23
Mechanical Vibrations Multi Degrees of Freedom System Philadelphia University Engineering Faculty Mechanical Engineering Department Professor Adnan Dawood Mohammed
| Date post: | 28-Dec-2015 |
| Category: |
Documents |
| Upload: | lambert-gilmore |
| View: | 218 times |
| Download: | 0 times |

Mechanical VibrationsMulti Degrees of Freedom System
Philadelphia University Engineering Faculty Mechanical Engineering Department
Professor Adnan Dawood Mohammed
Multi DOF system
Equations of motion:
[M] is the Mass matrix
[K] is the Stiffness matrix
[C] is the Damping matrix
F xKxCxM
1) Vector mechanics (Newton or D’ Alembert)
2) Hamilton's principles3) Lagrange's equations
They are obtained using:
Multi-DOF systems are so similar to two-DOF.
Un-damped Free Vibration: the eigenvalue problem
Equation of motion:
(2) 0
(1) ,0
:becomes 1Equation matrix. system A theKM
matrix)(unit IMM that Note .Mby (1)equation y premultipl
ly.respective snt vectordisplaceme andon accelerati theare and
ly.respective matrices Stiffness and Mass theareK and M where
1-
1-1-
AqqI
KqqM
0 qKqM
Write the matrix equation as:
in terms of the generalized D.O.F. qi

theof definition thestart with and I,-ABLet system. theof
thefrom rseigenvecto thefind topossible also isIt
. thecalled is which X shape mode
ingcorrespond obtain the we(3),equation matrix theinto ngsubstitutiBy
(5)
relation by the themfrom determined are system theof sfrequencie
natural theand thecalled areequation ticcharacters
theof roots the, (4) ,0I-A
or ZERO, toequated
tdeterminan theis system theofequation ticcharacters The
(3) 0}{I-A
becomes (2)Equation , where,
i
i
2i
i
2
matrix adjoint
reigenvecto
seigenvalue
q
i
Assuming harmonic motion:

constant) arbitrarayan by d(multiplie
qr eigenvecto theis which ofeach columns, of consistsmust
I-Amatrix adjoint that therecognize we, 0}{I-A
mode i for the (4)equation ith equation w this
Comparing system. freedom of degrees-n for the equations
n"" represents and valuesallfor valiedisequation above The
I-AI-A0
zero, isequation theof sideleft
on thet determinan then the,eigenvaluean ,let wenow If
(6) I-AI-AI-A
or ,B adj BIB
obtain, toBBby y Premultipl .B inverse
i
th
i
i
i
1-
iii
i
adjq
adj
adjI
B
adjB

Example:Consider the multi-story building shown in figure. The Equations of motion can be written as:
0
Pre-multiply by the inverse of mass matrix
(b) 0
0
)/( )/(
)2/( )2/3(
becomes (a)equation , lettingBy
)/()/(
)2/( )2/3(
/10
02/1
2
1
2
1
1
x
x
mkmk
mkmk
mkmk
mkmkAKM
m
mM
The characteristic equation from the determinant of the above matrix is

(d) 2 2
1
whichfrom (c), ,02
5
21
22
m
k
m
k
m
k
m
k
The eigenvectors can be found from Eqn.(b) by substituting the above values of The adjoint matrix from Eqn. (b) is
i
i
mkmk
mkmkIAAdj
)2/3( )/(
)2/( )/(
Substituting into Eqn. (e) we obtain:
mk
0.10.1
5.05.0
Here each column is already normalized to unity and the first eigenvector is
0.1
5.01X
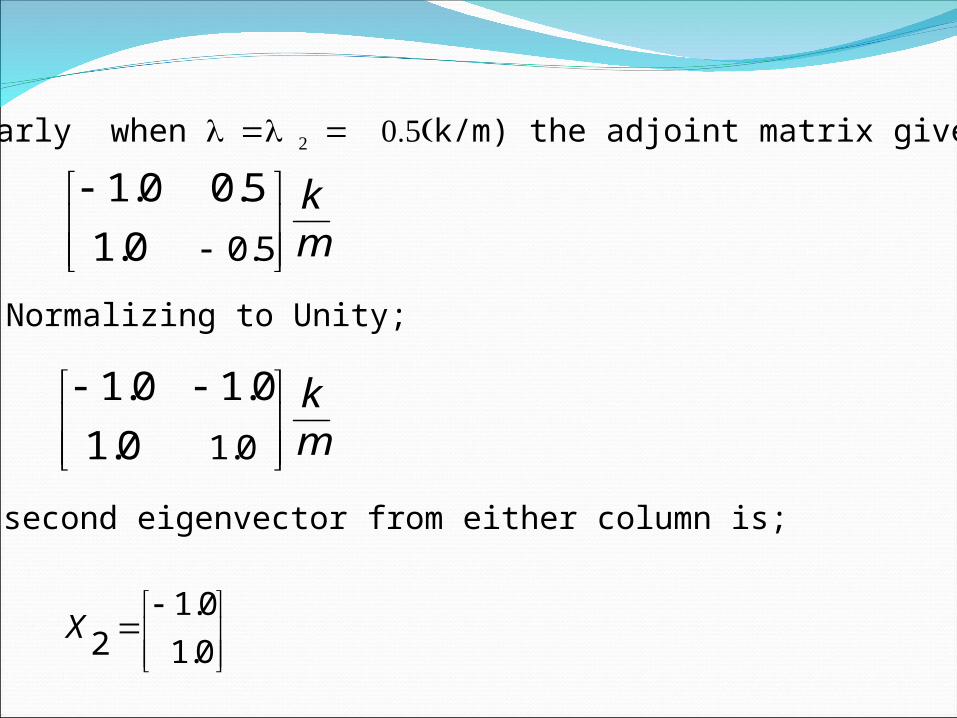
Similarly when k/m) the adjoint matrix gives;
mk
5.00.1
5.00.1
Normalizing to Unity;
mk
0.10.1
0.10.1
0.1
0.12X
The second eigenvector from either column is;
































