respuesta forzada if1 debido a esta primera fuente.Luego se pasivan todas las fuentes menos la segunda con lo que se obtienela respuesta forzada if2 debido a la segunda fuente. Esto se repite hastaobtener las n respuestas forzadas debido a las n fuentes presentes en elsistema. Luego se calcula la respuesta natural inat(t). Teniendo en cuentaque esta depende solamente de los elementos del circuito y no de las fuentes,para obtenerla se deben pasivar TODAS las fuentes forzantes del circuito yluego operar considerando solo las condiciones iniciales. Con estos pasos seobtiene la respuesta general completa del sistema
itotal(t) = if1(t) + if2(t) + if3(t) + · · ·+ ifn(t) +Ae−tτ
para particularizarla se hace t = 0 y se aplica la condicion incial del circuito,quedando
itotal(t) = if1(t) + if2(t) + if3(t) + · · ·+ ifn(t) + (3.33)
+ [I0 − if1(0)− if2(0)− if3(0)− · · · − ifn(0)] e− t
τ

64 CAPITULO 3. SISTEMAS DE PRIMER Y SEGUNDO ORDEN
3.7. Respuesta a una fuente no constante
Un sistema de primer orden que es excitado por una fuente generica,tiene como ecuacion de equilibrio una ODE de primer orden no homogenea
dx(t)
dt+
x(t)
τ= y(t) (3.34)
cuya solucion completa esta formada por una solucion general de la ho-mogenea (xn = Ce−
tτ ) mas la solucion particular de la no homogenea, es
decir la respuesta natural mas la respuesta forzada.
Esta ODE puede ser resuelta por varios metodos, uno de ellos se conocecomo metodo de Lagrange. El metodo se basa en la solucion propuesta pararesolver la ODE de primer orden homogenea. Por analogıa propone comosolucion una funcion de igual forma, pero en lugar de ser C una constante,es tambien una funcion dependiente del tiempo
x(t) = c(t)e−tτ (3.35)
Para probar que esta es solucion, se busca su derivada respecto del tiempo
dx(t)
dt=
dc(t)
dte−
tτ + c(t)
(−e− t
τ
τ
)
y se reemplaza en la ec. (3.34)
[dc(t)
dte−
tτ + c(t)
(−e− t
τ
τ
)]+
c(t)e−tτ
τ= y(t)
dc(t)
dte−
tτ = y(t)
dc(t)
dt= y(t)e
tτ (3.36)
integrando ambos miembros se encuentra c(t)
c(t) =
∫y(t)e
tτ dt+ C (3.37)
siendo C la constante de integracion.
Es decir, para que (3.35) sea solucion de (3.34), c(t) tiene que ser como(3.37). Reemplazando
x(t) =
(∫y(t)e
tτ dt+ C
)e−
tτ
x(t) = Ce−tτ + e−
tτ
∫y(t)e
tτ dt (3.38)

3.8. ALIMENTACION CON FUENTE SINUSOIDAL. CORRIENTE ALTERNA65
i(t)10 + e−2t
t = 0 70Ω
10H
Figura 3.13: RL serie alimentado con una fuente de tension no constante
y (3.38) es la solucion completa (natural mas forzada) de la ODE (3.34)
Por ejemplo, para el circuito de la fig. 3.13 la ecuacion de equilibrio parat > 0 es
v(t) = R i(t) + Ldi(t)
dt
10 + e−2t = 70 i(t) + 10di(t)
dt10 + e−2t
10= 7 i(t) +
di(t)
dt
de donde i(t) sera
i(t) = Ce−7t + e−7t
∫ (10 + e−2t
10
)e7t dt
i(t) = Ce−7t +1
7+
e−2t
50
como en t = 0 la corriente es nula, la constante C vale
i(0) = C +1
7+
1
50= 0
C = − 57
350
finalmente i(t)
i(t) =1
7− 57
350e−7t +
e−2t
50
3.8. Alimentacion con fuente sinusoidal. Corrientealterna
El caso particular de un circuito alimentado con una fuente senoidal esmuy importante debido al intensivo uso de este tipo de alimentaciones en laingenierıa. Se vera en detalle su resolucion aplicando el metodo de Lagrangevisto anteriormente.

66 CAPITULO 3. SISTEMAS DE PRIMER Y SEGUNDO ORDEN
i(t)Vmaxsen(ω t+ θv)
t = 0 R
L
Figura 3.14: RL serie alimentado con una fuente de tension senoidal
Si se alimenta un circuito RL serie con una fuente alterna como en lafig. 3.14 la ecuacion de equilibrio para t > 0 segun la LKV sera
vin(t)− vR(t)− vL(t) = 0
vin(t) = vR(t) + vL(t)
Vmaxsen(ω t+ θv) = R i(t) + Ld(i(t))
dtVmax
Lsen(ω t+ θv) =
R
Li(t) +
d(i(t))
dt
que, segun el metodo de Lagrange visto anteriormente, la solucion integralde esta ODE tiene la forma
i(t) = K e−RLt + e−
RLt ·∫e
RLtVmax
Lsen(ω t+ θv) dt (3.39)
la funcion integral de (3.39) se encuentra resolviendo la integral por partes5, haciendo
du = eRLtdt ⇒ u =
L
Re
RLt
v =Vmax
Lsen(ω t+ θv) ⇒ dv = ω
Vmax
Lcos(ω t+ θv)dt (3.40)
y reemplazando en la integral queda∫e
RLtVmax
Lsen(ω t+ θv) dt =
L
Re
RLt · Vmax
Lsen(ω t+ θv)−
∫L
Re
RLt · ωVmax
Lcos(ω t+ θv)dt (3.41)
Esta nueva integral en el segundo miembro de (3.41) se resuelve tambienpor partes quedando
∫e
RLtVmax
Lsen(ω t+ θv) dt =
L
Re
RLt · Vmax
Lsen(ω t+ θv)−
[L2
R2e
RLt · ω Vmax
Lcos(ω t+ θv)+
ω2L2
R2
∫e
RLtVmax
Lsen(ω t+ θv) dt
](3.42)
5∫
u dv = u v −∫
v du

3.8. ALIMENTACION CON FUENTE SINUSOIDAL. CORRIENTE ALTERNA67
Finalmente, como esta utlima integral tiene la misma forma que la del primermiembro, se halla la solucion por asociacion de terminos
(1 +
ω2L2
R2
)∫e
RLt Vmax
Lsen(ω t+ θv) dt =
L
Re
RLt · Vmax
Lsen(ω t+ θv)−
L2
R2e
RLt · ω Vmax
Lcos(ω t+ θv) (3.43)
es decir∫e
RLtVmax
Lsen(ω t+ θv) dt =
1
1 + ω2L2
R2
[L
Re
RLt · Vmax
Lsen(ω t+ θv)−
L2
R2e
RLt · ω Vmax
Lcos(ω t+ θv)
](3.44)
∫e
RLtVmax
Lsen(ω t+ θv) dt =
Vmax eRLt
R2 + ω2L2[R sen(ω t+ θv)−
ωL cos(ω t+ θv)] (3.45)
Volviendo ahora a la (3.39) de la corriente con este resultado se tiene
i(t) = K e−RLt + e−
RLt · Vmax e
RLt
R2 + ω2L2[R sen(ω t+ θv)− ωL cos(ω t+ θv)]
i(t) = K e−RLt +
Vmax
R2 + ω2L2[R sen(ω t+ θv)− ωL cos(ω t+ θv)] (3.46)
para reducir esta ultima ecuacion se puede utilizar la igualdad trigonometri-ca
a sen(x)− b cos(x) =√a2 + b2 sen
(x− arctan
b
a
)(3.47)
entonces (3.46) queda
i(t) = K e−RLt +
Vmax
R2 + ω2L2
√R2 + ω2L2 sen(ω t+ θv − arctan
ωL
R)
i(t) = K e−RLt +
Vmax√R2 + ω2L2
sen(ω t+ θv − arctanωL
R) (3.48)
Esta solucion general representa la evolucion de la corriente para todot > 0, para considerar el caso particular se debe calcular la constante K. Eneste caso la corriente en t = 0 es nula, entonces
i(0t) = K +Vmax√
R2 + ω2L2sen(θv − arctan
ωL
R) = 0⇒
K = − Vmax√R2 + ω2L2
sen(θv − arctanωL
R) (3.49)

68 CAPITULO 3. SISTEMAS DE PRIMER Y SEGUNDO ORDEN
Finalmente
i(t) = − Vmax√R2 + ω2L2
sen(θv − arctanωL
R) e−
RLt +
+Vmax√
R2 + ω2L2sen(ω t+ θv − arctan
ωL
R) (3.50)
que es el resultado particular para este circuito RL serie.En la figura 3.15 pueden verse las graficas de la respuesta completa de
corriente (en color negro) junto con las respuestas natural y forzada (en colorgris), la grafica en lıneas de puntos representa la excitacion.
t[s]
i(t)[A]
Figura 3.15: Corriente en un RL serie alimentado con una fuente de tensionsenoidal
3.9. Sistemas de segundo orden
Si consideramos la interaccion entre dos elementos almacenadores deenergıa deberemos utilizar una ODE de 2 orden para describir su com-portamiento. Cada elemento almacenador introduce una condicion inicialindependiente en el sistema, por lo que sera necesario contar con dos solu-ciones naturales que permitan satisfacer ambas condiciones iniciales. Comose vera a continuacion, estas dos soluciones naturales son las dos solucionesgenerales de la ODE homogenea que describe el circuito.
Comencemos el analisis utilizando como ejemplo un circuito paraleloRLC como el de la fig. 3.16, para este circuito la ecuacion de nudo segun
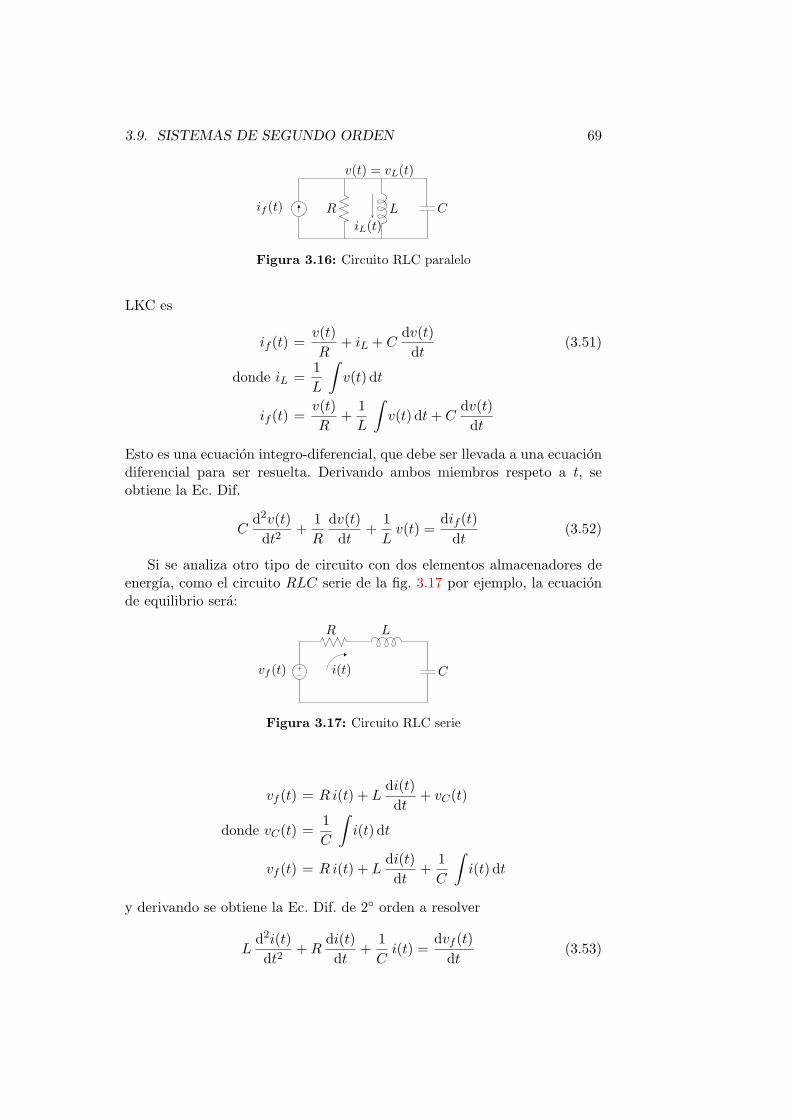
3.9. SISTEMAS DE SEGUNDO ORDEN 69
if (t)
v(t) = vL(t)
iL(t)
CR L
Figura 3.16: Circuito RLC paralelo
LKC es
if (t) =v(t)
R+ iL + C
dv(t)
dt(3.51)
donde iL =1
L
∫v(t) dt
if (t) =v(t)
R+
1
L
∫v(t) dt+ C
dv(t)
dt
Esto es una ecuacion integro-diferencial, que debe ser llevada a una ecuaciondiferencial para ser resuelta. Derivando ambos miembros respeto a t, seobtiene la Ec. Dif.
Cd2v(t)
dt2+
1
R
dv(t)
dt+
1
Lv(t) =
dif (t)
dt(3.52)
Si se analiza otro tipo de circuito con dos elementos almacenadores deenergıa, como el circuito RLC serie de la fig. 3.17 por ejemplo, la ecuacionde equilibrio sera:
vf (t) i(t) C
R L
Figura 3.17: Circuito RLC serie
vf (t) = R i(t) + Ldi(t)
dt+ vC(t)
donde vC(t) =1
C
∫i(t) dt
vf (t) = R i(t) + Ldi(t)
dt+
1
C
∫i(t) dt
y derivando se obtiene la Ec. Dif. de 2 orden a resolver
Ld2i(t)
dt2+R
di(t)
dt+
1
Ci(t) =
dvf (t)
dt(3.53)

70 CAPITULO 3. SISTEMAS DE PRIMER Y SEGUNDO ORDEN
vf (t) i(t) L2
L1
R1
R2
Figura 3.18: Circuito irreductible con dos elementos que almacenan energıa
De igual forma, con dos elementos del mismo tipo como el circuito RLde la fig. 3.18, se obitene una Ec.Dif. de segundo orden. Este analisis se dejacomo ejercicio para el lector.
Notese que en cada ejemplo anterior la Ec.Dif. puede ser planteada enterminos de cualquier parametro del circuito, por ejemplo si en la (3.51)se pone la tension del circuito en terminos de la corriente por el inductorentonces
v(t) = vL(t) = LdiLdt
if (t) =1
RLdiLdt
+ iL + Cd
dt
[LdiLdt
]
if (t) =L
R
diLdt
+ iL + CLd2iLdt2
la ODE queda en terminos de la corriente por el inductor.
3.9.1. Solucion natural
Consideremos el circuito de la figura 3.19, aplicando LKV para t > 0
t = 0 R
V0 vC(t) i(t) LC
Figura 3.19: Circuito RLC sin fuente
vR(t) + vL(t) + vC(t) = 0
Ri(t) + Ldi(t)
dt+ vC(t) = 0 (3.54)
y la corriente por el capacitor
i(t) = CdvC(t)
dt(3.55)

3.9. SISTEMAS DE SEGUNDO ORDEN 71
luego, de estas dos ecuaciones diferenciales de primer orden acopladas, po-demos obtener una unica ecuacion diferencial de segundo orden en terminode algunas de las variables de interes. En general se prefiere resolver enterminos de alguna de las variables contınuas del circuito, como la tensionen el capacitor vC(t) o la corriente por el inductor, puesto que son las quecumplen con la condicion de continuidad y por ende las que imponen lascondiciones iniciales.
Si llevamos la ec. (3.55) a la (3.54) tendremos
R
(CdvC(t)
dt
)+ L
d(C dvC(t)
dt
)
dt+ vC(t) = 0
RCdvC(t)
dt+ LC
d2vC(t)
dt2+ vC(t) = 0
d2vC(t)
dt2+
R
L
dvC(t)
dt+
1
LCvC(t) = 0 (3.56)
una ODE homogenea de segundo orden en terminos de vC(t). Resolviendoesta ODE se obtiene entonces la respuesta natural de la tension del capacitoren un sistema de segundo orden.
De igual forma se puede obtener la ODE en terminos de la corrientedespejando la tension vC(t) de la ec. (3.54) y llevandola a la (3.55)
i(t)− Cd(−Ri(t)− Ldi(t)
dt
)
dt= 0
i(t) +RCdi(t)
dt+ LC
d2i(t)
dt2= 0
d2i(t)
dt2+
R
L
di(t)
dt+
1
LCi(t) = 0 (3.57)
Solucion a una ODE homogenea de segundo orden
La respuesta que se obtiene de circuitos como el anterior, al igual quapara los circuitos de primer orden, se la llama respuesta natural, porque esuna respuesta que depende exclusivamente de la naturaleza del sistema yexiste incluso sin la presencia de fuentes forzantes. La respuesta natural deun sistema de segundo orden viene dada entonces por una ODE homogeneade segundo orden, cuya solucion puede encontrarse como sigue.
Sea la ODE
a2dt2x(t)
dt2+ a1
dx(t)
dt+ a0x(t) = 0
d2x(t)
dt2+ p
dx(t)
dt+ qx(t) = 0 (3.58)
se propone como solucion la funcion exponencial, esta funcion tiene la par-ticularidad de relacionar la primitiva con sus n derivadas y es por ende lasolucion por excelencia de una Ec. Dif.

72 CAPITULO 3. SISTEMAS DE PRIMER Y SEGUNDO ORDEN
xn(t) = Aest
con sus derivadas
dxn(t)
dt= As est
d2xn(t)
dt2= As2 est
donde A y s son constantes a determinar. Reemplazando la solucion pro-puesta y sus derivadas en la (3.58) queda
As2 est + pA s est + q A est = 0
Aest(s2 + p s+ q
)= 0
es decir que para que la funcion propuesta sea solucion, este producto debeser cero para cualquier t, y como Aest es la solucion propuesta y no puedeser cero para todo t, entonces
s2 + p s+ q = 0 (3.59)
lo que se conoce como ecuacion caracterıstica. Esta ecuacion es en la va-riable s, que es el exponente de la solucion propuesta. Entonces la solucionpropuesta sera solucion de la (3.58) si y solo si el exponente s es raız de laecuacion caracterıstica (ec. 3.59)
s1 =−p2
+
√(p2
)2− q ; s2 =
−p2−√(p
2
)2− q
(3.60)
Normalmente suelen denotarse como
s1 = −α+√α2 − ω2
0 ; s2 = −α−√α2 − ω2
0
donde α se llama coeficiente de amortiguamiento y ω0 frecuencia resonante.La solucion completa de (3.58) sera
xn(t) = A1 es1t +A2 e
s2t (3.61)
Es decir que la respuesta natural dependera de las raıces de la ecuacioncaracterıstica, y sera distinta segun las raıces sean a) reales y distintas, b)reales e iguales o c) complejas conjugadas. Analizaremos a continuacion cadauno de los casos.

3.9. SISTEMAS DE SEGUNDO ORDEN 73
Raıces reales y distintas
Si las raıces s1 y s2 son raıces reales y distintas, es decir que
s1 = −α+√α2 − ω2
0
s2 = −α−√α2 − ω2
0
con α2 > ω20, entonces la respuesta completa de la Ec. Dif. homogenea viene
dada por
xn(t) = A1 es1t +A2 e
s2t (3.62)
que es la respuesta natural del sistema y tendra la forma de la fig. 3.20a.Esta respuesta se la llama respuesta sobreamortiguada, las raıces s1 y s2reciben el nombre de frecuencias naturales del sistema y sus inversas son lasconstantes de tiempo 1
s1y 1
s2.
t
xn(t)
(a) Respuesta sobreamortiguada
t
xn(t)
(b) Respuesta crıticamente amorti-guada
t
xn(t)
(c) Respuesta subamortiguada u os-cilatoria
Raıces reales e iguales
Si las raıces s1 y s2 de la ecuacion caracterıstica son raıces reales e iguales,es decir que
s1 = s2 = −α = −p
2(3.63)
esto ocurre cuando α2 = ω20, entonces
xn(t) = Aest (3.64)
y la respuesta natural queda ahora incompleta, ya que lo que antes erandos respuestas linealmente independientes (ec. 3.62), una exponencial conexponente s1 y otra con exponente s2, se transforman en una unica respuestaAest.

74 CAPITULO 3. SISTEMAS DE PRIMER Y SEGUNDO ORDEN
Como para que la respuesta de una Ec. Dif. de segundo orden este com-pleta se necesitan dos funciones respuestas linealmente independientes, sedebe buscar una segunda funcion linealmente independiente de la anterior(ec. 3.64) y sumarla a ella. Una forma de encontrar la nueva funcion eshaciendo que se cumpla el requisito de independencia lineal entre las res-puestas, es decir que se cumpla que
xn2(t)
xn1(t)= f(t) 6= cte
o bien
xn2(t) = f(t)xn1(t)
Para que la nueva respuesta propuesta xn2(t) sea tambien solucion delsistema, se debe reemplazar en la (ec. 3.58) y comprobar que satisface laigualdad, para esto se deriva sucesivamente la funcion propuesta dos vecesy se lleva a la ODE
xn2(t) = f(t)xn1(t) = f(t)Aest (3.65)
xn2(t) = f(t)Aest + f(t)As est
xn2(t) =(f(t) + f(t) s+ f(t) s+ f(t) s2
)Aest
reemplazando y sacando factor comun Aest se obtiene
Aest[f(t) + 2 f(t) s+ f(t) s2 +
+p(f(t) + f(t) s
)+ q f(t)
]= 0 (3.66)
igual que en el caso de raıces reales y distintas esta igualdad se debe satisfacerpara todo t, y como Aest no puede ser cero para todo t por ser la funcionpropuesta, debe ser cero entonces lo que queda entre corchetes
f(t) + 2 f(t) s+ f(t) s2 + p(f(t) + f(t) s
)+ q (f(t)) = 0 (3.67)
Agrupando en terminos de la f(t) y sus derivadas se tiene
f(t) + f(t) (2s+ p) + f(t)(s2 + p s+ q)
)= 0 (3.68)
como s es una raız de la ecuacion caracterıstica entonces s2+ p s+ q = 0, esdecir
f(t) + f(t) (2s+ p) = 0 (3.69)
ademas, segun la ec. 3.63, el coeficiente 2s + p es igual a cero por tratarsede raıces reales e iguales, finalmente
f(t) = 0 (3.70)

3.9. SISTEMAS DE SEGUNDO ORDEN 75
Una funcion cuya derivada segunda sea nula, debe tener como derivadaprimera una constante y debe ser por ende una funcion lineal. O sea f(t) =K1t+K2
Esto permite concluir diciendo que si se multiplica a la solucion xn1(t)por cualquier f(t) de la formaK1t+K2 se obtendra otra solucion linealmenteindependiente de la Ec. Dif. Entonces xn2(t) sera (ec. 3.65)
xn2(t) = (K1t+K2)Aest
xn2(t) = A1 est +A2 t e
st
pero la segunda solucion encontrada se compone de dos funciones linealmen-te independientes, es decir que esta es ya una solucion completa. Entonces
xn(t) = A1 est +A2 t e
st (3.71)
que es la solucion completa buscada. Este tipo de respuestas se llama res-
puesta crıticamente amortiguada y su forma se grafica en la fig. 3.20b.
Raıces complejas conjugadas
Si la ecuacion caracterısticas tiene raıces complejas conjugadas, es decirque α2 − ω2
0 < 0, entonces
s1 = −α+ jωn
s2 = −α− jωn
donde ωn =√ω20 − α2, que se conoce como frecuencia resonante amortigua-
da.Ahora las soluciones xn1(t) y xn2(t) formadas con los exponentes com-
plejos s1 y s2, son dos soluciones linealmente independientes pero complejas
xn(t) = A1 e(−α+jωn)t +A2 e
(−α−jωn)t
xn(t) = e−αt(A1 e
jωnt +A2 e−jωnt
)(3.72)
Utilizando la igualdad de Euler se puede poner la solucion en terminosde las funciones trigonometricas
xn(t) = e−αt ((A1 +A2) cos(ωnt) + j(A1 −A2) sen(ωnt))
Como las constantes A1 y A2 son constantes arbitrarias que deben serelegidas para complir con las condiciones iniciales del sistema, y como es-tas condiciones iniciales seran siempre valores reales, entonces las A1 y A2
deberan ser tales que sumadas den un numero real puro (A1 + A2 = B1) yrestadas un numero imaginario puro (A1 −A2 = −jB2), de tal forma que
xn(t) = e−αt (B1 cos(ωnt) + j (−jB2) sen(ωnt))
xn(t) = e−αt (B1 cos(ωnt) +B2 sen(ωnt))

76 CAPITULO 3. SISTEMAS DE PRIMER Y SEGUNDO ORDEN
es decir que del conjunto de funciones complejas representadas por (3.72)y que son solucion de la ODE homogenea de segundo orden solo tomamoslas que son reales puras, ya que nos interesa representar parametros fısicosreales.
A este tipo de respuesta se la llama respuesta submortiguada y es la queda el nombre a las dos anteriores. Se trata de una funcion trigonometricaque es atenuada por un exponencial e−αt, donde α se llama coeficiente deatenuacion y ωn es la frecuencia resonante amortiguada del sistema. Lagrafica de esta respuesta se puede ver en la fig. 3.20c.
3.9.2. Condicions iniciales
Un sistema de segundo orden tiene entonces dos condiciones iniciales quedeben ser satisfechas, una por cada elemento almacenador de energıa. Lasconstantes que acompanan a cada solucion natural deben ser establecidasde forma tal que la respuesta completa del sistema cumpla con estas doscondiciones iniciales. Es decir, debemos “particularizar” la respuesta.
Volviendo sobre el circuito RLC de la figura 3.19 y suponiendo por sim-plicidad que las raices del sistema son reales y distintas, la tension en elcapacitor dada por la ODE (3.56) sera
vC(t) = Aes1t +Bes2t (3.73)
en t = 0 la tension en el capacitor vale vC(0) = V0, pot lo tanto
vC(0) = A+B = V0 (3.74)
como la corriente por el inductor es nula, tambien lo sera la corriente por elcapacitor para t > 0, entonces
iL(0) = iC(0) = CdvC(t)
dt
∣∣∣∣t=0
= 0 (3.75)
= C (As1 +Bs2) = 0 (3.76)
y de las ecuaciones (3.74) y (3.76) se obtienen A y B para cumplir con ambascondiciones iniciales.
Si observamos la ecuacion (3.75) vemos que la segunda condicion inicialesta determinando la pendiente de la respuesta de tension en t = 0, es decirque en un sistema de segundo orden las condiciones iniciales establecen elvalor y la pendiente inicial de cada respuesta. En la figura 3.20 se pueden verdos graficas de la respuesta vC(t), ambas tienen un valor inicial vC(0) = V0
con V0 > 0 pero la primera es para iL(0) = 0 y la segunda iL(0) = I0 conI0 > 0.

3.9. SISTEMAS DE SEGUNDO ORDEN 77
t
vC(t)
V0 iL(0) = 0
t
vC(t)
V0 iL(0) = I0
Figura 3.20: Respuesta de tension en un sistema de segundo orden.
3.9.3. Solucion forzada
Para el caso de sistemas de segundo orden o mas no es posible encon-trar la solucion completa utilizando el metodo de Lagrange propuesto paralos sistemas de primer orden, por lo que la solucion forzada (o la solucionparticular de la inhomogenea) debe buscarse utilizando otros metodos.
Encontrar la solucion forzada implica: del punto de vista matematicoencontrar una funcion que satisfaga la ODE inhomogenea, y del punto devista electrico resolver el regimen permanente del sistema.
Existen varios metodos para resolver el regimen permanente de un siste-ma sin necesidad de resolver en forma directa la ODE, estos metodos varıansegun la forma de la excitacion6 y seran objeto de estudio en capıtulos pos-teriores.
Los metodos para encontrar la respuesta de la ODE inhomogenea pro-puestos por el analisis matematico son varios, de todos vamos a utilizar elmetodo de los coeficientes indeterminados por ser el que mas se ajusta a lasformas de excitacion comunmente utilizadas en electricidad.
El metodo de los coeficientes indeterminados consiste en proponer comosolucion la suma de la funcion excitacion y todas sus derivadas, multiplican-do cada una de ellas por un coeficiente constante a determinar. El metodose basa en el hecho de que existe un conjunto de funciones que no cambiansu forma al ser derivadas, es decir al ser introducidas en una ODE. Esteconjunto de funciones esta formado por las funciones de forma polinomica,exponencial, sinusoidal y producto de estos tipos 7.
6Por ejemplo el metodo fasorial para resolver el regimen permanente de circuitos exci-tados con senales sinusoidales, o el analisis del comportamiento de los elementos ante unaexcitacion continua.
7Notar que la funcion constante esta incluida en el conjunto como caso particular defuncion polinomica, es decir una funcion polinomica de grado cero.

78 CAPITULO 3. SISTEMAS DE PRIMER Y SEGUNDO ORDEN
3.9.4. Soluciones linealmente dependientes
Como caso particular debe tenerse en cuenta que la solucion propuestano sea linealmente dependiente de las respuestas naturales del sistema. Estopuede ocurrir cuando la excitacion es de tipo exponencial pura o un pro-ducto de una exponencial con una sinusoidal. Consideremos por ejemplo lasiguiente ODE
d2x(t)
dt2+ p
dx(t)
dt+ q x(t) = Kest (3.77)
si s es una frecuencia natural del sistema tal que s2+ p s+ q = 0, una de lasdos respuestas naturales sera de la forma
xn1(t) = A1est (3.78)
entonces no puede proponerse xf (t) = Aest como solucion forzada ya quees LD de xn1(t). Para evitar esto se propone como solucion forzada xf (t) =tAest, que llevada a (3.77)
(s2tAest − 2sAest
)+ p
(Aest − stAe−st
)+ q
(tAest
)= Kest
tA(s2 − ps+ q) +A(p− 2s) = K (3.79)
y como s es raız de la ecuacion caracterıstica, nos queda
A =K
p− 2s(3.80)
y la solucion propuesta
xf (t) = tK
p− 2sest (3.81)
es solucion de la ODE.En general, si s es raız de la ecuacion caracterıstica con multiplicidad r,
la solucion forzada propuesta toma la forma xf (t) = trAest.En forma similar, si la excitacion tiene la forma de una sinusoidal ate-
nuada
f(t) = e−αt (A cos(ωnt) +B sin(ωnt)) (3.82)
y −α ± jωn son raıces de la ecuacion caracterıstica, entonces la solucionforzada propuesta sera
xf (t) = tre−αt (M cos(ωnt) +N sin(ωnt)) (3.83)
con r la multiplicidad del par de raıces −α± jωn
En la tabla 3.1 se listan las posibles excitaciones con sus soluciones for-zadas a proponer. Observese que los casos en que s = 0 y s = ±jωn seanraıces de la ecuacion caracterıstica implican una resistencia equivalente nulaen el sistema (R = 0), estos casos particulares solo pueden darse en sistemasideales o sistemas no lineales.
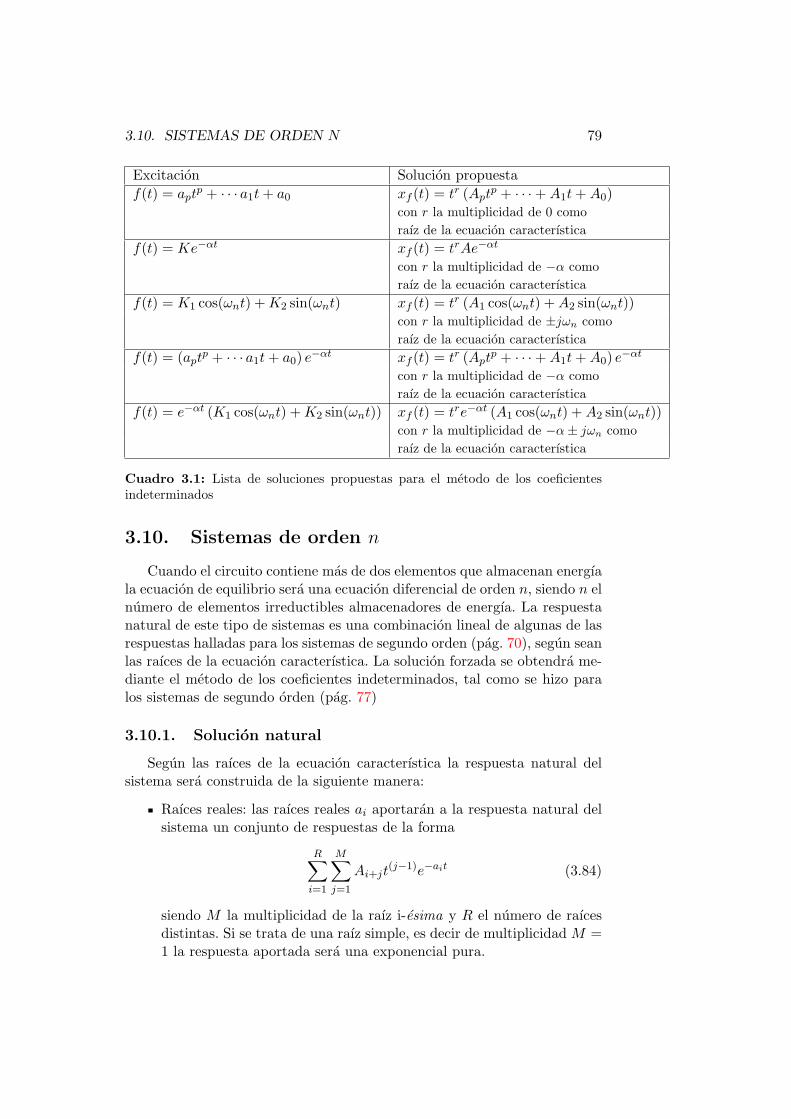
3.10. SISTEMAS DE ORDEN N 79
Excitacion Solucion propuesta
f(t) = aptp + · · · a1t+ a0 xf (t) = tr (Apt
p + · · ·+A1t+A0)con r la multiplicidad de 0 como
raız de la ecuacion caracterıstica
f(t) = Ke−αt xf (t) = trAe−αt
con r la multiplicidad de −α como
raız de la ecuacion caracterıstica
f(t) = K1 cos(ωnt) +K2 sin(ωnt) xf (t) = tr (A1 cos(ωnt) +A2 sin(ωnt))con r la multiplicidad de ±jωn como
raız de la ecuacion caracterıstica
f(t) = (aptp + · · · a1t+ a0) e
−αt xf (t) = tr (Aptp + · · ·+A1t+A0) e
−αt
con r la multiplicidad de −α como
raız de la ecuacion caracterıstica
f(t) = e−αt (K1 cos(ωnt) +K2 sin(ωnt)) xf (t) = tre−αt (A1 cos(ωnt) +A2 sin(ωnt))con r la multiplicidad de −α± jωn como
raız de la ecuacion caracterıstica
Cuadro 3.1: Lista de soluciones propuestas para el metodo de los coeficientesindeterminados
3.10. Sistemas de orden n
Cuando el circuito contiene mas de dos elementos que almacenan energıala ecuacion de equilibrio sera una ecuacion diferencial de orden n, siendo n elnumero de elementos irreductibles almacenadores de energıa. La respuestanatural de este tipo de sistemas es una combinacion lineal de algunas de lasrespuestas halladas para los sistemas de segundo orden (pag. 70), segun seanlas raıces de la ecuacion caracterıstica. La solucion forzada se obtendra me-diante el metodo de los coeficientes indeterminados, tal como se hizo paralos sistemas de segundo orden (pag. 77)
3.10.1. Solucion natural
Segun las raıces de la ecuacion caracterıstica la respuesta natural delsistema sera construida de la siguiente manera:
Raıces reales: las raıces reales ai aportaran a la respuesta natural delsistema un conjunto de respuestas de la forma
R∑
i=1
M∑
j=1
Ai+jt(j−1)e−ait (3.84)
siendo M la multiplicidad de la raız i-esima y R el numero de raıcesdistintas. Si se trata de una raız simple, es decir de multiplicidad M =1 la respuesta aportada sera una exponencial pura.

80 CAPITULO 3. SISTEMAS DE PRIMER Y SEGUNDO ORDEN
Raıces complejas conjugadas: las raıces complejas conjugadas−αi±jωi
aportaran a la respuesta natural del sistema un conjunto de respuestasde la forma
C∑
i=1
M∑
j=1
t(j−1)e−αit (Bi+j cos(ωi) + Ci+j sin(ωi)) (3.85)
siendo M la multplicidad de la i-esima raız compleja y C el numerode pares de raıces complejas conjugadas distintas.
El numero de soluciones LI aportado por las raıces de la ecuacion carac-terıstica debe ser igual al orden de la ecuacion diferencial. Por ejemplo, paraun sistema de orden 5 con ecuacion caracterıstica
(s+ 2)3(s+ 5)(s+ 8) = 0 (3.86)
tendra como respuesta natural
xnatural(t) = A1e−2t +A2te
−2t +A3t2e−2t +A4e
−5t +A5e−8t (3.87)
.

3.10. SISTEMAS DE ORDEN N 81
Ejercitacion
1. Hallar y graficar la respuesta i(t) para t > 0 de la fig. 3.21. Demostraren cada caso, la validez del reemplazo de elementos por uno equiva-lente.
i(t)18V
t = 0 3Ω
2Ω
1H
5H 20H
Figura 3.21: Encontrar i(t)∀t > 0
2. Hallar y graficar la respuesta vC(t) para t > 0 de la fig. 3.22, si estuvoconectado a la fuente por un tiempo suficientemente grande como paraconsiderar extinguido el regimen transitorio.
vC(t)80V
t = 0
4KΩ
12KΩ 30Ω
200mH
0, 1F
Figura 3.22: Hallar vC(t)∀t > 0
3. Hallar la respuesta iL(t) del circuito de la fig. 3.23 si iL(0) = 3A
iL(t)80V
t = 0
10mH4Ω
4Ω
Figura 3.23: Hallar i(t) para t > 0
4. El capacitor de la fig. 3.24 tiene una carga inicial de q0 = 800×10−6Ccon la polaridad indicada. Hallar la respuesta completa de la tensiondel capacitor, y la evolucion de las cargas con el tiempo.
q080V i(t)
t = 0 t = 010Ω
4µF
Figura 3.24: Respuesta completa de la tension en el capacitor
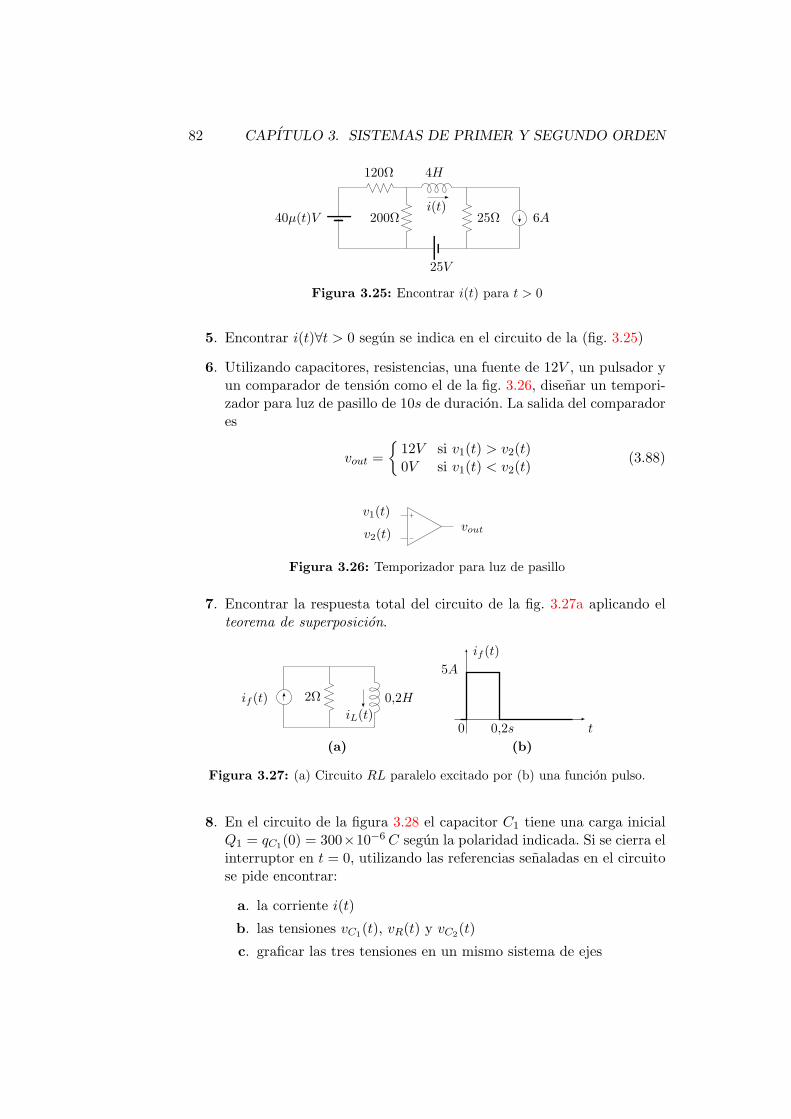
82 CAPITULO 3. SISTEMAS DE PRIMER Y SEGUNDO ORDEN
40µ(t)Vi(t)
200Ω
120Ω 4H
6A25Ω
25V
Figura 3.25: Encontrar i(t) para t > 0
5. Encontrar i(t)∀t > 0 segun se indica en el circuito de la (fig. 3.25)
6. Utilizando capacitores, resistencias, una fuente de 12V , un pulsador yun comparador de tension como el de la fig. 3.26, disenar un tempori-zador para luz de pasillo de 10s de duracion. La salida del comparadores
vout =
12V si v1(t) > v2(t)0V si v1(t) < v2(t)
(3.88)
v1(t)
v2(t)vout
Figura 3.26: Temporizador para luz de pasillo
7. Encontrar la respuesta total del circuito de la fig. 3.27a aplicando elteorema de superposicion.
if (t) 2Ω 0,2H
iL(t)
(a)
if (t)
5A
0,2s0 t
(b)
Figura 3.27: (a) Circuito RL paralelo excitado por (b) una funcion pulso.
8. En el circuito de la figura 3.28 el capacitor C1 tiene una carga inicialQ1 = qC1
(0) = 300×10−6C segun la polaridad indicada. Si se cierra elinterruptor en t = 0, utilizando las referencias senaladas en el circuitose pide encontrar:
a. la corriente i(t)
b. las tensiones vC1(t), vR(t) y vC2
(t)
c. graficar las tres tensiones en un mismo sistema de ejes

3.10. SISTEMAS DE ORDEN N 83
C1
R
C2qC1(t)
t = 0
i(t)vC1
vR
vC2
C1 = 6µF
R = 20Ω
C2 = 3µF
Figura 3.28: Evolucion de la tension natural en un par de capacitores
9. En el circuito de la fig. 3.29a se conecta el capacitor a la fuente de20V en t = 0 (posicion 1), cuando la carga del capacitor llega a 15Vse cambia el interruptor conectando la fuente de 10V (posicion 2).Siendo la respuesta de la tension del capacitor vC(t) la del grafico dela fig. 3.29b, calcular el tiempo t = t′ del cambio de interruptor, y laresistencia Rx del circuito.
10V 20V500µF
vC(t)
1,6KΩ Rx12
(a)
10
20
2 4 6 8 10
t = t′t[s]
vC(t)[V ]
(b)
Figura 3.29: Calcular el tiempo t = t′ en el que conmuta el circuito
10. Hallar para t > 0 la i(t) mostrada en la fig. 3.30
i(t)40V t = 0 4Ω
5Ω
1H1A
0, 5F
Figura 3.30: Encontrar i(t) para t > 0
11. Encontrar y graficar la tension y corriente en la resistencia de cargadel circuito de la fig. 3.31 para todo t > 0.
12. En el circuito de la figura 3.32, encontrar y graficar la corriente iL(t)para todo t > 0
13. Seleccione un valor de L tal que el voltaje del solenoide supere los20V , y la magnitud de la corriente del inductor este por encima de

84 CAPITULO 3. SISTEMAS DE PRIMER Y SEGUNDO ORDEN
18V
i(t)
10µFvcarga(t)
80Ω
100Ω
t = 0
Figura 3.31: Encontrar y graficar la tension y corriente en R
30V
10Ω
10Ω2H
iL(t)
t = 0
Figura 3.32: Respuesta completa de corriente en RL serie
los 500mA durante los primeros 25ms. Calcular ademas la energıaalmacenada en la bobina en el momento que se abre el interruptor(fig. 3.33)
60V
t = 0
10Ω
15Ω
L vL(t)
10Ω
Figura 3.33: Calcular el valor de L
14. Del circuito de la figura 3.34 determinar para t = 0+ los valores vC(0+),
vL(0+), iC(0
+) e iL(0+) segun las referencias que se indican en el
circuito. En t = 0 el angulo de fase de la alimentacion es θ = 60.
150 cos(200t+ θ)
t = 0
vR
vL
vCiL iC
R = 22Ω
C = 0, 1µF
L = 100mH
Figura 3.34: Hallar los valores iniciales de tension y corriente
15. El circuito de la fig. 3.35 se conecta en t = 0, encontrar la respuestavC(t) para t > 0

3.10. SISTEMAS DE ORDEN N 85
iin
t = 0
vR(t)vC(t)
iin = 10 sen(2π50 t)
C = 10000µF
R = 20Ω
Figura 3.35: Encontrar vC(t) para t > 0
16. En un circuito como el de la figura 3.36 con dos elementos que alma-cenan energıa, se conoce como resistencia crıtica Rc al valor resistivopara el cual la respuesta del circuito es crıticamente amortiguada. En-contrar dicho valor crıtico de resistencia para que vC(t) en el siguientecircuito sea crıticamente amortiguada.
V
t = 0
Rc
CL1
L2
vC(t)
Datos
C = 2000µF
L1 = 18mH
L2 = 32mH
Figura 3.36: Resistencia crıtica
17. Encontrar la respuesta completa de tension de cada componente delcircuito de la fig. 3.37. En t = 0 el angulo de fase de la alimentaciones θ = 30.
150 cos(200t+ θ)
t = 0
vRLvRC
vL vCiL iC
RL = 22Ω
RC = 22Ω
C = 0, 1µF
L = 100mH
Figura 3.37: Encontrar las tensiones de cada elemento para t > 0
18. Hallar, utilizando el metodo de superposicion, la corriente iL(t) y latension vC(t) de la figura 3.38 para t > 0.
iL(t)
12V
t = 0
24Ω 15Ω100mH
65 sen(100t)vC(t)500µF
Figura 3.38: Encontrar iL(t) y vC(t) para t > 0

86 CAPITULO 3. SISTEMAS DE PRIMER Y SEGUNDO ORDEN
19. Determinar la tension del capacitor de la fig. 3.39 para t > 0 si al abrirel interruptor en t = 0 el angulo de fase de la alimentacion es θ = 60.
150 cos(200t+ θ)
iL iC
t = 0
vC
22Ω 0,1µF
100mH
Figura 3.39: Hallar la tension del capacitor
20. Encontrar la respuesta completa de tension en el capacitor y corrienteen el inductor para t > 0 del circuito de la figura 3.40. Indicar el tipode amortiguamiento del sistema y graficar las respuestas obtenidas.Realizar un analisis detallado del metodo de resolucion.
2Ω
1H
0,1F
i(t)
10V
t = 0
Figura 3.40: Calculo de la respuesta natural
21. Determinar la tension del capacitor vC(t) y la corriente i(t) del circuitode la figura 3.41 para todo t > 0 si el interruptor se conecta a laposiscion 1 en t = 0 y se pasa a la posicion 2 en t = 1s
60 e−2t i(t)
1
2 vC(t)
100Ω25Ω
1mF
Figura 3.41: Circuito RC con fuente exponencial
22. Se encuentra que las ecuaciones de equilibrio de un circuito de 2 ordenson
v(t) + 8i(t) + 2di(t)
dt= 0 ; i(t) =
1
6
dv(t)
dt
de donde la respuesta general de corriente es i(t) = Ae−t +B e−3t. Sii(0) = 1A y v(0) = 10V , hallar las constantes A y B.

3.10. SISTEMAS DE ORDEN N 87
23. Encontrar la corriente iL(t) y la tension vC(t) del circuito de la fig.3.42 para todo t > 0 segun las referencias.
16Ω
2H
130F10e−2tu(t)
iL(t)
vC(t)
Figura 3.42: Circuito RLC con fuente de corriente
24. Calcular vC(t) para t > 0 segun la referencia indicada en el circuito dela fig. 3.43
t = 0
t = 0
25Ω
1H
50mFvC(t)
50V
100V
Figura 3.43: Circuito RLC con excitacion constante
25. Encontrar la respuesta completa de la tension vC(t) para t > 0 delcircuito de la fig. 3.44 operando en el dominio del tiempo
t = 0 5000Ω
200H 10µF vC(t)10 cos(10t)
Figura 3.44: Circuito RLC excitado con senal sinusoidal
26. En el circuito de la fig. 3.45 encontrar y graficar la corriente iL(t) paratodo t > 0
27. Encontrar la respuesta iL(t) para t > 0 segun las referencias de la fig.3.46
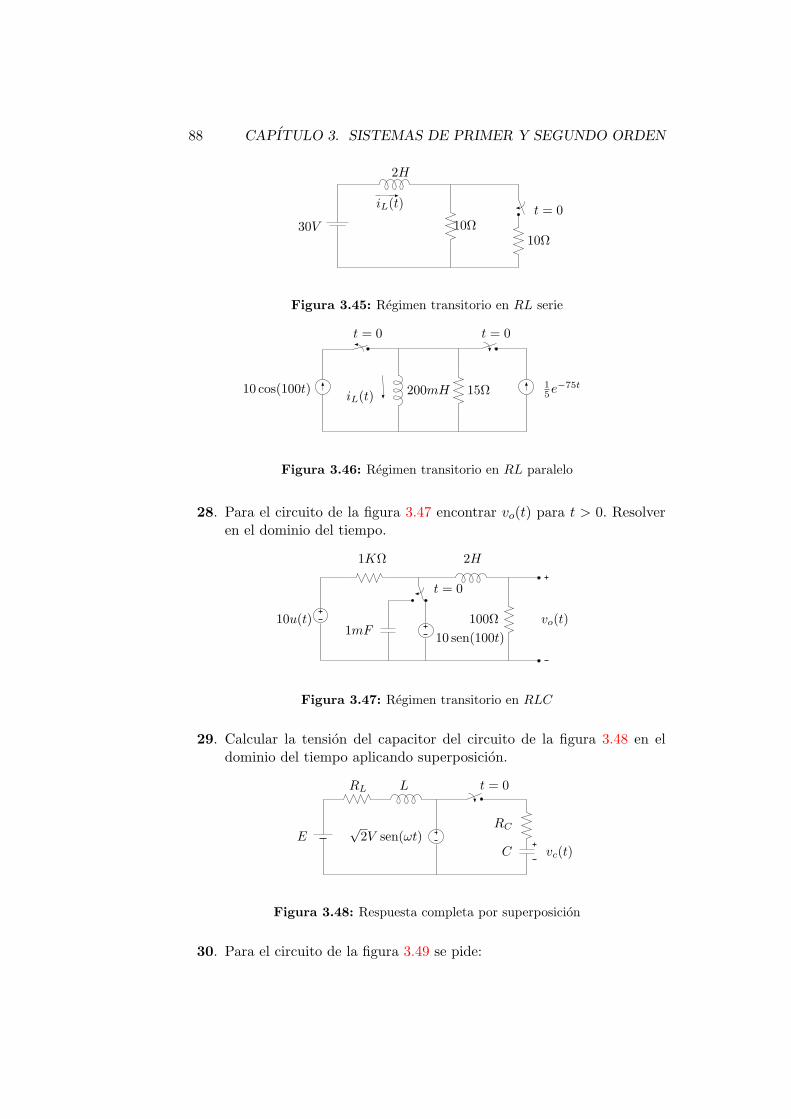
88 CAPITULO 3. SISTEMAS DE PRIMER Y SEGUNDO ORDEN
30V 10Ω10Ω
2H
iL(t) t = 0
Figura 3.45: Regimen transitorio en RL serie
10 cos(100t) 15e
−75t15Ω200mHiL(t)
t = 0 t = 0
Figura 3.46: Regimen transitorio en RL paralelo
28. Para el circuito de la figura 3.47 encontrar vo(t) para t > 0. Resolveren el dominio del tiempo.
10u(t)
10 sen(100t)
vo(t)
1KΩ
100Ω
2H
1mF
t = 0
Figura 3.47: Regimen transitorio en RLC
29. Calcular la tension del capacitor del circuito de la figura 3.48 en eldominio del tiempo aplicando superposicion.
E√2V sen(ωt)
vc(t)
RL
RC
L
C
t = 0
Figura 3.48: Respuesta completa por superposicion
30. Para el circuito de la figura 3.49 se pide:

3.10. SISTEMAS DE ORDEN N 89
Encontrar la corriente iL(t) para t > 0
Calcular el valor eficaz del regimen permanente de esta corriente
90 sen(100t)V 3A
1Ω
18Ω
0,2H
t = 0
iL(t)
Figura 3.49: Corriente en el inductor
31. En el circuito de la figura 3.50 se pide:
a. calcular la tension del capacitor vC(t) para t > 0.
b. deducir del circuito cual es el valor de la tension del capacitorvc(t) para t = 0 y para t → ∞, verificando que se cumple conestos valores en la expresion de vC(t) obtenida antes.
100Ω 200Ωt = 0
10V
20u(t)
vC(t)10µF 100mH
Figura 3.50: Circuito con respuesta transitoria
32. En el circuito de la figura 3.51 se pide:
a. calcular la tension del capacitor vC(t) para t > 0.
b. deducir del circuito cual es el valor de la tension del capacitorvc(t) para t = 0 y para t → ∞, verificando que se cumple conestos valores en la expresion de vC(t) obtenida antes.
33. En el circuito de la figura 3.52 se pide encontrar la corriente por elinductor aplicando superposicion.

90 CAPITULO 3. SISTEMAS DE PRIMER Y SEGUNDO ORDEN
100Ω 200Ωt = 0
60√2 cos(ωt+ 10)
20u(t)
vC(t)10µF 100mH
Figura 3.51: Circuito con respuesta transitoria
10Ω
20Ω 20Ω
20Ω
10
40√2 cos(10t)u(t)2u(t)
iL(t)1H
Figura 3.52: Circuito RL con condiciones iniciales.
Soluciones
Ejercicio 1 Planteo y Resolucion numerica
Aplicando LKV en la malla que circula i(t) para t > 0
(2Ω)i(t) + (3Ω)i(t) + (1H)di(t)
dt+ vP (t) = 0 (3.89)
donde vP (t) es la tension de los inductores en paralelo. Para encontraresta tension llamemos ia(t) e ib(t) a las corrientes que atraviesan losinductores de 5H y 20H respectivamente. Entonces, en el nudo secumple que
i(t) = ia(t) + ib(t)
i(t) =1
5H
∫vP (t)dt+
1
20H
∫vP (t)dt =
(1
5H+
1
20H
)∫vP (t)dt
(1
15H + 1
20H
)i(t) =
∫vP (t)dt
(1
15H + 1
20H
)di(t)
dt= vP (t)
3.10. SISTEMAS DE ORDEN N 91
y se obtiene la tension vP (t) para reemplazar en la ec. 3.89
(2Ω)i(t) + (3Ω)i(t) + (1H)di(t)
dt+
(1
15H + 1
20H
)di(t)
dt= 0 (3.90)
Agrupando terminos en (3.90) se ve que la malla puede ser reemplazadapor dos elementos equivalentes, uno resistivo de valor
Req = 2Ω + 3Ω
y uno inductivo de valor
Leq = 1H +1
15H + 1
20H
es decir, la ec. 3.90 puede escribirse como
(5Ω)i(t) + (5H)di(t)
dt= 0
Ası tenemos finalmente la Ec.Dif. a resolver. Esta Ec.Dif. homgenea,de primer orden y coeficientes constantes tiene como solucion generaluna funcion exponencial de forma
i(t) = i(0)e−Req
Leqt
en este caso conReq
Leq= 1
i(t) = i(0)e−t
i(0) es el valor de la corriente al momento de abrir el interruptor, estaconstante se conoce con el nombre de valor inicial.
Para particularizar esta respuesta se debe encontrar este valor inicial.Para esto se aplica la condicion de continuidad de corriente en el in-ductor, por la cual se puede decir que la corriente que circula por lamalla un infinitesimo de tiempo despues de abierto el interruptor esigual a la corriente que circulaba un infinitesimo de tiempo antes
i(0−) = i(0+)
Para conocer la corriente que circulaba antes de que se abra el inte-rruptor se debe observar el circuito en t = 0−. En ese tiempo los in-ductores estaban totalmente cargados pues se encontraban conectadosa la fuente un tiempo suficientemente largo. Por lo tanto la corriente

92 CAPITULO 3. SISTEMAS DE PRIMER Y SEGUNDO ORDEN
que provoca la fuente de 18V solo se ve limitada por los resistores.Entonces
i(0−) =18
3= 6A
y finalmente la corriente i(t) ∀t > 0 es
i(t) = 6e−t
cuya grafica puede verse en la fig. 3.53.
1
2
3
4
5
6
1 2 3 4 5 6
i(0)
t[s]
i(t)[A]
Figura 3.53: Corriente total del ejercicio 1.
Ejercicio 8 Planteo
Teniendo en cuenta las referencias elegidas para tensiones y corriente,se plantea la LKV obteniendose
vC1(t) + vR(t) + vC2
(t) = 0 (3.91)
por ser todas caıdas de tension. Las tensiones en cada capacitor puedeexpresarse tambien en terminos de la corriente de malla i(t), puesto

3.10. SISTEMAS DE ORDEN N 93
que
vC1=
1
C1
∫i(t)dt
vC2=
1
C2
∫i(t)dt
llevando a (3.91) y poniendo la tension en R tambien en funcion dei(t) queda
1
C1
∫i(t)dt+R i(t) +
1
C2
∫i(t)dt = 0 (3.92)
La (3.92) es una ecuacion integro-diferencial, que para resolverla sedebe derivar ambos miembros respecto a t
1
C1i(t) +R
di(t)
dt+
1
C2i(t) = 0
di(t)
dt+
1
R
(1
C1+
1
C2
)i(t) = 0 (3.93)
el factor 1C1
+ 1C2
se puede reemplazar por un unico factor 1C
donde
1
C=
1
C1+
1
C2(3.94)
entonces (3.93) queda
di(t)
dt+
i(t)
RC= 0 (3.95)
Esta ecuacion diferencial se puede resolver separando variables. Multi-plicando ambos miembros de (3.95) por dt, dividiendo por i(t) y luegodespejando
dt
i(t)
(di(t)
dt+
i(t)
RC
)= 0
di(t)
i(t)+
i(t)
RCdt = 0
di(t)
i(t)= − 1
RCdt
integrando ambos miembros∫
1
i(t)di(t) = −
∫1
RCdt
ln i(t) +Ka = − 1
RCt+Kb
ln i(t) = − 1
RCt+Kc (3.96)

94 CAPITULO 3. SISTEMAS DE PRIMER Y SEGUNDO ORDEN
donde la constante Kc = Kb −Ka agrupa ambas constantes de inte-gracion. La (3.96), por definicion de logaritmo, puede ponerse
i(t) = e−1
RCt+Kc = e−
1RC
teKc
i(t) = e−1
RCtK0 (3.97)
Esta es la solucion general de la respuesta i(t) buscada, como se ve esindependiente de las cargas iniciales de los capacitores. La constanteK0 permite particularizar la respuesta a cada caso, puesto que en t = 0se ve que i(0) = K0.
En este caso particular, analizando en t = 0 la (3.91)
vC1(0) + vR(0) + vC2
(0) = 0
como vC2(0) = 0, entonces la corriente inicial sera
vC1(0) = −vR(0) = −i(0)R
i(0) =−vC1
(0)
R
La tension inicial en el capacitor C1 esta dada por su carga inicial,vC1
(0) = −Q1
C1. El signo negativo se debe a que la polaridad de la carga
inicial es opuesta a la referencia de tension vC1. Entonces
i(0) =−(−Q1
C1
)
R
i(0) =Q1
RC1
que es la constante K0 para este caso particular. Reemplazando final-mente en (3.97) se obtiene la i(t) particular buscada
i(t) = i(0) e−1
RCt
i(t) =Q1
RC1e−
1RC
t
Las caıdas de tension en cada elemento pueden obtenerse de (3.91),donde
vC1(t) =
1
C1
∫Q1
RC1e−
1RC
t dt
vC1(t) =
1
C1
(−RC
Q1
RC1e−
1RC
t
)+K1 (3.98)

3.10. SISTEMAS DE ORDEN N 95
y
vC2(t) =
1
C2
∫Q1
RC1e−
1RC
t dt
vC2(t) =
1
C2
(−RC
Q1
RC1e−
1RC
t
)+K2 (3.99)
Para encontrar K1 y K2 se hace t = 0, donde vC1(0) = −Q1
C1y vC2
= 0
vC1(0) =
1
C1
(−Q1C
C1
)+K1 =
−Q1
C1
K1 =1
C1
(Q1C
C1
)− Q1
C1(3.100)
vC2(0) =
1
C2
(−Q1C
C1
)+K2 = 0
K2 =1
C2
(Q1C
C1
)(3.101)
Por ultimo, la caıda de tension en R es
vR(t) = R i(t) =Q1
C1e−
1RC
t (3.102)
Resolucion numerica
Recordando que 1C= 1
C1+ 1
C2se calcula primero el τ del sistema
τ = RC = 206× 10−6 3× 10−6
6× 10−6 + 3× 10−6= 40× 10−6
Reemplazando ahora en (3.98) por los datos numericos
i(t) =300× 10−6j
20 · 6× 10−6e−2,5×104t
i(t) = 2,5 e−2,5×104t (3.103)
Luego las constantes K1 y K2 de las tensiones (ecuaciones (3.100) y(3.101))
K1 =1
6× 10−6
(300× 10−6 · 2× 10−6
6× 10−6
)− 300× 10−6j
6× 10−6
K1 = −33,333
K2 =1
3× 10−6
(300× 10−6 · 2× 10−6
6× 10−6
)
K2 = 33,333

96 CAPITULO 3. SISTEMAS DE PRIMER Y SEGUNDO ORDEN
con estas constantes se obtienen las caıdas de tension vC1y vC2
(ecua-ciones (3.98) y (3.99))
vC1(t) =
1
6× 10−6
(−40× 10−6 300× 10−6
20 · 6× 10−6e−2,5×104t
)− 33,333
vC1(t) = −16,667 e−2,5×104t − 33,333 (3.104)
vC2(t) =
1
3× 10−6
(−40× 10−6 300× 10−6
20 · 6× 10−6e−2,5×104t
)+ 16, 667
vC2(t) = −33,333 e−2,5×104t + 33,333 (3.105)
y finalmente la caıda en R (ecuacion (3.102))
vR(t) =300× 10−6
6× 10−6e−2,5×104t
vR(t) = 50 e−2,5×104t (3.106)
En la fig. 3.54 se grafican las tres tensiones dadas por (3.104), (3.105)y (3.106) y la corriente (3.103)
20
40
-20
-40
10 20
vC1(t)
vC2(t)
vR(t)
i(t)
t[ms]
v(t)[V ]
Figura 3.54: Caıdas de tension en cada elemento y corriente total del ejercicio 8.
Ejercicio 16 Planteo
Para t > 0 la suma de las tensiones en la malla es
vC(t) + vL1(t) + vRc(t) + vL2
(t) = 0
vC(t) + L1di(t)
dt+Rc i(t) + L2
di(t)
dt= 0 (3.107)

3.10. SISTEMAS DE ORDEN N 97
la corriente en la malla i(t) con respecto a la tension en el capacitor es
i(t) = Cdvc(t)
dt(3.108)
de donde
di(t)
dt= C
d2vC(t)
dt2(3.109)
reemplazando la (3.108) y la (3.109) en (3.107) nos queda solo enfuncion de vC(t)
vC(t) + (L1 + L2)Cd2vC(t)
dt2+RcC
dvc(t)
dt= 0
d2vC(t)
dt2+
Rc
(L1 + L2)
dvc(t)
dt+
1
(L1 + L2)CvC(t) = 0
la ecuacion caracterıstica de esta ec. dif. es de la forma
s2 + p s+ q = 0 ⇒ s1−2 = −p
2±√p2 − 4 q
2
Para una respuesta criticamente amortiguada el discriminante de estaultima ecuacion debe ser cero, entonces debe ser
p2 = 4 q[
Rc
(L1 + L2)
]2= 4
1
(L1 + L2)C
R2c = 4
L1 + L2
C
Resolucion numerica
Reempalzando los valores de capacidad e inductancias segun los datos
R2c = 4
18× 10−3 + 32× 10−3
2× 10−3= 100
de donde finalmente
Rc = 10Ω

98 CAPITULO 3. SISTEMAS DE PRIMER Y SEGUNDO ORDEN
Ejercicio 19 Planteo
Para t > 0 la suma de las tensiones en la malla es
vL(t) + vR(t) = vC(t)
LdiL(t)
dt+R iL(t) = vC(t) (3.110)
la corriente por el capacitor iC(t) es igual −iL(t), entonces
iL(t) = −iC(t) = −CdvC(t)
dt(3.111)
llevando (3.111) a (3.110) nos queda
LCd2vC(t)
dt2+RC
dvC(t)
dt+ vC(t) = 0
d2vC(t)
dt2+
R
L
dvC(t)
dt+
1
LCvC(t) = 0 (3.112)
la ecuacion caracterıstica de esta ec. dif. es de la forma
s2 + p s+ q = 0 ⇒ s1−2 = −p
2±√
p2 − 4 q
2
con p = RL
y 1LC
.
Resolucion numerica
Reempalzando los valores de resistencia, capacidad e inductancias segunlos datos las raices de la ecuacion caracterıstica dan
s2 + 220s+ 100× 106 = 0
entonces
s1 = −110 + j9999,4
s2 = −110− j9999,4
la respuesta de (3.112) es subamortiguada y tiene la forma
vC(t) = e−110t (A cos(9999,4t) +B sin(9999,4t)) (3.113)
Para encontrar las constantes A y B se deben aplicar las condicionesiniciales del circutio. Al abrir el interruptor la tension de fuente vale
v(0) = 150 cos(60) = 75V

3.10. SISTEMAS DE ORDEN N 99
que es la tension inicial del capacitor, vC(0) = 75V . Llevado a 3.113nos da
vC(0) = 1(A+ 0) = 75V ⇒ A = 75V
Para calcular B se aplica la condicion inicial a la corriente iL(t), de3.114 tenemos
iL(t) = −C[−110e−110t (75 cos(9999,4t) +B sin(9999,4t))
+e−110t (−749955 sin(9999,4t) + 9999,4B cos(9999,4t))]
iL(t) = −Ce−110t [(9999,4B − 8250) cos(9999,4t)] + (−749955− 110B)
(3.114)
La corriente circulante por el inductor antes de abrir el interruptor sepuede encontrar por el metodo fasorial, ya que se trata de un sistemaalimentado por una senal sinusoidal en regimen permanente, entonces
IL =V
ZRL
=V
R+ jωL
IL =150/√2 6 60
22 + j20=
5,04√2
6 17,73 (3.115)
es decir que en t = 0 la corriente es
iL(0) = 5,04 cos(17,73) = 4,8A (3.116)
que llevado a (3.114) se encuentra B
iL(0) = −0,1× 10−6 (9999,4B − 8250) = 4,8A⇒ B = −4799,5(3.117)
Finalmente
vC(t) = e−110t (75 cos(9999,4t)− 4799,5 sin(9999,4t)) (3.118)
Ejercicio 33 Resolucion numerica
La corriente natural por el inductor es (pasivando todas las fuentes)
in(t) = Ae−Req
Lt = Ae−32t
donde Req = ((10 + 20)//20) + 20 = 32Ω.
Sea if1 la corriente forzada por el inductor que resulta de pasivar todaslas fuentes menos la de corriente
if1 = 2 · (10// (20 + 20//20)) (20//20)
(20 + 20//20) (20)=
1
4

100 CAPITULO 3. SISTEMAS DE PRIMER Y SEGUNDO ORDEN
Sea if2 la corriente forzada por el inductor que resulta de pasivar todaslas fuentes menos la fuente de tension de 10V
if2 = −10 20//20
(20 + 10 + 20//20) 20= −1
8
La corriente forzada por el inductor debido a la fuente cosenoidal vienedada por la solucion particular de la ODE no homogenea del circuitoen terminos de iL(t), es decir el regimen permantente de alterna en elinductor
if3 = 1,02 cos(10t− 17,4)
La respuesta general de corriente por el inductor sera entonces la sumade todas las forzadas mas la natural
iL(t) = in + if1 + if2 + if3
= Ae−32t + 0,25− 0,125 + 1,02 cos(10t− 17,4)
en t = 0 la unica corriente por L es debido a la fuente de 10V
iL(0) = −0,125 = A+ 0,25− 0,125 + cos(−17,4)⇒A = −1,204
La respuesta particular de corriente en el inductor es
iL = −1,204e−32t + 0,125 + cos(10t− 17,4) (3.119)
que se grafica en la figura 3.55
1
-110 20 30iL(0) = −0,125
t[s]
iL(t)[A]
Figura 3.55: Corriente total en el inductor, ecuacion (3.119).
Capıtulo 4
Transformada de Laplace
4.1. Transformada de Laplace
4.1.1. Definicion
La Transformada de Laplace es un operador lineal que transforma unafuncion f(t) de argumento real t (t ≥ 0) en una funcion F (s) de argumentocomplejo s definida como:
F (s) =
∫ ∞
0f(t) e−stdt (4.1)
donde s es una variable compleja de la forma s = σ + ω con σ > 0.1
Se lo representa usualmente con el sımbolo L, y se escribe
L[f ](s) = F (s)
La transformada de Laplace opera sobre un conjunto de funciones defi-nidas en el dominio del tiempo y las lleva a otro conjunto de funciones en eldominio de la frecuencia compleja, en el dominio de la pulsacion compleja
o simplemente en el dominio de la variable s. Esta transformacion aplicadasobre el modelo de un sistema permite encontrar la respuesta del sistemade forma mucho mas simple que en el dominio del tiempo, principalmentecuando el modelo del sistema incluye ecuaciones diferenciales, ya que estasse transforman en ecuaciones algebraicas en el dominio de s.
Luego a la respuesta encontrada en el dominio de s se aplica la trans-formacion inversa para obtener la respuesta en el dominio del tiempo. Estaoperacion se conoce como transformada inversa de Laplace o antitransfor-
madad de Laplace y se denota
L−1[F (s)](t) = f(t) (4.2)
1Esta restriccion define lo que se llama region de convergencia de la transformada deLaplace, que asegura la existencia de esta transformada para toda funcion f(t) sin singu-laridades en el semieje positivo, cuyo valor absoluto crece a lo sumo como un polinomioen t cuando t → +∞.
101

102 CAPITULO 4. TRANSFORMADA DE LAPLACE
L−1 es tambien un operador lineal definido como la inversa de (4.1), esteoperador se vera en detalle mas adelante (seccion 4.3).
Para encontrar la transformada de Laplace de una funcion se debe in-tegrar sobre t entre 0 e ∞ la funcion a transformar multiplicada por e−st,segun indica su definicion (4.1). Como la transformacion existe solo parat ≥ 0, para asegurar unicidad (ver mas adelante la definicion de unicidad,seccion 4.1.2) la funcion a transformar debe ser nula para t < 0. Si f(t) noes nula para t < 0 entonces se define g(t) = f(t)u(t) para poder aplicar latransformada.
Ejemplo 4.1 Sea la funcion f(t) = e−at u(t) , vamos a encontrar su funciontransformada F (s).
Aplicando la definicion (4.1) 2
F (s) = L[e−at u(t)](s) =
∫ ∞
0e−at e−st dt
=
∫ ∞
0e−(s+a)t dt
=−e−(s+a)t
(s+ a)
∣∣∣∞
0=−e−(s+a)∞
s+ a+
e−(s+a)0
s+ a
L[e−at u(t)](s) =1
s+ a(4.3)
No siempre es necesario calcular esta integral para encontrar nuevastransformadas. Haciendo uso de transformadas ya calculadas y de opera-ciones algebraicas se pueden encontrar nuevas transformadas. Por ejemplo:
Ejemplo 4.2 Encontrar la transformada de la funcion escalon f(t) = u(t)Digamos sin demostrar que para el operador L vale lo siguiente3
lımεL[fε] = L[lım
εfε] (4.4)
Entonces, si tomamos lımite al resultado del ejemplo anterior ec. (4.3)para a que tiende a cero
lıma→0L[e−at u(t)](s) = lım
a→0
1
s+ a
L[lıma→0
e−at u(t)](s) = L[u(t)] = 1
s(4.5)
que es la transformada de la funcion f(t) = u(t) (fig. 4.1).
2Notese que la transformada de Laplace de esta funcion esta bien definida, es decir laintegral converge, para todo s tal que su parte real sea estrıctamente mayor que −a.
3Notar que se esta tomando lımite de una funcion Lebesgue integrable, por lo tantolımε
∫
fdu =∫
lımε fdu.

4.1. TRANSFORMADA DE LAPLACE 103
1
t
u(t)
Figura 4.1: Funcion escalon f(t) = u(t)
4.1.2. Propiedades de la transformada
Algunas propiedades de la Transformada de Laplace son de gran utili-dad para encontrar transformadas de funciones compuestas o que de algunaforma se relacionan con funciones cuyas transformadas se conocen. Las masusadas de estas propiedades se describen a continuacion.
Unicidad
A una funcion f(t)u(t) le corresponde una unica funcion transformadaF (s) y una funcion F (s) es transformacion de una y solo una funcion f(t)u(t)
f(t)u(t)L−→ F (s) y F (s)
L−1
−→ f(t)u(t)
Otra forma de enunciar esta propiedad es: si f(t)u(t) tiene como transfor-mada a F (s), y g(t)u(t) tiene como transformada a la misma F (s), entoncesf(t)u(t) y g(t)u(t) son iguales.4 Esta propiedad es de gran importancia yaque permite formar los llamados pares de transformadas que se utilizan pa-ra realizar la operacion de antitransformacion, como se vera en detalle masadelante.
Linealidad
La transformada de la suma de funciones es igual a la suma de las trans-formadas de cada una de estas funciones
a1 f1(t) + a2 f2(t)→ a1 F1(s) + a2 F2(s)
donde F1(s) y F2(s) son las transformadas de Laplace de f1(t) y f2(t) res-pectivamente.
4Para que la transformacion sea unica para todo t se debe asegurar que la funcion atransformar sea identicamente nula para t < 0, ya que si f = g ∀t ≥ 0 pero f 6= g ∀t < 0,sus transfromadas seran las mismas y no se cumple la unicidad.

104 CAPITULO 4. TRANSFORMADA DE LAPLACE
Ejemplo 4.3 Encontrar la transformada de Laplace de la funcionAe−at u(t)
El calculo por integracion es
F (s) = L[Ae−atu(t)](s) =
∫ ∞
0Ae−ate−st dt
= A
∫ ∞
0e−(s+a)t dt
L[Ae−atu(t)](s) =A
s+ a(4.6)
ahora si en lugar de resolver la integral se aplica la propiedad de li-nealidad haciendo uso de la ec. (4.3) se tiene
L[Ae−atu(t)
]= AL
[e−atu(t)
]=
A
s+ a
que coincide con (4.6).
Ejemplo 4.4 Podemos hacer uso de la igualdad de Euler para encontrar latransformada del sen(ωt). Sabiendo que
sen(ωt) =1
2
(eωt − e−ωt
)
aplicando la propiedad de linealidad la transformada sera
L[sen(ωt)u(t)](s) = L[1
2
(eωt − e−ωt
)u(t)
]
=1
2
(L[eωtu(t)]− L[e−ωtu(t)]
)
=1
2
(1
s− ω− 1
s+ ω
)=
2ω
2 (s2 + ω2)
L[sen(ωt)u(t)](s) =ω
(s2 + ω2)(4.7)
Desplazamiento en t
Si una funcion f(t)u(t) se desplaza un tiempo t0 de forma que
f(t)u(t)→ f(t− t0)u(t− t0)
entonces su transformada5 sera:
L[f(t− t0)u(t− t0)](s) =
∫ ∞
t0
f(t− t0)e−st dt
5La transformada se define para t ≥ 0 por lo que la integracion se realiza entre 0 e ∞,si t se desplaza a t − t0 entonces la transformada queda definida para t − t0 ≥ 0, o bient ≥ t0 y la integracion debe realizarse entre t0 e ∞

4.1. TRANSFORMADA DE LAPLACE 105
para resolver esta integral hagamos un cambio de variable6 q = t − t0 demodo que dq = dt
=
∫ ∞
0f(q)e−s(q+t0) dq
=
∫ ∞
0f(q)e−sqe−st0 dq
= e−st0
∫ ∞
0f(q)e−sq dq
︸ ︷︷ ︸transf.de f sin desplazar
L[f(t− t0)u(t− t0)](s) = e−st0F (s) (4.8)
La transformada de una funcion f(t)u(t) desplazada en t0 es igual a latransformada F (s) de la funcion sin desplazar, multiplicada por e−st0 . Estapropiedad se conoce como teorema del desplazamiento en el dominio deltiempo.
A
t0 t
u(t− t0)
Figura 4.2: Funcion escalon desplazado f(t) = Au(t− t0)
Ejemplo 4.5 Una funcion escalon de amplitud A se inicia un tiempo t0 > 0(fig. 4.2). Calcular su transformada aplicando la propiedad del des-plazamiento en t .
Como sabemos (4.5), la transformada de un escalon es
L[Au(t)](s) = A
s
entonces, segun la propiedad anterior, la transformada del escalon quese inicia en t = t0 sera:
L[Au(t− t0)](s) = e−st0A
s
6Esto cambia nuevamente el lımite inferior de integracion puesto que ahora q = t− t0y como t− t0 ≥ 0 entonces q ≥ 0

106 CAPITULO 4. TRANSFORMADA DE LAPLACE
Desplazamiento en s
Si una funcion f(t)u(t) es afectada por una exponencial e−at su trans-formada de Laplace sufre un desplazamiento en s.
L[e−atf(t)u(t)](s) =
∫ ∞
0e−atf(t)e−st dt
=
∫ ∞
0f(t)e−(s+a)t dt
haciendo un cambio de variable de forma que s + a = g, la integral tomala forma de la transformada pero en la variable g, o bien, en la variabledesplazada s+ a
=
∫ ∞
0f(t)e−(g)t dt = F (g)
L[e−atf(t)u(t)] = F (s+ a) (4.9)
El desplazamiento en frecuencia de una funcion transformada se produce almultiplicar la funcion por un exponencial en el dominio del tiempo. Estapropiedad se conoce como teorema del desplazamiento en la variable s.
Ejemplo 4.6 Si afectamos al escalon Au(t) por el exponencial e−at, segunla propiedad del desplazamiento en s la transformada de Au(t) severa desplazada en s+ a
F (s) =A
s→ F (s) = F (s+ a) =
A
s+ a
que es coincidente con la transformada L[e−atAu(t)](s) encontradaantes por integracion (4.6).
Derivacion
La transformada de una funcion y la transformada de sus sucesivas deri-vadas mantienen una relacion en el dominio de la variable s que hacen a latransformada de Laplace una herramienta muy potente en la resolucion deecuaciones diferenciales.Estas transformadas permiten incorporar las condi-ciones iniciales del problema en el dominio de s, lo que justifica el uso dela transformada unilaterar de Laplace en sistemas con almacenamiento deenergıa.
Sea la funcion f(t)u(t) y su transformada F (s), y sea g(t) = dfdt u(t),
entonces:
L[g(t)](s) = L[df
dt
]=
∫ ∞
0
df
dte−st dt
resolviendo la integral por partes∫ ∞
0u dv = uv
∣∣∞0−∫ ∞
0v du

4.1. TRANSFORMADA DE LAPLACE 107
con
u = e−st → du = −se−st
dv =df
dtdt → v = f(t)
la integral queda
L[g(t)](s) = f(t)e−st∣∣∞0−∫ ∞
0f(t)
(−se−st
)dt
= f(∞)e−∞s
︸ ︷︷ ︸=cero
−f(0)e−0s + s
∫ ∞
0f(t)e−st dt
︸ ︷︷ ︸transformada de f(t)
= −f(0) + sL [f(t)]
Como la variable s se definio con su parte real mayor que cero el terminof(∞)e−∞s sera siempre cero ya que por hipotesis f(t) crece mas lentamenteque la exponencial.
Finalmente nos queda
L[g(t)](s) = G(s) = sL [f(t)u(t)]− f(0)
la transformada de la derivada de una funcion es el producto de s por latransformada de la funcion, menos el valor inicial o condicion inicial de estafuncion f(t). Este valor inicial es el valor que toma la funcion original f(t)en t = 0.
L[df
dt
](s) = sF (s)− f(0) (4.10)
Ejemplo 4.7 Sabiendo que
F (s) = L [sen(ωt)u(t)] (s) = ω
(s2 + ω2)
encontrar la transformada del cos(ωt) aplicando la propiedad de de-rivacion.
Derivando respecto al tiempo t
d (sen(ωt))
dt= ω cos(ωt)
la transformada sera
L[d (sen(ωt))
dt
](s) = L[ω cos(ωt)] = sF (s)− f(0)
= sω
(s2 + ω2)− sen(ω0)
L [ω cos(ωt)] =sω
(s2 + ω2)

108 CAPITULO 4. TRANSFORMADA DE LAPLACE
es decir que
L [cos(ωt)] (s) = s
(s2 + ω2)(4.11)
Observese en este caso que la condicion inicial del sen(ωt) es 0, peroesto no es siempre ası y se debe tener cuidado de no pasar por alto elvalor inicial de la funcion al calcular su derivada en el dominio de s.
Ejemplo 4.8 La funcion f(t) = e−at tiene como derivada en el tiempo ala funcion f ′(t) = −ae−at cuya F ′(s) es, aplicando la propiedad delinealidad de la transformada de Laplace,
− aF (s) =−as+ a
(4.12)
Resolviendo ahora a partir de la transformada de la derivada tenemos
L[f ′(t)
](s) = sF (s)− f(0)
como f(0) = e−a0 = 1,
L[f ′(t)
](s) = s
1
s+ a− 1
=s− (s+ a)
s+ a
L[f ′(t)
](s) =
−as+ a
que concuerda con la ec. (4.12).
Esta propiedad de la transformada de Laplace permite convertir unaecuacion diferencial (a0f(t) + a1f
′(t) + · · ·+ anfn(t) = g(t)) en una simple
ecuacion algebraica en s, lo que facilita enormemente su resolucion en eldominio de la frecuencia compleja.
Integracion
pendiente
4.2. Aplicacion a la resolucion de circuitos
Un circuito electrico con elementos que almacenan energıa tiene comorespuesta una ecuacion diferencial. El orden de esta Ec. Dif. depende decuantos elementos inductivos o capacitivos irreductibles tenga el circuito.Por medio de la transformada de Laplace vamos a obtener una ecuacionalgebraica en s que representa la Ec. Dif. en el dominio de la frecuencia.
La resolucion del circuito consiste por ahora en encontrar la funcion res-puesta en el domino de la frecuencia (mas adelante veremos como encontrar

4.2. APLICACION A LA RESOLUCION DE CIRCUITOS 109
vL
vR
vin(t) i(t)
Figura 4.3: Circuito serie RL
la funcion respuesta en el dominio del tiempo a partir de su funcion trans-formada).
Supongamos un circuito RL como el de la fig. 4.3 excitado con una fuentevin(t) que tiene una corriente inicial i(0)=I0. Se desea encontrar la funcionrespuesta I(s) = L [i(t)].
Aplicando la LKV y segun los signos de las tensiones tenemos
vin(t)− vR(t)− vL(t) = 0
de donde la Ec. Dif. en terminos de la respuesta sera
vin(t) = R i(t) + Ldi(t)
dt(4.13)
Para resolver transformemos esta ecuacion aplicando L a ambos miembros
L [vin(t)] = L[R i(t) + L
di(t)
dt
]
por la propiedad de linealidad
L [vin(t)] = RL [ i(t)] + LL[di(t)
dt
]
resolviendo por separado cada una de estas transformadas se obtiene
L [vin(t)] = Vin(s) (4.14)
L [R i(t)] = RI(s) (4.15)
L[Ldi(t)
dt
]= L (sI(s)− i(0)) (4.16)
entonces, la Ec. Dif. se transforma en la siguiente ecuacion algebraica en lavariable s
Vin(s) = RI(s) + sL I(s)− L i(0) (4.17)
reordenando terminos y reemplazando el valor inicial de la corriente en elinductor (i(0) = I0), despejamos I(s)
RI(s) + sLI(s) = Vin(s) + LI0
I(s) =Vin(s) + LI0
R+ sL(4.18)

110 CAPITULO 4. TRANSFORMADA DE LAPLACE
que es la solucion buscada.
Si bien lo que tenemos hasta ahora es la transformada de la respuestai(t), sabemos por la propiedad de unicidad que esta transformada es unicay por lo tanto a partir de ella podremos encontrar una y solo una funcioni(t) que cumpla con
L[i(t)](s) = I(s) (4.19)
o bien, puesto en terminos de antitransformada
i(t) = L−1[I(s)] (4.20)
Ejemplo 4.9 En t = 0 se aplica al circuito RL serie de la fig. 4.4 unatension continua de 55V. Encontrar la transformada de la respuestai(t) ∀ t > 0.
300mH
470Ω
55u(t) i(t)
Figura 4.4: Circuito serie RL que se enciende en t = 0
Segun la LKV, la malla debe cumplir7
55u(t) = 470 i(t) + 300× 10−3 di(t)
dt
Aplicando la transformada a ambos miembros tenemos
L [55u(t)] = 470L[i(t)] + 300× 10−3 L[di(t)
dt
]
55
s= 470I(s) + 300× 10−3 (sI(s)− i(0)) (4.21)
la corriente inicial del circuito es i(0) = 0 en el inductor. DespejandoI(s) queda
I(s)(470 + 300× 10−3s) =55
s
I(s) =55
s
(1
470 + 300× 10−3s
)
I(s) =183, 33
s(s+ 1566, 66)(4.22)
7La funcion u(t) representa la aplicacion de la fuente en el tiempo t = 0.

4.2. APLICACION A LA RESOLUCION DE CIRCUITOS 111
Ejemplo 4.10 Si ahora queremos obtener la tension en el inductor debe-mos derivar la corriente i(t) en el tiempo y multiplicar por L. Peropodrıamos mas facilmente obtener la transformada de la tension en elinductor aplicando la propiedad de la derivacion. En efecto, sabiendoque
vL(t) = Ldi(t)
dt
la transformada sera
VL(s) = sLI(s)− Li(0)
como ya dijimos, el valor inicial de i(t) en este caso es nulo, entoncescon L = 300mH nos queda
VL(s) = sL I(s) = sL183, 33
s(s+ 1566, 66)
VL(s) =55
s+ 1566, 66(4.23)
4.2.1. Funcion de transferencia
En general se define como funcion de transferencia al cociente entre latransformada de la salida y la transformada de la entrada de un sistema contodas las condiciones iniciales iguales a cero.
H(s) =Y (s)
X(s)(4.24)
donde
Y (s) = L[y(t)]
es la transformada de la salida del sistema, y
X(s) = L[x(t)]
es la transformada de la entrada.
En terminos de circuitos electricos se denomina funcion de transferen-cia a la transformada de la respuesta sobre la transformada de la excita-cion, cuando todos los elementos inductivos y capacitivos del circuito estandesenergizados.
Si analizamos por ejemplo el circuito RL serie de la pagina 109, dondedefinimos la tension vin(t) como excitacion y la corriente i(t) como respuesta,la funcion de transferencia es
H(s) =I(s)
Vin(s)=
1
R+ sL(4.25)

112 CAPITULO 4. TRANSFORMADA DE LAPLACE
Podemos cambiar el punto de vista de la entrada y salida de este cir-cuito, pensando al RL como una carga por la que circula una corriente i(t)provocando una caıda de tension en sus bornes vcarga = vin como respues-ta. En este caso la funcion de transferencia sera el cociente entre la Vin(s)(respuesta) y la I(s) (excitacion).
H(s) =Vin(s)
I(s)= R+ sL (4.26)
La funcion de transferencia definida como el cociente de las transforma-das de una tension sobre una corriente como la de la ec. (4.26) se la llamaimpedancia
Z(s) =V (s)
I(s)(4.27)
De esta forma se define la impedancia de cada uno de los elementos R,L y C, considerando la caıda de tension sobre cada uno de ellos.
Para la resistencia, la caıda de tension en el domino de s sera
VR(s) = RI(s)
y su impedancia (funcion de transferencia) R(s)
R(s) =VR(s)
I(s)= R (4.28)
que es la resistencia de s o de Laplace.
Para el inductor8
VL(s) = sLI(s)− Li(0)
entonces, su funcion de transferencia sera
L(s) =VL(s)
I(s)= sL (4.29)
que es la impedancia inductiva de s.
La relacion tension-corriente en un capacitor es
i(t) = CdvCdt
(4.30)
transformando ambos miembros
I(s) = C [sVC(s)− vC(0)]
8Recordar que la funcion de transferencia se define con condiciones iniciales iguales acero.

4.2. APLICACION A LA RESOLUCION DE CIRCUITOS 113
donde vC(0) es la tension inicial del capacitor, como para encontrar lafuncion de transferencia debemos hacer cero las condiciones inicialestendremos
C(s) =VC(s)
I(s)=
1
sC(4.31)
que es la impedancia capacitiva de s o de Laplace.
Como puede observarse en la ec. (4.26), la impedancia total de Laplace enun circuito serie es la suma de las impedancias de Laplace de cada elemento.
4.2.2. Circuito equivalente de Laplace
Si se toman en consideracion las condiciones iniciales y se suponen engeneral distintas de cero, se puede utilizar la representacion de las respuestasde cada elemento para construir lo que se conoce como circuito equivalente de
Laplace. Este circuito equivalente debe permitirnos obtener en forma directala ecuacion de la respuesta en la variable s, sin tener que plantear primerola Ec. Dif. y luego transformar para poder resolver.
Para encontrar un circuito equivalente serie RLC partimos de la suma-toria de las tensiones en el tiempo y luego transformamos
vin(t) = vR(t) + vL(t) + vC(t)
Vin(s) = VR(s) + VL(s) + VC(s)
como ya vimos, la transformada de las tensiones que caen en cada elementoson
VR(s) = RI(s); VL(s) = sLI(s)− Li(0); VC(s) =1
sC[I(s) + CvC(0)]
reemplazando
Vin(s) = RI(s) + [sLI(s)− Li(0)] +
[1
sCI(s) +
vC(0)
s
](4.32)
Analizando los diferentes terminos del segundo miembro de la ec. (4.32)vemos que en algunos aparece la I(s) multiplicada por la impedancia delelemento. Segun la definicion de impedancia vista antes, el producto dela transformada de la corriente por esta funcion de transferencia nos da latransformada de la tension a bornes del elemento. Es decir que R, sL y 1
sCse
comportan como cargas que al ser atravesadas por una corriente producenuna caıda de tension en el dominio de s. Esto es acorde a lo visto antescuando se encontro la funcion de transferencia de cada elemento.
Por otro lado aparecen las condiciones iniciales, tanto del inductor comodel capacitor, que no contienen el factor I(s), y como estamos sumandotransformadas de tensiones estos terminos deben ser tensiones en s. En el

114 CAPITULO 4. TRANSFORMADA DE LAPLACE
LR
Cvin(t) i(t)
(a)
sLR
1sCVin(s) I(s)
Li(0)
vC(0)s
(b)
Figura 4.5: Circuito serie RLC (a), y su equivalente de Laplace(b)
circuito equivalente se los representa con generadores cuyo valor depende dela energıa inicial almacenada en cada elemento.
Finalmente, agrupando generadores en un miembro y terminos con elfactor I(s) en el otro, la ecuacion de circuito queda
Vin(s) + Li(0)− vC(0)
s= RI(s) + sLI(s) +
1
sCI(s)
Vin(s) + Li(0)− vC(0)
s=
(R+ sL+
1
sC
)I(s)
Vin(s) + Li(0)− vC(0)
s= Z(s)I(s)
Nuevamente, Z(s) es la impedancia de s o impedancia de Laplace, formadapor la suma de cada una de las impedancias de s del circuito.
Z(s) =
(R+ sL+
1
sC
)(4.33)
El circuito de la fig. 4.5b permite obtener en forma directa la ec. (4.32) quees lo que se buscaba. Observese como la polaridad de los generadores detension que representan las condiciones iniciales determinan el signo en laecuacion.
De igual forma, hagamos ahora el mismo analisis con un circuito RLCparalelo. Partiendo de la suma de las corrientes en el tiempo igual a lacorriente total y luego transformando tendremos
iin(t) = iR(t) + iL(t) + iC(t)
Iin(s) = IR(s) + IL(s) + IC(s)
reemplazando
IR(s) =Vin(s)
R
IL(s) =1
sL[Vin(s) + Li(0)]
IC(s) = C [sVin(s)− vC(0)]

4.2. APLICACION A LA RESOLUCION DE CIRCUITOS 115
la ecuacion de circuito queda
Iin(s) =Vin(s)
R+
1
sL[Vin(s) + Li(0)] + C [sVin(s)− vC(0)] (4.34)
Iin(s) = Vin(s)
(1
R+
1
sL+ sC
)+
i(0)
s− CvC(0)
Iin(s) = Vin(s)1
R+ Vin(s)
1
sL+
i(0)
s+ Vin(s) sC − CvC(0) (4.35)
Como estamos sumado corrientes, los terminos con el factor Vin(s) son lasadmitancias de Laplace y los demas son fuentes de corrientes que dependende los valores iniciales de energıa almacenada en inductores y capacitores.La ec. (4.35) puede obtenerse en forma directa del circuito de la fig. 4.6b
LR C
vin(t)
iin(t)
(a)
sLR 1sC
Vin(s)
Iin(s)i(0)s
CvC(0)
(b)
Figura 4.6: Circuito paralelo RLC (a), y su equivalente de Laplace (b) utilizandogeneradores de corriente para representar las condiciones iniciales
Agrupando cargas y fuentes tenemos
Iin(s)−i(0)
s+ CvC(0) = Vin(s)
(1
R+
1
sL+ sC
)(4.36)
Iin(s)−i(0)
s+ CvC(0) = Vin(s)
1
Z(s)
es decir que la impedancia total de s en un RLC paralelo es
1
Z(s)=
1
R+
1
sL+ sC
Z(s) =1
1R+ 1
sL+ sC
Si en lugar de representar las condiciones iniciales con generadores decorriente queremos representarlas por fuentes de tension como se hizo enel circuito equivalente serie podemos reescribir la ec. (4.34) de la siguienteforma
Iin(s) =Vin(s)
R+
1
sL[Vin(s) + Li(0)] + sC
[Vin(s)−
vC(0)
s
](4.37)
donde vemos que las condiciones iniciales son ahora tensiones que se sumano restan a la Vin(s) para dar la tension aplicada VL(s) y VC(s) a los elemen-tos sL y 1
sCrespectivamente, en el circuito de la fig. 4.7b se representa la
ec. (4.37).

116 CAPITULO 4. TRANSFORMADA DE LAPLACE
Es decir que en el circuito equivalente paralelo de Laplace cada elementoalmacenador de energıa tendra asociado en serie al mismo, un generador detension igual al de cada elemento del circuito equivalente serie (fig. 4.5).
LR C
vin(t)
iin(t)
(a)
sLR
1sC
Vin(s)
Iin(s)
L i(0) vC(0)s
(b)
Figura 4.7: Circuito paralelo RLC (a), y su equivalente de Laplace (b) utilizandogeneradores de tension para representar las condiciones iniciales
Como regla general podemos decir que la representacion de cada ele-mento en el circuito equivalente de Laplace estara dada por su funcion detransferencia mas un generador de tension asociado al elemento que repre-sente su condicion inicial. Si recorremos la malla en el sentido de circulacionde la corriente, en un inductor este generador debe ser una subida de tensiony en un capacitor una caıda de tension.
4.2.3. Teorema del valor inicial
El teorema del valor inicial permite conocer el valor de inicio de la res-puesta en el dominio del tiempo, estando aun en el dominio de la variable s.Esto es util a la hora de comprobar si la respuesta encontrada cumple conlas condiciones iniciales exigidas por el sistema, sin necesidad de antitrans-formar para la verificacion.
Para encontrar la definicion del teorema partimos de la transformadade la derivada de una funcion f(t). Segun la (4.10) la transformada de laderivada de una funcion f(t) es
L[df(t)
dt
]=
∫ ∞
0
df(t)
dte−st dt = sF (s)− f(0)
si tomamos lımite a ambos miebros para s→∞ el primer miembro
lıms→∞
∫ ∞
0
df(t)
dte−st dt =
∫ ∞
0
df(t)
dtlıms→∞
e−st dt = 0
da cero, es decir que
lıms→∞
(sF (s)− f(0)) = 0
f(0) = lıms→∞
(sF (s))

4.2. APLICACION A LA RESOLUCION DE CIRCUITOS 117
Esta igualdad nos dice que el valor que se obtiene de tomar el lımite paras → ∞ de la transformada de la respuesta, es el valor que toma dicharespuesta9 en t = 0. Esto se conoce como teorema del valor inicial.
4.2.4. Teorema del valor final
Igualmente importante al valor inicial es el valor final que tomara larespuesta en el tiempo, este valor puede conocerse mediante el teorema del
valor final antes de pasar la respuesta al domino del tiempo.Si a la transformada de la derivada de una funcion le tomamos lımite
para s→ 0 tenemos
lıms→0
∫ ∞
0
df(t)
dte−st dt = lım
s→0(sF (s)− f(0))
∫ ∞
0
df(t)
dtlıms→0
e−st
︸ ︷︷ ︸=1
dt = lıms→0
(sF (s)− f(0))
f(t)∣∣∣∞
0= f(∞)− f(0) = lım
s→0(sF (s)− f(0))
f(∞) = lıms→0
(sF (s)) (4.38)
es decir que el valor que toma el lımite para s → 0 de la respuesta en eldomino de Laplace, es el valor que tomara en el dominio del tiempo parat =∞.
La ecuacion (4.38) se conoce como teorema del valor final. Este teoremaes aplicable solo si todos los polos de la funcion F (s) tienen parte realnegativa, menos uno que puede ser cero. La causa de esta restriccion es quesi una funcion en el domino de Laplace tiene polos con parte real positiva (ono negativa) la antitransformada de esta funcion tiene un comportamientooscilante o inestable en el tiempo, es decir que en t =∞ no tomara un valorreal finito. El analisis de estabilidad de los sistemas es materia de estudiode Teorıa de los circuitos II.
Ejemplo 4.11 Encontrar el valor que toma la funcion sen(ωt) para t→∞aplicando el teorema del valor final a su transformada.
La transformada del sen(ωt) es, segun la ec. (4.7)
L[sen(ωt)u(t)] = ω
(s2 + ω2)=
ω
(s+ jω)(s− jω)
pero los dos polos de esta funcion tienen parte real igual a cero
Re +jω = 0
Re −jω = 0
9Siempre que f(t) sea continua en t = 0

118 CAPITULO 4. TRANSFORMADA DE LAPLACE
entonces si le aplicamos el TVF (Teorema del Valor Final) a esta fun-cion obtendremos un resultado erroneo, en efecto
lıms→0
sF (s) = lıms→0
sω
(s2 + ω2)= 0 (4.39)
nos dice que sen(ω∞) = 0, lo cual no es verdadero porque el valor quetoma la funcion senoidal en el infinito esta indefinido (entre 1 y −1).
sen(ωt)∣∣∣t→∞
= indefinido 6= 0
4.3. Antitransformada o transformada inversa deLaplace
La aplicacion de la transformada de Laplace en la resolucion de ecua-ciones diferenciales (o de sistemas cuyas respuestas se expresen medianteecuaciones diferenciales) se completa cuando luego de obtenida la respues-ta en el dominio de la variable s se obtiene la respuesta en el domino deltiempo. Esto es posible gracias a la propiedad de unicidad que tiene es-ta transformacion, la cual nos asegura que existe una unica funcion en eltiempo cuya transformada coincide con nuestra respuesta en el dominio des.
La operacion que lleva F (s) a f(t) se llama antitransformada o trans-
formada inversa de Laplace y se define como10
f(t) = L−1 [F (s)] =1
2jπ
∫ j∞
−j∞F (s) est ds (4.40)
pero como esta integral es en general de difıcil resolucion, la transformadainversa de una funcion F (s) se encuentra siempre buscando una funcionf(t) candidata, cuya transformada sea F (s). Para facilitar la busqueda deesa funcion f(t) se puede descomponer la funcion original F (s) en una sumade funciones mas sencillas y luego aplicar la propiedad de linealidad. Esdecir
f(t) = L−1 [F (s)]
f1(t) + f2(t) + f3(t) = L−1 [F1(s) + F2(s) + F3(s)]
donde F (s) = F1(s)+F2(s)+F3(s) y f(t) = f1(t)+f2(t)+f3(t). Estas funcio-nes sencillas F1(s), F2(s), F3(s) deben ser ademas conocidas transformadasde modo tal que puedan asociarse facilmente a sus funciones correspondien-tes en el tiempo.
10Siempre que F (s) no tenga singularidades con parte real positiva, si las tiene debeelegirse un camino de integracion tal que contenga tambien estas singularidades con partereal positiva, pero no son casos que se encuentren en los sistemas que aquı se tratan

4.3. ANTITRANSFORMADAOTRANSFORMADA INVERSA DE LAPLACE119
4.3.1. Desarrollo en fracciones parciales
Una funcion en el dominio de la variable s que satisface
lıms→∞
F (s) = 0 (4.41)
si se escribe como F (s) = P (s)Q(s) , entonces se puede asegurar que el grado de
P (s) es siempre menor al de Q(s).El metodo de expansion en fracciones simples permite expandir un co-
ciente de polinomios en una suma de fracciones con una constante a deter-minar como numerador y una raız del polinomio Q(s) como denominador.Las fracciones simples propuestas dependen del tipo de raices de Q(s).
Raices simples. Sea Q(s) = (s + α1)(s + α2) · · · (s + αn) entonces F (s)puede escribirse
F (s) =P (s)
Q(s)=
A1
(s+ α1)+
A2
(s+ α2)+ · · ·+ An
(s+ αn)
Para encontrar las constantes se multiplica ambos miembros por laraız denominador y se toma lımite para s que tiende a dicha raız. Porejemplo
lıms→−α1
[(s+ α1)
P (s)
Q(s)
]= lım
s→−α1
[A1 + (s+ α1)
A2
(s+ α2)+ · · ·+ (s+ α1)
An
(s+ αn)
]
lıms→−α1
[(s+ α1)
P (s)
Q(s)
]= A1
En general, cualquier constante i -esima puede ser calculada
Ai = lıms→−αi
[(s+ αi)
P (s)
Q(s)
](4.42)
y la funcion f(t) sera
f(t) =n∑
i=1
Aie−αit (4.43)
Raices multiples. Sea Q(s) = (s+ α)n, entonces F (s) puede escribirse
F (s) =P (s)
Q(s)=
A1
(s+ α)+
A2
(s+ α)2+ · · ·+ An
(s+ α)n
Para encontrar la constante An se multiplica ambos miembros por eldenominador de F (s) y se toma lımite para s→ −α
lıms→−α
[(s+ α)n
P (s)
Q(s)
]= lım
s→−α
[A1(s+ α)n−1 +A2(s+ α)n−2 + · · ·+An−1(s+ α) +An
]
lıms→−α
[(s+ α)n
P (s)
Q(s)
]= An

120 CAPITULO 4. TRANSFORMADA DE LAPLACE
Ahora para hallar An−1 se toma la derivada respecto a s de (s+α)n P (s)Q(s)
y luego nuevamente lımite para s→ −α
lıms→−α
[d
ds
((s+ α)n
P (s)
Q(s)
)]= lım
s→−α
[(n− 1)A1(s+ α)n−2 + (n− 2)A2(s+ α)n−3 + · · ·+
lıms→−α
[d
ds
((s+ α)n
P (s)
Q(s)
)]= An−1
En general, para encontrar la constante An−j se toma el lımite de
la derivada j -esima de (s + α)n P (s)Q(s) para s → −α y se divide por el
factorial de j
An−j = lıms→−α
[1
j!
d(j)
ds
((s+ α)n
P (s)
Q(s)
)]
y la funcion f(t) sera
f(t) =n∑
i=1
Ai ti−1e−αt (4.44)
Raices complejas. Si bien las raices complejas pueden ser calculadas segunsean simples o multiples como se vio en los puntos anteriores, es po-sible simplificar las operaciones de antitransformacion si se observa losiguiente:
Sea Q(s) = s2 + ps + q, con raices complejas conjugadas (s1−2 =−α± jω) entonces la expansion en fracciones simples sera
F (s) =P (s)
Q(s)=
A
(s+ α+ jω)+
A∗
(s+ α− jω)(4.45)
donde A y A∗ son constantes complejas y A∗ es el conjugado de A.Segun (4.43) la f(t) sera entonces una funcion compleja, la que me-diante la igualdad de Euler podra ser expresada como una funcion realen terminos de senos y cosenos. Por ejemplo si se desea obtener unarespuesta real en terminos de un unico coseno se puede antitransfor-mar y poner A en forma polar A = |A|ejθ, con lo que A∗ = |A|e−jθ,entonces la f(t) sera
f(t) = |A|ejθe(−α−jω)t + |A|e−jθe(−α+jω)t = |A|e−αt(ej(ωt−θ) + e−j(ωt−θ)
)
f(t) = 2|A|e−αt cos(ωt− θ) (4.46)
Pero si operamos con (4.45) de forma que nos queden las transformadasde estos senos y cosenos, podemos obtener directamente la f(t) real.

4.3. ANTITRANSFORMADAOTRANSFORMADA INVERSA DE LAPLACE121
En efecto, haciendo comun denominador y luego operando tenemos
F (s) =A(s+ α− jω) +A∗(s+ α+ jω)
(s+ α)2 + ω2
F (s) =(A+A∗)(s+ α) + j(−A+A∗)ω
(s+ α)2 + ω2(4.47)
pero (A + A∗) = 2ReA y j(A∗ − A) = −2 ImA, ambos valoresreales, entonces
F (s) = 2ReA s+ α
(s+ α)2 + ω2+ 2 ImA ω
(s+ α)2 + ω2(4.48)
que corresponden a la transformada de un coseno y un seno multipli-cados por un exponencial e−αt
f(t) = 2 e−αt (ReA cos(ωt) + ImA sen(ωt)) (4.49)
Esto nos permite, para el caso de raices complejas conjugadas, plantearen forma directa la siguiente igualdad
F (s) =P (s)
Q(s)= A
s+ α
(s+ α)2 + ω2+B
ω
(s+ α)2 + ω2(4.50)
y encontrar las constantes A y B dando a s dos valores cualquieradistintos de −α± jω.
4.3.2. Formula de Heaviside
Si la funcion F (s) tiene solamente polos simples, existe una formulaconocida como formula del desarrollo de Heaviside que permite obtener laantitransformada f(t) en forma directa.
Sea F (s) = P (s)Q(s) y −αi las n raices distintas de Q(s), entonces la f(t)
se obtiene haciendo
f(t) = L−1
[P (s)
Q(s)
]=
n∑
i=1
P (−αi)
Q′(−αi)e−αit (4.51)
donde Q′ es la derivada de Q respecto de s.Para probar esta igualdad definamos la funcion Qi(s) como
Qi(s) =Q(s)
s+ αi(4.52)
es decir que Q(s) se puede expresar como Q(s) = Qi(s)(s+αi) y ademas la(4.42) se puede escribir utilizando esta nueva funcion como
Ai = lıms→−αi
[P (s)
Qi(s)
]=
P (−αi)
Qi(−αi)(4.53)

122 CAPITULO 4. TRANSFORMADA DE LAPLACE
Si tomamos la derivada de Q(s) respecto de s
Q′(s) =d
ds[Qi(s)(s+ αi)] = Qi(s) + (s+ αi)Q
′i(s) (4.54)
y hacemos s = −αi obtenemos que
Q′(−αi) = Qi(−αi) (4.55)
con lo que la (4.53) nos queda
Ai =P (−αi)
Q′(−αi)(4.56)
y llevando esta a (4.43) obtenemos la (4.51).
4.4. Respuesta al impulso
La funcion delta de Dirac, o funcion delta, o funcion impulso es unafuncion definida como11
δ(t) =
∞ para t = 00 ∀ otro t
∫ ∞
−∞δ(t) dt = 1
Si un circuito es excitado por una funcion como esta, se obtendra unarespuesta muy particular que analizaremos a continuacion.
1t0
0 t0
− 1t0
Au(t)
−Au(t− t0)
t⇒
1t0
0 t0 t
f(t)
Figura 4.8: Funcion pulso
Empecemos por encontrar la transformada de Laplace de la funcion im-pulso. Para esto definamos previamente una funcion pulso como la sumade dos escalones (Au(t) y −Au(t − t0)) desplazados uno de otro, de igual
11Si bien esta funcion no es realizable fısicamente, ya que su amplitud debe ser infinitay su duracion en el tiempo debe ser cero, es de gran utilidad en el analisis de circuitos,como se vera mas adelante.

4.4. RESPUESTA AL IMPULSO 123
amplitud pero de signo opuesto, de forma tal que se anulen entre sı parat > t0 (fig. 4.8). Con A = 1
t0, la funcion pulso sera
f(t) = Au(t)−Au(t− t0) =1
t0u(t)− 1
t0u(t− t0)
tal que, cualquiera sea el valor de t0, el area de esta funcion es igual a 1
Ahora, si a esta funcion pulso le tomamos lımite para t0 → 0 obtenemosla funcion impulso, es decir
lımt0→0
(1
t0u(t)− 1
t0u(t− t0)
)= δ(t)
transformando ambos miembros de esta igualdad
L[lımt0→0
(1
t0u(t)− 1
t0u(t− t0)
)]= L [δ(t)]
podemos sacar el lımite afuera de la transformada, por la propiedad delinealidad
L [δ(t)] = lımt0→0
1
t0L [u(t)]− L [u(t− t0)]
L [δ(t)] = lımt0→0
1
t0
[1
s− e−st0
s
]
L [δ(t)] = lımt0→0
1− e−st0
s t0(4.57)
para resolver este lımite se puede aplicar la regla de L’hospital, esto es derivarnumerador y denominador respecto de la variable que se esta tomando lımite
L [δ(t)] = lımt0→0
∂(1−e−st0)∂t0
∂(s t0)∂t0
L [δ(t)] = lımt0→0
s e−st0
s=
s
s
L [δ(t)] = 1 (4.58)
es decir, la transformada del delta de Dirac es la unidad en el dominio de lavariable s.
Recordando que se definio la funcion de transferencia como el cociente dela transformada de la salida sobre la transformada de la entrada con todaslas condiciones iniciales iguales a cero
H(s) =Vout(s)
Vin(s)(4.59)

124 CAPITULO 4. TRANSFORMADA DE LAPLACE
si aplicamos a la entrada un delta de Dirac tendremos
vin(t) = δ(t)⇒ Vin(s) = 1
entonces
H(s) =Vout(s)
L [δ(t)] =Vout(s)
1
H(s) = Vout(s)
es decir que si a un sistema lo excitamos con un delta de Dirac, la transfor-mada de la respuesta sera su funcion de transferencia.
A esta particular respuesta del sistema ante una excitacion delta de Diracse la conoce como respuesta al impulso
respuesta al impulso h(t) = L−1 [H(s)] (4.60)
Si se conoce la respuesta al impulso h(t) de un sistema se conoce entoncessu funcion de transferencia, y por ende se puede calcular la transformada dela salida Vout(s) para cualquier Vin(s)
Vout(s) = Vin(s)H(s)
esto, sin embargo, no es tan sencillo como parece, debido a la imposibilidadfısica de obtener un delta de Dirac. En algunas aplicaciones se utiliza unaaproximacion al delta de Dirac, lograndose en la practica resultados muyaproximados a los teoricos.
4.5. Teorema de convolucion
En el campo de la ingenierıa de control, un sistema se representa normal-mente como un bloque con su funcion de transferencia, tal como se muestraen la (fig. 4.9), donde para obtener la salida Vout(s) se debe multiplicar laentrada Vin(s) por la funcion de transferencia del bloque H(s).
Vout(s) = H(s)Vin(s)
H(s)Vin(s) Vout(s)
Figura 4.9: Bloque de sistema con funcion de transferencia H(s)
En el dominio del tiempo la salida sera la antitransformada de este pro-ducto
vout(t) = L−1 [Vout(s)] = L−1 [H(s)Vin(s)] (4.61)

4.5. TEOREMA DE CONVOLUCION 125
Es decir, la transformada inversa del producto de la entrada por la fun-cion de transferencia nos da directamente la salida en el dominio del tiempo.
Como sabemos
vin(t) = L−1 [Vin(s)]
h(t) = L−1 [H(s)]
Veamos si operando a partir de estas igualdades podemos obtener una rela-cion directa entre la salida, entrada y respuesta al impulso, todo en el do-minio del tiempo. De esta forma, conociendo h(t) se podra conocer vout(t)para cualquier vin(t) sin necesidad de transformar al dominio de s.
Partiendo de la integral de transformacion12 de H(s)
H(s) =
∫ ∞
0h(τ) e−sτ dτ (4.62)
multipliquemos ambos miembros por Vin(s), y como la integral es a lo largode τ , se puede introducir esta funcion dentro del integrando sin modificar laoperacion
Vin(s)H(s) =
∫ ∞
0h(τ) e−sτ Vin(s) dτ (4.63)
el producto e−sτ Vin(s) del integrando es la transformada de la funcion des-plazada vin(t− τ) (4.8).
L [vin(t− τ)] = e−sτ Vin =
∫ ∞
τ
vin(t− τ) e−st dt
Si introducimos esta nueva integral a lo largo de t dentro de (4.63) nos queda
Vin(s)H(s) =
∫ ∞
0h(τ)
[∫ ∞
τ
vin(t− τ) e−st dt
]dτ =
∫ ∞
0
∫ ∞
τ
h(τ) vin(t−τ) e−st dt dτ
Se puede invertir el orden de integracion de esta integral doble, teniendocuidado de adecuar los lımites de integracion para integrar sobre el mismodominio. Integrar a lo largo de t entre τ e ∞ y luego a lo largo de τ entre 0e ∞, es equivalente a integrar a lo largo de τ entre 0 y t y luego a lo largode t entre 0 e ∞.
Vin(s)H(s) =
∫ ∞
0
∫ t
0h(τ) vin(t−τ) e−st dτ dt =
∫ ∞
0e−st
[∫ t
0h(τ) vin(t− τ) dτ
]dt
finalmente, vemos que la integral dentro de los corchetes es una funciondependiente solo de t (ya que la variable τ desaparece al ser valuada en 0 y tdespues de integrar). Entonces esta ecuacion es la transformada de Laplacede la funcion de t entre corchetes
Vin(s)H(s) = L[∫ t
0h(τ) vin(t− τ) dτ
](4.64)
12Se usa la variable τ para mas adelante poder usar t en otra integral

126 CAPITULO 4. TRANSFORMADA DE LAPLACE
de donde, por propiedad de unicidad, se tiene que la integral entre corcheteses igual a la antitransformada del producto Vin(s)H(s)
L−1 [Vin(s)H(s)] =
∫ t
0h(τ) vin(t− τ) dτ (4.65)
y como vimos en (4.59) el producto de la entrada en s por la funcion detransferencia nos da la salida en s
L−1 [Vout(s)] = L−1 [Vin(s)H(s)] = vout(t) (4.66)
reemplazando en (4.65) nos queda
vout(t) =
∫ t
0h(τ) vin(t− τ) dτ (4.67)
esta integral es la operacion que relaciona salida y entrada en el tiempo, yse llama integral de convolucion. Para representarla se utiliza el sımbolo ∗
vout(t) = h(t) ∗ vin(t) (4.68)
Es decir, se puede obtener la respuesta en el tiempo de un sistema pa-ra una determinada excitacion calculando la integral de convolucion de surespuesta al impulso h(t) con la excitacion deseada.
Matematicamente, convolucionar dos funciones en el tiempo equivale amultiplicar sus transformadas en el dominio de Laplace. Y, viceversa, mul-tiplicar dos funciones en el tiempo es equivalente a convolucionar sus trans-formadas en el dominio de Laplace.
La convolucion es conmutativa (4.69), asociativa (4.70) y distributiva
(4.71) , propiedades que se deducen con facilidad de su definicion.
f(t) ∗ g(t) = g(t) ∗ f(t) (4.69)
f(t) ∗ (g(t) ∗ h(t)) = (f(t) ∗ g(t)) ∗ h(t) (4.70)
f(t) ∗ (g(t) + h(t)) = (f(t) ∗ g(t)) + (f(t) ∗ h(t)) (4.71)
Ejemplo 4.12 Encontrar la salida de un sistema con respuesta al impulso
h(t) = 22 e−2000tu(t)
para las entradas vin1(t) = 12u(t)V y vin2(t) = 12 e−2000t u(t)V
Para encontrar las salidas correspondientes a cada entrada debemosconvolucionar cada una de ellas con la respuesta al impulso del sistema.
Con vin1(t) = 12u(t)V sera
vout1(t) =
∫ t
0h(t− τ) vin1(t) dτ =
∫ t
022 e−2000(t−τ) u(t− τ) 12u(τ) dτ
vout1(t) = 264 e−2000t
∫ t
0e2000τ u(t− τ)u(τ) dτ

4.5. TEOREMA DE CONVOLUCION 127
ambos escalones, u(t−τ) y u(τ), valen 1 entre los lımites de integracion0 y t, entonces nos queda
vout1(t) = 264 e−2000t
∫ t
0e2000τ dτ = 264 e−2000t e
2000τ
2000
∣∣∣t
0
vout1(t) =264
2000− 264
2000e−2000t
Con vin2(t) = 12 e−2000t u(t)V la integral sera
vout2(t) =
∫ t
022 e−2000(t−τ) u(t− τ) 12 e−2000τ u(τ) dτ
vout2(t) = 264 e−2000t
∫ t
0dτ = 264 e−2000t τ
∣∣∣t
0
vout2(t) = 264 t e−2000t
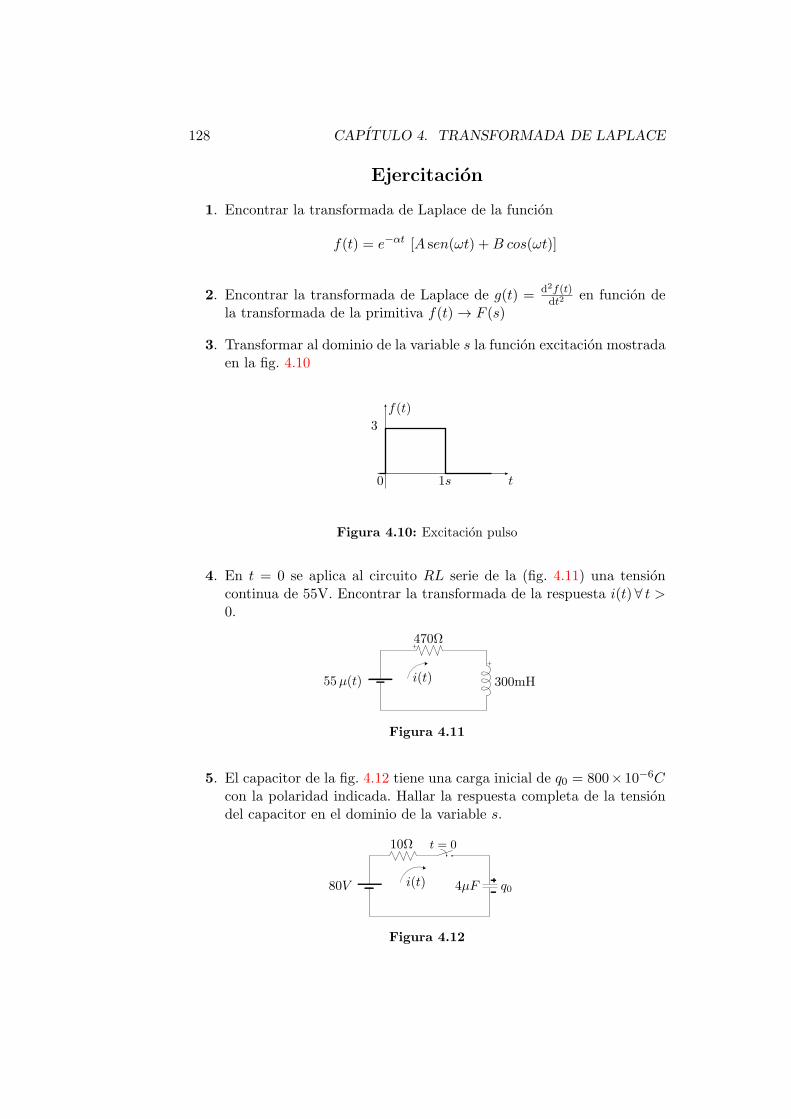
128 CAPITULO 4. TRANSFORMADA DE LAPLACE
Ejercitacion
1. Encontrar la transformada de Laplace de la funcion
f(t) = e−αt [A sen(ωt) +B cos(ωt)]
2. Encontrar la transformada de Laplace de g(t) = d2f(t)dt2
en funcion dela transformada de la primitiva f(t)→ F (s)
3. Transformar al dominio de la variable s la funcion excitacion mostradaen la fig. 4.10
1s0 t
3
f(t)
Figura 4.10: Excitacion pulso
4. En t = 0 se aplica al circuito RL serie de la (fig. 4.11) una tensioncontinua de 55V. Encontrar la transformada de la respuesta i(t) ∀ t >0.
300mH
470Ω
55µ(t) i(t)
Figura 4.11
5. El capacitor de la fig. 4.12 tiene una carga inicial de q0 = 800×10−6Ccon la polaridad indicada. Hallar la respuesta completa de la tensiondel capacitor en el dominio de la variable s.
q080V i(t)
t = 010Ω
4µF
Figura 4.12

4.5. TEOREMA DE CONVOLUCION 129
RL RC
L C
i(t)
V µ(t)
t′
Figura 4.13: Circuito paralelo de dos ramas
6. Encontrar la corriente total i(t) para t > 0 del circuito de la figura4.13. Las condiciones iniciales son iL(0) = I0 y vC(t
′) = V0
7. Un circuito electrico tiene como respuesta la corriente
I(s) =45(
15 s+ 1
)2+ 4
se pide:
a. encontrar i(t)
b. encontrar el valor de i(0) aplicando el teorema del valor inicial ycomprobar en el tiempo
c. encontrar el valor de i(∞) aplicando el teorema del valor final ycomprobar en el tiempo
8. En el esquema de la fig. 4.14 encontrar la respuesta vC(t) para t > 0utilizando la transformada de Laplace como herramienta. La tensioninicial sobre el capacitor es cero.
iin
t = 0
vR(t)vC(t)
Datos
iin = 10 sen(2π50 t)A
C = 10000µF
R = 20Ω
Figura 4.14
9. Para el circuito de la fig. 4.15 se pide encontrar la corriente i1(t). Paramayor facilidad de calculo se aconseja utilizar las variables de estadofısicas del circuito para el planteo.
10. En el circuito de la fig. 4.16 se conecta el interruptor a la posicion 1en t = 0. Luego se cambia el interruptor de la posicion 1 a la posicion2 en t = 85ms. Calcular por el metodo de la transformada de Laplacela tension del capacitor, con vC(0) = 20V . Expresar el resultado en eltiempo utilizando funciones reales de t, validas para todo t > 0.
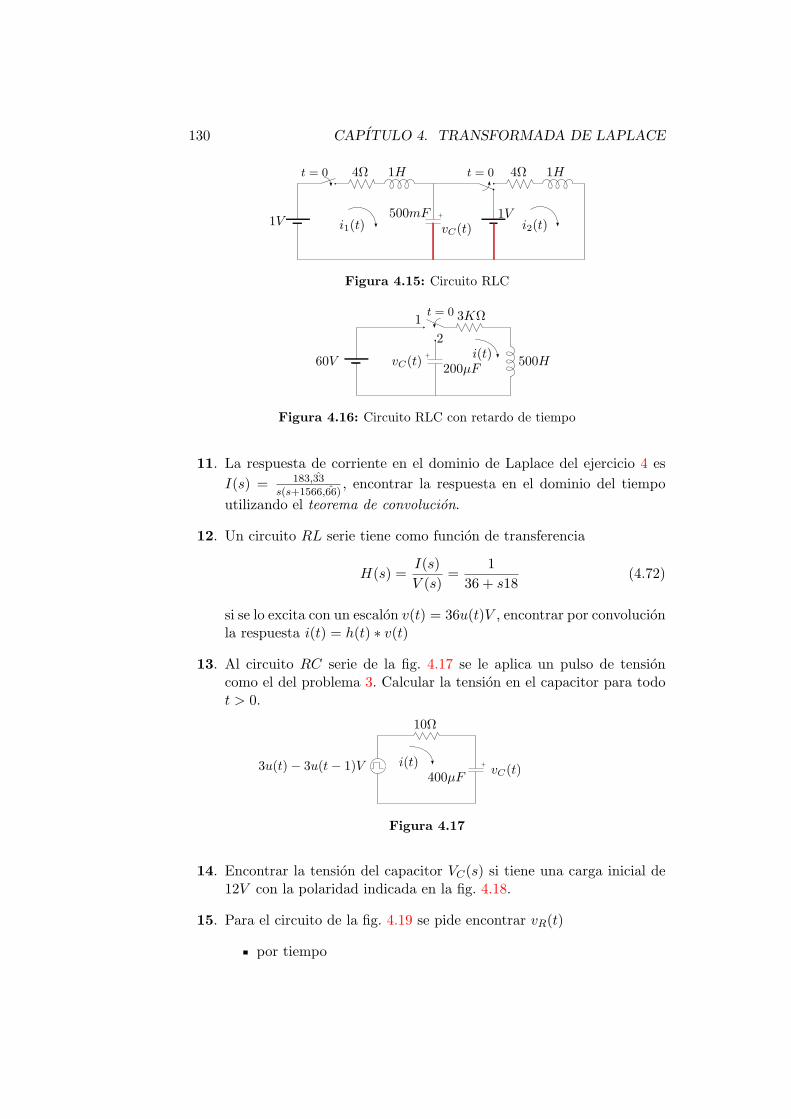
130 CAPITULO 4. TRANSFORMADA DE LAPLACE
1H 1H4Ω4Ω
500mF
t = 0t = 0
1V1V i1(t) i2(t)vC(t)
Figura 4.15: Circuito RLC
500H
3KΩ
200µF
t = 0
60V
1
2
vC(t)i(t)
Figura 4.16: Circuito RLC con retardo de tiempo
11. La respuesta de corriente en el dominio de Laplace del ejercicio 4 es
I(s) = 183,33
s(s+1566,66), encontrar la respuesta en el dominio del tiempo
utilizando el teorema de convolucion.
12. Un circuito RL serie tiene como funcion de transferencia
H(s) =I(s)
V (s)=
1
36 + s18(4.72)
si se lo excita con un escalon v(t) = 36u(t)V , encontrar por convolucionla respuesta i(t) = h(t) ∗ v(t)
13. Al circuito RC serie de la fig. 4.17 se le aplica un pulso de tensioncomo el del problema 3. Calcular la tension en el capacitor para todot > 0.
vC(t)3u(t)− 3u(t− 1)V i(t)
10Ω
400µF
Figura 4.17
14. Encontrar la tension del capacitor VC(s) si tiene una carga inicial de12V con la polaridad indicada en la fig. 4.18.
15. Para el circuito de la fig. 4.19 se pide encontrar vR(t)
por tiempo

4.5. TEOREMA DE CONVOLUCION 131
22Ω
8Ω
5F22u(t)V vC(t)
Figura 4.18: Encontrar VC(s)
por Laplace
por convolucion
R
LAu(t)vR(t)
Figura 4.19: Encontrar vR(t)
16. Aplicando transformada de Laplace, encontrar iL(t) y vC(t) segun seindica en el circuito de la fig. 4.20.
1H4Ω
13F10u(t− 5)V iL(t) vC(t)
Figura 4.20: Circuito RLC desplazado
17. Un sistema es excitado con una senal de entrada vin(t) = e−2t. Se en-cuentra que la corriente de salida vale iout(t) =
43
(e−2t − e−5t
). Hallar
la respuesta al impulso h(t) del sistema.
18. Para el circuito de la fig. 4.21 se pide
a. Obtener el circuito equivalente de Laplace
b. Hallar la corriente I(s) y la tension V (s) a partir del circuitoequivalente
c. Considerando la fuente de corriente como entrada y la corrientei(t) como salida, calcular la respuesta al impulso h(t)
d. Calcular el valor inicial y final de i(t) utilizando los teoremas TVIy TVF
e. Encontrar i(t) y verificar que los valores inicial y final son loscalculados en el punto anterior

132 CAPITULO 4. TRANSFORMADA DE LAPLACE
240Ω240Ω
80H80H
8Ai(t)
v(t)
t = 0
Figura 4.21: Calculo de la corriente de salida aplicando Laplace
19. Encontrar la respuesta completa de tension en el capacitor y corrienteen el inductor para t > 0 del circuito de la figura 4.22. Indicar el tipode amortiguamiento del sistema y graficar las respuestas obtenidas.Verificar por teorema de valor inicial y final que se cumplen con lascondiciones iniciales y finales impuestas por el circuito.
2Ω
1H
0,1F
i(t)
10V
t = 0
Figura 4.22: Calculo de la respuesta natural de tension y corriente
20. Para el circuito de la fig. 4.23 se pide calcular:
a. la funcion de transferencia H(s) definida como
H(s) =VC(s)
I(s)
con I(s) = L[i(t)] y VC(s) = L[vC(t)]b. la transformada inversa h(t) = L−1[H(s)].
16Ω
2H
130F
i(t) = 10e−2tu(t)vC(t)
Figura 4.23: Funcion de transferencia H(s) y respuesta al impulso h(t)

4.5. TEOREMA DE CONVOLUCION 133
21. Encontrar I(s) = L[iL(t)] para 0 < t < 210ms y para t > 210ms en elcircuito de la figura 4.24
t = 210ms10Ω
15Ω4H
iL(t)
100V
Figura 4.24: Circuito RL
22. Dado el circuito de la figura 4.25 en el dominio de s
V (s) = 3 s2+s+1s2+1
6
3sI(s)
Figura 4.25: Dominio de s
Encontrar I(s) y su correspondiente i(t) = L−1[I(s)]
Tiene el circuito condicion inicial no nula? Verificar utilizando elTVI.
Encontrar VL(s).
Si la corriente que atraviesa un capacitor de C = 2,5mF en el dominiode s es
IC(s) =5
s+ 200
se pide
23. a. encontrar VC(s) si vC(0) = 10V
b. decir cual es el τ del circuito
c. calcular y graficar iC(t) y vC(t)
24. Para el circuito de la fig. 4.26 plantear el sistema de ecuaciones enterminos de I(s) y VC(s) en el dominio de Laplace.
25. Obtener la respuesta al impulso del circuito de la figura 4.27 conside-rando H(s) = IR(s)
V (s) ; donde IR(s) = L[iR(t)] y V (s) = L[v(t)]

134 CAPITULO 4. TRANSFORMADA DE LAPLACE
IL(s)V0
VC(s)
t = 0
RL RC
L C
Figura 4.26: Sistema de segundo orden
v(t)
iR(t)
400mH
1000µF 10Ω
Figura 4.27: Calculo de respuesta al impulso
26. Dado L[f(t)] = s−2 − 2s−2e−st1 + s−2e−st2 , expresar f(t) utilizandosenales aperiodicas fundamentales y graficar. Considerar para el graficot2 = 2t1
27. Aplicando transformada de Laplace, encontrar la tension vo(t) indica-da en el circuito de la figura 4.28.
311 cos(100t) vo(t)
t = 06Ω
1000µF 20Ω
Figura 4.28: Tension de salida
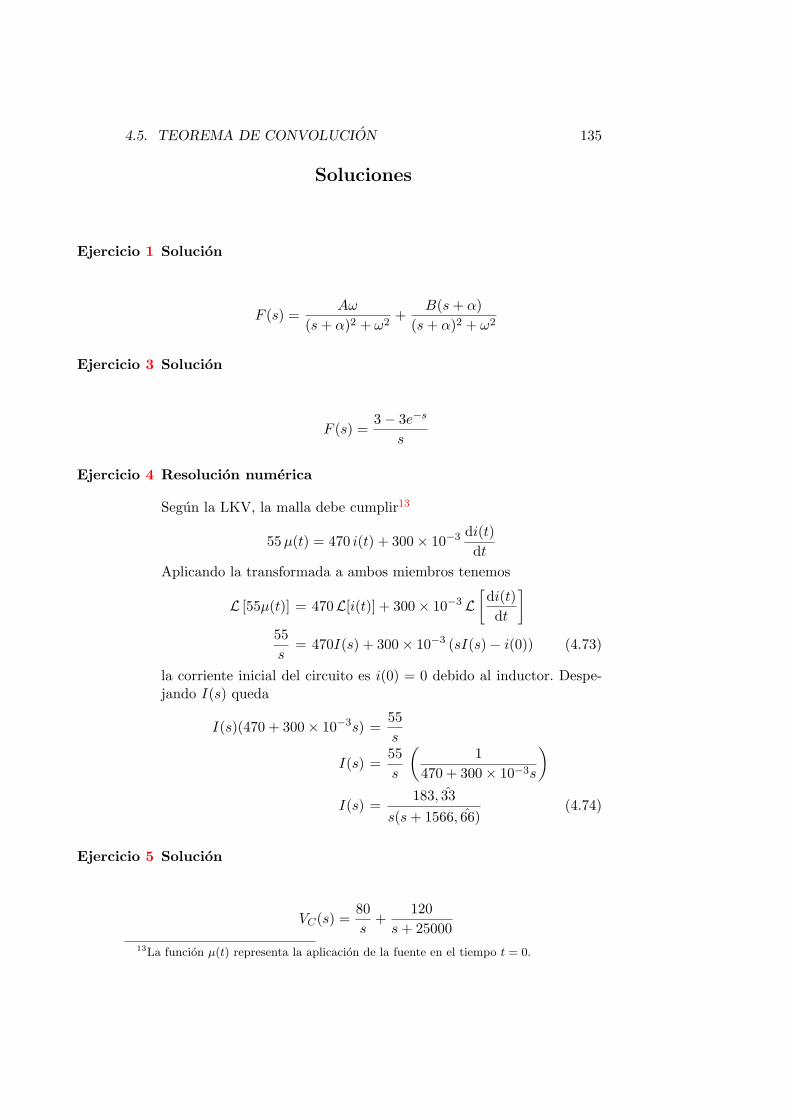
4.5. TEOREMA DE CONVOLUCION 135
Soluciones
Ejercicio 1 Solucion
F (s) =Aω
(s+ α)2 + ω2+
B(s+ α)
(s+ α)2 + ω2
Ejercicio 3 Solucion
F (s) =3− 3e−s
s
Ejercicio 4 Resolucion numerica
Segun la LKV, la malla debe cumplir13
55µ(t) = 470 i(t) + 300× 10−3 di(t)
dt
Aplicando la transformada a ambos miembros tenemos
L [55µ(t)] = 470L[i(t)] + 300× 10−3 L[di(t)
dt
]
55
s= 470I(s) + 300× 10−3 (sI(s)− i(0)) (4.73)
la corriente inicial del circuito es i(0) = 0 debido al inductor. Despe-jando I(s) queda
I(s)(470 + 300× 10−3s) =55
s
I(s) =55
s
(1
470 + 300× 10−3s
)
I(s) =183, 33
s(s+ 1566, 66)(4.74)
Ejercicio 5 Solucion
VC(s) =80
s+
120
s+ 2500013La funcion µ(t) representa la aplicacion de la fuente en el tiempo t = 0.
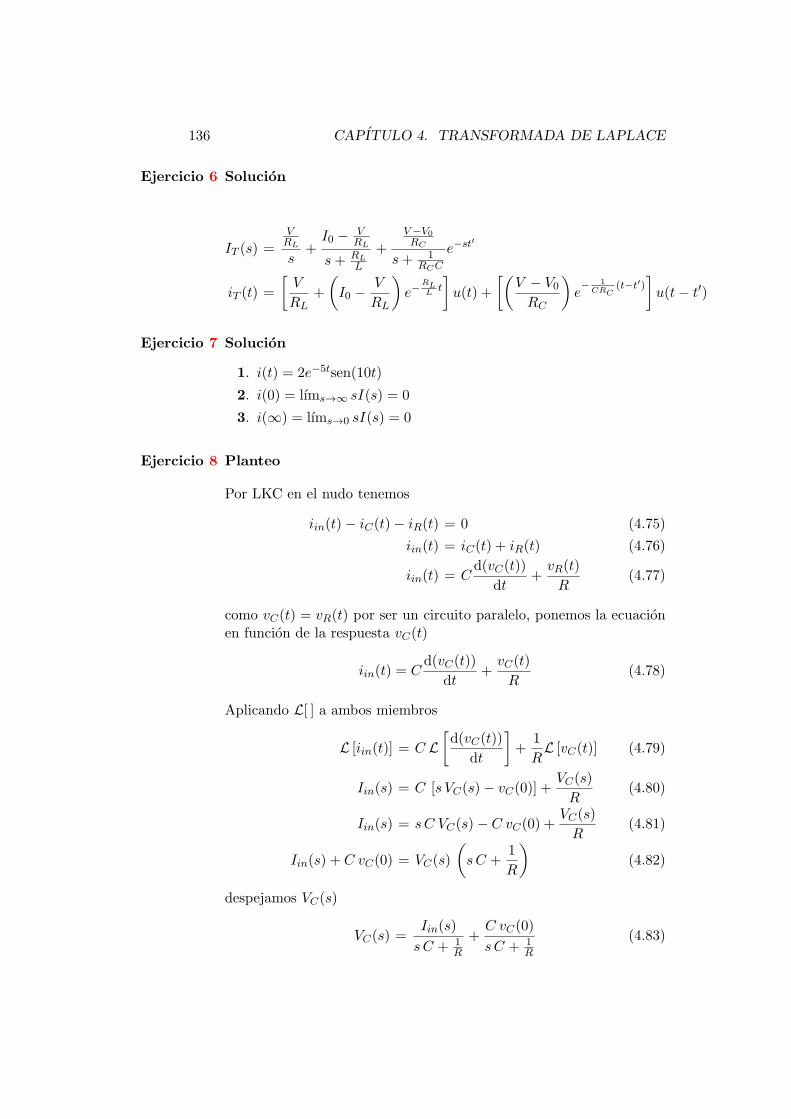
136 CAPITULO 4. TRANSFORMADA DE LAPLACE
Ejercicio 6 Solucion
IT (s) =
VRL
s+
I0 − VRL
s+ RL
L
+
V−V0
RC
s+ 1RCC
e−st′
iT (t) =
[V
RL
+
(I0 −
V
RL
)e−
RLL
t
]u(t) +
[(V − V0
RC
)e− 1
CRC(t−t′)
]u(t− t′)
Ejercicio 7 Solucion
1. i(t) = 2e−5tsen(10t)
2. i(0) = lıms→∞ sI(s) = 0
3. i(∞) = lıms→0 sI(s) = 0
Ejercicio 8 Planteo
Por LKC en el nudo tenemos
iin(t)− iC(t)− iR(t) = 0 (4.75)
iin(t) = iC(t) + iR(t) (4.76)
iin(t) = Cd(vC(t))
dt+
vR(t)
R(4.77)
como vC(t) = vR(t) por ser un circuito paralelo, ponemos la ecuacionen funcion de la respuesta vC(t)
iin(t) = Cd(vC(t))
dt+
vC(t)
R(4.78)
Aplicando L[ ] a ambos miembros
L [iin(t)] = C L[d(vC(t))
dt
]+
1
RL [vC(t)] (4.79)
Iin(s) = C [s VC(s)− vC(0)] +VC(s)
R(4.80)
Iin(s) = sC VC(s)− C vC(0) +VC(s)
R(4.81)
Iin(s) + C vC(0) = VC(s)
(sC +
1
R
)(4.82)
despejamos VC(s)
VC(s) =Iin(s)
sC + 1R
+C vC(0)
sC + 1R
(4.83)

4.5. TEOREMA DE CONVOLUCION 137
Resolucion numerica
Para resolver la (ec. 4.83) calculamos
Iin(s) = L [10 sen(2π50 t)] = 10100π
s2 + (100π)2
y reemplazando tenemos
VC(s) = 10
(100π
s2 + (100π)2
)(1
s 0, 01 + 120
)(4.84)
VC(s) = 1000
(100π
s2 + (100π)2
)(1
s+ 5
)(4.85)
=A
s+ j100π+
A∗
s− j100π+
B
s+ 5(4.86)
Para calcular A hacemos primero
A = lıms→−j100π
1000100π
(s− j 100π)(s+ 5)(4.87)
A =500
−j (−j 100π + 5)=
−500100π + j5
(4.88)
A = −1, 5911 + j0, 025 (4.89)
A = 1, 5913 ej179
(4.90)
luego para calcular B
B = lıms→−5
1000100π
s2 + (100π)2(4.91)
B = 3, 1823 (4.92)
reemplazando en (ec. 4.86)
VC(s) =1, 5913 ej179
s+ j100π+
1, 5913 e−j179
s− j100π+
3, 1823
s+ 5(4.93)
cada termino de la ecuacion anterior tiene antitransformada conocida,quedando la vC(t) igual a
vC(t) = 1, 5913 ej179e−j 100π t + 1, 5913 e−j179 ej 100π t + 3, 1823 e−5 t
(4.94)utilizando la igualdad de Euler
cos(ωt) =ejωt + e−jωt
2(4.95)

138 CAPITULO 4. TRANSFORMADA DE LAPLACE
nos queda
vC(t) = 3, 1826
[ej(100π t−179) + e−j(100π t−179)
2
]+ 3, 1823 e−5 t(4.96)
vC(t) = 3, 1826 cos(100π t− 179) + 3, 1823 e−5 t (4.97)
vC(t) = 3, 1826 sen(100π t− 89) + 3, 1823 e−5 t (4.98)
que se grafica en la fig. 4.29.
1
2
3
-1
-2
-3
1 2 3 4 t[s]
vC(t)[V ]
Figura 4.29: Caıda de tension en el capacitor del ejercicio 8.
Ejercicio 9 Planteo y resolucion numerica
Para t > 0, la suma de tensiones en las mallas es
1 = 4i1(t) + i′1(t) + vC(t)
0 = 4i2(t) + i′2(t)− vC(t)
la corriente neta por el capacitor es i1(t)− i2(t) = C dvCdt , de donde
0 = 2i1(t)− 2i2(t)− v′c(t)
transformando por Laplace estas tres ecuaciones quedan
4I1(s) + sI1(s)− i1(0) + VC(s) = 1/s
4I2(s) + sI2(s)− i2(0)− VC(s) = 0
2I1(s)− 2I2s− sVC + vC(0) = 0
o en su forma matricial(s+ 4) 0 1
0 (s+ 4) −12 −2 −s
I1(s)I2(s)VC(s)
=
1/s0−1

4.5. TEOREMA DE CONVOLUCION 139
La corriente I1(s) se calcula
I1(s) =∆11
∆p
para la cual hace falta calcular el determinante sistituto ∆11 y el de-terminante principal. El deteminante principal de esta matriz es
∆p =
∣∣∣∣∣∣
(s+ 4) 0 10 (s+ 4) −12 −2 −s
∣∣∣∣∣∣= −s(s+ 4)2 − 2(s+ 4)− 2(s+ 4)
= −(s+ 4)[s(s+ 4) + 4]
= −(s+ 4)(s2 + 4s+ 4)
= −(s+ 4)(s+ 2)2
mientras que el sustituto se calcula
∆11 =
∣∣∣∣∣∣
1/s 0 10 (s+ 4) −1−1 −2 −s
∣∣∣∣∣∣= −(s+ 4) + (s+ 4)− 2/s
= −2/s
entonces
I1(s) =2
s(s+ 4)(s+ 2)2
Desarrollando I1(s) en fracciones simples
I1(s) =A
s+
B
(s+ 4)+
C
(s+ 2)2+
D
(s+ 2)
I1(s) =1/8
s− 1/8
(s+ 4)− 1/2
(s+ 2)2
donde A = 1/8, B = −1/8, C = −1/2 y D = 0
Las fracciones obtenidas son trasformadas de funciones conocidas, esdecir que podemos encontrar la funcion en el tiempo cuya transforma-da se I1(s), en efecto
i1(t) =1
8− 1
8e−4t − 1
2te−2t
que se grafica en la fig. 4.30.

140 CAPITULO 4. TRANSFORMADA DE LAPLACE
0.125
1 2 3 4 t[s]
i1(t)[A]
Figura 4.30: Corriente de la malla 1 del circuito de la fig. 4.15
Ejercicio 10 Planteo
Con el interruptor en la posicion 1 la suma de tensiones en la malla es
V = Ri(t) + Ldi(t)
dtV
s= RI(s) + L [sI(s)− i(0)] = [R+ sLI(s)]
donde I(s) = L [i(t)]. Despejando I(s) y expandiendo en fraccionessimples
I(s) =V
s(R+ sL)=
V/R
s− V/R
(s+R/L)
i(t) = L−1
[V/R
s− V/R
(s+R/L
]=
V
R(1− e−
RLt)
Al pasar el interruptor de la posicion 1 a la 2 en t0 = 85 × 10−3slas condiciones inicales afectan a las funciones temporales de tensionesy corrientes en un tiempo t = t0, y la transfomada de Laplace estecorrimiento debe tenerse en cuenta. La ecuacion de equilibrio de lamalla se plantea considerando la referencia de vC(t)
vR(t) + vL(t)− vC(t) = 0
Ri(t) + Ldi(t)
dt− vC(t) = 0 (4.99)
como la tension en el capacitor vC(t) es una subida para la corrientei(t), su relacion es inversa aditiva
i(t) = −C dvC(t)
dt(4.100)

4.5. TEOREMA DE CONVOLUCION 141
Para despejar la funcion incognita vC(t), se transfoman las ecuaciones(4.99) y (4.100)
RI(s) + sLI(s)− Li(t0)e−st0 − VC(s) = 0
I(s) = −sCVC(s) + Cv(t0)e−st0
y se resuelve el sistema de ecuaciones para VC(s)
VC(s) = e−st0
[sv(t0) +
RLv(t0)− 1
Ci(t0)
s2 + RLs+ 1
LC
]
Resolucion numerica
La corriente en el dominio del tiempo es
i(t) = 20× 10−3(1− e−6t
)(4.101)
Para resolver vC(t) se debe desarrollar VC(s) en fracciones simples. Seusa t0 en lugar de su valor numerico para simplificar la escritura
VC(s) = e−st0
[s20 + 80
s2 + 6s+ 10
]= e−st0
[s20 + 80
(s+ 3 + j)(s+ 3− j)
]=
Ae−st0
s+ 3 + j+
A∗e−st0
s+ 3− j
A = lıms→−3−j
s20 + 80
(s+ 3− j)= 10 + j10
A∗ = 10− j10
entonces
VC(s) =
(10 + j10
s+ 3 + j+
10− j10
s+ 3− j
)e−s85×10−3
(4.102)
La transformada inversa de VC(s) es una funcion compleja, mediantela igualdad de Euler se pone en terminos de funciones trigonometricas
vC(t) =[(10 + j10)e−(3+j)(t−t0) + (10− j10)e−(3−j)(t−t0)
]u(t− t0)
vC(t) = e−3(t−t0)[(10 + j10)e−j(t−t0) + (10− j10)ej(t−t0)
]u(t− t0)
vC(t) = 20e−3(t−t0)
[(ej(t−t0) + e−j(t−t0)
2
)+
(ej(t−t0) − e−j(t−t0)
2j
)]u(t− t0)
Finalmente
vC(t) = 20e−3(t−t0) [cos(t− t0) + sen(t− t0)]u(t− t0)

142 CAPITULO 4. TRANSFORMADA DE LAPLACE
Ejercicio 11 Solucion
i(t) =183, 33
1566, 66
(1− e−1566,66t
)u(t)
Ejercicio 12 Solucion
i(t) =(1− e−2t
)u(t)A
Ejercicio 13 Solucion
vC(t) = 3(1− e−250t
)u(t)− 3
(1− e−250(t−1)
)u(t− 1)
Ejercicio 27 Para t > 0, eligiendo las referencias de tension y corriente en formaadecuada, en la malla RC se cumple
IC(s) + Io(s) = 0 (4.103)
VC(s) = Vo(s) (4.104)
donde
IC(s) = sCVC(s)− CvC(0) (4.105)
Io(s) =Vo(s)
Ro(4.106)
siendo Ro la resistencia de 20Ω. Operando se tiene
VC(s) =vC(0)
s+ 1RoC
= Vo(s) (4.107)
Para determinar vC(0) se puede aplicar el metodo fasorial y encontrarel regimen permanente en t = 0−, o buscar la respuesta forzada resol-viendo la ODE no homogenea del circuito en terminos de la tensionvC(t).
Llamando Ri a la resistencia de 6Ω, por metodo fasorial, en t = 0− secumple
V = VRi+ VC (4.108)
IRi= IC + IRo (4.109)

4.5. TEOREMA DE CONVOLUCION 143
reemplazando y operando
V = IRiRi + VC (4.110)
=(IC + IRo
)Ri + VC (4.111)
=
(jωCVC +
VC
Ro
)Ri + VC (4.112)
= VC
(jωCRi +
Ri
Ro+ 1
)(4.113)
Luego
VC =V(
jωCRi +Ri
Ro+ 1) =
220
j100 · 1× 10−3 + 620 + 1
(4.114)
VC = 139,512− j64,390 = 153,65 6 − 24,77 (4.115)
en t = 0
vC(0) = 153,65√2 cos(−24,77) = 197,3 (4.116)
entonces
Vo(s) =vC(0)
s+ 1RoC
=197,3
s+ 50(4.117)
Antitransformando, la tension de salida para t > 0 sera
vo(t) = 197,3e−50t (4.118)
.

144 CAPITULO 4. TRANSFORMADA DE LAPLACE

Capıtulo 5
Metodo fasorial
5.1. Calculo fasorial
El calculo fasorial es un metodo que permite obtener de una forma sen-cilla la respuesta de regimen permanente de un circuito excitado con senalessinusoidales. Es decir, resuelve en forma directa la respuesta forzada de laODE de equilibrio del circuito cuando la fuente forzante es de tipo sinusoi-dal. El metodo se basa en la representacion de la senal electrica mediante unvector complejo o fasor, lo cual permite transformar la ODE en una ecuacionalgebraica.
5.1.1. Fundamentacion
Supongase un circuito excitado con una fuente senoidal de la forma
v(t) = Vm sen(ωt+ θv) (5.1)
esta fuente, segun la igualdad de Euler, tambien puede escribirse como
v(t) = Im[Vm ej(ωt+θv)
](5.2)
si se trata de una fuente cosenoidal se puede escribir tomando la parte realde la exponencial anterior
v(t) = Vm cos(ωt+ θv) = Re[Vm ej(ωt+θv)
](5.3)
Es decir que si se alimenta al sistema con una fuente exponencial de forma
v(t) = Vm ej(ωt+θv) = Vm cos(ωt+ θv) + j Vm sen(ωt+ θv) (5.4)
se estara alimentando con dos fuentes sinusoidales, una real y otra imagi-naria, las que por teorema de superposicion generaran dos respuestas inde-pendientes, una real debida a Vm cos(ωt+ θv) y la otra imaginaria debida a
145

146 CAPITULO 5. METODO FASORIAL
j Vm sen(ωt+ θv). Luego, la respuesta de interes sera la parte imaginaria ola parte real de la respuesta encontrada, segun sea la fuente de alimentacionque excite al circuito de tipo senoidal o cosenoidal respectivamente.
Utilizar una fuente exponencial como la (5.4) para excitar un circuitopresenta ciertas ventajas de calculo que facilitan la obtencion de la respuestaforzada, ya que no se necesita resolver la ODE de equilibrio del sistema.
5.1.2. Fasor y fasor armonico
En ingenierıa, se llama fasor armonico a la representacion compleja deuna senal sinusoidal (como la (5.4)). Este fasor armonico se compone deun vector fijo (ejθv) y un vector rotante que gira a ω radianes por segundo(ejωt). La parte fija junto con el modulo del vector se lo llama simplementefasor, y es la representacion en t = 0 del fasor armonico.
Tomando como ejemplo la (5.4) tenemos
Vm ej(ωt+θv)
︸ ︷︷ ︸fasor armonico
= Vm︸︷︷︸fasor
ejωt (5.5)
con
Vm = Vmejθv (5.6)
el fasor formado por la amplitud Vm y la fase inicial θv de la senal querepresenta el fasor armonico1 (5.5).
En la figura 5.1 se puede ver graficamente un fasor armonico, un incre-mento de tiempo positivo se representa por convension como una rotacionantihoraria del vector.
Im
Re
θvωt′ + θv
ejθv
ej(ωt′+θv)
ωt
Figura 5.1: Fasor armonico en t = 0 y t = t′
1En este caso las senales (5.1) o (5.3), segun se tome, respectivamente, la parte imagi-naria o real del fasor armonico.

5.2. RELACION TENSION-CORRIENTE FASORIAL 147
Consideraciones practicas
Para simplificar la notacion el fasor habitualmente se escribe en notacionpolar2
Vm = Vm 6 θv
Debido a que en las aplicaciones electricas se utilizan normalmente losvalores eficaces de tensiones y corrientes, se prefiere la utilizacion del va-lor eficaz de la senal sinusoidal en la representacion fasorial. Esto se hacesimplemente dividiendo el valor maximo por
√2.
V =Vm√2
= Vef 6 θv (5.7)
en adelante se utiliza esta convension para la representacion fasorial.
Segun lo anterior, una senal sinusoidal general de forma
y(t) = A cos(ωt± η) (5.8)
tiene asociado un fasor
P[y(t)] = Y (5.9)
tal que
Y =A√26 ± η (5.10)
la transformacion (5.9) se conoce con el nombre de transformada fasor3.Esta transformada mapea una funcion sinusoidal (dominio del tiempo) enun vector complejo (que se dice esta en el dominio de la frecuencia complejajω), y su derivada (o integral) en otro vector complejo que se relaciona conel primero mediante una operacion algebraica. Por esta propiedad hace queuna ODE en el dominio del tiempo se transforme en una ecuacion algebraicaen el dominio de jω, como se vera mas adelante.
5.2. Relacion tension-corriente fasorial
Para poder aplicar esta nueva representacion compleja de las senales deexcitacion, debemos determinar cual sera la respuesta de corriente de cadaelemento ante una excitacion como esta, es decir determinar la relaciontension-corriente fasorial para cada elemento.
2Aunque para operaciones de suma o resta se prefiere la notacion rectangular3Notar que tanto una senal senoidal como una cosenoidal tiene el mismo fasor asociado,
por lo que la transformada fasor no es unica.

148 CAPITULO 5. METODO FASORIAL
5.2.1. Resistor
La relacion tension-corriente en un elemento resistivo puro, segun Leyde Ohm es
i(t) =v(t)
R
Si la excitacion v(t) es una senal cosenoidal, segun lo visto en el parrafoanterior, esta senal puede ser representada mediante un fasor armonico
v(t) = Re[V√2ejωt
](5.11)
luego
i(t) =Re[V√2ejωt
]
R= Re
[V√2ejωt
R
](5.12)
que tambien es un fasor armonico, ya que al dividir un complejo por elescalar R se obtendra otro complejo con su modulo escalado. Este nuevofasor armonico que representa a la corriente i(t) se puede escribir
Re
[V√2ejωt
R
]= Re
[I√2ejωt
](5.13)
Si ahora consideramos una excitacion senoidal, las ecuaciones anterioresseran identicas solo que se debera tomar la parte imaginaria de cada fa-sor armonico.
En general podemos decir que en un resistor la relacion fasorial tension-corriente sera
V√2ejωt
R= I√2ejωt (5.14)
es decir
I =V
R=
Vef
R6 θv = Ief 6 θi (5.15)
con Ief =Vef
Ry θi = θv.
En base las ecuaciones anteriores vemos que si se multiplica una funcionsinusoidal por un escalar, el fasor asociado tambien se multiplica por elmismo escalar
P[i(t)] = I
P[Ri(t)] = RI = V (5.16)

5.2. RELACION TENSION-CORRIENTE FASORIAL 149
IV R
(a)
IV jωL
(b)
Figura 5.2: Relacion tension-corriente fasorial en una resistencia y un inductor
5.2.2. Inductor
Para el caso de una carga inductiva pura de valor L
i(t) =1
L
∫v(t) dt (5.17)
si la excitacion es un fasor armonico entonces la corriente sera
i(t) =1
L
∫V√2ejωt dt =
V
jωL
√2ejωt (5.18)
esto es un cociente entre dos complejos, donde el denominador es un imagi-nario puro. Operando
i(t) =V
jωL
√2ejωt =
Vef
ωL6 (θv −
π
2)√2ejωt = I
√2ejωt (5.19)
que es otro fasor armonico donde
I = Ief 6 θi (5.20)
con Ief =Vef
ωLy θi = θv − π
2 . Notar el atraso de fase de π2 de la corriente
respecto de la tension aplicada, tal como se espera en un inductor ideal.De (5.19), la relacion tension-corriente fasorial en un inductor sera
V
I= jωL (5.21)
Observando la relacion tension-corriente del elemeento en el dominio deltiempo (5.17) y en el dominio de la frecuencia compleja (5.21) podemosestablecer la regla de integracion de la transformada fasor. La transformadafasor de la integral de una funcion sinusoidal se obtiene dividiendo por jωal fasor de la funcion
P[v(t)] = V
P[∫
v(t) dt
]=
V
jω(5.22)

150 CAPITULO 5. METODO FASORIAL
5.2.3. Capacitor
Finalmente, si se trata de una carga capacitiva pura de valor C tendremos
i(t) = Cdv(t)
dt
i(t) = jωCV√2ejωt = I
√2ejωt (5.23)
de donde la relacion tension-corriente fasorial sera
I = jωCV = Ief 6 θi (5.24)
con Ief = ωCVef y θi = θv +π2 . Notar en este caso el adelante de fase de
π2 de la corriente respecto de la tension aplicada, tal como se espera de uncapacitor ideal.
De las ecuaciones anteriores podemos establecer la regla de derivacionde la transformada fasor. La transformada de la derivada de una funcionsinusoidal se obtiene multiplicando por jω al fasor de la funcion
P[v(t)] = V
P[dv(t)
dt
]= jωV (5.25)
5.3. Resolucion de circuitos usando fasores
La aplicacion del metodo implica la utilizacion de las relaciones tensioncorriente fasoriales deducidas anteriormente. Para esto se plantea antes laecuacion de equilibrio en el dominio del tiempo para despues transformarlaal dominio de la frecuencia.
v(t) = 10 cos(3t)
2Ω
1Hi(t)
Figura 5.3: RL excitado con fuente de tension senoidal
La ecuacion de equilibrio del circuito de la figura 5.3 es
v(t) = vR(t) + vL(t) = R i(t) + Ldi(t)
dt
reemplazando las relaciones temporales por las relaciones fasoriales deduci-das anteriormente, se obtiene la ecuacion de equilibrio en el dominio de lafrecuencia.
V = VR + VL = R I+ jωL I (5.26)

5.3. RESOLUCION DE CIRCUITOS USANDO FASORES 151
Como vemos, la ecuacion diferencial se convierte en una ecuacion algebraicaen terminos de los fasores de excitacion y respuesta, llamada ecuacion de
equilibrio fasorial. De esta ecuacion podemos obtener la respuesta I simple-mente dividiendo ambos miembros por R+ jωL
I =V
(R+ jωL)(5.27)
esto es un cociente de numeros complejos, en forma polar sera
I =Vef
6 θvZ 6 ϕ
= Ief 6 θi (5.28)
donde Z =√R2 + (ωL)2 y ϕ = arctan
(ωLR
), entonces el fasor corriente
tendra
Ief =Vef√
R2 + (ωL)2(5.29)
y
θi = θv − arctan
(ωL
R
)= θv − ϕ
como modulo y argumento respectivamente. Notese que el argumento delfasor corriente θi se forma restando al argumento del fasor tension el anguloϕ, que es el argumento del denominador. El denominador de (5.27) dependede los elementos que conforman el circuito y su argumento puede ser mayoro menor a 0. Si ϕ > 0 se dice que la corriente atrasa a la tension, y si ϕ < 0se dice que la corriente adelanta a la tension. Si ϕ = 0 la corriente y latension estan en fase.
Siguiendo con el ejemplo, el fasor de tension del circuito es
V =10√26 0
el modulo Z y la fase ϕ del denominador (5.27) valen
Z =√22 + (ω1)2 = 3,6056Ω (5.30)
ϕ = arctan
(3
2
)= 0,98279rad = 56,31 (5.31)
entonces
I =10
3,6056√26 − 56,31 = 1,96116 − 56,31 (5.32)

152 CAPITULO 5. METODO FASORIAL
5.4. Impedancia y admitancia compleja
La relacion fasorial entre tension y corriente es en general un numerocomplejo, puesto que como puede verse en la (5.27), V e I son complejos.A esta relacion fasorial se la denomina impedancia compleja o simplementeimpedancia, la unidad de mediada es el ohm [Ω] y se la representa con laletra Z.
La relacion tension-corriente en un elemento resistivo puro es, como sevio en (5.15), el valor resistivo R. Este cociente es la impedancia de unresistor, que usualmente se la llama tambien resistencia por tratarse delmismo valor numerico que en el dominio del tiempo. Si el cociente de doscomplejos, o dos fasores, es un numero real, significa que los fasores estanen fase, tal como se espera que ocurra en los fasores de tension y corrienteen un resistor.
En el caso de un inductor la impedancia sera un numero imaginariopuro (ec. 5.21). Este cociente siempre positivo (ya que ni ω ni L pueden sernegativos). Se lo llama reactancia inductiva, se denota jXL. Si el cocienteentre el fasor tension y el fasor corriente da un numero imaginario mayor a0, significa que entre ellos hay un desfasaje de π
2 , es decir que la corrienteatrasa 90 a la tension en el inductor.
Para un capacitor sera tambien un imaginario puro pero menor a 0 (ec.5.24). A esta impedancia se la llama reactancia capacitiva y se la represenatacon −jXC . El defasaje entre el fasor tension y el fasor corriente es de −π
2 loque significa que la corriente adelanta a la tension en 90.
En un circuito con varios elementos combinados, el cociente sera en formageneral
Z =V
I
esta ecuacion es la Ley de Ohm Fasorial.Si en general se tiene que V = V 6 θv e I = I 6 θi entonces
Z =V
I6 θv − θi
Z = Z 6 ϕ (5.33)
Este complejo esta formado por una parte real y una imaginaria
Z = Ri± jX (5.34)
a la parte real se la llama parte resistiva de la impedancia y a la parte imagi-naria parte reactiva de la impedancia. La parte imaginaria puede ser positivao negativa, si es mayor a 0 se llama reactancia inductiva y se dice que laimpedancia es de caracter inductivo (o simplemente impedancia inductiva),si es menor a 0 se llama reactancia capacitiva y se dice que la impedancia

5.4. IMPEDANCIA Y ADMITANCIA COMPLEJA 153
es de caracter capacitivo (impedancia capacitiva). Se la representa grafica-mente en un diagrama de impedancias sobre un plano complejo, en el cualse marcan las componentes resistivas y reactivas (fig. 5.4).
ImIm
ReRe
jωL
RR
ϕ1Z1
Z1
Z2
ϕ2
Z2−j 1
ωC
Impedancia inductiva Impedancia capacitiva
Figura 5.4: Diagrama de impedancias
La relacion entre la parte real e imaginaria de la Z determinan el desfa-saje entre el fasor tension y el fasor corriente, o sea el angulo ϕ de (5.33).Este angulo esta definido entre −π
2 ≤ ϕ ≤ π2 , segun el circuito sea capacitivo
puro o inductivo puro en los extremos, pasando por resistivo puro cuandoϕ = 0.
La inversa de la impedancia se define como admitancia compleja. Susimbolo es Y , se mide en Siemens [S] o Mhos []
Y =1
Z=
1
Z6 − ϕ (5.35)
las partes real e imaginaria de este complejo se las representa con las letrasG y B respectivamente, donde G se llama conductancia y B susceptancia.La susceptancia, al igual que la reactancia, puede ser positiva o negativa. Sies positiva se trata de una susceptancia capacitiva, y si es negativa se tratade una susceptancia inductiva.
Y = G+ jB (5.36)
En terminos de tension y corriente fasorial, por ser la inversa de la im-pedancia, la admitancia se define como el cociente fasorial entre la corrientey tension
Y =I
V⇒ (5.37)
I = VY (5.38)
La ecuacion 5.38 es muy importante, ya que la admitancia es directamen-te proporcional a la corriente fasorial. Por lo tanto conociendo la admitanciade un circuito, o la variacion de la admitancia de un circuito cuando en estevaria algun parametro, como por ejemplo la frecuencia ω, se conoce tambienla variacion de la corriente. Esto sera utilizado mas adelante para analisisde variacion de corriente en ciruitos alimentados con un fasor de tensionconstante.

154 CAPITULO 5. METODO FASORIAL
5.4.1. Conversion impedancia-admitancia
Pasar de impedancia a admitancia en forma polar es simplemente hacerla inversa del modulo y tomar el argumento opuesto (ec. 5.35). La mismaconversion en forma rectangular sera
Z = R+ jX (5.39)
Y =1
(R+ jX)=
1
(R+ jX)
R− jX
R− jX(5.40)
Y =R− jX
R2 +X2=
(R
R2 +X2
)− j
(X
R2 +X2
)(5.41)
Y = G+ jB (5.42)
5.4.2. Asociacion de impedancias
Al aplicar el metodo fasorial la ODE de equilibrio de cualquier circuito,esta se transforma en una ecuacion algebraica, al igual que las ecuacionesde equilibrio que resultan de un circuito resistivo puro en el dominio deltiempo. Por lo tanto la asociacion de impedancias en serio o en paralelosigue las reglas de asociacion de resistencias en el dominio del tiempo.
Observando la resolucion del ejemplo anterior (5.26), vemos que la im-pedancia total, definida como el cociente entre el fasor tension aplicada y elfasor corriente total del circuito, se puede formar sumando las dos impedan-cias que conforman el circuito serie, o sea R y jωL, quedando
Z = R+ jωL (5.43)
5.4.3. Diagrama fasorial
Se llama diagrama fasorial a la representacion de los fasores de tensiony/o corrientes de un circuito en un plano complejo. Un diagrama puede serde tensiones o de corrientes, aunque generalmente se utiliza un diagramaunico de tensiones y corrientes, es decir un unico plano complejo, lo quepermite visualizar facilmente las diferencias de fase entre ambos.
Se dice que un diagrama fasorial de tensiones y corrientes es completocuando se representan en el los fasores de tension y corriente de todos loselementos que lo conforman. Ası por ejemplo, en el circuito de la figura5.3, los fasores de tension de cada elemento son V, VR y VL, mientras quepor ser un circuito serie todos los elementos comparten un unico fasor decorriente I. Para poder construir el diagrama fasorial completo es necesariocalcular los fasores restantes, es decir VR y VL, siendo
VR = R I = 3,926 − 56,31 (5.44)
y
VL = jωL I = (j3)1,966 − 56,31 = 5,88 6 33,69 (5.45)

5.5. POTENCIA 155
En la figura 5.5 se grafica el diagrama fasorial completo de este ejemplo.Como puede verse, la corriente total esta atrasada de la tension total, debidoal caracter inductivo de la carga. Ademas la suma del fasor tension en elinductor (que esta adelantado 90 respecto del fasor corriente) mas el fasortension en la resistencia (que esta en fase con el fasor corriente) es igualal fasor tension aplicado. Notar que para construir el diagrama fasorial, losfasores que al ser sumados componen un nuevo fasor (como en este caso queal sumar los fasores de tension en R y en L se obtiene el fasor de tensiontotal) se dibujan uno a continuacion del otro, para mostrar en forma explicitaque la suma vectorial da el fasor resultante.
V
VR
VL
I
33,69
−56,31
−56,31
Im
Re
Figura 5.5: Diagrama fasorial de tensiones y corriente del circuito de la figura 5.3
5.5. Potencia
Un circuito en regimen permanente constituıdo por resistencias, induc-tores y capacitores toma y devuelve energıa del generador en cada ciclo. Detoda la energıa presente en un circuito parte sera transformada en trabajoy parte sera intercambiada periodicamente con el generador, dependiendoexclusivamente de los elementos que compongan el circuito.
5.5.1. Potencia instantanea
Una senal senoidal de la forma
v(t) = Vm sen(ωt)
que excita a un circuito generico de impedancia equivalente Z = R+ jX =Z 6 ϕ, produce una corriente electrica de forma
i(t) = Im sen(ωt− ϕ)
la potencia instantanea producida por esta fuente se obtiene
p(t) = v(t) i(t)
p(t) = Vm sen(ωt) Im sen(ωt− ϕ)

156 CAPITULO 5. METODO FASORIAL
Utilizando la igualdad trigonometrica senα senβ = 12 cos(α−β)−1
2 cos(α+β) se puede expresar la potencia anterior en terminos de cosenos
p(t) =VmIm2
cos(ϕ)− VmIm2
cos(2ωt− ϕ)
con α = ωt y β = ωt− ϕ. Ademas, como Vm√2= V e Im√
2= I se puede poner
en terminos de los valores eficaces
p(t) = V I cos(ϕ)− V I cos(2ωt− ϕ) (5.46)
La ecuacion (5.46) esta compuesta de un termino constante en el tiem-po y otro variable. La amplitud del termino constante V I cos(ϕ) dependedel valor de ϕ, es decir del caracter inductivo-capacitivo del circuito. Cuan-do ϕ = 0 el termino V I cos(ϕ) tomara su valor maximo. Analicemos losdiferentes casos segun la naturaleza del circuito.
Circuito resistivo puro
Si el circuito es de tipo resistivo puro, la impedancia es Z = R y ϕ = 0.Entonces la potencia instantanea queda
p(t) = V I − V I cos(2ωt)
En la figura 5.6 puede verse graficada esta potencia instantanea. Lapotencia en un circuito resistivo puro es siempre positiva y su valor medioes P = V I. Esto es caracterıstico de los elementos disipativos en los cualestoda la energıa entregada por el generador es disipada en forma de calor.
t
vR(t)
t
iR(t) V I
t
p(t)
Figura 5.6: Potencia instantanea en un circuito resistivo puro.
Circuito inductivo puro
Si el circuito es inductivo puro, entonces la impedancia es Z = jωL yϕ = 90. En este caso la potencia instantanea se hace
p(t) = −V I cos(2ωt− 90) = −V I sen(2ωt)

5.5. POTENCIA 157
t
vL(t)
t
iL(t)
t
p(t)
Figura 5.7: Potencia instantanea en un circuito inductivo puro.
En la figura 5.7 se grafica la potencia instantanea sobre un circuito in-ductivo puro. Como se ve en este caso el valor medio de la senal es nulo,es decir la potencia media. Por otro lado la potencia instantanea toma va-lores positivos y negativos, esto representa el intercambio energetico que seproduce entre el elemento inductivo y el generador. Cuando la tension v(t)y corriente i(t) tienen igual signo, la potencia es positiva lo que significaque la energıa se esta trasladando desde el generador a la carga inductiva.Cuando tension y corriente tienen distinto signo, la potencia es negativa yla energıa esta siendo devuelta desde la carga al generador. Evidentementelas cantidades de energıa recibidas y devueltas por la carga inductiva soniguales debido a que se trata de un elemento idealizado y no hay disipacionalguna.
Circuito capacitivo puro
Para el caso de un circuito capacitivo puro el angulo de fase es ϕ = −90y la potencia instantanea sera
p(t) = −V I cos(2ωt+ 90) = V I sen(2ωt) (5.47)
al igual que el caso anterior la potencia instantanea tiene valor medio nulolo que muestra un intercambio completo de energıa entre el generador y elelemento, sin producirse disipacion.
t
vC(t)
t
iC(t)
t
p(t)
Figura 5.8: Potencia instantanea en un circuito capacitivo puro.

158 CAPITULO 5. METODO FASORIAL
5.5.2. Potencia activa, reactiva y aparente
El valor medio de la potencia instantanea esta directamente relacionadocon la cantidad de energıa que un circuito disipa, y por ende con la com-ponente resistiva del mismo. Este valor medio recibe el nombre de potencia
activa de un circuito. La componente reactiva de un circuito determina lacantidad de energıa que se intercambiara en cada ciclo, el valor escalar aso-ciado a esta cantidad recibe el nombre de potencia reactiva, y por ultimose considera un escalar asociado a la potencia instantanea total que se lodenomina potencia aparente. A continuacion deduciremos cada uno de estosescalares utilizando el metodo fasorial.
Potencia en un elemento resistivo
En el calculo fasorial la circulacion de una corriente I y la caıda de tensionen cada elemento del circuito desarrollan una potencia, que por definicion,es el producto de los modulos de ambos fasores eficaces.
En un elemento resistivo, la potencia sera
P = |VR||IR| = VRIR
P = |VR||VR|R
=(VR)
2
RP = |IR|R|IR| = (IR)
2R
como R = |Z| cosϕ, la ultima de estas igualdades se puede poner4
P = (IR)2Z cosϕ
P = V I cosϕ (5.48)
donde V = IRZ e IR = I. Es decir, debido a los elementos resistivos delcircuito se desarrolla una potencia activa P , medida en vatios [W ], dada porel producto de los valores eficaces de tension y corriente total multiplicadopor el coseno del angulo de desfasaje ϕ que hay entre ellos. Esta potenciaes igual al valor medio de la potencia instantanea obtenida en la ec. (5.46),tambien llamada potencia media P , y representa la capacidad del circuitopara realizar un trabajo en un tiempo dado.
4Esto es cierto si se trata de un circuito serie, donde IR = I, corriente total en elcircuito. Si se trata de un circuito paralelo entonces VR = V , tension aplicada total,llegandose al mismo resultado que ec. (5.48)

5.5. POTENCIA 159
Potencia en un elemento reactivo
En un elemento inductivo o capacitivo la potencia viene dada por
Q = |VX||IX| = VXIX
Q = |VX||VX|X
=(VX)2
XQ = |IX|X |IX| = (IX)2X
como el modulo de la parte reactiva X de una impedancia es |Z| senϕ
Q = (IX)2Z senϕ
Q = V I senϕ (5.49)
es decir, debido a los elementos reactivos de la carga se desarrolla una po-tencia reactiva Q, medida en voltamperios reactivos [V AR]. Esta potenciaQ es una medida de la energıa almacenada que es devuelta hacia la fuentedurante cada ciclo de la corriente alterna.
Potencia en una impedancia
En general, un fasor de corriente que atraviesa una impedancia Z comoconsecuencia de un fasor de tension aplicada V, desarrolla una potencia
S = |V||I| = V I
esta potencia se llama potencia aparente, se la denomina con la letra S yse mide en voltamperios [V A], representa las potencias disipadas e inter-cambiadas por los elementos del circuito. Como se ve, este producto de latension por la intensidad, sera siempre igual o mayor que la potencia activa.
5.5.3. Triangulo de potencias
Las potencias activas, reactivas y aparente estan vinculadas entre sı, deforma que si sumamos las potencias activas y reactivas al cuadrado
P 2 +Q2 = (V I cosϕ)2 + (V I senϕ)2 = (V I)2 (5.50)
obtenemos la potencia aparente al cuadrado,
S2 = P 2 +Q2 (5.51)
es por esta relacion que se utiliza un triangulo rectangulo para representarlas,lo que se conoce como triangulo de las potencias.
La construccion del triangulo se puede desprender del diagrama fasorialde tension y corriente del circuito en cuestion. Considerando la tension totalcon fase cero y la descomposicion de la corriente en sus partes activas y

160 CAPITULO 5. METODO FASORIAL
reactivas, es decir, V = V 6 0 e I = I 6 ϕ, la potencia P sera la proyeccion de Isobre V (V I cosϕ) y la potenciaQ la proyecccion de I sobre la perpendiculara V (V I senϕ) multiplicadas ambas por V .
De esta forma la orientacion de la potencia reactiva Q en el triangulodetermina el caracter inductivo o capacitivo del circuito, ya que una potenciareactiva dibujada hacia los negativos del eje de ordenadas se obtiene de undiagrama fasorial en el que la corriente atrasa a la tension, y viceversa.
5.5.4. Potencia compleja S
Se conoce como potencia compleja a un operador complejo que permiteencontrar en forma directa las potencias activas, reactivas y aparente de uncircuito conociendo el fasor tension y corriente total. Sea VT el fasor dela tension aplicada total y sea IT el fasor de la corriente total, entonces lapotencia compleja S se calcula como
S = VT I∗T (5.52)
con I∗T el conjugado del fasor corriente.Desarrollando (5.52) tenemos
S = VT 6 θV IT 6 − θI (5.53)
S = VT 6 θVVT
ZT
6 − (θV − ϕ) (5.54)
S = VT IT | 6 ϕ = VT IT cosϕ+ jVT IT senϕ = P + jQ (5.55)
5.5.5. Factor de potencia
El factor de potencia de un sistema de corriente alterna en regimen per-manente se define como la relacion entre la potencia activa P y la potenciaaparente S.
fp =P
S
En un circuito puramente resistivo recorrido por una corriente alterna,la intensidad y la tension estan en fase, esto es cambian de polaridad enlos mismos instantes en cada ciclo. Cuando estan presentes cargas reactivasexiste almacenamiento de energıa. Debido a que esta energıa almacenadaretorna a la fuente y no es util para realizar trabajo en la carga, un circuitocon un bajo factor de potencia tendra que transferir corrientes mas altas,para una potencia dada, que un circuito con un factor de potencia alto.
Si ϕ es el angulo de fase entre la corriente y la tension, el factor depotencia es igual a |cosϕ|, y
P = S cosϕ (5.56)
5.5. POTENCIA 161
Por definicion, el factor de potencia es un numero adimensional, com-prendido entre 0 y 1. Cuando el factor de potencia es igual a 0, la energıaque fluye es enteramente reactiva y la energıa almacenada en las cargas re-torna a la fuente en cada ciclo. Cuando el factor de potencia es igual a 1,toda la energıa suministrada por la fuente es consumida por la carga. Losfactores de potencia son expresados normalmente como adelanto o retraso,para indicar el signo del angulo de fase.
Por ejemplo, para conseguir 1kW de potencia activa si el factor de po-tencia es la unidad, necesitaremos transferir 1kVA de potencia aparente(1kVA = 1kW · 1). Con valores bajos del factor de potencia, necesitaremostransferir mas potencia aparente para conseguir la misma potencia activa.Ası para conseguir 1kW de potencia activa con un factor de potencia iguala 0,2 necesitamos transferir 5kVA de potencia aparente.
5.5.6. Correccion del factor de potencia
La energıa transportada que no se consume produce perdidas, sobrecargalos transformadores y disminuye la eficiencia. Si el factor de potencia es altoestas perdidas seran bajas, aumentando el rendimiento del sistema. A vecesse hace necesario corregir el factor de potencia para aumentar el rendimientodel sistema, sobre todo en sistemas de grandes potencias instaladas comolas industrias.
La correccion del factor de potencia se logra conectando al sistema car-gas reactivas (generalmente en paralelo para no modificar la tension dis-ponible) de naturaleza contraria a la que el sistema tiene, es decir en unsistema resistivo-inductivo se conenctaran cargas capacitivas y viceversa.Normalmente se trata de sistemas resistivo-inductivos los que se necesitacompensar, debido al uso de motores en la industria.
El calculo de la potencia reactiva necesaria se realiza en base al factorde potencia deseado como sigue.
Supongamos se desea llevar el factor de potencia acual fp0 al factor depotencia fpf
fp0 = cosϕ0 y
fpf = cosϕf
ambos en atraso, sin que varıe la potencia activa P . Para compensar un sis-tema en atraso se conecta entonces una carga capacitiva de potencia reactivaQC tal que
Qf = Q0 −QC ⇒ QC = Q0 −Qf
reemplazando las potencias reactivas segun (5.49) tenemos
QC = V I0 senϕ0 − V If senϕf
= V I0 cosϕ0 tanϕ0 − V If cosϕf tanϕf (5.57)

162 CAPITULO 5. METODO FASORIAL
donde la tension permanece constante porque la carga se contecta en pa-ralelo. Como la potencia activa no cambia, P = V I0 cosϕ0 = V If cosϕf ,entonces
QC = P (tanϕ0 − tanϕf )
de donde se puede hallar la capacidad necesaria para la correccion
V 2
XC
= V 2ωC = P (tanϕ0 − tanϕf )
C =P (tanϕ0 − tanϕf )
V 2ω(5.58)
5.6. Senales poliarmonicas
5.6.1. Desarrollo de senales en serie de Fourier
Una senal f(t) cuadrado integrable5 puede ser representada en un unintervalo [a, b] en diferentes bases o conjuntos de funciones (vectores) orde-nados y linelamente independiantes en un espacio de Hilbert. Por ejemplola representacion en serie de Taylor utiliza como base las derivadas suce-sivas de la funcion. La serie de Fourier permite representar una senal enun intervalo [a, b] mediante la combinacion de senos y cosenos oscilando adistintas frecuencias. Es decir representa la funcion en terminos de una baseortonormal6 formada por
(1, cos(nω0t), sen(nω0t)) (5.59)
con n = 0, 1, 2, . . .∞.La serie resulta periodica de perıodo 2π, por estar formada por senos
y cosenos, y aproxima a la funcion en el intervalo [a, b]. Si la funcion f(t)es tambien periodica de perıodo T = b − a, entonces la serie aproxima a lafuncion para todo t.
5.6.2. Serie en senos y cosenos
La funcion periodica f(t) de perıodo T puede ser representada por laserie infinita
f(t) =a02
+∞∑
n=1
an cos(nω0t) +∞∑
n=1
bn sen(nω0t) (5.60)
5Una funcion es cuadrado integrable si la integral de su valor absoluto al cuadrado esfinita, es decir una funcion de energıa finita.
6Decimos que la base es ortonormal porque cada componente tiene producto internonulo con cualquier otro componente de la base y ademas el producto interno por sı mismoes igual a 1, por lo que su norma ||f(t)|| = 1.

5.6. SENALES POLIARMONICAS 163
con
an =1
π
∫ π
−π
f(t) cos(nω0t)dω0t (5.61)
bn =1
π
∫ π
−π
f(t) sen(nω0t)dω0t (5.62)
Para que la igualdad (5.60) sea verdadera, la serie debe converger af(t), si la funcion f(t) es cuadrado integrable entonces la serie converge yla igualdad se cumple. Una funcion que represente cualquier parametro decircuitos como tension o corriente es siempre cuadrado integrable, por lo quepara teorıa de los circuitos la igualdad (5.60) se cumple siempre.
El termino constante de (5.60) se obtiene de (5.61) haciendo n = 0
a02
=1
2π
∫ π
−π
f(t)dω0t (5.63)
que es el valor medio de la funcion f(t)Para n = 1 se obtienen los terminos que oscilan a menor frecuencia
a1 cos(ω0t) y b1 sen(ω0t)
esta frecuencia ω0 se llama frecuencia fundamental de la senal. Las fre-cuencias superiores a ω0 son todas multiplos de la funtamental, puesto quen = 2, 3, 4 . . . y se llaman armonicas (para n = 2 tenemos la primera armoni-ca ω1 = 2ω0, para n = 3 la segunda armonica ω2 = 3ω0, etc.). La relaciondel perıdo de la serie en radianes (2π) y el perıodo de la f(t) en segundos(T ) determina la frecuencia fundamental ω0
ω0 =2π
T(5.64)
5.6.3. Serie senoidal
Suele ser muy util representar la serie (5.60) solo con senos o cosenos,para lo que se necesita conocer la amplitud y fase de cada armonica. Siponemos la serie en terminos de senos, de forma
f(t) =c02
+∞∑
n=1
cn sen(nω0t+ φn) (5.65)
podemos expandir el sen(nω0t+ φn) en
sen(nω0t+ φn) = sen(nω0t) cos(φn) + cos(nω0t) sen(φn) (5.66)
y llevando a (5.65) nos queda
f(t) =c02
+
∞∑
n=1
[cn sen(nω0t) cos(φn) + cn cos(nω0t) sen(φn)] (5.67)

164 CAPITULO 5. METODO FASORIAL
igualando (5.67) con (5.60)
c0 = a0
cn cos(φn) = an
cn sen(φn) = bn
y despejando cn y φn tenemos
cn =√a2n + b2n
φn = tan−1
(anbn
)
5.6.4. Serie compleja
Una forma mas compacta y moderna de representar la serie de Fourieres utilizando la funcion exponencial compleja ejnω0t como base. Utilizandolas igualdades
cos(nω0t) =ejnω0t + e−jnω0t
2
sin(nω0t) =ejnω0t − e−jnω0t
2j
en la serie trigonometrica (5.60) y operando nos queda
f(t) =∞∑
n=−∞Cne
jnω0t (5.68)
con
Cn =1
2π
∫ π
−π
f(t)e−jnω0tdω0t (5.69)
Los coeficientes de la serie trigonometrica y la exponencial se relacionanacomo
an = Cn + C−n (5.70)
bn = j (Cn − C−n) (5.71)
Los coeficientes de Fourier de la serie exponencial Cn se representannormalmente con otra notacion, por ejemplo en matematica se utiliza nor-malmente la notacion
f(t) =
∞∑
n=−∞f(n)ejnω0t (5.72)
y en ingenierıa
f(t) =∞∑
n=−∞F [n]ejnω0t (5.73)
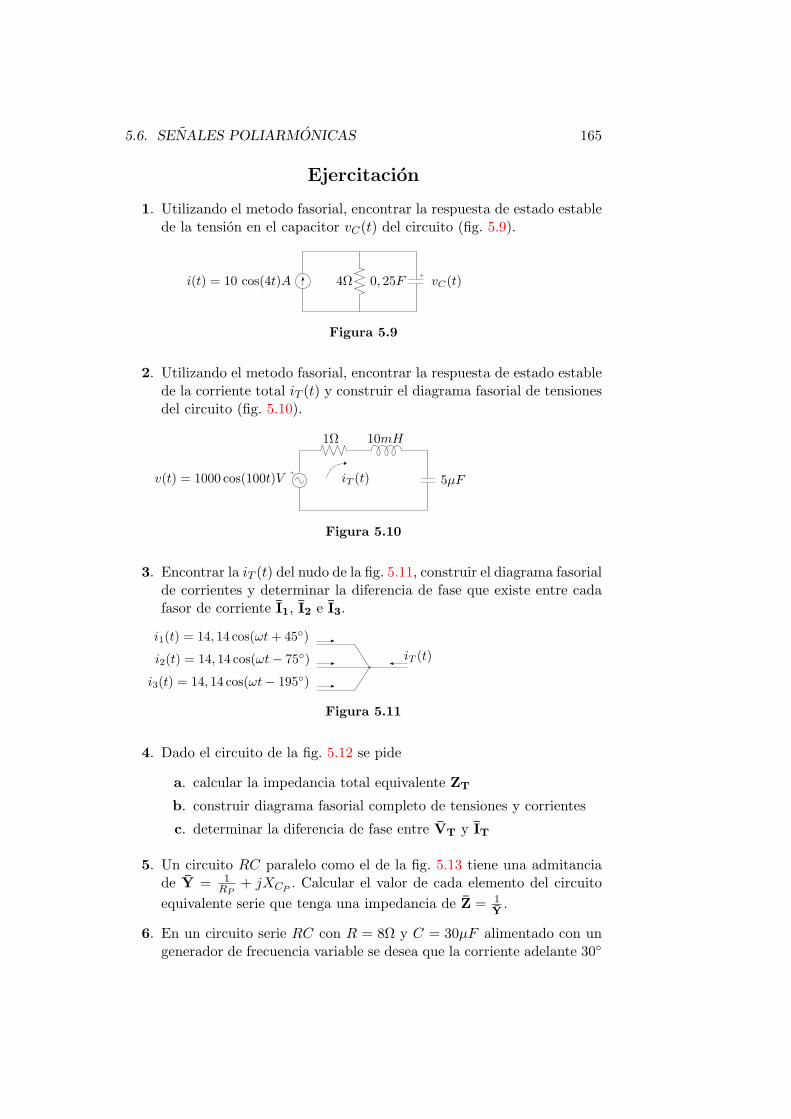
5.6. SENALES POLIARMONICAS 165
Ejercitacion
1. Utilizando el metodo fasorial, encontrar la respuesta de estado establede la tension en el capacitor vC(t) del circuito (fig. 5.9).
i(t) = 10 cos(4t)A 4Ω 0, 25F vC(t)
Figura 5.9
2. Utilizando el metodo fasorial, encontrar la respuesta de estado establede la corriente total iT (t) y construir el diagrama fasorial de tensionesdel circuito (fig. 5.10).
iT (t)
1Ω 10mH
5µFv(t) = 1000 cos(100t)V
Figura 5.10
3. Encontrar la iT (t) del nudo de la fig. 5.11, construir el diagrama fasorialde corrientes y determinar la diferencia de fase que existe entre cadafasor de corriente I1, I2 e I3.
i1(t) = 14, 14 cos(ωt+ 45)
i2(t) = 14, 14 cos(ωt− 75)
i3(t) = 14, 14 cos(ωt− 195)
iT (t)
Figura 5.11
4. Dado el circuito de la fig. 5.12 se pide
a. calcular la impedancia total equivalente ZT
b. construir diagrama fasorial completo de tensiones y corrientes
c. determinar la diferencia de fase entre VT y IT
5. Un circuito RC paralelo como el de la fig. 5.13 tiene una admitanciade Y = 1
RP+ jXCP
. Calcular el valor de cada elemento del circuito
equivalente serie que tenga una impedancia de Z = 1Y.
6. En un circuito serie RC con R = 8Ω y C = 30µF alimentado con ungenerador de frecuencia variable se desea que la corriente adelante 30

166 CAPITULO 5. METODO FASORIAL
2√2 IT
1
2
j1
−j2
Figura 5.12
RP XCP
RS
XCS
Y Z
Figura 5.13: Calculo simbolico
a la tension. Calcular a que frecuencia f debe oscilar el generador paraproducir dicho adelanto.
7. Las tensiones en los elementos de la figura 5.14 son
v1(t) = 70,7 sen(ωt+ 30)V
v2(t) = 28,3 sen(ωt+ 120)V
v3(t) = 14,14 cos(ωt+ 30)V
Aplicando el metodo fasorialse pide
a. calcular la tension vT (t)y corriente iT (t)
b. determinar la lectura delvoltımetro
c. construir el diagrama fa-sorial completo
vT (t) V
iT Z1
Z2
Z3 = 6 + j10
v1(t)
v2(t)
v3(t)
Figura 5.14: Regimen perma-nente senoidal
8. Encontrar la impedancia total equivalente del circuito de la fig. 5.15 yconstruir el diagrama fasorial de tensiones y corrientes.
9. Para el circuito de la figura 5.16 se pide
a. aplicando metodo fasorial encontrar el fasor de corriente total ITy su correspondiente i(t) (utilizar fasores eficaces)

5.6. SENALES POLIARMONICAS 167
1506 − 120 IT
10
25
j8
j3−j10
Figura 5.15
b. trazar diagrama fasorial de tensiones (VT, VR1, VL, VR2
=VC) y de corrientes (IT, Ia, Ib). Utilizar si se quiere dos graficasdiferentes para uno y otro diagrama
c. construir el triangulo de potencias del circuito.
50 cos(200t+ 70)V iT (t)ia ib
R1
R2 C
LDatos
R1 = 150Ω
R2 = 100Ω
C = 60µF
L = 500mH
Figura 5.16
10. Dado el circuito de la fig 5.17 se pide aplicar calculo fasorial para
a. encontrar el fasor de corriente total I y su correspondiente i(t)
b. calcular la tension eficaz VAB
c. hacer el diagrama fasorial considerando una Zeq entre los puntosA y B
d. deducir y calcular la potencia activa P entregada por la fuente
40 cos(500t)V
5Ω
16mH
500µF
500µFi(t)
A
B
Figura 5.17
11. Encontrar el valor de capacidad C que produce un atraso de corrien-te de 30 respecto de la tension aplicada en el circuito de la figura5.18. Hallar el fasor corriente total y construir el diagrama fasorial detensiones y corrientes completo.
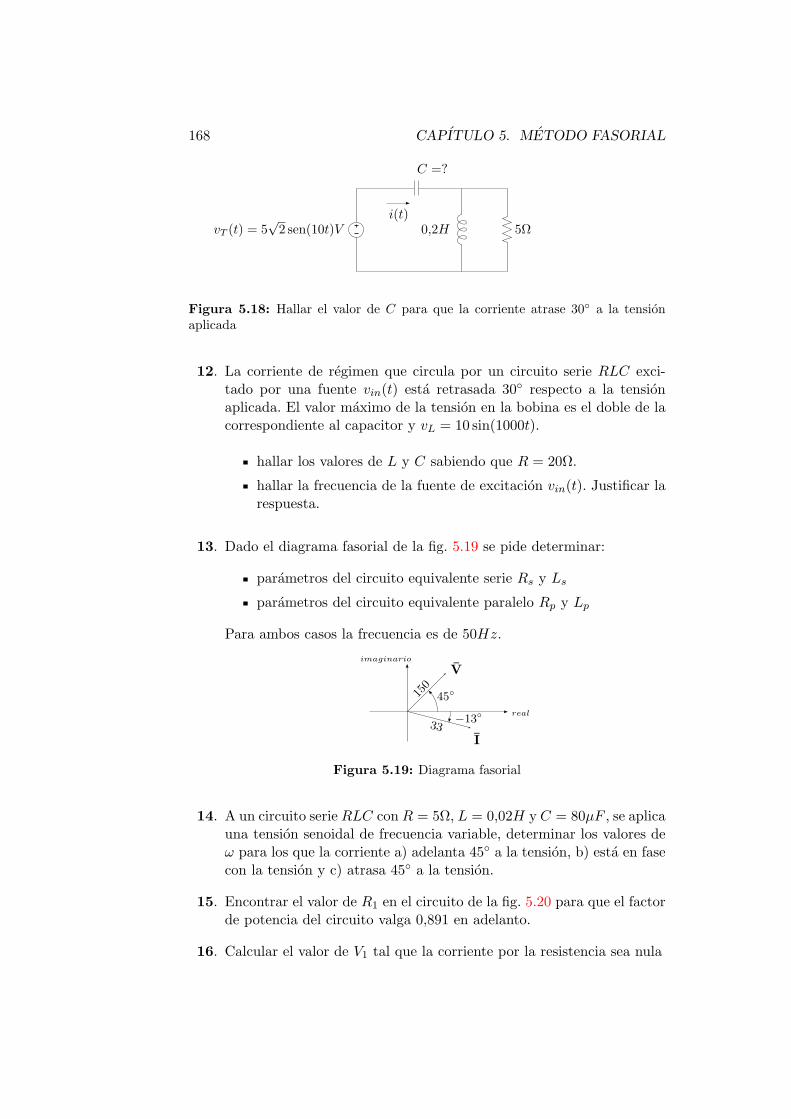
168 CAPITULO 5. METODO FASORIAL
5Ω0,2H
C =?
i(t)vT (t) = 5
√2 sen(10t)V
Figura 5.18: Hallar el valor de C para que la corriente atrase 30 a la tensionaplicada
12. La corriente de regimen que circula por un circuito serie RLC exci-tado por una fuente vin(t) esta retrasada 30 respecto a la tensionaplicada. El valor maximo de la tension en la bobina es el doble de lacorrespondiente al capacitor y vL = 10 sin(1000t).
hallar los valores de L y C sabiendo que R = 20Ω.
hallar la frecuencia de la fuente de excitacion vin(t). Justificar larespuesta.
13. Dado el diagrama fasorial de la fig. 5.19 se pide determinar:
parametros del circuito equivalente serie Rs y Ls
parametros del circuito equivalente paralelo Rp y Lp
Para ambos casos la frecuencia es de 50Hz.
real
imaginario
V
I
45
−13
150
33
Figura 5.19: Diagrama fasorial
14. A un circuito serie RLC con R = 5Ω, L = 0,02H y C = 80µF , se aplicauna tension senoidal de frecuencia variable, determinar los valores deω para los que la corriente a) adelanta 45 a la tension, b) esta en fasecon la tension y c) atrasa 45 a la tension.
15. Encontrar el valor de R1 en el circuito de la fig. 5.20 para que el factorde potencia del circuito valga 0,891 en adelanto.
16. Calcular el valor de V1 tal que la corriente por la resistencia sea nula

5.6. SENALES POLIARMONICAS 169
R2 = 4ΩR1 =?
C = −j5Ω
Figura 5.20
V1 106 10IR
−2j
22j
5j
Figura 5.21: Calculo simbolico
1206 10
10
5
−j10j12
A
B
Figura 5.22: Tension en regimen permanente sinusoidal
17. Encontrar la tension VAB e indicarla en el diagrama fasorial de ten-siones del circuito de la figura 5.22
18. En el circuito de la fig. 5.23 la corriente I atrasa a la tension V unangulo ϕ. Bajo esta condicion
a. Dibujar el diagrama fasorial completo de tensiones y corrientes
b. Indicar en el diagrama fasorial de tensiones la tension VAB
19. Para el circuito de la figura 5.24 se pide construir el diagrama fasorialcompleto de tensiones y corrientes para C = 1,66mF y C = 5mF
20. Un sistema capacitivo alimentado con excitacion senoidal disipa unapotencia P = 7200W con un factor de potencia fp = 0, 334. Se sabeque los valores de resistencia y capacidad del sistema son R = 2Ω yC = 470µF respectivamente. Se pide calcular

170 CAPITULO 5. METODO FASORIAL
VI
R1
R2
L1
L2 C
A
B
C
Figura 5.23
16Ω
2H
C√2 sen(6t)
Figura 5.24: Circuito RLC con fuente de corriente
a. la frecuencia de la fuente de alimentacion senoidal
b. la tension eficaz de la fuente y la caıda de cada elemento
c. la corriente eficaz
d. construir diagrama fasorial de tensiones y corriente, considerandola tension de alimentacion con fase 0
21. Sobre un circuito RLC serie se miden las siguientes tensiones VT =220V , VC = 220V y VL = 438,2V . Sabiendo que la componente resis-tiva del circuito es de 10Ω, se pide
a. calcular el cosϕ, el fasor de corriente I y construir el diagramafasorial de tensiones
b. construir el triangulo de potencias
c. si se modifica el valor de C para que el cosϕ sea de 0,95 en atraso,como se modifica el triangulo de potencias?
22. Sean dos impedancias en serie tal que ZT = 1 + j2Ω (fig. 5.25).Sabiendo que las tensiones son v2(t) = 31,6 cos(ωt + 73,4) y vT =20 cos(ωt− 35), se pide
a. calcular el fasor V1
b. deducir que medira un voltımetro colocado en los bornes de Z1,Z2 y ZT
c. construir el diagrama fasorial de tensiones
d. construir el triangulo de potencias

5.6. SENALES POLIARMONICAS 171
Z1
Z2
v1(t)v2(t)vT (t)
Figura 5.25: Impedancias en serie
23. Mediante la conexion de capacitores en paralelo se modifica el f.p.desde 0,65 en retraso a 0,90 en retraso de una carga de 300W conectadaa la distribucion domiciliaria (220V − 50Hz). Se pide
a. calcular la capacidad C de los capacitores agregados en paralelo
b. determinar el porcentaje de disminucion de la corriente despuesde la correccion
c. construir los triangulos de potencia antes y despues de la correc-cion
24. Se quiere encontrar las constantes R y L de una bobina real. Paraesto se utiliza una resistencia patron de RP = 10Ω. Al conectar laresistencia patron en serie con la bobina real y alimentar el circuito semiden las siguientes tensiones: VRpatron = 20V en la resistencia patron,Vbobina = 22,4V en los bornes de la bobina y VT = 36V la tension dealimentacion. Si la frecuencia de alimentacion es de f = 50Hz, calcularR y L del inductor real.
25. La corriente que circula por un circuito serie RLC esta retrasada 30
con respecto a la tension aplicada. El valor maximo de la tension enla bobina es el doble de la corresponiente al capacitor y vale vL(t) =10 sen(100t)V . Se pide hallar los valores de L y C sabiendo que R =20Ω
26. En el circuito de la figura 5.26 se pide:
a. La corriente total IT, y las corriente en las impedancias ZA y ZB
b. La potencia activa en cada impedancia y la potencia activa totalcon su verificacion
c. El factor de potencia del circuito
d. Diagrama fasorial completo.
27. Dado el circuito de la fig. 5.27 se pide
a. encontrar iT (t)
b. construir el diagrama fasorial completo de tensiones (VR1, VC,
VL, VR2, VT ) y corrientes (IT, IL, IR2
)

172 CAPITULO 5. METODO FASORIAL
V = 1206 0ZA = 9,66 − 51,3
= 6− j7,5ZB = 8,936 26,6
= 8 + j4
ZC = 6,76 65,3
= 2,8 + j6,1
Figura 5.26: Calcular corriente y potencia activa de cada elemento
c. determinar la diferencia de fase entre VT y IT
d. construir el triangulo de potencias
100√2 sin(1000t+ 30) iT
R1 = 150Ω
R2 = 270ΩL = 200mH
C = 4µF
Figura 5.27
28. El diagrama fasorial de la figura 5.28 se obtiene al aplicar una tensionsinusoidal v(t) = 15 cos(10t) a un cicruito serie, los valores son |VR| =8V , |VL| = 1,03V y |VC | = 8V . Determinar a partir de este:
el valor de los elementos pasivos que conforman el circuito
el cosϕ del sistema
el triangulo de potencias utilizando el metodo de potencia comple-ja y comprobando con el calculo de la potencia en cada elemento.
8V 8V
1,03V
I = 1A
Figura 5.28: Diagrama fasorial de tensiones
29. A que se llama factor de potencia? Como se corrige? Demuestre quela capacidad en paralelo necesaria para corregir el factor de potenciade un sistema viene dada por
C =P (tanϕ0 − tanϕf )
V 2ω(5.74)
con P la potencia activa y V la tension de alimentacion del sistema, ycosϕ0 y cosϕf los factores de potencia inicial y final respectivamente.

5.6. SENALES POLIARMONICAS 173
30. Si la corriente que atraviesa un capacitor de C = 2,5mF en el dominiode s es
IC(s) =5
s+ 200
se pide
a. encontrar VC(s) si vC(0) = 10V
b. decir cual es el τ del circuito
c. calcular y graficar iC(t) y vC(t)
31. En el circuito de la fig. 5.29 se dan valores arbitrarios a R2 y jXL. Sepide
a. demostrar analıticamente que para cualquier par de valores de R2
y jXL el valor eficaz de la diferencia de potencial VAB es siempre50V
b. construir el diagrama fasorial de tensiones y corrientes para unpar cualquiera de valores de R2 y jXL
c. senalar en el diagrama fasorial el fasor VAB
1006 0
10Ω
10Ω R2
jXL
A B
Figura 5.29
32. Para el circuito de la figura 5.30 se pide
a. calcular la tension VAB
b. construir el diagrama fasorial completo (tensiones y corrientes)
c. indicar en el diagrama fasorial la tension VAB
d. construir el triangulo de potencias
e. calcular la potencia en los elementos resistivos
33. El circuito de la fig. 5.31 es el equivalente de un motor asıncrono enregimen permanente nominal. Ze y Zr representan respectivamentelas impedancias del estator y rotor. La resistencia Rc representa lasperdidas en el hierro y XM la reactancia de magnetizacion. En es-tas condiciones de funcionamiento el motor consume una potencia de25KW con un cosϕ = 0,77. Se pide

174 CAPITULO 5. METODO FASORIAL
10 + j10I
I1 I2
2
4
j2
j4
−j4A
B
Figura 5.30: Calcular VAB
a. Determinar la potencia de perdida en el hierro (potencia en Rc)
b. Calcular los valors de Rc y XM
c. Calcular la potencia reactiva necesaria para llevar el f.p. a 0,9 enatraso.
RcjXM
Ze = 0,5 + j0,2
Zr = 3 + j3,7220V, 50Hz
Figura 5.31: Potencia y factor de potencia

5.6. SENALES POLIARMONICAS 175
Soluciones
Ejercicio 1 Solucion
El fasor de tension es
VC =10√
2(14 + j)
VC = 6,86 6 − 75,96
y la respuesta en el dominio del tiempo
vC(t) = 9,7 cos(4t− 75,96)
Ejercicio 2 Solucion
El fasor de corriente es
IT =1000
√2(1 + j100 · 0, 01 + 1
j100·5×10−6
)A
IT = 353× 10−3 6 89, 97A
y la respuesta en el dominio del tiempo
iT (t) = 0, 5 cos(ωt+ 89, 97)A
Ejercicio 3 Resolucion Numerica
Los fasores de corriente de cada rama son
I1 = 106 45A
I2 = 106 −75AI3 = 106 −195A
segun LKC, en el nudo la suma sera
IT − I1 − I2 − I3 = 0A
IT = 106 45 + 106 −75 + 106 −195
Para sumar estos fasores, los escribimos en su forma binomial
IT = (7, 0711 + j7, 0711) + (2, 5882− j9,6593) + (−9, 6593 + j2, 5882)
IT = 0A

176 CAPITULO 5. METODO FASORIAL
El resultado obtenido es logico, pues si se observan estas corrientestienen todas la misma amplitud y estan defasadas 120 entre sı. Es de-cir que se trata de tres fasores simetricos, que se anulan mutuamente(vease el diagrama fasorial de la fig. 5.32). Este tipo de corrientes seobtiene por ejemplo al excitar un sistema trifasico de cargas equilibra-das con una senal simetrica.
I1
I2
I3
45
−95
−195
Im
Re
Figura 5.32: Diagrama fasorial de corrientes del ejercicio 3
Ejercicio 9 Planteo
Para encontrar la corriente total IT buscamos primero la impedanciatotal equivalente del circuito.
ZT = R1 + jωL+
(1
1R2
+ jωC
)= R1 + jωL+
(R2
1jωC
R2 +1
jωC
)
entonces el fasor corriente sera
IT =VT
ZT
Con la corriente total se puede obtener cada una de las caıdas detension en los elementos
VR1= R1 IT
VL = jωL IT
Vparalelo = VR2= VC =
(R2
1jωC
R2 +1
jωC
)IT

5.6. SENALES POLIARMONICAS 177
Con la tension del paralelo se obtienen las corrientes de la rama a y b
Ia =Vparalelo
R2
Ib =Vparalelo
1jωC
Las potencias activa, reactiva y aparente seran
P = |VT| · |IT| · cos(ϕ)Q = |VT| · |IT| · sen(ϕ)S = |VT| · |IT|
siendo ϕ angulo de desfasaje entre la tension y la corriente, igual alargumento de la impedancia total equivalente ZT .
Resolucion numerica
El fasor eficaz de tension de la alimentacion es
VT =50√26 70 = 35,36 6 70V
y con ω = 200 rads
la impedancia total equivalente
ZT = 150 + j200 · 500x10−3 +
(1
1100 + j200 · 60x10−6
)
ZT = 150 + j100 + (40,98− j49,18)
ZT = 190,98 + j50,82 = 197,636 14,9Ω
entonces el fasor corriente es
IT =35,366 70
197,636 14,9A
IT = 0,178926 55,1A
Las tensiones en R1, en L y en el paralelo son
VR1= 150 · 0,178926 55,1 = 26,846 55,1V
VL = 1006 90 · 0,178926 55,1 = 17,89 6 145,1V
Vparalelo = 64,026 − 50,19 · 0,178926 55,1 = 11,45 6 4,91V
y finalmente las corrientes en las ramas a y b son
Ia =11,456 4,91
100= 0,11456 4,91A
Ib =11,456 4,91
83,336 − 90= 0,13756 94,91A

178 CAPITULO 5. METODO FASORIAL
Vparalelo
VL
VR1 VT
70
55,1
145,1
Im
Re
Figura 5.33: Diagrama fasorial de tensiones del ejercicio 9
IT
Ia
Ib
55,194,91
Im
Re
Figura 5.34: Diagrama fasorial de corrientes del ejercicio 9
En las figuras 5.33 y 5.34 se trazan los diagramas fasoriales de tensiony corriente respectivamente.
Las potencias del circuito son
P = 35,36 · 0,17892 · cos(70 − 55,1) = 6,1139W
Q = 35,36 · 0,17892 · sen(70 − 55,1) = 1,6268VAR
S = 35,36 · 0,17892 = 6,33VA
El triangulo de potencias es el de la figura 5.35

5.6. SENALES POLIARMONICAS 179
P = 6,1139W
Q = 1,6268VARS = 6,33VA
14,9
Figura 5.35: Triangulo de potencias del problema 9
Ejercicio 20 Planteo
A partir del fp del circuito se calcula el argumento ϕ de la impedanciaZT del circuito y de esta la reactancia capacitiva XC , sabiendo que
ϕ = cos−1(fp) (5.75)
XC
R= tg(ϕ)⇒ XC = R tg(ϕ) (5.76)
la frecuencia angular ω se obtiene de la relacion entre XC y C, y deaquı la frecuencia f
XC =1
ωC=
1
2πf C⇒ f =
1
2πXC C(5.77)
El valor eficaz de la corriente y la resistencia determinan la potenciaactiva
P = I2ef R (5.78)
por lo tanto
Ief =
√P
R(5.79)
El modulo del fasor tension total aplicado Vef puede calcularse a partirde los modulos de los fasores de tension del capacitor y la resistencia,
Vef =√V 2R + V 2
C =√(RIef )2 + (XC Ief )2 (5.80)
Para construir el diagrama fasorial se deben calcular los fasores detension y corriente total, el fasor IT sera
IT = Ief 6 − ϕ (5.81)
y el de tension
VT = Vef6 0 (5.82)
Las tensiones en los elementos seran
VR = R · IT (5.83)
VC = −jXC · IT (5.84)

180 CAPITULO 5. METODO FASORIAL
Resolucion numerica
Reemplazando los valores de resistencia, capacidad y factor de poten-cia segun los datos
ϕ = cos−1(0,334) = −70,5 (5.85)
XC = 2 · tg(−70,5) = 5,64Ω (5.86)
observese que de los dos valores de angulo que se obtienen del calculodel cos−1 (uno positivo y otro negativo) se toma el angulo negativopor tratarse de una impedancia capacitiva.
Para la frecuencia
f =1
2π · 5,64 · 470× 10−6= 60Hz (5.87)
La corriente eficaz sera
Ief =
√7200
2= 60A (5.88)
y la tension eficaz
Vef =√(2 60)2 + (5,64 60)2 = 359,26V (5.89)
Por ultimo se calculan los fasores para construir el diagrama fasorialde la fig. 5.36
IT = 606 70,5A (5.90)
VT = 359,266 0V (5.91)
VR = 2 · 606 70, 5 = 1206 70,5V (5.92)
VC = −j5,64 · 606 70,5 = 338,46 − 19,5V (5.93)
Ejercicio 21 Solucion
a. La solucion se obtiene de aplicar la LKV al circuito serie
VT = VR + VL + VC (5.94)
pero como se tienen solo los modulos de las caıdas de tensioncomo dato, entonces se debe resolver trigonometricamente. Comose sabe que las caıdas en los elementos reactivos estan desfasadas180 entre sı, se puede encontrar el modulo de la caıda de tensionen ambos elementos simplemente por diferencia de sus modulos.Si llamamos a esta tension VX, su modulo sera
VX = VL − VC

5.6. SENALES POLIARMONICAS 181
VC
VR
VT
IT
−19, 5
70, 5
70, 5
Im
Re
Figura 5.36: Diagrama fasorial de tensiones del ejercicio 20
Ademas, se sabe que esta tension en los elementos reactivos tie-ne una diferencia de fase de 90 respecto de la caıda de tensionresistiva, y con la tension total aplicada se forma un triangulorectangulo. Teniendo entonces los modulos de la tension total yde la tension en los elementos reactivos, se obtiene el angulo ϕ
ϕ = sen−1
(VX
VT
)= sen−1
(VL − VC
VT
)
Como no se conoce ningun angulo de fase de los fasores de tension,se puede considerar que la caıda de tension resistiva tiene unafase cero, por lo que tambien tendra fase nula la corriente total,lo que facilita mucho el calculo. Entonces, si VR tiene fase cero,VL como VC tendran fase 90 y −90 respectivamente, y el fasorVT se obtiene con la ec. (5.94)
VR = VR 6 0
VL = VL 6 90
VC = VC 6 − 90
La corriente total se obtiene de la caıda de tension en la resistencia
IT =VR
R
b. Para construir el triangulo de potencias se calcula la potenciacompleja S
S = VT I∗T
de donde
P = ℜeSQ = ℑmSS = |S|

182 CAPITULO 5. METODO FASORIAL
c. Considerando nuevamente a la tension en la resistencia con fasecero, segun el nuevo factor de potencia la tension aplicada sera
VT2 = VT 6 ϕ
y la tension en la resistencia
VR2 = VT cos(ϕ)
por ende el fasor corriente
IT2 =VR
R6 0
finalmente la nueva potencia compleja y las potencias activas,reactivas y aparente se obtienen de
S2 = VT2 I∗T2
P2 = ℜeSQ2 = ℑmSS2 = |S2|
Resolucion numerica
El siguiente codigo de octave permite obtener la resolucion numerica deeste problema. Para obtenerlo copiar el codigo en un archivo resolv.my ejecutar en consola $ octave resolv.m
% Para ejecutarlo, desde consola escribir octave archivo.m
% Declaracion de constantes conocidas
R = 10;
mod_V_T = 220;
mod_V_L = 438.2;
mod_V_C = 220;
cos_phi2 = 0.95
% Calculo de phi en radianes.
phi = asin( (mod_V_L - mod_V_C) / mod_V_T );
% Calculo del modulo V_R. Se deja sin ; para que se muestre el valor por pantalla
mod_V_R = mod_V_T * cos( phi )
% Se calculan V_R, V_L, V_C y V_T, considerando a V_R con fase cero
V_R = mod_V_R
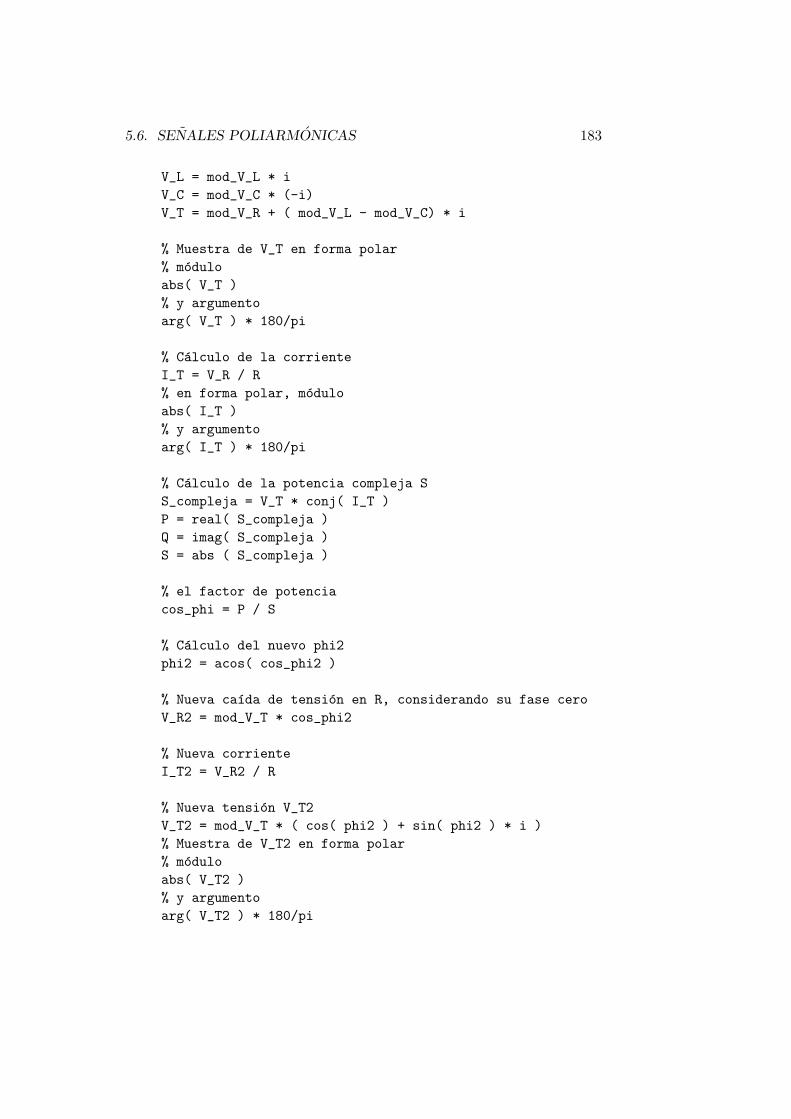
5.6. SENALES POLIARMONICAS 183
V_L = mod_V_L * i
V_C = mod_V_C * (-i)
V_T = mod_V_R + ( mod_V_L - mod_V_C) * i
% Muestra de V_T en forma polar
% modulo
abs( V_T )
% y argumento
arg( V_T ) * 180/pi
% Calculo de la corriente
I_T = V_R / R
% en forma polar, modulo
abs( I_T )
% y argumento
arg( I_T ) * 180/pi
% Calculo de la potencia compleja S
S_compleja = V_T * conj( I_T )
P = real( S_compleja )
Q = imag( S_compleja )
S = abs ( S_compleja )
% el factor de potencia
cos_phi = P / S
% Calculo del nuevo phi2
phi2 = acos( cos_phi2 )
% Nueva caıda de tension en R, considerando su fase cero
V_R2 = mod_V_T * cos_phi2
% Nueva corriente
I_T2 = V_R2 / R
% Nueva tension V_T2
V_T2 = mod_V_T * ( cos( phi2 ) + sin( phi2 ) * i )
% Muestra de V_T2 en forma polar
% modulo
abs( V_T2 )
% y argumento
arg( V_T2 ) * 180/pi

184 CAPITULO 5. METODO FASORIAL
% Nueva potencia compleja, y potencias activa, reactiva y aparente
S_compleja2 = V_T2 * conj( I_T2 )
P2 = real( S_compleja2 )
Q2 = imag( S_compleja2 )
S2 = abs ( S_compleja2 )
Ejercicio 22 Planteo y resolucion numerica
La suma de las tensiones a lo largo de la malla es
vT (t) = v1(t) + v2(t)
VT = V1 + V2
de donde
V1 = VT − V2
V1 = (11,5846− j8,1116)− (6,3836 + j21,4133) = 5,2010− j29,5249V
V1 = 29,98 6 − 80,01V
Las tensiones medidas por un voltımetro a bornes de cada impedanciaseran los modulos de los fasores eficaces
V1 = 29,98V
V2 = 22,35V
VT = 14,14V
Con los fasores obtenidos se construye el diagrama fasorial de la fig.5.37.
Para construir el triangulo de potencias se puede calcular la corrientetotal
IT =VT
ZT
IT =11,5846− j8,1116
1 + j2= −0,92773− j6,25614A
IT = 6,32 6 − 98,43A
de donde
S = VTI∗T
S = (11,5846− j8,1116) · (−0,92773 + j6,25614)
S = 40 + j80

5.6. SENALES POLIARMONICAS 185
V1
V2
VT
−80,01
Im
Re
Figura 5.37: Diagrama fasorial de tensiones del ejercicio 22
Es decir, la potencia activa P = 40W, la potencia reactiva Q = 80VARy la potencia aparente S = 89,44VA. El factor de potencia del sistemaes
cosϕ =P
S= 0,4471
en retraso.
En la fig. 5.38 se construye el triangulo de las potencias.
P = 40W
Q = 80VAR
S = 89,44VA
Figura 5.38: Triangulo de potencias del ejercicio 22

186 CAPITULO 5. METODO FASORIAL

Capıtulo 6
Resolucion sistematica decircuitos
Las transformaciones de Laplace y fasorial vistas en los capıtulos an-teriores permiten llevar las ecuaciones de equilibrio de un circuito en eldominio del tiempo a un dominio (de s o de jω respectivamente) dondelas ecuaciones de equilibrio son puramente algebraicas. A continuacion sedesarrollan dos metodos aplicables a circuitos con ecuaciones de equilibriopuramente algebraicas que permiten encontrar las variables incognitas enforma sistematica.
6.1. Metodo de las corrientes en las mallas
Enunciado
Dado un circuito lineal con n corrientes de malla independientes, la ecua-cion matricial de equilibrio viene dada por
Z11 Z12 . . . Z1n
Z21 Z22 . . . Z2n...
Zn1 Zn2 . . . Znn
I1I2...In
=
V1
V2...Vn
(6.1)
donde los elementos de la diagonal principal son las impedancias propias decada malla y los otros elementos son las llamadas copedancias entre mallas.Las impedancias propias de cada malla se forman sumando los N elementospertenecientes a la malla, para la malla k sera
Zij
∣∣i=j=k
=N∑
n=1
Zkn (6.2)
Las copedancias se forman sumando todas las impedancias compartidas en-tre la malla k y la malla l, es decir todas las impedancias que son atravesadas
187

188 CAPITULO 6. RESOLUCION SISTEMATICA DE CIRCUITOS
por las corrientes Ik e Il. Si las corrientes atraviesan las impedancias com-partidas en sentido contrario, la copedancia se debe multiplicar por −1.
Prueba
Se llama corriente de malla a una corriente ficticia, o corriente de Max-well, que circula por una malla particular del circuito. Para determinar cuan-tas mallas independientes conforman un circuito se debe analizar la topo-logıa del circuito. Una forma practica de encontar este numero es contandola cantidad de cortes mınimos que deben realizarse sobre un circuito paraabrir todas las mallas. El numero de cortes realizados es igual a la cantidadde corrientes de malla independientes que conforman el circuito. Notese queeste numero es unico para un circuito, pero no es unica la forma de elegirlas mallas, es decir que no son unicas las corrientes de malla.
Para mostrar como se obtiene la ecuacion matricial (6.1) vamos a utilizarun ejemplo. Supongamos el circuito de la figura FIG:, representado en eldominio fasorial.
6.2. Metodo de las tensiones en los nudos
Consideremos las tensiones en los nudos principales del circuito de lafigura FIG. Estas tensiones estan referidas al nudo de referencia con la pola-ridad indicada. Si se desarrollan las ecuaciones de equilibrio de las corrientesen cada nudo se obtiene
V1 − VA
ZA
+V1
ZB
+V1 − V2
ZC
= 0 (6.3)
V2 − V1
ZC
+V2
ZD
+V2 − VB
ZE
= 0 (6.4)
Para explicar la constitucion de la ecuacion (6.3) veamos la figura FIGdonde se reproduce en detalle las referencias de las tensiones y corrientesen el nudo 1. Las corrientes que se muestran se eligen arbitrariamente parael desarrollo como entrantes o salientes al nudo, en este caso al ser todassalientes se tiene
Ia + Ib + Ic = 0
la circulacion de la corriente Ia por la impedancia ZA produce una caıda detension VZA
con la polaridad indicada, de forma que la ecuacion de mallaes
VA + VZA− V1 = 0
VZA= V1 − VA (6.5)

6.2. METODO DE LAS TENSIONES EN LOS NUDOS 189
con lo que
Ia =V1 − VA
ZA
(6.6)
la corriente Ib se obtiene directamente de hacer la tension de nudo sobre laimpedancia ZB, ya que VZB
= V1
Ib =V1
ZB
(6.7)
por ultimo se obtiene la corriente Ic de la misma forma que se obtuvo Ia, esdecir calculando la tension en ZC
V2 − VZC− V1 = 0
VZC= V2 − V1 (6.8)
y luego la corriente es
Ic =V2 − V1
ZC
(6.9)
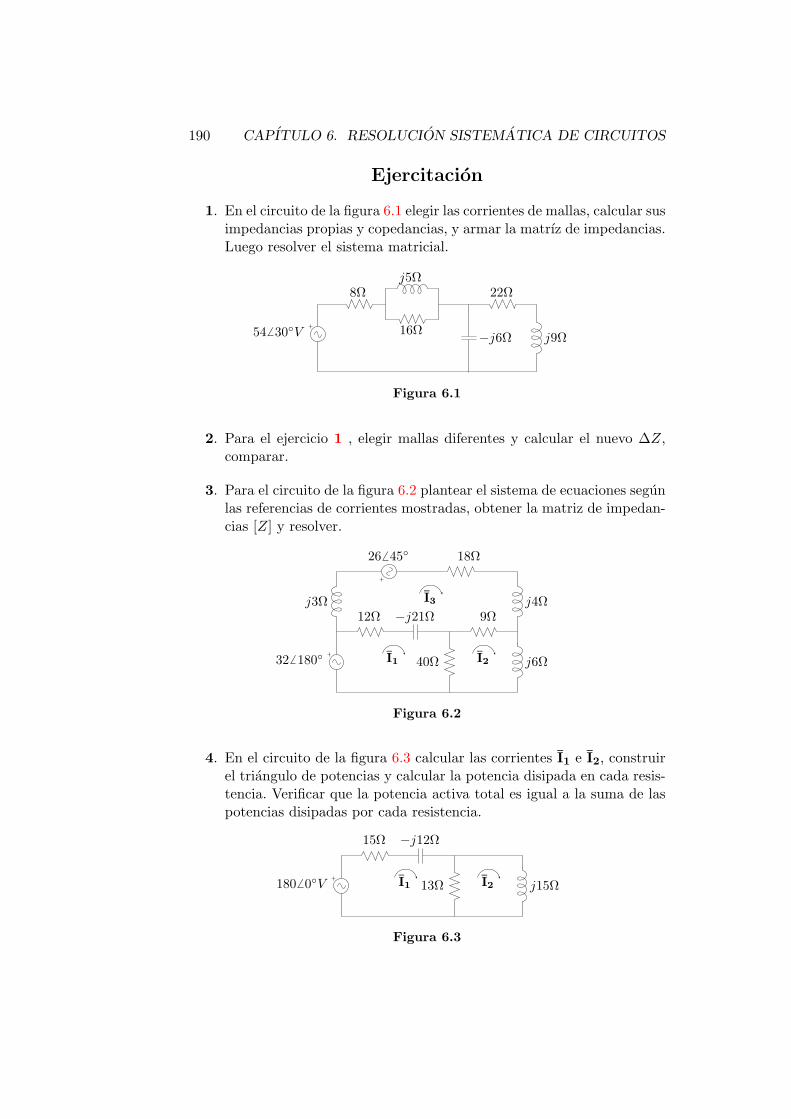
190 CAPITULO 6. RESOLUCION SISTEMATICA DE CIRCUITOS
Ejercitacion
1. En el circuito de la figura 6.1 elegir las corrientes de mallas, calcular susimpedancias propias y copedancias, y armar la matrız de impedancias.Luego resolver el sistema matricial.
8Ω
16Ω
22Ω
−j6Ω
j5Ω
j9Ω546 30V
Figura 6.1
2. Para el ejercicio 1 , elegir mallas diferentes y calcular el nuevo ∆Z,comparar.
3. Para el circuito de la figura 6.2 plantear el sistema de ecuaciones segunlas referencias de corrientes mostradas, obtener la matriz de impedan-cias [Z] y resolver.
12Ω
40Ω
9Ω
18Ω
−j21Ω
j6Ω
j4Ωj3Ω
326 180
266 45
I1 I2
I3
Figura 6.2
4. En el circuito de la figura 6.3 calcular las corrientes I1 e I2, construirel triangulo de potencias y calcular la potencia disipada en cada resis-tencia. Verificar que la potencia activa total es igual a la suma de laspotencias disipadas por cada resistencia.
15Ω
13ΩI1 I2
−j12Ω
j15Ω1806 0V
Figura 6.3

6.2. METODO DE LAS TENSIONES EN LOS NUDOS 191
5. Dado el circuito de la figura 6.4, determinar el valor de la fuente EB
para que reduzca a cero la corriente en esa rama.
5Ω
3Ω −j2Ω
j5Ω j2Ω
EA = 106 0V EB
Figura 6.4
6. La figura 6.5 muestra un esquema trifasico de conexion tipo estre-lla. Encontrar por el metodo de las corrientes de mallas las llamadascorrientes de lınea IA, IB e IC.
IA
IB
IC
3− j6Ω
3 + j5Ω 3 + j9Ω
406 30
406 150
406 270
Figura 6.5
7. Del circuito de la figura 6.6 determinar la corriente de rama Ix segunse indica. Resolver aplicando el metodo de los nudos tomando el nudo4 como referencia. Dato adicional: ∆Y = 0,0501
Ix
R1 = 8Ω
R2 = 10Ω
R3 = 7Ω
R4 = 12Ω
R5 = 5Ω
R6 = 4Ω
100V
140V
60V
80V
V1 V2
V3
V4
Figura 6.6: Determinar Ix
8. Aplicando el metodo de las tensiones en los nudos, calcular la tensioneficaz del generador de la figura 6.7 para disipar 75W en la resistencia.
9. Calcular la tension de salida Vout del circuito de la figura 6.8.
10. El sistema representado por el esquema de la figura 6.9 debe ser con-figurado mediante la resistencia de carga Rx para que la tension y

192 CAPITULO 6. RESOLUCION SISTEMATICA DE CIRCUITOS
3Ω−j5Ωj4Ω
j4Ω|V| =?
Figura 6.7
5Ω
10Ωj5Ωj10Ω
506 0Vout
Figura 6.8
corriente de entrada esten en fase. Calcular Rx utilizando impedanciade entrada y la tension VAB utilizando impedancia de transferencia.
23Ω
−j2Ω −j2, 5Ω
j3Ω
j7Ω
Rx
126 15
A
B
Figura 6.9
11. Calcular para el sistema del ejercicio 10 las potencias en cada elementoy construir el triangulo de potencias total. Verificar que la potenciaactiva P es igual a la potencia aparente S.
12. Para el circuito de la figura 6.10 calcular la tension de salida Vout si
a. el generador de tension vale Vin = 0
b. el generador de tension vale Vin = 366 30
3Ω −j5Ω
j4Ω 12ΩVin 16 0 Vout
Figura 6.10
13. Calcular la corriente de salida Io del circuito de la figura 6.11 utilizandoel metodo de los nudos.

6.2. METODO DE LAS TENSIONES EN LOS NUDOS 193
26 0
5Ω
10Ω
j40Ω
j5Ω
−j10Ω
506 0
Io
Figura 6.11: Determinar Io
14. Dado el circuito de la figura 6.12, se pide determinar la tension VAB
con los datos indicados.
56 30A 5Ω5Ω
5Ω
j10Ω j5Ω
256 90V
A
B
Figura 6.12: Determinar VAB
15. Considere una red de tres mallas independientes tal queZ11 Z12 Z13
Z21 Z22 Z23
Z31 Z32 Z33
I1I2I3
=
V1
V2
V3
(6.10)
a. defina impedancia de entrada e impedancia de transferencia.
b. efectue los desarrollos necesarios para su determinacion.
16. La resistencia de 5Ω consume una potencia de 520W y el circuito total2800VA de potencia aparente con un factor de potencia en adelanto de0,86. Hallar Z
Z =?
5Ω
j8ΩV
Figura 6.13: Calcular la impedancia Z
17. Aplicando el metodo de las corrientes de mallas encontrar el valorde capacidad C que produce un atraso de corriente de 30 respecto

194 CAPITULO 6. RESOLUCION SISTEMATICA DE CIRCUITOS
de la tension aplicada en el circuito de la figura 1. Hallar el fasorcorriente total y construir el diagrama fasorial de tensiones y corrientescompleto. Calcular la potencia disipada por la resistencia y la potenciacompleja en el generador.
18. En el circuito de la fig. 6.14 se pide, aplicando el metodo de corrientesde malla
a. Obtener las matrices de impedancia Z y de las tensiones de mallaV para el planteo del metodo ZI = V
b. Justificar el signo de las copedancias de la matriz Z
10 + j10
10− j10
I1
I2
I3
10
10
10
j5 j5
−j5
Figura 6.14: Corrientes de malla
19. En el circuito de la fig. 6.15 se pide, aplicando el metodo de tensionesen los nudos
a. Obtener la matriz de admitancia Y y el vector de corrientes Ipara el planteo del metodo YV = I
b. Justificar el signo de las coadmitancias de la matriz Y
10 + j10
10− j10
V1
V2V3
4
2
2
2
j1 j1
−j1
Figura 6.15: Tensiones en los nudos
20. En el circuito de la fig. 6.16 se pide, aplicando el metodo de tensiones enlos nudos, obtener la matriz de admitancia Y y el vector de corrientesI segun las referencias.

6.2. METODO DE LAS TENSIONES EN LOS NUDOS 195
10206 30
V1
V2
V3
22
1j20
j5−j5
−j20
Figura 6.16: Tensiones en los nudos
Soluciones
Ejercicio 3 Solucion
I1 = −3, 23 + j0, 43Ω = 3, 256 172, 32, I2 = −2, 93 + j0, 86Ω =3, 056 163, 60, I3 = −2, 2 + j0, 81Ω = 2, 346 159, 76.
Ejercicio 4 Solucion
I1 = 7, 56 + j1, 88Ω = 7, 796 13, 94, I2 = 4, 15 − j2, 94Ω = 5, 106 −35, 15
Ejercicio 5 Solucion
EB = −4V
Ejercicio 7 Solucion
Ix = 5,15A
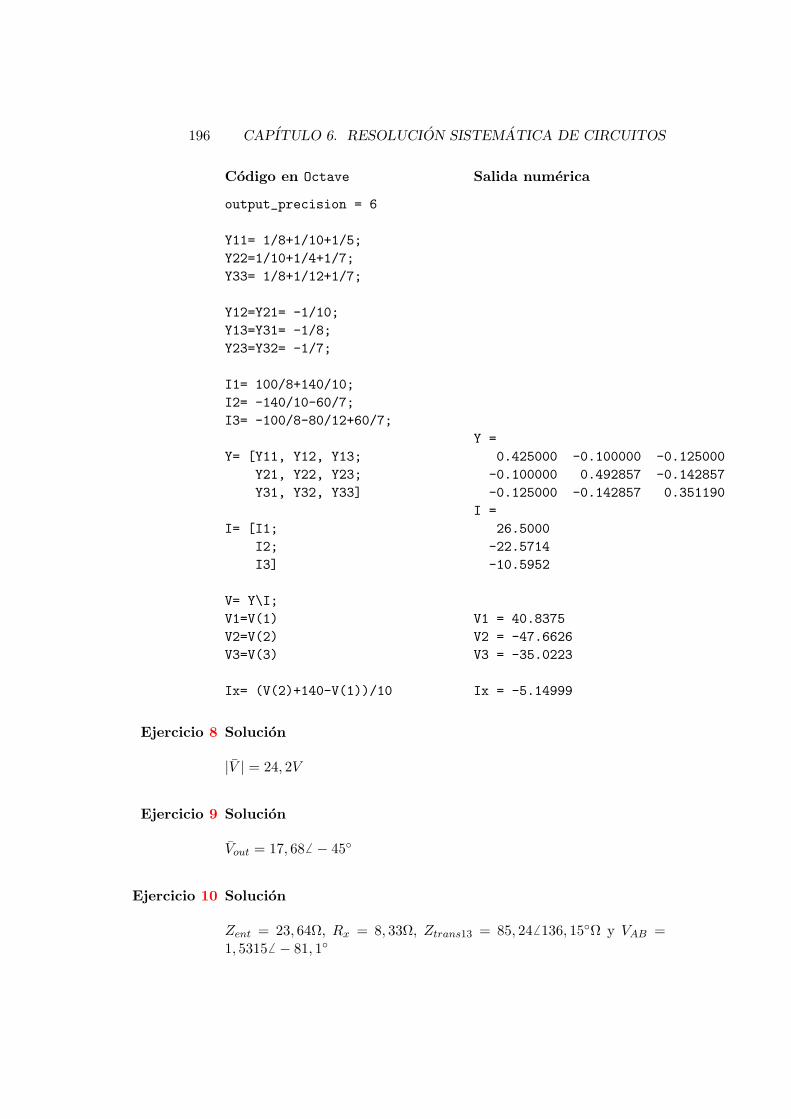
196 CAPITULO 6. RESOLUCION SISTEMATICA DE CIRCUITOS
Codigo en Octave
output_precision = 6
Y11= 1/8+1/10+1/5;
Y22=1/10+1/4+1/7;
Y33= 1/8+1/12+1/7;
Y12=Y21= -1/10;
Y13=Y31= -1/8;
Y23=Y32= -1/7;
I1= 100/8+140/10;
I2= -140/10-60/7;
I3= -100/8-80/12+60/7;
Y= [Y11, Y12, Y13;
Y21, Y22, Y23;
Y31, Y32, Y33]
I= [I1;
I2;
I3]
V= Y\I;
V1=V(1)
V2=V(2)
V3=V(3)
Ix= (V(2)+140-V(1))/10
Salida numerica
Y =
0.425000 -0.100000 -0.125000
-0.100000 0.492857 -0.142857
-0.125000 -0.142857 0.351190
I =
26.5000
-22.5714
-10.5952
V1 = 40.8375
V2 = -47.6626
V3 = -35.0223
Ix = -5.14999
Ejercicio 8 Solucion
|V | = 24, 2V
Ejercicio 9 Solucion
Vout = 17, 686 − 45
Ejercicio 10 Solucion
Zent = 23, 64Ω, Rx = 8, 33Ω, Ztrans13 = 85, 246 136, 15Ω y VAB =1, 53156 − 81, 1

6.2. METODO DE LAS TENSIONES EN LOS NUDOS 197
Ejercicio 12 Solucion
1. Vout = 2,5716 90
2. Vout = 33,1066 117,78
Salida numerica generada por octave
Y =
0.3333 + 0.2000i -0.0000 - 0.2000i
-0.0000 - 0.2000i 0.0833 - 0.0500i
I =
11.3920 + 6.0000i
0.0000 + 0.0000i
V =
16.06 - 0.89i
-15.43 + 29.29i
Ejercicio 13 Solucion
Io = 0, 88− j1, 34A = 1, 66 − 56, 7A

198 CAPITULO 6. RESOLUCION SISTEMATICA DE CIRCUITOS

Capıtulo 7
Teoremas circuitales
7.1. Teorema de Thevenin
Un circuito lineal activo cualquiera con terminales de salida A−B puedesustituirse por una fuente de tension VTh en serie con una impedancia ZTh,donde el valor de la fuente VTh es la tension a circuito abierto entre losterminales A − B y la impedancia ZTh es igual al cociente entre la tensionVTh y la corriente de corto circuito Icc de los terminales A−B. Para calcularel valor de la fuente VTh, llamada tension de Thevenin, se calcula la tensiona circuito abierto entre los terminales A y B, y para calcular la corriente Iccse unen los terminales A− B y se calcula la corriente que circula por ellos.Luego la impedancia ZTh llamada impedancia de Thevenin sera
ZTh =VTh
Icc(7.1)
En la figura 7.1 se ve esta equivalencia esquematicamente.
VABVABSLA VTh
ZTh AA
BB
≡
Figura 7.1: Equivalente de Thevenin
Para mostrar esta equivalencia supongamos un circuito activo con unaimpedancia Zl entre los terminales A−B como el de la figura 7.2. LlamemosIl a la corriente que circula por Zl, y VAB(Il) a la tension entre los terminalesA−B, enfatizando su dependencia de la corriente Il. Si se conecta una fuenteVx de polaridad opuesta a la tension VAB(Il) como en la figura 7.3 y se varıala tension de esta fuente hasta que la corriente por la impedancia se anuletendremos
199

200 CAPITULO 7. TEOREMAS CIRCUITALES
VABSLA Il
ZlA
B
Figura 7.2: Circuito activo de terminales A−B
VAB(0)− Vx = 0 (7.2)
ya que la tension que cae en Zl es nula. Como la corriente total es cero, latension que aparece entre los terminales A−B es la tension VAB a circuitoabierto. Es decir que esta fuente de prueba Vx que anula la corriente tieneel valor de la tension VAB a circuito abierto, Vx = VAB(0).
VABSLA Vx
Il
ZlA
B
Figura 7.3: Fuente de prueba Vx de valor igual a la tension VAB a circuito abierto
Si en estas condiciones analizamos el circuito por superposicion, tendre-mos lo siguiente: llamemos Il1 e Il2 a las corrientes que resultan de pasivar lafuente de prueba Vx y todas las demas fuentes, respectivamente, tal como seindica en la figura 7.4a y 7.4b. La corriente Il2 del circuito 7.4b, que resultade pasivar todas las demas fuentes menos Vx, viene dada por
Il2 =Vx
Zl + Zo(7.3)
donde Zo es la impedancia del circuito pasivado visto desde los terminalesA−B. Luego, como Il1 − Il2 = 0, Il1 = Il2 .
VABSLA Il1
ZlA
B
(a) Fuente de prueba pasi-vada
VABSLP Vx
Il2
ZlA
B
(b) Todas las fuentes pasivadasmenos la de prueba
Figura 7.4: Resolucion aplicando superposicion
Pero al pasivar Vx la corriente Il1 es igual a la que circulaba antes decolocar la fuente de prueba, es decir la corriente por Zl de la figura 7.2.

7.2. TEOREMA DE SUSTITUCION, O TEOREMA DE MILLER 201
Por lo tanto podemos utilizar el circuito equivalente de la figura 7.4b paracalcular la corriente Il1
Il1 = Il2 =Vx
Zl + Zo(7.4)
donde la fuente de pruebas Vx es la fuente de Thevenin y la impedancia Zo
es la impedancia de Thevenin.
Finalmente, haciendo tender Zl → 0 podemos observar dos cosas: pri-mero que la corriente Il1 de la figura 7.4a es la corriente de corto circuitode los terminales A− B, y segundo que la impedancia Zo es la impedanciade salida del circuito de la figura 7.4b definida como el cociente entre latension y corriente de salida con las demas fuentes pasivadas. Combinandoambas observaciones tenemos que la impedancia de Thevenin es igual a laimpedancia de salida del circuito de bornes A−B y viene dada por
ZTh =VABcircutio abierto
Ilcorto circuito
(7.5)
7.2. Teorema de sustitucion, o teorema de Miller
Una rama cualquiera por la cual circula una corriente I y cae una tensionV , puede ser reemplazada por cualquier otra rama que contenga elementosactivos, pasivos o una combinacion de ambos, siempre y cuando circule porella la misma corriente I y tenga a sus bornes la misma tension V .
La demostracion de este teorema es directa y se basa en la ley de Kir-chhoff de las tensiones. La suma algebraica de tensiones en una malla no semodifica si se suma y resta un generador ideal de igual tension V , si los gene-radores incorporados se conectan ambos en la misma rama tampoco se veranafectadas las corrientes del circuito, en estas condiciones todos los elementosde la rama que provocan la caıda de tension V pueden ser eliminados de lamalla junto con el generador incorporado en forma de subida de tension devalor V sin que se modifiquen las corrientes del circuito, quedando la ramaen cuestion formada solamente por el generador incorporado en forma decaıda de tension de valor V .
7.3. Teorema de compensacion
Como una aplicacion muy comun del teorema de sustitucion surge esteteorema de compensacion. Se trata del caso de un circuito que contiene unaimpedancia variable como carga, donde el calculo de la variacion de corrienteque provoca la variacion de esta impedandancia es de interes. Medianteeste teorema el calculo puede hacerse sin necesidad de recalcular el circuitocompleto.

202 CAPITULO 7. TEOREMAS CIRCUITALES
Sea una impedancia Z variable en torno a un delta, si se reemplazala variacion de esta impedancia por una fuente de tension de forma quecompense la variacion de tension producida, la corriente circulante por larama seguira valiendo lo mismo que antes de la variacion de impedancia.Llamemos δZ a la variacion de impedancia, I a la corriente circulante paraδZ = 0 y δI a la variacion de corriente provocada por δZ, entonces la fuentede compensacion debera valer Vs = I (δZ). Si ahora analizamos el circuitoutilizando el teorema de superposicion vemos que al pasivar la fuente decompensacion Vs la corriente sera I+δI y al pasivar todas las demas fuentesdel circuito excepto la de compensacion la corriente sera −δI, de forma queal actuar en conjunto con las otras fuentes la corriente total es I.
Es decir que la fuente de compensacion actuando con todas las demasfuentes pasivadas nos permite calcular la variacion de corriente provocadapor la variacion de la impedancia Z
δI =−Vs
Z + δZ + Zo=
−IδZZ + δZ + Zo
(7.6)
donde Zo es la impedancia de salida del circuito visto desde los bornes deZ.
7.4. Teorema de reciprocidad
En un circuito lineal con una sola fuente la relacion entre la excitacion yla respuesta se mantienen al intercambiar las posiciones dentro del circuito dela excitacion por la respuesta. Para demostrarlo podemos recurrir al metodode las tensiones en una malla.
Sea Vi la fuente de tension en la rama i, que produce una corriente Ijcomo respuesta en la rama j, la relacion entre ambas viene dada por laimpedancia de transferencia Zij de tal forma que:
Vi = Zij Ij =∆Z
∆ijIj ⇒ Ij =
∆ij
∆Z
Vi (7.7)
si ahora trasladamos esta fuente a la rama j, la corriente que produce en larama i segun la impedancia de transferencia Zji sera:
Vj = Zji Ii =∆Z
∆jiIi ⇒ Ii =
∆ji
∆Z
Vj (7.8)
si comparamos las ecuaciones de las corrientes Ii e Ij vemos que solo sediferencian por el determinante sustituto de las respectivas impedancias detransferencia, ∆ij y ∆ji. Pero en una matriz simetrica, como es el caso de lamatriz de impedancias, los determinantes de la fila y columna intercambiada

7.5. TEOREMA DE MILLMAN 203
son iguales 1, es decir ∆ij = ∆ji, y por ende la corriente generada en la ramai sera igual a la corriente que antes se genero en la rama j, Ii = Ij
Las corrientes desarrolladas en las otras ramas del circuito para unoy otro caso no son necesarimente iguales, puesto que las impedancias detransferencias entre ramas diferentes no se mantendran iguales.
El mismo teorema de reciprocidad puede aplicarse en circuitos que con-tengan una sola fuente de corriente.
7.5. Teorema de Millman
El teorema de Millman establece que varios generadores reales de ten-sion a circuito abiero VG e impedancia interna Z conectados en paralelopueden ser remplazados por uno equivalente de tension VM en serie con unaimpedancia ZM , con
VM =
∑Ni=1
Vi
Zi∑Ni=0 Z
−1i
(7.9)
ZM =
(N∑
i=1
Z−1i
)−1
(7.10)
La demostracion de este teorema puede hacerse facilmente representandocada generador real por su equivalente de Norton y despues de agrupar todaslas impedancias y generadores reemplazarlo por su equivalente de Thevenincomo se muestra en la fig. 7.5.
Si la tension a circuito abierto del generador i -esimo es VGiy su impe-
dancia interna Zi entonces la corriente de Norton sera
INi=
VGi
Zi(7.11)
luego todas las corriente de Norton en paralelo daran como resultado unacorriente total equivalente
INeq =
N∑INi
(7.12)
y la impedancia sera el equivalente paralelo de las anteriores
ZNeq =1
∑N Z−1i
(7.13)
1sea Z =
∣
∣
∣
∣
∣
∣
d11 a c
a d22 b
c b d33
∣
∣
∣
∣
∣
∣
el adjunto del elemento i = 2, j = 3 es ∆23 = −∣
∣
∣
∣
d11 a
c b
∣
∣
∣
∣
y el adjunto del elemento
i = 3, j = 2 es ∆32 = −∣
∣
∣
∣
d11 c
a b
∣
∣
∣
∣
= − (d11b− ac) = ∆23

204 CAPITULO 7. TEOREMAS CIRCUITALES
Z1Z1 Z2Z2 ZnZn
VG1VG2 VGn
IN1IN2
INn
ZNeqINeq
ZM
VM
· · ·· · ·
≡≡
≡
Figura 7.5: Teorema de Millman
Finalmente, el circuito equivalente de Norton obtenido se pasa a su equi-valente de Thevenin con tension
VM = INeqZNeq (7.14)
ZM = ZNeq (7.15)
y llevando la (7.12) a la (7.15) se obtiene la (7.10).
7.6. Teorema de transferencia de potencia maxima
La potencia activa transferida a una carga ZC depende del valor de lacarga frente a la impedancia de salida del circuito o generador real al cualesta conectada la carga.
7.6.1. Carga resistiva pura
Para una carga resistiva pura se lograra transferir la potencia maximasi el valor de esta resistencia es igual al modulo de la impedancia de salidadel generador real
RC = |ZG| (7.16)
7.6.2. Carga generica
Para lograr transferir la maxima potencia a una carga generica estadebera ser igual al conjugado de la impedancia de salida del generador real
ZC = Z∗G (7.17)

7.7. TRANSFORMACION ESTRELLA - TRIANGULO. TEOREMADE ROSEN205
7.6.3. Carga generica de reactancia fja
Si tiene una carga generica con su parte reactiva fija entonces no sepodra conseguir el conjugado de la impedancia ZG, por lo que la partereactiva de la carga debe considerarse como parte de la impedancia de salidadel generador, lo cual nos lleva al primer caso de carga resistiva pura, donde
ReZC = |ZG + ImZC| (7.18)
7.7. Transformacion estrella - triangulo. Teoremade Rosen

206 CAPITULO 7. TEOREMAS CIRCUITALES
Ejercitacion
1. Encontrar el equivalente de Thevenin en los puntos AB del circuito dela fig. 7.6
5Ω
3Ω
10Ω
20V 106 45V
−j4Ω
A
B
Figura 7.6
2. Segun el teorema de Thevenin la corriente maxima entregada por unasistema esta dada por el cociente entre la tension de salida del sistemaa circuito abierto sobre la impedancia de Thevenin.
Imax =Vo
ZTh
Demostrar utilizando superposicion.
3. Dado el circuito de la figura, encontrar el equivalente de Norton en lospuntos A y B
4, 33Ω
5Ω j10Ω
j2, 5Ω
I1 = 106 0A I2 = 56 0A
A
B
4. El siguiente es el circuito equivalente de la etapa de salida de un am-plificador mas filtro al que se le conecta un parlante de ZL = RL+XL.Si XL = j4, cuanto deberıa ser el valor de RL para que la potenciatransferida a la carga sea maxima?
8Ω
RL
XL = j4Ω
j3Ω
−j2Ω−j5ΩVin
A
B
5. Se desea construir una resistencia para un horno que va a ser alimen-tado por un generador de tension senoidal de Vef = 24V .

7.7. TRANSFORMACION ESTRELLA - TRIANGULO. TEOREMADE ROSEN207
a. Calcular el valor resistivo necesario para lograr maxima transfe-rencia de potencia si la impedancia de salida del generador es deZo = 5 + j3, 32Ω.
b. Calcular la potencia transferida.
c. Construir el triangulo de potencias y diagrama fasorial de tensio-nes del circuito generador mas horno.
Rhorno
5 + j3, 32Ω
246 0
Figura 7.7
6. Encontrar el circuito simple en conexion triangulo equivalente del cir-cuito de la figura 7.8.
10Ω 10Ω
j10Ω j10Ω
5Ω j5Ω
Figura 7.8
7. Una carga se alimenta con tres generadores reales de tension en pa-ralelo de 1806 0. La impedancia de salida de los tres generadores esde Zout = 3 + j9. Calcular la impedancia de salida del sistema y latension de salida a circuito abierto.
8. Si la carga del ejercicio 7 es variable en resistencia y reactancia, cuantodebera valer para transferir la maxima potencia posible y cual sera elvalor de esta potencia?
9. Encontrar el equivalente en conexion triangulo del circuito de la fig.7.9
10. Encontrar la maxima potencia que puede recibir la carga Rcarga delcircuito de la fig. 7.10.
11. El circuito de la fig. 7.11 fue ajustado para que el generador real (conimpedancia interna Zi) transfiera la maxima potencia. Encontrar elequivalente de Thevenin del generador si la potencia maxima transfe-rida es de P = 8653, 8W

208 CAPITULO 7. TEOREMAS CIRCUITALES
5Ω
j5Ω
j10Ω
−j4Ω
Figura 7.9
R1 = 3Ω R2 = 2Ω
R3 = 6Ω Rcarga12V 2A
Figura 7.10: Maxima transferencia de potencia
3− jΩ
12 − j 1
2Ω
1 + j3Ω
9Ω
1− jΩ
3 + j5
generador
real
A
B
Figura 7.11: Maxima transferencia de potencia
12. En el circuito de la fig. 7.12 encontrar la tension de fuente V y lacorriente I segun las referencias indicadas.
3Ω
2Ω
2Ω3Ω
6V 8V
2A
I =? V =?
Figura 7.12: Encontrar V e I
13. Aplicando el teorema de Thevenin, para el circuito de la fig. 7.13 calcu-lar la corriente de regimen permanente en R, con R = 10Ω, R = 100Ωy R = 1000Ω

7.7. TRANSFORMACION ESTRELLA - TRIANGULO. TEOREMADE ROSEN209
100√2 cos(1000t+ 45)
150Ω
R200mH
4µF
Figura 7.13: Calculo de potencia
Soluciones
Ejercicio 1 Solucion
VTh = 11, 396 264,4VZTh = 7, 97− j2, 16
Ejercicio 4 Planteo y resolucion numerica
El teorema de la maxima transferencia de potencia aplicado a unacarga con parte resistiva variable dice que para transferir la maximapotencia de un circuito o generador a la carga, la parte resistiva deesta debe ser igual al modulo de la impedancia de salida del circuitoo generador mas la parte reactiva de la carga
RL = |Zo +XL| (7.19)
y la impedancia de salida del circuito anterior se puede obtener ha-ciendo el equivalente de Thevenin a los bornes A−B, y RL sera
RL = |ZTh +XL| =√(RTh)2 + (XTh +XL)2 (7.20)
ZTh = RTh +XTh
RL
XL = j4Ω
VTh
A
B
Para obtener la impedancia de Thevenin ZTh se debe pasivar la fuenteVin, de esta forma la resistencia de 8Ω forma un paralelo con el ca-pacitor de −j5Ω,que a su vez estan en serie con el inductor de j3Ω.Llamando a esto Z1 tenemos
Z1 =8 (−j5)8− j5
+ j3 = 2,24719− j0,59551 (7.21)
210 CAPITULO 7. TEOREMAS CIRCUITALES
por ultimo, esta impedancia parcial Z1 esta en paralelo con el capacitorde −j2Ω
ZTh =Z1 (−j2)Z1 − j2
= 0,76263− j1,11916 (7.22)
entonces RL debera ser igual a
RL =√(0,76263)2 + (4− 1,11916)2 = 2, 9801Ω (7.23)
Ejercicio 5 Planteo
El teorema de la maxima transferenica de potencia aplicado a unacarga resistiva variable dice que para transferir la maxima potenciade un circuito o generador a la carga, la resistencia de carga debe serigual al modulo de la impedancia de salida del circuito o generador, esdecir que para este caso
Rhorno = |Zo| (7.24)
La potencia transferida con esta resistencia de carga sera
Ptransf = |I|2Rhorno (7.25)
donde la corriente total es
I =V
ZT
=V
(Zo +Rhorno)(7.26)
El triangulo de potencias se determina como
S = |V| |I|; P = |V| |I| cos(ϕ); Q = |V| |I| sen(ϕ)
Se calculan las caıdas de tension en Zo y en Rhorno para construir eldiagrama fasorial
VZ = IZo; VR = IRhorno

7.7. TRANSFORMACION ESTRELLA - TRIANGULO. TEOREMADE ROSEN211
Resolucion numerica
Rhorno =√52 + 3,322 = 6Ω
I =24V
(11 + j3,32)= 2− j0,6Ω = 2,09 6 − 16,8
Ptransf = (2,09)2 6 = 26,2W
S = 24 · 2,09 = 50,16V A
P = 24 · 2,09 · 0,97 = 48W
Q = 24 · 2,09 · 0,26 = 14,5V AR
VZ = (2− j0,6) · (5 + j3,32) = 12 + j3,6V = 12,53 6 16,8
VR = (2− j0,6) · 6 = 12− j3,6V = 12,53 6 − 16,8
En la fig. 7.14 se puede ver el diagrama fasorial completo y el triangulode potencias en la fig. 7.15.
2
4
-2
-4
-6
10 20
I
VZ
VR
VT Re
Im
Figura 7.14: Diagrama fasorial de tensiones
P = 48W
S = 50,16V AQ = 14,5V AR
θ = −16,7
Figura 7.15: Triangulo de potencias
Ejercicio 7 Solucion
Zout = 1 + j3ΩVT = 180V

212 CAPITULO 7. TEOREMAS CIRCUITALES
Ejercicio 9 Solucion
ZA = 1− j4Ω , ZB = 4 + j1Ω , ZC = −0, 55 + j3, 38Ω
Ejercicio 10 Solucion
Pmax = 16W
Ejercicio 11 Planteo y resolucion numerica
Un generador real transmite la maxima potencia cuando se lo cargacon una impedancia igual al conjugado de su impedancia de salida. Co-nociendo la impedancia de carga que permite la maxima transferenciade potencia se conoce entonces la impedancia de salida del generdador.
Para encotrar la impedancia equivalente que carga al generador se re-duce el circuito de carga mediante una transformacion estrella-triangu-lo de las impedancia Z1 = 3− jΩ, Z2 = 1/2− j1/2Ω y Z3 = 1 + j3Ω.El circuito resultante es el de la fig. 7.16.
ZA =Z1Z2 + Z1Z3 + Z2Z3
Z3= 3− j2Ω
ZB =Z1Z2 + Z1Z3 + Z2Z3
Z2= 2 + j16Ω
ZC =Z1Z2 + Z1Z3 + Z2Z3
Z1= 2 + j3Ω
3−j2Ω
2 + j16Ω
2+j3Ω
9Ω
1− jΩ
3 + j5
generador
real
A
B
Figura 7.16: Transformacion estrella-triangulo
luego, la impedancia equivalente vista desde los bornes del generadores
Zeq = (9//ZA) //[(1− j)//ZB + (3 + j5)//ZC ]
Zeq = [9//(3− j2)] // [(1− j)//(2 + j16)] + [(3 + j5)//(3 + j5)]Zeq = (2, 4324− j1, 0946) // (1, 12821− j0, 97436 + 1, 2022 + j1, 8764i)
Zeq = 1, 3982− j0, 0184Ω

7.7. TRANSFORMACION ESTRELLA - TRIANGULO. TEOREMADE ROSEN213
es decir que la impedancia interna del generador es
Zi = Z∗eq = 1, 3982 + j0, 0184Ω (7.27)
que es tambien la impedancia equivalente de Thevenin.
La potencia transferida a la carga es P = 8653, 8W , entonces el modulode la corriente es
|I| =√
P
Re[Zeq]=
√8653, 8
1, 3982
|I| = 78,671A
Finalmente, la tension de Thevenin se obtiene como el producto de lacorriente total por la impedancia total
Vth = I · (Zi + Zeq) = 220V
220V
1, 3982 + j0, 0184Ω
1, 3982− j0, 0184Ω
generador real
A
B
Figura 7.17: Equivalente de Thevenin del generador real

214 CAPITULO 7. TEOREMAS CIRCUITALES

Capıtulo 8
Resonancia
8.1. Resonancia en un circuito serie RLC simple
Si se alimenta un circuito serie RLC con una fuente de frecuencia ωvariable, los valores de las reactancias inductivas y capacitivas varıan enfuncion de la frecuencia. Es decir, la impedancia Z(jω) compuesta por
Z(jω) = R+ j ωL− j1
ωC= R+ j
(ωL− 1
ωC
)(8.1)
se modifica mientras varıa la frecuencia de excitacion. Observando la partereactiva de (8.1) vemos que para algun valor de ω = ω0 los modulos de lasreactancias seran iguales
ω0L =1
ω0C(8.2)
despejando ω0 de la igualdad 8.2 obtenemos
ω0 =1√LC⇒ f0 =
1
2π√LC
(8.3)
con ω0 = 2π f0. Como L y C son siempre positivos, de (8.3) se sigue quesiempre existe una frecuencia real que anule la parte reactiva de un circuitoRLC serie. La frecuencia ω0 que produce la anulacion de la parte reactivade un circuito se la llama frecuencia de resonancia.
Al anularse la parte reactiva la impedancia total equivalente del circuitose hace Z0 = R, entonces el fasor tension de alimentacion V aparece en fasecon el fasor de corriente I, y el circuito tendra en resonancia un factor depotencia fp = 1 (cosϕ = 1).
Desde el punto de vista practico, que se anule la parte reactiva de laimpedancia equivalente de un circuito significa que ya no habra intercambiode energıa entre la fuente de excitacion y el circuito, sino que el intercambiose realizara internamente en el circuito entre los elementos reactivos. Este
215

216 CAPITULO 8. RESONANCIA
intercambio se realiza de forma que cuando la energıa en el inductor esmaxima, en el capacitor es cero y biceversa, manteniendose constante laenergıa total almacenada.
8.1.1. Variacion de la impedancia
En la figura 8.1 podemos ver la variacion de cada parametro de impe-dancia en funcion de la frecuencia. La resistencia R se mantiene constantemientras que las reactancias inductiva y capacitiva, y el modulo de la impe-dancia |Z(jω)| varıan a lo largo de todo el eje de ω. Para frecuencias bajas ymenores a la frecuencia de resonancia, vemos que el modulo de la reactanciainductiva es menor que el modulo de la reactancia capacitiva, esto hace quela fase de Z(jω) sea negativa, como se observa en la figura 8.2, y el circuitopresenta caracter capacitivo. Para frecuencias mayores a ω0 la reactanciainductiva se hace mayor que la capacitiva y el circuito adquiere caracterinductivo.
Ω
ωω0
Z0 = R
|Z(jω)| =√R2 + (ωL− 1
ωC)2
XL = ωL
|XC |
XC = − 1ωC
X = XL +XC
R
Figura 8.1: Variacion de las parametros de impedancia de un RLC serie en funcionde la frecuencia
En la grafica de fase de la figura 8.2 vemos que la fase pasa por cero enresonancia, es decir que Z0 es un numero real puro.
Tambien puede observarse en la grafica de la figura 8.1 que en el puntode resonancia el modulo de la impedancia pasa por un mınimo de valor R.En este punto la corriente del circuito tendra su maximo modulo ya que
|I| = |V||Z| (8.4)
y en nuestro caso |V| es constante.Un analisis fasorial a diferentes frecuencias alrededor de resonancia puede
verse en la figura 8.3. Para ω < ω0 la tension esta atrasada respecto de la

8.1. RESONANCIA EN UN CIRCUITO SERIE RLC SIMPLE 217
fase
ωω0
90
−90
disminucion de R
aumento de R
Figura 8.2: Fase de la impedancia de un circuito resonante serie en funcion de lafrecuencia
corriente, por el caracter capacitivo del circuito a estas frecuencias. Paraω = ω0 los fasores de tension VC y VL tienen igual modulo pero con 180
de desfasaje, por lo que su suma vectorial es nula, y los fasores de tensionaplicada y corriente estan en fase. La caıda de tension en R es por ende iguala la tension aplicada, VR = VT . Por ultimo, para ω > ω0 la tension adelantaa la corriente por el caracter inductivo del circuito a estas frecuencias.
III
V
V
V
VR = R I
VR
VR
VL = ωL IVL
VL
VC = −j 1ωC
I
VCVC
ω < ω0 ω = ω0 ω > ω0
Figura 8.3: Diagrama fasorial de un circuito serie RLC para ω < ω0, ω = ω0 yω > ω0
8.1.2. Analisis de admitancias
El modulo de la corriente es el producto del fasor tension por su admi-tancia equivalente |I| = |V| |Y |, si se mantiene |V| = cte como en el casoque estamos analizando, la variacion del modulo de la corriente sera identicaa la variacion del |Y (jω)|, y solo habra una diferencia de escala entre susgraficos.
Para graficar Y (jω), definida como la inversa de la impedancia Z(jω),debemos conocer por un lado su modulo y por otro su fase
Y (jω) =1
Z(jω)=
1
|Z| 6 ϕZ
=1
|Z|6 (−ϕZ)

218 CAPITULO 8. RESONANCIA
es decir
|Y | = 1
|Z|ϕY = −ϕZ
La figura 8.4a corresponde a la grafica de modulos de admitancias condistintos valores de resistencia de un circuito resonante serie. En el puntode resonancia ω = ω0 la corriente toma su maximo valor y es limitada solopor la resistencia, por lo tanto cuanto menor es el valor resistivo, mayor eseste maximo.
R → 0
R → ∞
|Y (jω)|
ω0ω
(a)
fase
ω
ω0
90
−90 disminucion de R
aumento de R
(b)
Figura 8.4: Variacion de la admitancia en modulo y fase de un circuito resonanteserie para distintos valores de resistencia
8.2. Sobretension en circuitos serie resonantes
Ciertos valores de impedancias en circuitos resonantes serie producen unfenomeno muy particular al variar la frecuencia, este fenomeno se da cuandoel modulo de la impedancia total se hace menor al modulo de las reactanciasinductiva o capacitiva. Como el modulo de la tension aplicada es igual alproducto del modulo de la impedancia por el modulo de la corriente, y elmodulo de la caıda de tension en el inductor o el capacitor es otra vez elproducto del modulo de su impedancia reactiva por el |I|, entonces si paraalgunos valores de frecuencia el |Z| se hace menor al |XL| o al |XC | se tendra
|I| |Z| < |I| |X| (8.5)
|VT| < |VX| (8.6)
y habra sobretension en el inductor o en el capacitor, segun sea la frecuencia.Un analisis mas detallado puede hacerse con la ayuda del grafico de los
modulos de las impedancias, eligiendo valores de resistencia, inductancia ycapacitancia adecuados. En la figura 8.5 se grafica esta situacion. Como seve, el |Z| es para algunas frecuencias menor a los modulos de las reactancias.

8.2. SOBRETENSION EN CIRCUITOS SERIE RESONANTES 219
Analicemos cada elemento por separado empezando por el inductor. Seaωa la frecuencia a la cual el modulo de la impedancia total se hace igual almodulo de la inductancia (figura 8.5), entonces de la igualdad |Z(jωa)| =|XL(jωa)| despejamos ωa
√
R2 +
(ωaL−
1
ωaC
)2
= ωaL
R2 + (ωaL)2 − 2
L
C+
(1
ωaC
)2
= (ωaL)2
(1
ωaC
)2
= 2L
C−R2
ωa =1
C√
2 LC−R2
(8.7)
En ω = ωa el |Z| se cruza con el |XL|, es decir que en este punto el modulode la caıda de tension en el inductor sera igual al modulo de la tensionaplicada. Para frecuencias mayores a ωa, el |VL| sera siempre mayor al |VT|y habra sobretension en el inductor.
Si 2 LC−R2 = 0 entonces la ecuacion 8.7 tiende a ∞, lo que significa que
no habra sobretension a ninguna frecuencia. El valor crıtico de resistenciaque inicia la sobretension en el inductor es entonces
Rc =
√2L
C(8.8)
y para todo valor de R < Rc habra sobretension en L.Haciendo el mismo analisis ahora sobre el capacitor
|Z(jωb)| = |XC(jωb)| (8.9)
R2 +
(ωbL−
1
ωbC
)2
=
(1
ωbC
)2
(ωbL)2 = 2
L
C−R2
ωb =
√2 L
C−R2
L(8.10)
La ecuacion 8.10 indica el valor de frecuencia para el cual los modulo de laimpedancia total y reactancia capacitiva se igualan. Esta frecuencia ωb seindica en la figura 8.5. Para todo ω < ωb hay sobretension en el capacitor.
Si 2 LC− R2 = 0 entonces la ecuacion 8.10 se hace cero, es decir que no
existe sobretension para ninguna frecuencia. La resistencia crıtica obtenidade esta ecuacion es
Rc =
√2L
C

220 CAPITULO 8. RESONANCIA
identica a la obtenida para el caso del inductor. Es decir que el efecto desobretension aparece simultaneamente en ambos elementos reactivos y lacondicion para la existencia del mismo viene dada por la ecuacion 8.8.
Ω
ωω0
Z0 = R
|Z(jω)|
|XL|
|XC |
sobretension en L
sobretension en C
ωa ωb
R
Figura 8.5: Modulos de impedancias de un circuito con sobretension
En la figura 8.6 se ve como el modulo de la tension en el capacitor VC esmayor que el modulo de la tension aplicada VT desde ω = 0 hasta ω = ωb.El modulo de la tension VL en el inductor es menor que |VT | hasta ω = ωa
y luego se mantiene superior para todas las frecuencias superiores. Para losvalores de frecuencia ωa < ω < ωb, incluso en resonancia, existe sobretensionen ambos elementos reactivos.
Ω
ωω0
∣∣VL
∣∣
∣∣VC
∣∣
sobretension en L
sobretension en C
ωa ωb
∣∣VT
∣∣
Figura 8.6: Sobretension en los elementos reactivos provocada por el valor de
R <√2 L
C
8.3. Ancho de banda
Segun lo visto en la seccion anterior, la respuesta de un determinadocircuito ante una senal variable depende de la frecuencia de la senal. Estarespuesta tiene una amplitud maxima para la frecuencia de resonacia y de-crece para frecuencias fuera de la resonancia. A medida que la frecuencia dela senal se aleja de la de resonancia la amplitud de la respuesta disminuye,

8.3. ANCHO DE BANDA 221
pero sin llegar nunca a ser nula. A los fines practicos es util definir un valorde frecuencia llamado frecuencia de corte a partir del cual la amplitud de larespuesta toma algun valor particular, este umbral se elige en terminos depotencia y el valor elegido es la mitad de la potencia maxima disipada porla respuesta, llamado normalmente potencia mitad.
Luego, se define como ancho de banda de un circuito al rango de fre-cuencias dentro del cual un senal disipa una potencia mayor a la potenciamitad, es decir
AB = ω2 − ω1 (8.11)
con ω1 y ω2 las frecuencias de corte inferior y superior respectivamente.
8.3.1. Circuito RLC serie
A la relacion entre la frecuencia de excitacion y la respuesta de un sistemase la llama respuesta en frecuencia, la figura 8.4a por ejemplo muestra larespuesta en frecuencia de corriente de un circuito RLC excitado por unafuente de tension de modulo constante, ya que |I| = |V||Y |.
En este caso la maxima disipacion de potencia tiene lugar a la frecuenciade resonancia ω0
Pmax = |I0|2R (8.12)
si llamamos P2 a la potencia mitad e I2 a la corriente que disipa esa potenciatenemos
P2 =Pmax
2=|I0|2R
2= |I2|2R (8.13)
de donde
|I2| =|I0|√2
(8.14)
es decir que la corriente que logra disipar la mitad de la potencia maximatiene un modulo
√2 veces menor al de la corriente I0 que disipa la potencia
maxima. En la figura 8.7 se muestra el ancho de banda de un circuito RLCserie, donde se marca los valores de frecuencia para los cuales se tiene una
corriente de modulo |I0|√2.
Segun la ec. (8.14), el modulo de la corriente en los puntos de poten-cia mitad es
√2 veces menor que la corriente maxima, por lo tanto a esta
frecuencia el modulo de la impedacia sera√2 mayor que en resonancia,
|Z2| =√2R. Por trigonometrıa podemos concluir que para lograr dicho au-
mento en el modulo de la impedancia la parte reactiva debe ser igual enmodulo a la parte resistiva del circuito
R =
∣∣∣∣ωL−1
ωC
∣∣∣∣ (8.15)

222 CAPITULO 8. RESONANCIA
|I0|
0,707|I0|
ωω1 ω2
Figura 8.7: Respuesta en frecuencia y ancho de banda de un RLC serie
Esta igualdad se cumple para dos frecuencias distintas, una menor a la deresonancia donde la impedancia total equivalente tendra caracter capaciti-vo, y otra mayor a ω0 que corresponde a la Z de caracter inductivo. Paraω = ω1 < ω0 la reactacia total equivalente es capacitiva, entonces podemosescribir la anterior sin las barras de modulo
R =1
ω1C− ω1L (8.16)
y operando se obtienen dos valores que cumplen con la igualdad (8.16)
ω1 = −R
2L±
√(R
2L
)2
+1
LC(8.17)
de los cuales el valor mayor a cero sera la frecuencia de corte inferior ofrecuencia de potencia mitad buscada.
Mediante un analisis similar para ω2, donde el circuito es de caracterinductivo, se obtiene
R = ω2L−1
ω2C(8.18)
de donde
ω2 =R
2L±
√(R
2L
)2
+1
LC(8.19)
y el valor mayor a cero de estos corresponde a la frecuencia de corte superior
o frecuencia de potencia mitad.

8.4. FACTOR Q0 223
Luego, el ancho de banda de un RLC serie es
AB = ω2 − ω1 =R
L(8.20)
Observando las ec. (8.17) y (8.19) se ve que solo hay una diferencia designo, por lo que de
ω1,2 =
∣∣∣∣∣∣R
2L±
√(R
2L
)2
+1
LC
∣∣∣∣∣∣(8.21)
se obtienen las dos frecuencias de corte, superior e inferior.
La relacion entre las frecuencias de potencia mitad y la frecuencia deresonancia puede verse facilmente haciendo el producto entre ω1 y ω2
ω1ω2 =1
LC= ω2
0 (8.22)
es decir que ω0 es la media geometrica de ω1 y ω2
ω0 =√ω1ω2 (8.23)
8.4. Factor Q0
En un circuito resonante se define un factor Q0 representativo de lascaracterısticas energeticas del circuito. Este factor viene dado por el cocienteentre la energıa maxima almacenada y la energıa disipada por ciclo, por unaconstante de normalizacion 2π
Q0 = 2πEnergıa maxima almacenada
Energıa disipada por ciclo(8.24)
como en resonancia la energıa maxima almacenada en el inductor es igual ala energıa maxima almacenada en el capacitor, se puede usar una u otra enel calculo de Q0. La energıa instantanea almacenada en el inductor es
wL(t) =1
2L(iL)
2 (8.25)
tomando su maximo valor cuando la corriente iL(t) sea maxima
WLmax=
1
2L(ILmax
)2 (8.26)
y en el capacitor
wC(t) =1
2C(vC)
2 ⇒WCmax=
1
2C(VCmax
)2 (8.27)
224 CAPITULO 8. RESONANCIA
La energıa instantanea disipada es
wR(t) = R
∫(iR)
2 dt =1
R
∫(vR)
2 dt (8.28)
supongamos una corriente por iR(t) = IRmaxcos(ω0t), la energıa disipada
por ciclo en terminos de la corriente sera
WR =π
2ω0R(IRmax
)2 (8.29)
con 2πω0
= T0 el perıodo de la senal en resonancia. Luego, llevando (8.26) y(8.29) a (8.24)
Q0 =w0L(ILmax
)2
R(IRmax)2
(8.30)
si se trata de un circuito serie la corriente por R y por L sera la misma,entonces el Q0 de un RLC serie queda
Q0 =w0L
R=
1
ω0RC(8.31)
ya que en resonancia ω0L = 1ω0C
De igual forma podemos poner la energıa disipada por ciclo en terminosde la tension en R,
WR =π
2ω0
(VRmax)2
R(8.32)
y utilizar la energıa maxima almacenada en el capacitor para el calculo deQ0
Q0 =ω0RC(VCmax
)2
(VRmax)2
(8.33)
si consideramos un circuito paralelo, la tension en R sera igual a la tensionen C, por lo tanto el factor Q0 de un RLC paralelo es
Q0 = ω0RC =R
ω0L(8.34)
Observando la ecuacion (8.31) obtenida antes para un circuito equiva-lente serie vemos que este factor puede ser definido tambien como el cocienteentre la parte reactiva y resistiva de la impedancia, o como el cociente entrela potencia reactiva y la potencia activa
Q0 =XL
R=
XC
R=
Q
P(8.35)
con Q = XLI2 = XCI
2 la potencia reactiva en el inductor o en el capacitor.

8.5. RESONANCIA DE UN CIRCUITO PARALELO DE 2 RAMAS 225
8.5. Resonancia de un circuito paralelo de 2 ramas
Si tenemos un circuito de dos ramas en paralelo como el de la figura 8.8,es probable que exista un valor de frecuencia para el cual este circuito entraen resonancia. Es decir una frecuencia ω0 a la cual la tension de alimentacionV(jω0) = V0 este en fase con la corriente total I(jω0) = I0.
V(jω)
RC
C
RL
L
Figura 8.8: Circito paralelo de dos ramas
Si el fasor tension y el fasor corriente estan en fase, su cociente sera unnumero real puro
Z0 =V0
I0← Numero real puro
Y0 =I0
V0
donde Z0 y Y0 son la impedancia y admitancia equivalente en resonanciadel circuito de la figura 8.8. Para averiguar si la condicion de resonancia esposible se debe verificar si existe alguna frecuencia para la cual se anule laparte imaginaria de la impedancia o admitancia equivalente.
Si llamamos Y1 a la admitancia de la primera rama y Y2 a la de lasegunda, la admitancia equivalente del circuito sera
YT (jω) = Y1(jω) + Y2(jω) =1
RC − jXC
+1
RL + jXL
(8.36)
separando parte real e imaginaria
YT (jω) =
(RL
R2L +X2
L
+RC
R2C +X2
C
)+ j
(XC
R2C +X2
C
− XL
R2L +X2
L
)(8.37)
como la condicion para resonancia es1 Im [YT (jω)] = 0, entonces en (8.37)se debe cumplir
XC
R2C +X2
C
=XL
R2L +X2
L
(8.38)
1Siendo Im[] la parte imaginaria de . . .

226 CAPITULO 8. RESONANCIA
reemplazando las reactancias y operando
1ω0C
R2C + ( 1
ω0C)2
=ω0L
R2L + (ω0L)2
(8.39)
1
ω0C
[R2
L + (ω0L)2]= ω0L
[R2
C + (1
ω0C)2]
(8.40)
R2L
ω0C+ ω0L
L
C= ω0LR
2C +
1
ω0C
L
C(8.41)
luego despejando ω0 tenemos
ω0 =1√LC
√R2
L − LC
R2C − L
C
(8.42)
esta es la frecuencia de resonancia del circuito de la figura 8.8. Para que estafrecuencia exista, debe ser un numero real positivo, es decir que el radicandode la ec. 8.42 debe ser mayor que cero. Habra entonces resonancia si
R2L −
L
C> 0 y R2
C −L
C> 0 (8.43)
o si
R2L −
L
C< 0 y R2
C −L
C< 0 (8.44)
de lo contrario el circuito no entrara en resonancia a ninguna frecuencia.Si los valores R2
L, R2C y L
Cson iguales, tendremos una indeterminacion
en la ec. 8.42 y no se puede determinar si habra o no resonancia a algunafrecuencia. Para analizar que ocurre volvamos unos pasos atras. SupongamosR2
L = R2C = L
C= β y reemplacemos esta constante en (8.41)
β
ω0C+ ω0Lβ = ω0Lβ +
1
ω0Cβ (8.45)
obtenemos una igualdad se cumple para cualquier frecuencia, y como es-ta igualdad implica Im [YT (jω)] = 0 entonces para cualquier frecuencia laadmitancia total sera un numero real puro y habra resonancia a todas lasfrecuencias.
8.6. Lugar geometrico
Se conoce como lugar geometrico al conjunto de puntos que satisfacenuna propiedad. Por ejemplo el conjunto de valores que una funcion pa-rametrica puede tomar al variar el parametro. En el caso de analisis decircuitos se presentan muchas situaciones donde un parametro del circuito

8.6. LUGAR GEOMETRICO 227
puede variar, y la variacion de este parametro determina el lugar geometri-co de otro, como por ejemplo de la impedancia o de la admitancia total delcircuito.
El lugar geometrico de admitancia de un circuito suele ser de particularinteres porque como normalmente la tension aplicada es constante, entoncesla corriente I = VY tiene igual lugar geometrico que la admitancia.
8.6.1. Elementos en serie
Supongamos un circuito con una impedancia Z, cuya parte imaginariajX puede variar. La impedancia total del circuito sera
Z = R1 ± jX
con R1 constante. Todos los valores que puede tomar Z forman en el planoZ una recta paralela al eje imaginario, que corta al eje real en R1, esto es ellugar geometrico de Z con reactancia variable.
En el plano Y, este lugar de Z representara un lugar de Y en funcion dela conductancia G y de la suceptancia B. Para encontrar el lugar geometricode Y tenemos que encontrar la inversa de Z, en terminos de G y B
Z = R1 ± jX =1
G±B=
G
G2 +B2∓ B
G2 +B2

228 CAPITULO 8. RESONANCIA
Ejercitacion
1. Encontrar la frecuencia de resonancia de un circuito RLC serie conR = 25Ω, L = 21mH y C = 470µF .
2. Calcular para resonancia la corriente total y en cada rama para elcircuito de la fig. 8.9. Construir el diagrama fasorial.
1KΩ100µF
ω0 = 1000 rads
V = 100V
Figura 8.9: Circuito paralelo resonante
3. Para el circuito de la fig. 8.10, existe una frecuencia de resonancia?Calcular.
220Ω
120Ω
56Ω
15µF 100mH
10mH
V = 60V
Figura 8.10: Circuito RLC generico
4. Explicar el fenomeno de sobretension en los elementos reactivos de uncircuito RLC serie alimentado por un generador de tension constantey frecuencia variable. Graficar en un plano Ω vs. ω (plano |Z|) losmodulos de todas las impedancias y mostrar en el grafico en que zonasse produce la sobretension. Graficar ademas los modulos de la tensiontotal |VT |, tension en el inductor |VL| y capacitor |VC | en otro planoV vs. ω destacando las zonas de sobretension en cada elemento.
5. En un circuito RLC serie se varıa la frecuencia ω del generador hastaobtener la caıda de tension maxima en la resistencia. El valor de ten-sion que se obtiene es VR = 20V y se logra a la frecuencia ω0 = 2000 rad
seg.
En estas condiciones se miden las tensiones en los elementos inductivoy capacitivo dando VL = VC = 30V , y el valor de la corriente IT = 4A.Determinar:
a. Ancho de banda y frecuencias de potencia mitad ω1 y ω2
b. Factor de selectividad Q0

8.6. LUGAR GEOMETRICO 229
c. Componentes resistivo, inductivo y capacitivo (R, L y C) delcircuito
6. La potencia disipada por una resistencia de 10Ω de un circuito RLCserie es P = 200W en resonancia, y P = 100W en ω1 = 270,16 yω2 = 370,16.
a. Determinar la frecuencia de resonancia, el ancho de banda delcircuito, el valor del factor Q0 y la capacidad e inductancia de loselementos.
b. Existira sobretension en el circuito? Justificar.
7. Deducir y calcular la frecuencia de resonancia ω0 y el ancho de bandaAB de un circuito RLC paralelo simple, con R = 100Ω, L = 10mHyy C = 20µF .
8. En el circuito de la fig. 8.11 se ajusta la frecuencia de manera queel RLC paralelo (formado por R2L2C) este en resonancia. Bajo estacondicion
a. Dibujar el diagrama fasorial completo de tensiones y corrientes
b. Indicar en el diagrama fasorial de tensiones la tension VAB
VI
R1
R2
L1
L2 C
A
B
C
Figura 8.11: Metodo fasorial
9. El circuito equivalente de un capacitor real viene dado por un inductorL en serie con una resistencia llamada ESR (por el ingles EquivalentSerial Resistor) y con un capacitor ideal C que representa la capacidadpropiamente dicha del elemento real. Ademas, en paralelo se encuentrala resistencia de fuga del dielectrico de muy elevado valor.
L ESR C
RD
ω
Figura 8.12
Si los valores de un capacitor real son L = 2nH, ESR = 0, 1Ω, C =4, 7µF y RD = 10MΩ, se pide:

230 CAPITULO 8. RESONANCIA
a. graficar el lugar geometrico de admitancia del circuito cuando ωvarıa entre 0 e ∞
b. senalar en el grafico los valores ohmicos de corte del lugar con eleje real y los valores de frecuencia ω para estos cortes
c. determinar el rango de frecuencia para el cual el elemento tienecaracter capacitivo
10. Encotrar analıticamente y graficar el lugar geometrico de admitanciae impedancia del circuito de la fig. 8.13.
5Ω 22Hω
Figura 8.13: Lugar geometrico de impedancia y admitancia
11. Para el circuito de la figura 8.14 se pide el desarrollo completo y calculodel lugar geometrico de admitancia y, si el circuito puede entrar enresonancia, para que valor o valores de XC lo hace.
10Ω 10Ω
j10 XC
Figura 8.14: Lugar geometrico de admitancia
12. El circuito de la figura 8.15 es una representacion aproximada delsintonizador de entrada de un receptor de LF de reloj radiocontrolado(http://en.wikipedia.org/wiki/WWVB). Se pide:
a. Calcular el valor del capacitor para que el circuito este en reso-nancia a f = 60KHz.
b. Calcular el valor del capacitor para el cual se transfiere la maximapotencia a Ri, utilizando para este calculo el lugar geometrico deadmitancia del circuito.
c. Utilizando el equivalente de Thevenin recalcular el valor de Cpara maxima transferencia de potencia en la Ri.
13. En el circuito de la fig. 8.16 se ajusta la frecuencia de manera queel RLC paralelo (formado por R2L2C) este en resonancia. Bajo estacondicion

8.6. LUGAR GEOMETRICO 231
300ΩRi = 500Ω
1,5mH
Imax cos(ωt) C
Figura 8.15: Sintonizador de reloj radiocontrolado
a. Dibujar el diagrama fasorial completo de tensiones y corrientes
b. Indicar en el diagrama fasorial de tensiones la tension VAB
VI
R1
R2
L1
L2 C
A
B
C
Figura 8.16

232 CAPITULO 8. RESONANCIA
Soluciones
Ejercicio 1 Solucion
ω0 = 318,3 rads
Ejercicio 2 Solucion
IR = 0,1AIL = 106 − 90AIC = 106 90A
IT = 0,1A
Ejercicio 6 Solucion
1. La frecuencia de resonancia de un circuito RLC serie es la mediageometrica de las frecuencias de potencia mitad ω1 y ω2
ω0 =√ω1ω2 =
√270,16 · 370,16 = 316,23
rad
s(8.46)
f0 =2π
ω0= 50,329hz (8.47)
y el factor de calidad Q0 viene dado por
Q0 =ω0
ω2 − ω1= 3,16 (8.48)
de donde se puede obtener el ancho de banda AB
AB =f0Q0
= 15,915hz (8.49)
Ademas, el factor Q0 se define en terminos de los elementos delcircuito como
Q0 =ω0L
R
de donde
L =Q0R
ω0= 0,1H (8.50)
Finalmente, la frecuencia de resonancia expresada en terminos deL y C es
ω0 =1√LC

8.6. LUGAR GEOMETRICO 233
de donde
C =1
Lω20
= 100µF (8.51)
2. La resistencia crıtica para este circuito es
Rc =
√2L
L=
√2
0,1
100× 10−6= 44,721Ω (8.52)
como R = 10Ω es menor a la resitencia crıtica, existe sobreten-sion.
Otra forma de justificar es a partir del valor de Q0. En resonancia,el modulo de la tension que cae en los elementos reactivos es Q0
veces el modulo de la tension aplicada
|VL| = |VC | = Q0|VTotal|
como para este caso Q0 es mayor que 1, en el circuito existira so-bretension.

234 CAPITULO 8. RESONANCIA

Capıtulo 9
Circuitos acopladosinductivamente
9.1. Autoinduccion e induccion mutua
La tension inducida en un inductor es, por ley de Faraday, porporcionala la variacion de flujo que abraza las espiras y a su numero de espiras N
V = NdΦ
dt(9.1)
la corriente que atravieza al inductor genera un flujo proporcional al coefi-ciente de autoinduccion L
di
dtL =
dΦ
dtN (9.2)
de forma que llevando (9.2) a (9.1) tenemos la ya conocida ecuacion de latension autoinducida en un inductor
V = Ldi
dt(9.3)
La ecuacuion (9.3) nos da la tension autoinducida en un inductor provo-cada por el flujo que genera la circulacion de corriente por el propio inductor.Si ahora acercamos un segundo inductor por el cual circule una corriente i2,de forma tal que parte del flujo generado por esta corriente se concatene conel del primer inductor, la tension inducida en este sera
VL1= N1
dΦ
dt= N1
dΦ1
dt+N1
dΦ21
dt(9.4)
con Φ1 el flujo generado por la propia corriente i1 del primer inductor y Φ21
la porcion de flujo generado por el segundo inductor que por proximidadabraza las espiras del primero.
235

236 CAPITULO 9. CIRCUITOS ACOPLADOS INDUCTIVAMENTE
La concatenacion de flujo puede ser positiva o negativa, es decir el flujoΦ1 propio del primer inductor puede verse reforzado o deblitado por el flujoΦ21 aportado por el segundo inductor dependiente de la direccion de laslıneas de flujo. La direccion de las lıneas de flujo en un arrollamiento vienedado por la regla de la mano derecha y depende del sentido del arrollamientoy de la corriente que lo atraviese.
Para el caso que los flujos se debiliten la ec. (9.4) sera
VL1= N1
dΦ
dt= N1
dΦ1
dt−N1
dΦ21
dt(9.5)
El coeficiente de autoinduccion L relaciona la corriente y el flujo que estagenera mediante el numero de vueltas N , (9.2), pero al considerar un flujoΦ21 que esta siendo generado por una corriente i2 y abrazando un arrolla-miento N1 se debe intrudicir otro coeficiente que relacine estas cantidades.Este coeficiente recibe el nombre de coeficiente de inductancia mutua M1,se mide en Henrios y relaciona la corriente en el inductor 2 con el flujo quegenera y abraza a las espiras del inductro 1
di2dt
M1 =dΦ21
dtN1 (9.6)
Ahora podemos poner las ecuaciones (9.4) y (9.5) en terminos de lascorrientes por los inductores i1 e i2 quedando
VL1= L1
di1dt±M1
di2dt
(9.7)
donde el signo del termino de induccion mutua dependera de la concatena-cion de los flujos, positivo si los flujos se refuerzan y negativo si se debilitan.

9.1. AUTOINDUCCION E INDUCCION MUTUA 237
Ejercitacion
1. Para el circuito acoplado de la fig. 9.1 se pide encontrar la matriz deimpedancias.
15Ω
10Ω j4Ωj8Ωj3Ω
−j2Ω506 0 I1 I2
Figura 9.1: Hallar la matriz de impedancias
2. Del circuito de la fig. 9.2 se pide
Encontrar I1 e I2
Dibujar el diagrama fasorial completo de tensiones y corrientes.Utilizar un sistema de ejes para cada malla
V1 = 186 0 V2 = 226 30I1 I2
20Ω 20Ω
j9Ω j9Ω
−j5Ωk = 13
Figura 9.2: Determinar I1 e I2
3. Del circuito de la fig. 9.3 se pide
Encontrar I1 e I2
Calcular la caıda de tension que medira un voltimetro a bornesde cada elemento de la malla 1
Dibujar el diagrama fasorial de tensiones y corrientes de la malla1
V1 = 1006 0 I1 I2
4Ω
16Ω
j8Ω
j12Ωj4Ω
Figura 9.3: Encontrar I1 e I2
4. Para el circuito acoplado inductivamente de la fig. 9.4 se pide:

238 CAPITULO 9. CIRCUITOS ACOPLADOS INDUCTIVAMENTE
a. Encontrar las corrientes de malla I1 e I2
b. Determinar las componentes de la corriente I2 debido a la fuenteV1 (I21) y debido a la fuente V2 (I22).
c. Construir el diagrama fasorial de cada malla.
V1 = 106 0 V2 = 106 0I1 I2
2Ω −j8Ω
j4Ω j3Ω
j2Ω
Figura 9.4: Encontrar I1 e I2
5. Para el circuito de la fig. 9.5 con ω = 1 y M = 1,2H se pide:
R1 = 2Ω
R2 = 5Ω3H 1H
0,5F
M
12 I1 I2
Figura 9.5: Potencia en acoplamiento inductivo
Resolver I1 e I2 por metodo de mallas. Plantear la matriz de impe-dancias en forma directa explicando brevemente como se calculancada elemento.
Construir el triangulo de potencias.
Calcular las potencias activas en R1 y R2 y comparar con lapotencia activa total.
6. En el circuito de la fig. 9.6 se pide conformar la matriz Z indicando enforma detallada la obtencion de cada uno de los componentes de dichamatriz
7. Dado el circuito de la figura 9.7 se pide
a. Potencia en las resistencias.
b. Triangulo de potencias en el generador.
8. Deducir las impedancias propias de cada malla y la copedancia delcircuito de la fig. 9.8 segun las corrientes I1 y I2, siendo k∗ = 0,6 yk# = 0,8.

9.1. AUTOINDUCCION E INDUCCION MUTUA 239
2Ω
3H 1H
k = 0,78
500µF
10 cos(30t) I1 I2
Figura 9.6: Acoplamiento magnetico
20
8
4
−j7
j8 j8
k = 0,75
I1 I2
Figura 9.7: Calculo de potencia
1Ω
8Ω
j10
j8 j20
−j15k∗
k# ∗∗
#
#
I1 I2
Figura 9.8: Acoplamiento inductivo
V I1 I2
R1
R2
L1
L2
L3
M1 M2
Figura 9.9: Acoplamiento inductivo
9. Calcular la copedancia Z12 del sistema de la fig. 9.9
10. Se tiene un amplificador de audio de impedancia de salida |ZA| =8Ω, (ZA = 6 − j5,3) y se desea conectar un parlante cuya curva deimpedancia de cono al aire indica que para f = 5kHz → Zp = 4Ω.Se construye el circuito de la figura 9.10 con el fin que el amplificadortransfiera la maxima potencia al parlante en f = 5kHz. Calcular L1
y L2.
11. Encontrar el valor de Rc que maximice la transferencia de potencia en

240 CAPITULO 9. CIRCUITOS ACOPLADOS INDUCTIVAMENTE
Amplificador
I1 I2L1 L2
k = 1
Rp
Figura 9.10: Carga con acoplamiento inductivo
el circuito de la figura 9.11.
V
5
Rc
j12
j10
j8
j4
j6
Figura 9.11: Carga con acoplamiento inductivo
12. En el circuito de la figura 9.12 determinar la impedancia a conectaren los terminales A−B para maxima transferencia de potencia.
9 + j11 8 + j5
2 −j2j3 j5
j
A
B
Figura 9.12: Maxima transferencia de potencia

9.1. AUTOINDUCCION E INDUCCION MUTUA 241
Soluciones
Ejercicio 2 Planteo y resolucion numerica
La matriz de impedancia es
Z =
(20 + j9 j3
j3 20 + j4
)
su determinante principal, y sustitutos son
∆Z = 373 + j260
∆s1 = 393 + j14,84
∆s2 = 282,05 + j337,47
El calculo de las corrientes es entonces
I1 =∆s1∆Z
= 0, 876 − 32, 7
I2 =∆s2∆Z
= 0, 976 15, 2
Para los diagramas fasoriales las tensiones en la malla 1 y 2 son
VR1 = 14, 5− j9, 3
VL1 = 4, 2 + j6, 5
VM1 = −0, 7 + j2, 8
VR2 = 18, 67 + j5, 1
VL2 = −2, 3 + j8, 4
VC2 = 1, 27− j4, 67
VM2 = 1, 4 + j2,18
Ejercicio 3 Planteo y resolucion numerica
La matriz de impedancia es
Z =
(4 + j8 + 2 · j4 + j12 −j4− j12
−j4− j12 16 + j12
)
y su determinante principal, y sustitutos son
∆Z = −16 + j496
∆s1 = 1600 + j1200
∆s2 = j1600

242 CAPITULO 9. CIRCUITOS ACOPLADOS INDUCTIVAMENTE
V1
VR1
VL1VM1 Re
Im
Figura 9.13: Diagrama fasorial de tensiones y corrientes para la malla 1
V2
VR2
VL2
VC2
VM2
Re
Im
Figura 9.14: Diagrama fasorial de tensiones y corrientes para la malla 2
El calculo de las corrientes es entonces
I1 =∆s1∆Z
= 2, 31− j3, 3A = 4, 036 − 55A
I2 =∆s2∆Z
= 3, 22− j0, 1A = 3, 226 − 1, 85A
Las tensiones medidas por un voltimetro en cada elemento de la malla1 son
|VR1| = |I1 ·R1| = 16, 11V
|VL1| = |I1 · jωL1 + I1 · jωM − I2 · jωM | = 41, 9V
|VL2| = |I1 · jωL2 − I2 · jωL2 + I1 · jωM | = 51, 6V

9.1. AUTOINDUCCION E INDUCCION MUTUA 243
Para los diagramas fasoriales las tensiones en la malla 1 son
VR1= 9, 25− j13, 2V
VL1= 39, 19 + j14, 86V
VL2= 51, 56− j1, 66V
V1
VR1
VL1
VL2
I1
Re
Im
Figura 9.15: Diagrama fasorial de tensiones y corrientes para la malla 1
Ejercicio 10 Planteo y resolucion numerica
Para transferir la maxima potencia al parlante se deben ajustar losvalores de las inductancias para que la impedancia vista desde el am-plificador sea igual a Z∗
A. Es decir, se deben ajustar las inductanciasXL1
y XL2para que la Zi del circuito equivalente de la fig. 9.16 sea
igual al conjugado de la impedancia de salida del amplificador.
I1 I2V XL1
XL2
Zi
k = 1
Rp
Figura 9.16: Impedancia de entrada

244 CAPITULO 9. CIRCUITOS ACOPLADOS INDUCTIVAMENTE
Una forma de obtener la impedancia de entrada Zi es por metodo demallas [
V0
]=
[XL1
−XM
−XM Rp +XL2
] [I1I2
]
donde la impedancia de entrada es
Z11 =∆Z
∆11=
RpXL1+XL1
XL2−X2M
Rp +XL2
Z11 =XL1
Rp
Rp +XL2
= Zi
Otra forma es convertir el circuito de la figura 9.16 en el modelo equi-valente acoplado conductivamente (figura 9.17), de donde
XM
XL1−XM XL2
−XM
Zi
Rp
Figura 9.17: Impedancia de entrada
Zi = XL1−XM +
[(XL2
−XM +Rp)XM
Rp +XL2
]
Zi =XL1
Rp
Rp +XL2
Finalmente, para lograr la maxima transferencia de potencia se debetener
Zi = Z∗A = 6 + j5,3
Reemplazando por los valores numericos y operando
6 + j5,3 =4XL1
4 +XL2
24 + j21,2 + 6XL2+ j5,3XL2
= 4XL1

9.1. AUTOINDUCCION E INDUCCION MUTUA 245
luego igualando parte real e imaginaria
24 = −j5,3XL2→ XL2
=24
−j5,3 = j4,53
−j21,2 + 4XL1= 6XL2
→ XL1=
j27,18 + j21,2
4= j12,1
L2 =|XL2
|2πf
→ L2 =4,53
2π5× 103= 144µH
L1 =|XL1
|2πf
→ L1 =12,1
2π5× 103= 385µH

246 CAPITULO 9. CIRCUITOS ACOPLADOS INDUCTIVAMENTE
Capıtulo 10
Sistemas polifasicos
10.1. Sistemas polifasicos
La transmision de energıa de un generador a una carga mediante unalınea bifilar constituye lo que se denomina un sistema monofasico. Si seinterconectan varios sistemas monofasicos de manera definida se obtendra loque se llama un sistema polifasico. Un sistema polifasico esta constituidopor n tensiones sinusoidales de la misma frecuencia, conectadas a n cargas atraves de n pares de conductores. La palabra fase se emplea para denominaruna parte del sistema polifasico como se vera mas adelante, ası los sistemasreciben un nombre de acuerdo al numero de fases que los componen, dandolugar a sistemas bifasicos, trifasicos, tetrafasicos, etc. El mas utilizado delos sistemas polifasicos es el trifasico por tener marcadas ventajas frente alos otros, como mejor aprovechamiento del cobre y hierro en los generadosy tambien del cobre en los cables de distribucion, debido a un eficientetransporte de energıa.
10.2. Sistema bifasico
Una espira en rotacion en un campo magnetico constante genera unasenal de forma sinusoidal con una frecuencia dada por la velocidad angularde la espira
Vesp1 = Vmax cos(ωt) (10.1)
Si se hace rotar una segunda espira en el mismo campo dispuesta a 90
fısicos de la primera, se inducira en esta una tension con la misma frecuenciaangular ω pero desfasada 90 electricos de la anterior, si ademas ambasespiras tiene la misma geometrıa la tension maxima inducida en cada unasera la misma
Vesp2 = Vmax cos(ωt+ 90) (10.2)
247

248 CAPITULO 10. SISTEMAS POLIFASICOS
Esta maquina con dos arrollamientos identicos devanados en cuadraturagenera entonces dos tensiones sinusoidales desfasadas 90 entre sı. Es decirque puede ser representada por dos generadores de tension sinusoidal deigual frecuencia angular, igual tension maxima y con una diferencia de fasede 90, tal como se indica en la fig. 10.1.
N S ≡ Vesp1 Vesp2
Vmax cos(ωt) Vmax cos(ωt+ 90)
Figura 10.1: Maquina generadora bifasica con sus generadores de tension equiva-lente
Vmax
2π ωt
Vesp1 Vesp2
(a) Dominio del tiempo
Vesp1
Vesp2
Im
Re
(b) Diagrama fasorial
Figura 10.2: Tensiones en el dominio del tiempo y diagrama fasorial de un sistemabifasico
Como se trata de senales sinusoidales y estamos interesados en resolver elregimen permamente de estos sistemas, podemos utilizar el calculo fasorialpara su resolucion. Estas dos tensiones tienen su representacion en el dominiodel tiempo y fasorial como se muestra en la figura 10.2
Denotemos con A y A′ los bornes del primer arrollamiento (o generadorsinusoidal) y con B y B′ a los bornes del segundo. Si conectamos los bor-nes A′ y B′ de los generadores obtendremos un sistema bifasico de tensionVAB = VAA′ + VBB′ . Al punto de union de ambos generadores se lo llamapunto neutro y se lo denota con N , es decir VAA′ = VAN y VBB′ = VBN .Entonces, suponiendo VAN = V 6 0 con V = Vmax√
2tendremos
VAN = V 6 0 (10.3)
VBN = V 6 90 (10.4)
VAB = V 6 0 − V 6 90 =√2V 6 − 45 (10.5)
siendo VAN y VBN las llamadas tensiones de fase y VAB la tension de lınea
del sistema. En la figura 10.3 se muestran estas tensiones en el esquemacircuital del sistema y en el diagrama fasorial.
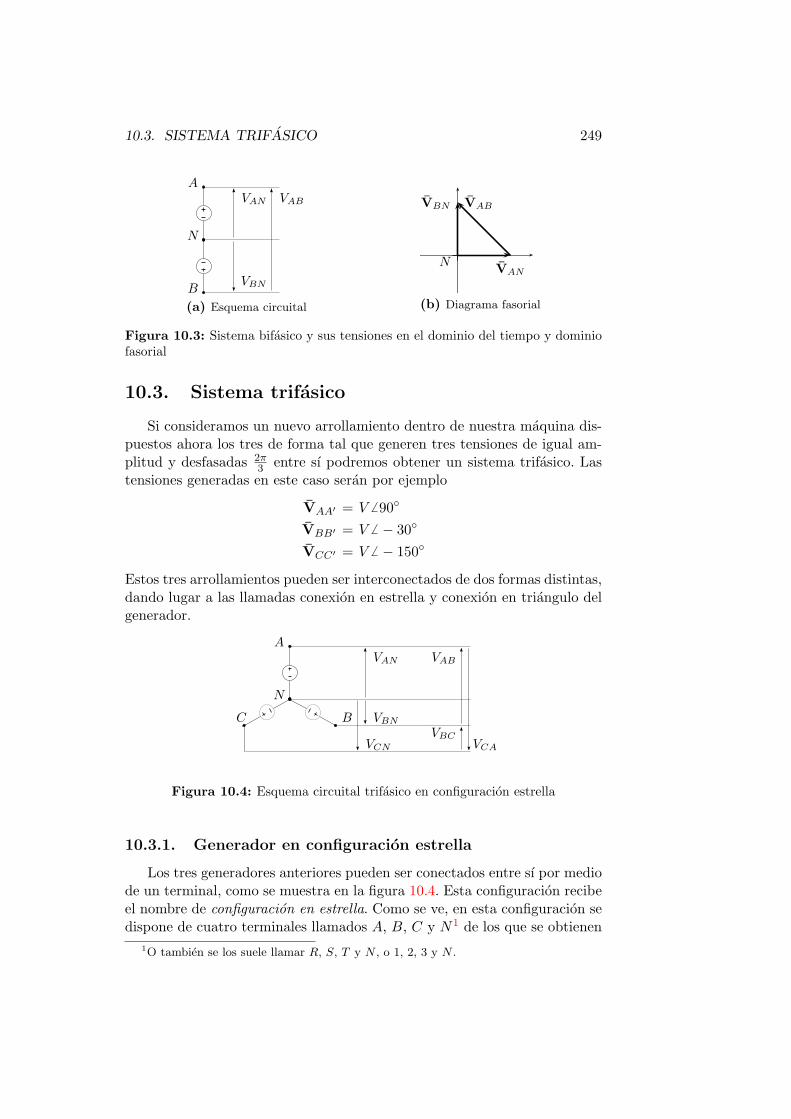
10.3. SISTEMA TRIFASICO 249
A
B
N
VAN
VBN
VAB
(a) Esquema circuital
NVAN
VBN VAB
(b) Diagrama fasorial
Figura 10.3: Sistema bifasico y sus tensiones en el dominio del tiempo y dominiofasorial
10.3. Sistema trifasico
Si consideramos un nuevo arrollamiento dentro de nuestra maquina dis-puestos ahora los tres de forma tal que generen tres tensiones de igual am-plitud y desfasadas 2π
3 entre sı podremos obtener un sistema trifasico. Lastensiones generadas en este caso seran por ejemplo
VAA′ = V 6 90
VBB′ = V 6 − 30
VCC′ = V 6 − 150
Estos tres arrollamientos pueden ser interconectados de dos formas distintas,dando lugar a las llamadas conexion en estrella y conexion en triangulo delgenerador.
A
BC
N
VAN
VBN
VCN
VAB
VBCVCA
Figura 10.4: Esquema circuital trifasico en configuracion estrella
10.3.1. Generador en configuracion estrella
Los tres generadores anteriores pueden ser conectados entre sı por mediode un terminal, como se muestra en la figura 10.4. Esta configuracion recibeel nombre de configuracion en estrella. Como se ve, en esta configuracion sedispone de cuatro terminales llamados A, B, C y N1 de los que se obtienen
1O tambien se los suele llamar R, S, T y N , o 1, 2, 3 y N .

250 CAPITULO 10. SISTEMAS POLIFASICOS
las cuatro lıneas que forman el sistema. La tension entre cada terminal A,B o C y el terminal de neutro N es igual a la tension generada por cadaarrollamiento y son llamadas tensiones de fase, las tensiones entre cualquierade los terminales A, B o C es una tension compuesta por dos tensiones defase y son llamadas tensiones de lınea. Puede mostrarse facilmente que elmodulo de las tensiones de lınea es
√3 veces mas grande que el modulo de
las tensiones de fase. En concreto, si las tensiones de fase para este sistemason
VAN = V 6 90 (10.6)
VBN = V 6 − 30 (10.7)
VCN = V 6 − 150 (10.8)
las tensiones de lınea seran
VAB = VAN − VBN =√3V 6 120 (10.9)
VBC = VBN − VCN =√3V 6 0 (10.10)
VCA = VCN − VAN =√3V 6 240 (10.11)
En la figura 10.5 se puede ver el diagrama fasorial de esta configuracion.Notese que para arribar a estas tensiones se eligio arbitrariamente la faseinicial de los generadores, del mismo sistema trifasico se puede obtener undiagrama fasorial equivalente al de la figura 10.5 pero rotado un anguloarbitrario θ. Para poder homogeneizar la forma de representacion de lastensiones de un sistema trifasico se utiliza la convencion de elegir la fase dela tension de lınea VAB igual a cero.
VAN
VBNVCN
VAB
VBC
VCA
N
Figura 10.5: Diagrama fasorial de tensiones de un sistema trifasico de secuenciaABC
Si se observan las tensiones generadas en el dominio del tiempo, consi-derando como positiva la rotacion en el sentido antihorario, se vera que laocurrencia de los valores maximos de cada senal sigue la secuencia ABC (fi-gura 10.6). Si se invierte el sentido de giro de la maquina, o se intercambian
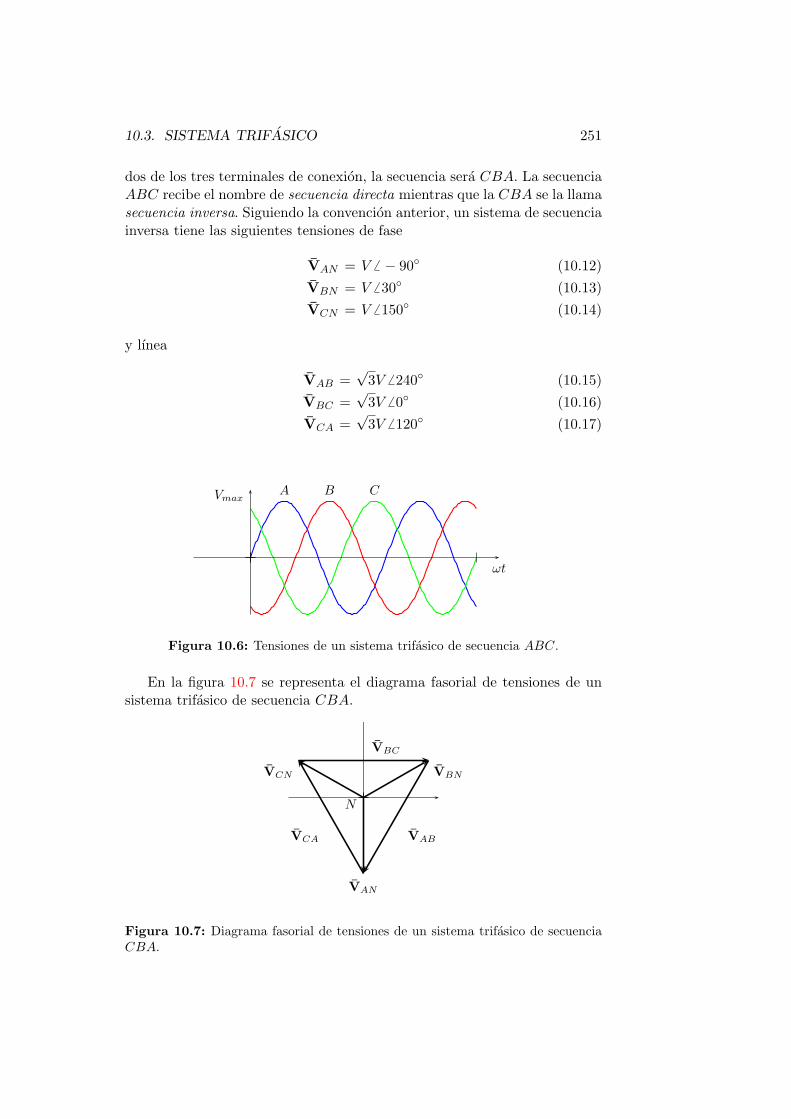
10.3. SISTEMA TRIFASICO 251
dos de los tres terminales de conexion, la secuencia sera CBA. La secuenciaABC recibe el nombre de secuencia directa mientras que la CBA se la llamasecuencia inversa. Siguiendo la convencion anterior, un sistema de secuenciainversa tiene las siguientes tensiones de fase
VAN = V 6 − 90 (10.12)
VBN = V 6 30 (10.13)
VCN = V 6 150 (10.14)
y lınea
VAB =√3V 6 240 (10.15)
VBC =√3V 6 0 (10.16)
VCA =√3V 6 120 (10.17)
A B CVmax
ωt
Figura 10.6: Tensiones de un sistema trifasico de secuencia ABC.
En la figura 10.7 se representa el diagrama fasorial de tensiones de unsistema trifasico de secuencia CBA.
VAN
VBNVCN
VAB
VBC
VCA
N
Figura 10.7: Diagrama fasorial de tensiones de un sistema trifasico de secuenciaCBA.

252 CAPITULO 10. SISTEMAS POLIFASICOS
Si observamos los diagramas fasoriales de estos sistemas trifasicos, tantosea secuencia ABC o CBA, vemos que la suma de los fasores de tensionde lınea como de fase es siempre nula (figuras 10.5 y 10.7). En generaltodo sistema de tensiones o corrientes polifasico cuya resultante sea siemprenula se lo llama sistema equilibrado. Si ademas de ser equilibrado el sistemaes simetrico, es decir que todos los fasores tienen igual amplitud y unadiferencia de fase constante, se dice que el sistema es un sistema perfecto2.Por el contrario, un sistema de tensiones o corrientes polifasico asimetrico,se lo denomina sistema deformado.
Atendiendo a la convencion de la fase nula de la tension de lınea VAB
mencionada antes, especificando el modulo de la tension de lınea y la se-cuencia del sistema, un sistema trifasico queda unıvocamente determinado.Ası por ejemplo el sistema trifasico de distribucion domiciliaria utilizado enArgentina se especifica completamente diciendo que es un sistema de tensionV = 380V , frecuencia f = 50Hz y secuencia ABC.
10.3.2. Generador en configuracion triangulo
Otra forma de interconectar los generadores es en una configuracion serie,formando un circuito cerrado, tal como se muestra en la figura 10.8. Estaconfiguracion se la denomina configuracion triangulo, y por simple inspeccionse ve que las tensiones de lınea coinciden con las tensiones de fase del sistema.
A
BC
Figura 10.8: Generador trifasico en configuracion triangulo.
Esta configuracion no es muy ventajosa ya que carece de punto neutro ypor lo tanto el sistema no puede ser conectado a tierra para su proteccion.Ademas, los arrollamientos se conectan formando un circuito cerrado, y sibien en principio se trata de un sistema perfecto cuya resultante deberıaser nula, esto puede no ocurrir en la realidad y una pequena asimetrıa enel sistema de tensiones puede derivar en una corriente compensadora muy
2Lo contrario no siempre ocurre, es decir un sistema equilibrado puede no ser perfecto,que es el caso de los sistemas sin neutro cuya componente de corriente debe ser obligato-riamente nula y en consecuencia las tensiones y corrientes en el sistema de cargas se hacenasimetricas, como se vera mas adelante

10.4. RESOLUCION DE SISTEMAS TRIFASICOS PERFECTOS 253
grande en los arrollamientos del generador que se vera limitada solo por laresistencia de los devanados, lo que traerıa aparejado serios problemas en elgenerador. Debido a esto no se utilizara esta configuracion en el generadoren los analisis de carga siguientes.
10.4. Resolucion de sistemas trifasicos perfectos
Considerando ahora un generador trifasico como el de la figura 10.4,si se conectan cargas entre los terminales A-N , B-N y C-N , las cargasquedaran interconectadas en configuracion estrella. Si en cambio se conectancargas a los terminales A-B, B-C y C-A estas quedaran interconectadasen configuracion triangulo. Si las cargas conectadas al sistema son todasiguales se dice que se trata de un sistema de cargas balanceado, sino sera unsistema de cargas desbalanceado. Cuando se conecta un sistema de cargasbalanceado a un generador trifasico se obtiene un sistema de tensiones ycorrientes perfecto. Analizaremos primero el caso de cargas balanceadas enambas configuraciones para luego estudiar los sistemas desbalanceados.
10.4.1. Cargas en configuracion estrella
Cuando se conectan cargas en configuracion estrella a un sistema trifasico(figura 10.9) las tensiones aplicadas a cada carga son las tensiones de fasedel sistema. Por lo tanto, suponiendo una carga inductiva de valor Z 6 ϕ yun sistema de tension V y secuencia ABC, por cada carga circulara unacorriente dada por3
IAN =VAN
Z 6 ϕ=
V√3Z
6 (90 − ϕ) (10.18)
IBN =VBN
Z 6 ϕ=
V√3Z
6 (−30 − ϕ) (10.19)
ICN =VCN
Z 6 ϕ=
V√3Z
6 (−150 − ϕ) (10.20)
estas corrientes son llamadas corrientes de fase y las corrientes que circulanpor cada lınea son llamadas corrientes de lınea. Se ve en el circuito de lafigura 10.9 que para esta configuracion de cargas las corrientes de lınea soniguales a las corrientes de fase
IA = IAN (10.21)
IB = IBN (10.22)
IC = ICN (10.23)
3Recordar que en la tension de fase para esta configuracion tiene un modulo√3 veces
menor al de la tension de lınea, es decir Vf = VL√3.

254 CAPITULO 10. SISTEMAS POLIFASICOS
A
BC
NN
VAN
VBN
VCN
VAB
VBC VCA
IA
IB
IC
INIAN
IBN
ICN
Z 6 ϕ
Figura 10.9: Esquema circuital trifasico con carga en configuracion estrella
La corriente por el neutro IN sera
IN = −IA − IB − IC = 0 (10.24)
es decir, el sistema de corrientes para este caso es tambien un sistema per-fecto. Si la corriente de neutro es nula como en este caso entonces el sistemapuede prescindir de la lınea de neutro, ya que esta no transporta corrientealguna, un sistema de este tipo se lo llama sistema trifasico de tres conduc-tores. En la figura 10.10 se puede ver el diagrama fasorial de tensiones ycorrientes para esta configuracion.
10.4.2. Cargas en configuracion triangulo
Si las cargas se conectan entre los terminales A-B, B-C y C-A de nuestrogenerador trifasico tendremos una configuracion triangulo (figura 10.11). Enesta configuracion la tension aplicada a cada carga es la tension de lıneadel sistema. Suponiendo entonces un sistema trifasico de secuencia ABC,tension V y una carga inductiva de valor Z 6 ϕ, las corrientes de fase vienendadas por
IAB =VAB
Z 6 ϕ=
V
Z6 (120 − ϕ) (10.25)
IBC =VBC
Z 6 ϕ=
V
Z6 (−ϕ) (10.26)
ICA =VCA
Z 6 ϕ=
V
Z6 (240 − ϕ) (10.27)
Para esta configuracion las corrientes de lınea son una composicion de lascorrientes de fase. Por trigonometrıa simple puede mostrarse que el modulode una corriente de lınea es
√3 veces mas grande que el modulo de las
corrientes de fase y su argumento se obtiene restando 30 al argumento dela corriente de fase saliente del nudo en cuestion. En el diagrama fasorial de

10.4. RESOLUCION DE SISTEMAS TRIFASICOS PERFECTOS 255
VAN
VBNVCN
IA
IB
IC
ϕ
N
Figura 10.10: Diagrama fasorial de tensiones y corrientes en una carga balanceadaen configuracion estrella
A
BC
N
VAB
VBC VCA
IA
IB
IC
ICA
IBC
IAB
Z 6 ϕ
Figura 10.11: Esquema circuital trifasico con cargas balanceadas en configuraciontriangulo
tensiones y corrientes de la figura 10.12 se puede ver esta composicion enforma grafica. Ası por ejemplo la corriente de lınea IA = IAB − ICA sera
IA =√3V
Z6 (120 − ϕ− 30)

256 CAPITULO 10. SISTEMAS POLIFASICOS
Finalmente
IA =√3V
Z6 (90 − ϕ) (10.28)
IB =√3V
Z6 (−30 − ϕ) (10.29)
IC =√3V
Z6 (210 − ϕ) (10.30)
VAB
VBC
VCA
IAB
IBC
ICA
−ICA
IA
ϕ30
N
Figura 10.12: Diagrama fasorial de tensiones y corrientes en cargas balanceadasen configuracion triangulo.
10.4.3. Calculo de potencias
Como vimos en capıtulos anteriores, la potencia activa en una cargaesta dada por P = V I cosϕ, siendo V e I los modulos de los fasores tensiony corriente en la carga y ϕ la diferencia de fase entre ellos. Veamos ahoracomo se aplica este calculo a los sistemas trifasicos con cargas balanceadas.
Cargas balanceadas en estrella
Denotemos con Vf al modulo de las tensiones de fase y con VL al de lastensiones de lınea, y con If e IL a los modulos de las corrientes de fase y lınea

10.4. RESOLUCION DE SISTEMAS TRIFASICOS PERFECTOS 257
respectivamente. En configuracion estrella la tension aplicada a cada cargaes la tension de fase cuyo modulo es en relacion al de la tension de lıneaVf = VL√
3y la corriente en las cargas es la corriente de fase cuyo modulo es
igual al modulo de la corriente de lınea, If = IL, quedando P = VL√3IL cosϕ.
Como las tres cargas son iguales la potencia total sera tres veces la anterior,es decir
PT = 3VL√3IL cosϕ =
√3VLIL cosϕ (10.31)
Procediendo de forma similar encontramos las potencias reactiva y aparenteobteniendo para un sistema de cargas balanceado las siguientes expresiones
PT =√3VLIL cosϕ (10.32)
QT =√3VLIL senϕ (10.33)
ST =√3VLIL (10.34)
notese que ϕ es el argumento de la carga Z 6 ϕ y no la diferencia de faseentre las tensiones y corrientes de lınea.
Cargas balanceadas en triangulo
En esta configuracion las cargas tienen aplicada la tension de lınea y lacorriente de fase que circula por ellas tiene un modulo
√3 veces menor al
modulo de las corrientes de lınea. Entonces las potencias por cada carga enterminos de las corrientes y tensiones de lınea sera
P = VLIL√3cosϕ (10.35)
Q = VLIL√3senϕ (10.36)
S = VLIL√3
(10.37)
y las potencias totales
PT =√3VLIL cosϕ (10.38)
QT =√3VLIL senϕ (10.39)
ST =√3VLIL (10.40)
que como vemos se calculan de la misma forma que para el caso de cargasbalanceadas en configuracion estrella.

258 CAPITULO 10. SISTEMAS POLIFASICOS
Potencia instantanea
La potencia instantanea en un sistema perfecto presenta una particu-laridad que hace de estos sistemas los mas eficientes para el transporte deenergıa. Un pequeno analisis nos permitira mostrar que su eficiencia es in-cluso mayor que la de un sistema monofasico.
Supongamos un sistema perfecto con las siguientes tensiones instantaneas
vA(t) = Vf
√2 sen (ωt) (10.41)
vB(t) = Vf
√2 sen
(ωt− 2
3π
)(10.42)
vC(t) = Vf
√2 sen
(ωt− 4
3π
)(10.43)
que al ser aplicado a un sistema de cargas balanceado en configuracion es-trella4 se originaran las siguientes corrientes
iA(t) = If√2 sen (ωt− ϕ) (10.44)
iB(t) = If√2 sen
(ωt− 2
3π − ϕ
)(10.45)
iC(t) = If√2 sen
(ωt− 4
3π − ϕ
)(10.46)
las potencias instantaneas en cada carga seran
pA(t) = 2VfIf sen (ωt) sen (ωt− ϕ) (10.47)
pB(t) = 2VfIf sen
(ωt− 2
3π
)sen
(ωt− 2
3π − ϕ
)(10.48)
pC(t) = 2VfIf sen
(ωt− 4
3π
)sen
(ωt− 4
3π − ϕ
)(10.49)
utilizando la igualdad trigonometrica senα senβ = 12 [cos(α− β)− cos(α+ β)]
las potencias instantaneas quedan
pA(t) = VfIf cosϕ− VfIf cos(2ωt− ϕ) (10.50)
pB(t) = VfIf cosϕ− VfIf cos(2ωt−4
3π − ϕ) (10.51)
pC(t) = VfIf cosϕ− VfIf cos(2ωt−8
3πϕ) (10.52)
sumando las potencias anteriores se verifica que la potencia total instantaneaes
pT (t) = 3VfIf cos(ϕ) = PT (10.53)
4Se puede arribar al mismo resultado si la configuracion de las cargas es triangulo sim-plemente transformando el sistema a uno equivalente en configuracion estrella mediante elteorema de Rosen (transformacion estrella-triangulo) que se vio en el capıtulo de Teoremas
circuitales.
10.5. RESOLUCION DE SISTEMAS TRIFASICOS DEFORMADOS 259
es decir que la potencia instantanea en un sistema perfecto es constante eigual a la potencia media total. Esto crea condiciones ventajosas respecto alfuncionamiento de las maquinas trifasicas desde el punto de vista mecanico,ya que se eliminan las vibraciones producidas por los sistemas de potenciapulsantes como el monofasico.
El sistema trifasico es el sistema perfecto que requiere menor cantidad defases y es por eso que es el sistema de distribucion de energıa mas utilizadoen el mundo. Un sistema de distribucion domiciliario trifasico sin embargono es un sistema perfecto en general, porque las cargas conectadas a el, esdecir los hogares, son cargas monofasicas diferentes que si bien se van co-nectando en forma equilibrada a cada fase, nunca puede lograrse un sistemade cargas balanceado debido a la variabilidad de las mismas. En cambioen una industria las cargas son en general balanceadas, lograndose sistemasmuy cercanos a un sistema perfecto y por ende con una alta eficiencia en eltransporte de energıa.
10.5. Resolucion de sistemas trifasicos deformados
Si las cargas conectadas al generador trifasico no son todas iguales, lascorrientes que circulan por ellas seran tambien diferentes, en modulo y/o enfase, con lo cual se tendra entonces un sistema deformado. Analizaremos acontinuacion los problemas de sistemas de cargas desbalanceados en ambasconfiguraciones, con tres y cuatro conductores.
10.5.1. Cargas desbalanceadas en estrella con cuatro conduc-tores
10.5.2. Cargas desbalanceadas en estrella con tres conducto-res
Corrimiento del neutro
10.5.3. Cargas desbalanceadas en configuracion triangulo
10.5.4. Potencia en cargas desbalanceadas
Cargas en estrella con cuatro conductores
Cargas en triangulo - Metodo de los dos vatımetros
Metodo de los dos vatımetros aplicado a cargas balanceadas

260 CAPITULO 10. SISTEMAS POLIFASICOS
Ejercitacion
1. Un sistema trifasico de 60V y secuencia directa alimenta al circuitode la fig. 10.13. Encontrar las corrientes de lınea y de fase, dibujarel digrama fasorial de tensiones y corrientes de lınea y calcular laspotencias activa, reactiva y aparente de cada fase.
A
B
C
VAB
VBCVCA
IA
IB
IC
116 30
116 30116 30
Figura 10.13: Cargas equilibradas en estrella
2. Encontrar para el ejercicio 1 la potencia instantanea p(t) = v(t) i(t)de cada fase y la de todo el sistema con ω = 2π50.
3. Un sistema trifasico ABC de 380V alimenta una carga equilibrada enconfiguracion triangulo de Z = 12 + j22Ω. Hallar las intensidades decorrientes en las lineas y dibujar el diagrama fasorial.
4. Un sistema trifasico ABC de 380V alimenta a dos grupos de cargasen configuracion estrella, conectadas en paralelo entre si. El primergrupo de cargas tiene impedancias identicas de valor Zm = 366 25Ω yel segundo tiene otras tres de valor Zn = 1066 15Ω cada una. Calcularla potencia total erogada por el sistema.
5. Un sistema trifasico CBA de 380V tiene una carga conectada entriangulo de
ZAB = 18 + j30Ω
ZBC = 10 + j25Ω
ZCA = 60Ω
encontrar las corrientes de lınea IA, IB e IC y dibujar el diagramafasorial.
6. Al siguiente sistema trifasico de tension VAB = 3806 0 y de secuenciaindirecta CBA se le conectan dos vatımetros en la lınea A y en la lıneaB como se ve en la fig. 10.14
se pide:
a. lectura de PA y PB y de aquı la potencia total
b. verificacion de la potencia total

10.5. RESOLUCION DE SISTEMAS TRIFASICOS DEFORMADOS 261
A
B
C
VAB
VBCVCA
IA
IB
IC
ZA
ZB ZC
ZA = 206 0
ZB = 506 0
ZC = 256 0O
PA
PB
Figura 10.14: Potencia en cargas desequilibradas
c. diagrama fasorial completo indicando las magnitudes que midecada vatımetro
Si utiliza el metodo del desplazamiento del neutro, como dato adicionalse tiene que VON = 52, 96 − 10, 9
7. Al siguiente sistema trifasico de tension V = 380V y de secuencia di-recta ABC se le conectan dos vatımetros como se ve en la fig. 10.15.Se pide: a. lectura de PA y PC y de aquı la potencia total. b. verifica-cion de la potencia total. c. diagrama fasorial completo indicando lasmagnitudes que mide cada vatımetro
A
B
C
VAB
VBC VCA
IA
IB
IC
ZA
ZB
ZCZA = 80ΩZB = 50ΩZC = 64Ω
PA
PC
Figura 10.15: Potencia en cargas desequilibradas
8. El circuito de la fig. 10.16 es un secuencımitro RC. Deducir el modode operacion. Construir el diagrama fasorial para secuencia directa eindirecta.
A
B
C
VAB
V
IA
IB
IC
R
Zin → ∞
C
Figura 10.16: Secuencımetro RC
262 CAPITULO 10. SISTEMAS POLIFASICOS
Soluciones
Ejercicio 1 Solucion
IA = 3,15 6 60, IB = 3,156 − 60, IC = 3,15 6 − 180
PA = PB = PC = 94,475W ,QA = QB = QC = 54,545V AR,SA = SB = SC = 109,09V A
Ejercicio 2 Solucion
pA(t) = 94, 5− 109, 12 cos(4π50 + 150)W ,pB(t) = 94, 5− 109, 12 cos(4π50− 90)W ,pC(t) = 94, 5− 109, 12 cos(4π50 + 30)W
pT (t) = 283, 5W
Ejercicio 3 Planteo y resolucion numerica
En una carga en configuracion triangulo las tensiones de fase tiene elmismo modulo que las tensiones de lınea. Para el caso de secuenciaABC y tension de sistema de 380
VAB = 3806 120
VBC = 3806 0
VCA = 3806 240
Estas son las tensiones aplicadas en cada impedancia del triangulo, lascuales determinan las corrientes en cada fase
IAB =VAB
Z= 15,1646 58,61
IBC =VBC
Z= 15,1646 − 61,39
ICA =VCA
Z= 15,1646 178,61
Las corrientes de fase sin embargo son distintas a las corrientes delınea. Para calcular las corrientes de lınea aplicamos LKC en cadanudo del triangulo
IA = IAB − ICA = 23,057 + j12,577
IB = IBC − IAB = −0,63690− j26,25649
IC = ICA − IBC = −22,420 + j13,680
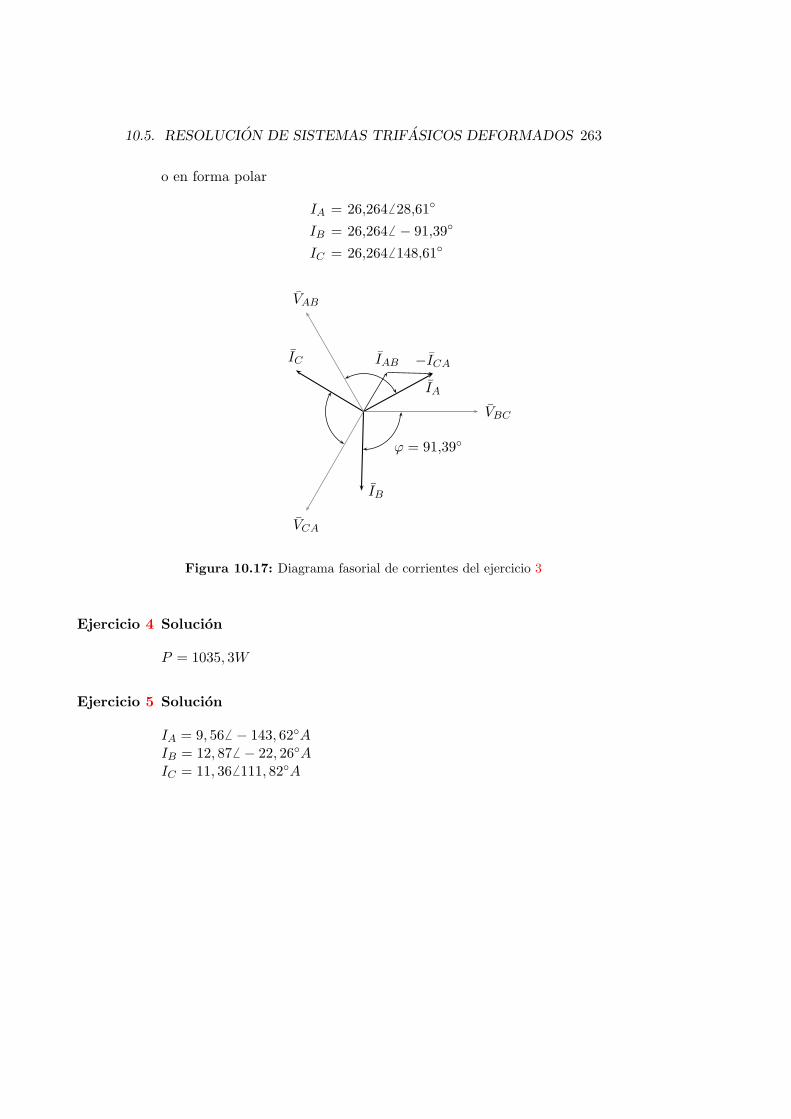
10.5. RESOLUCION DE SISTEMAS TRIFASICOS DEFORMADOS 263
o en forma polar
IA = 26,2646 28,61
IB = 26,2646 − 91,39
IC = 26,2646 148,61
IAB −ICA
IA
IB
IC
VAB
VBC
VCA
ϕ = 91,39
Figura 10.17: Diagrama fasorial de corrientes del ejercicio 3
Ejercicio 4 Solucion
P = 1035, 3W
Ejercicio 5 Solucion
IA = 9, 566 − 143, 62AIB = 12, 876 − 22, 26AIC = 11, 366 111, 82A

264 CAPITULO 10. SISTEMAS POLIFASICOS

Capıtulo 11
Aplicaciones reales
265

266 CAPITULO 11. APLICACIONES REALES
Ejercitacion
1. Para el circuito de la figura 11.1 se pide:
R1 = 2Ω
R2 = 4Ω L = 20mHv(t) = 141 cos(100t)u(t)Vi1 i2
VR
Figura 11.1: Circuito RL
a. encontrar i1,i2 y vR para todo t > 0 indicando partes transitoriay permanente de la respuesta
b. repetir aplicando transformada de Laplace
c. encontrar la funcion de transferencia y la respuesta al impulsoconsiderando la fuente de tension como entrada y vR como salida
d. encontrar la respuesta de regimen permanente de i1 y vR apli-cando el metodo fasorial y comparar con la obtenida en el puntoanterior
e. construir el diagrama fasorial completo de tensiones y corrientes
f. calcular la potencia activa de cada elemento y la potencia activatotal
g. plantear la matrız de impedancias para calcular I1 e I2 y la matrızde admitancias para calcular VR
h. calcular la impedancia de entrada V
I1y de transferencia V
I2
i. encontrar, grafica y analıticamente, el lugar geometrico de Z si ωvarıa desde 0 a ∞.
j. graficar el lugar geometrico de i1. Indicar en el grafico hacia dondese mueve la corriente cuando ω → 0 y cuando ω →∞
k. conectar un capacitor en paralelo con L y calcular el valor de lacapacidad para que el circuito entre en resonancia a la frecuenciade la fuente
l. en estas condiciones, calcular Q0

Apendice A
Ecuaciones diferenciales
Una Ecuacion Diferencial (Ec.Dif.) es una ecuacion que establece unarelacion entre una variable, una funcion incognita en esa variable y las deri-vadas de esta funcion incognita
F (t, x(t), x′(t), x′′(t), · · · , xn(t)) = 0 (A.1)
si la funcion incognita x(t) es de una sola variable la Ec.Dif. se llama ordi-naria, sino se llama Ec.Dif. en derivadas parciales.
El orden de derivacion mas alto presente en la Ec.Dif. determina el ordende la Ec.Dif.
Toda funcion x(t) que introducida en la Ec.Dif. la transforme en unaidentidad se llama solucion o integral de la Ec.Dif.
Una Ec.Dif. de n-esimo orden es lineal si la funcion incognita y todassus derivadas estan elevadas a la primera potencia (Piskunov 616)
La solucion general completa de una Ec.Dif. lineal no homogenea deorden n se expresa como la suma de cualquier solucion particular xnh(t) de lano homogenea, mas las n soluciones generales xho(t) de la Ec.Dif. homogeneacorrespondiente (Piskunov 631). Para que la solucion sea completa se debeformar con tantas soluciones generales de la homogenea como orden tengala Ec.Dif.
En la Teorıa de los circuitos la solucion particular de la Ec.Dif. no ho-mogenea representa la respuesta forzada o de regimen permanente del cir-cuito, mientras que las soluciones generales de la Ec.Dif. homogenea corres-pondiente representan las respuestas naturales o de regimen transitorio delsistema. La cantidad de respuestas naturales necesarias para representar eltransitorio de un sistema vendra dado entonces por el orden de la Ec.Dif.que lo represente.
267

268 APENDICE A. ECUACIONES DIFERENCIALES

Apendice B
Uso basico de Maxima
B.1. Maxima/wxMaxima
El sistema de algebra computacional (o CAS por sus siglas en ingles)Maxima es un motor de calculo simbolico escrito en lenguaje Lisp publica-do bajo licencia GNU GPL. Maxima esta basado en el sistema original deMacsyma desarrollado por MIT en los anos 70.
Cuenta con un amplio conjunto de funciones para manipulacion simbolicade polinomios, matrices, funciones racionales, integracion, derivacion, mane-jo de graficos en 2D y 3D, manejo de numeros de coma flotante muy grandes,expansion en series de potencias y de Fourier, entre otras funcionalidades.
Maxima funciona en modo consola, sin embargo incluye las intefacesgraficas xMaxima y wxMaxima para facilitar su uso, estos disponen demenus para acceder a los comandos disponibles de Maxima.
B.1.1. La intefaz grafica wxMaxima
wxMaxima permite crear documentos matematicos que incluyan textos,calculos y graficos. Estos documentos consisten en celdas que se representanpor un corchete en la parte izquiera de la interfaz grafica de wxMaxima;dichas celdas constan de partes como el tıtulo, texto, entrada de comandosMaxima y la salida o resultado. En la figura B.1 se muestra una celda deejemplo
El triangulo en la parte superior del corchete que delimita la celda sirvepara ocultar la celda. Una vez introducido uno o varios comandos medianteSHIFT+ENTER las entradas se hacen efectivas y cada una de ellas se representapor %i y el resultado por %o, seguidos por un numero, como
(%i58) 1 + 1;
(%o58) 2
Las lıneas terminadas con “;” indican a Maxima que muestre el resultadoy las lıneas terminadas con “$” le indican que no muestre el resultado (util
269

270 APENDICE B. USO BASICO DE MAXIMA
--> /* this is an input cell - it holds Maxima code and can be
evaluated with SHIFT-ENTER. The code entered in this cell
will be sent to Maxima when you press SHIFT-ENTER. Before
wxMaxima sends code to Maxima, it checks if the contents
of an input cell ends with a ’;’ or a ’$’ - if it doesn’t,
wxMaxima adds a ’;’ at the end. Maxima requires that lines
end with either ’;’ or ’$’.
Any output wxMaxima gets from Maxima will be attached into
the output part of the input cell. Try clicking in this cell
and pressing SHIFT-ENTER. */
/*example Maxmima code: */
print("Hello, world!")$
integrate(x^2, x);
Figura B.1: Ejemplo de celda de wxMaxima
para resultados largos).
B.2. Operaciones con Maxima
Para mantener la precision de los calculos Maxima, a diferencia de losprogramas de calculo numerico (como MATLAB, GNU/Octave, etc.) no eva-lua las expresiones como por ejemplo 1/3 o
√2 al menos que se le indique
mediante el comando float
(%i61) sqrt(2 * %pi);
(%o61)√2√π
(%i62) float(%);
(%o62) 2,506628274631001
La lınea “float( %)” es una forma abreviada de aplicar una operaciona la ultima lınea visible, el sımbolo % significa la ultima lınea. La formaexplicita para este ejemplo serıa “float( %i61)” o “float( %o61)”.
El operador : se utiliza para etiquetar numeros o expresiones, la formade uso es “nombre variable:”, por ejemplo
(%i68) radius: 10 $
(%i69) height: 100 $
(%i70) area: %pi * radius^2;

B.2. OPERACIONES CON MAXIMA 271
(%o70) 100π
(%i71) volume: area * height;
(%o71) 10000π
Maxima incluye algunas constantes utiles como el numero e que se re-presenta por %e, π representado por %pi y i =
√−1 por %i.
Funciones
Se pueden definir funciones mediante “:=” y evaluarlas
(%i75) f(x) := x^2 + a$
(%i76) f(5);
(%o76) a+ 25
(%i77) f(5), a = -5;
(%o77) 20
y funciones definidas por tramos como
f(x) =
x2 , x < 02x− 1 , 0 < x < 41− x , x > 4
(%i1) f(x):= if(x<0) then (x^2) else ( if(x<4) then (2*x - 1) else (1-x) );
cuya grafica se muestra en la figura B.2
Derivadas
Resolver derivadas
(%i54) f(x) := x^2 $
(%i55) diff(f(x), x);
(%o55) 2x
(%i56) g(y) := sin(y)$
(%i57) g(f(x));
(%o57) sin(
x2)
(%i58) diff( g(f(x)) , x);
(%o58) 2x cos(
x2)
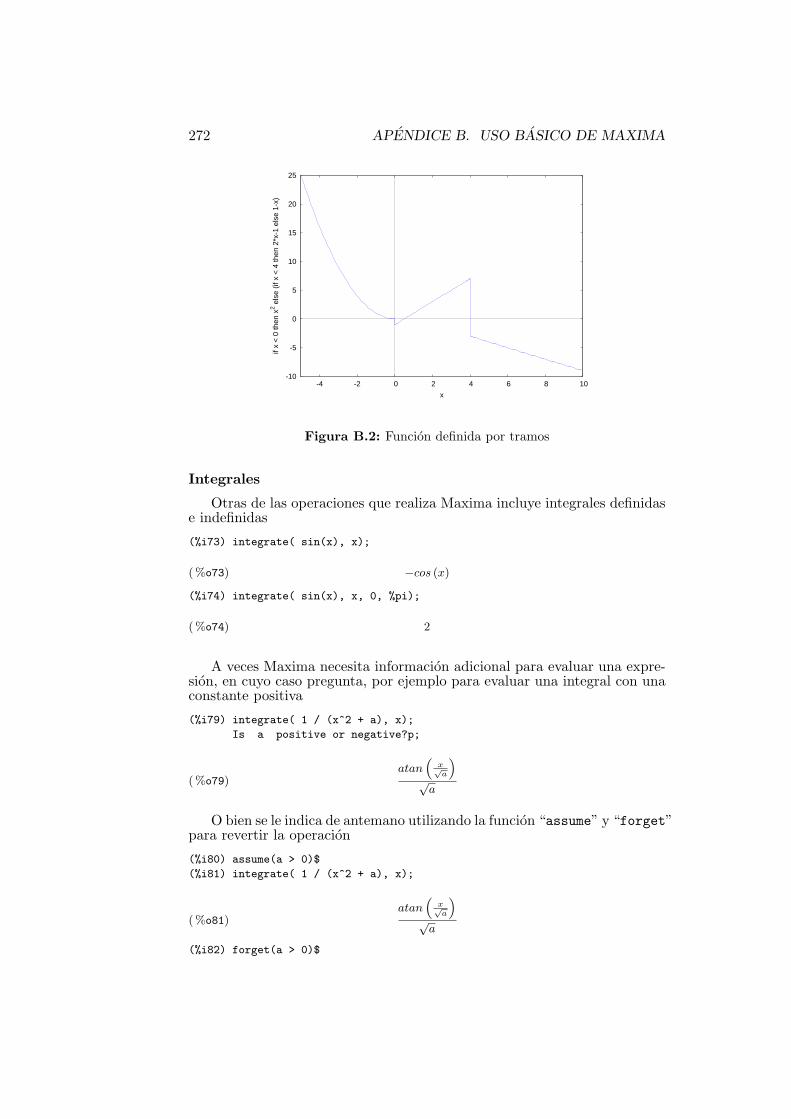
272 APENDICE B. USO BASICO DE MAXIMA
-10
-5
0
5
10
15
20
25
-4 -2 0 2 4 6 8 10
if x
< 0
then
x2 e
lse
(if x
< 4
then
2*x
-1 e
lse
1-x)
x
Figura B.2: Funcion definida por tramos
Integrales
Otras de las operaciones que realiza Maxima incluye integrales definidase indefinidas
(%i73) integrate( sin(x), x);
(%o73) −cos (x)
(%i74) integrate( sin(x), x, 0, %pi);
(%o74) 2
A veces Maxima necesita informacion adicional para evaluar una expre-sion, en cuyo caso pregunta, por ejemplo para evaluar una integral con unaconstante positiva
(%i79) integrate( 1 / (x^2 + a), x);
Is a positive or negative?p;
(%o79)atan
(
x√a
)
√a
O bien se le indica de antemano utilizando la funcion “assume” y “forget”para revertir la operacion
(%i80) assume(a > 0)$
(%i81) integrate( 1 / (x^2 + a), x);
(%o81)atan
(
x√a
)
√a
(%i82) forget(a > 0)$

B.2. OPERACIONES CON MAXIMA 273
B.2.1. Ecuaciones diferenciales
Resolver ecuaciones diferenciales de primer orden, y particularizar larespuesta asignando un valor conocido de la funcion con “atvalue”
(%i84) eq1: L*diff(i(t),t,1)+R*i(t) = V;
(%o85) i(t)R+di(t)
dtL = V
(%i86) atvalue(i(t),t=0,0)$
(%i87) desolve(eq1,i(t));
(%o87) i(t)V
R− V e−
RL
t
R
o de segundo orden
(%i96) ode2( ’diff(y, t, 2) + omega^2 * y = 0, y, t );
(%o96) y = %k1 sin (ω t) + %k2 cos (ω t)
(%i97) ic2(%, t = 0, y = A, ’diff(y,t) = 0 );
(%o97) y = Acos (ω t)
Graficos
Se pueden realizar graficos 2D o 3D
(%i98) plot2d([sin(x), cos(x)], [x,0, 2*%pi]);
(%i99) plot3d( exp(-x^2 - y^2), [x,-2,2],[y,-2,2]);
los resultados se muestran en la figura B.3 y B.4. Las funciones “wxplot2d”y “wxplot3d” insertan el grafico dentro de la celda de wxMaxima.
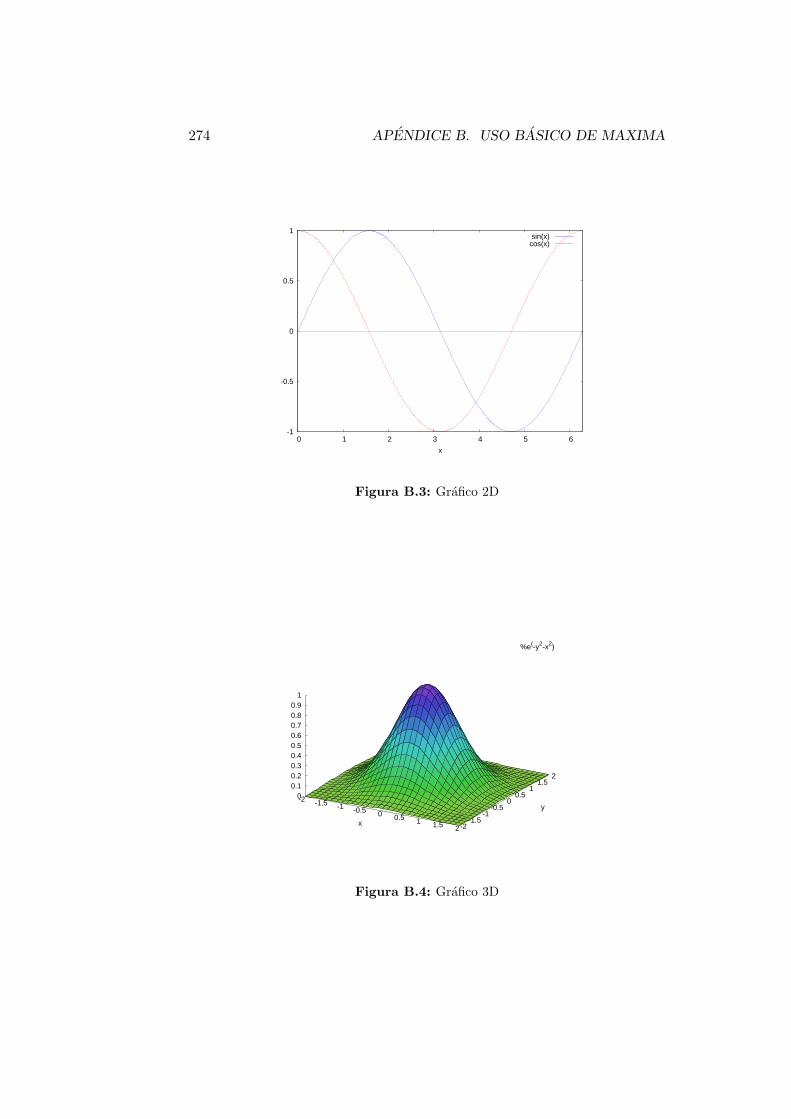
274 APENDICE B. USO BASICO DE MAXIMA
-1
-0.5
0
0.5
1
0 1 2 3 4 5 6
x
sin(x)cos(x)
Figura B.3: Grafico 2D
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-2-1.5
-1-0.5
0 0.5
1 1.5
2
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
1
%e(-y2-x2)
x
y
Figura B.4: Grafico 3D

















