26
Design of Mechatronics Systems Hardware In the Loop project proposal
| Date post: | 13-Jul-2015 |
| Category: |
Education |
| Upload: | waleed-el-badry |
| View: | 138 times |
| Download: | 5 times |
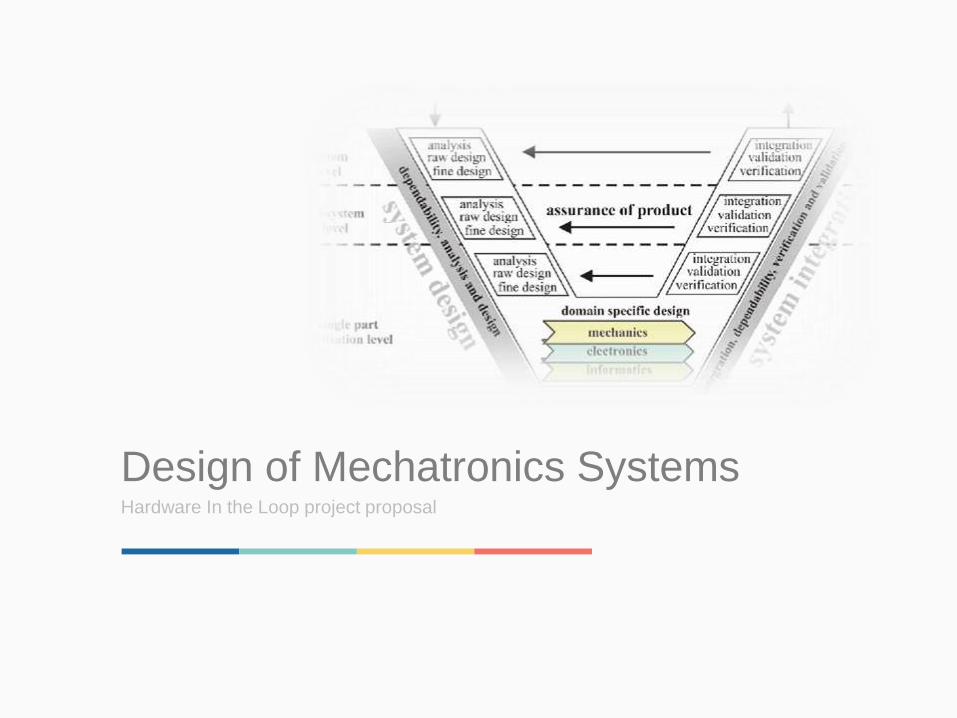
Design of Mechatronics SystemsHardware In the Loop project proposal
Presentation Outlines
01
Mission of the project Project Team Nomenclature Project Workflow Proof of Concept Demo
Implementing Hardware In the Loop design with VDI 2206 guidelines
Mission
02
You should learn how to integrate as a
gear in a bigger system rather than being
the whole system
- Dr. Mohamed Abdelaziz
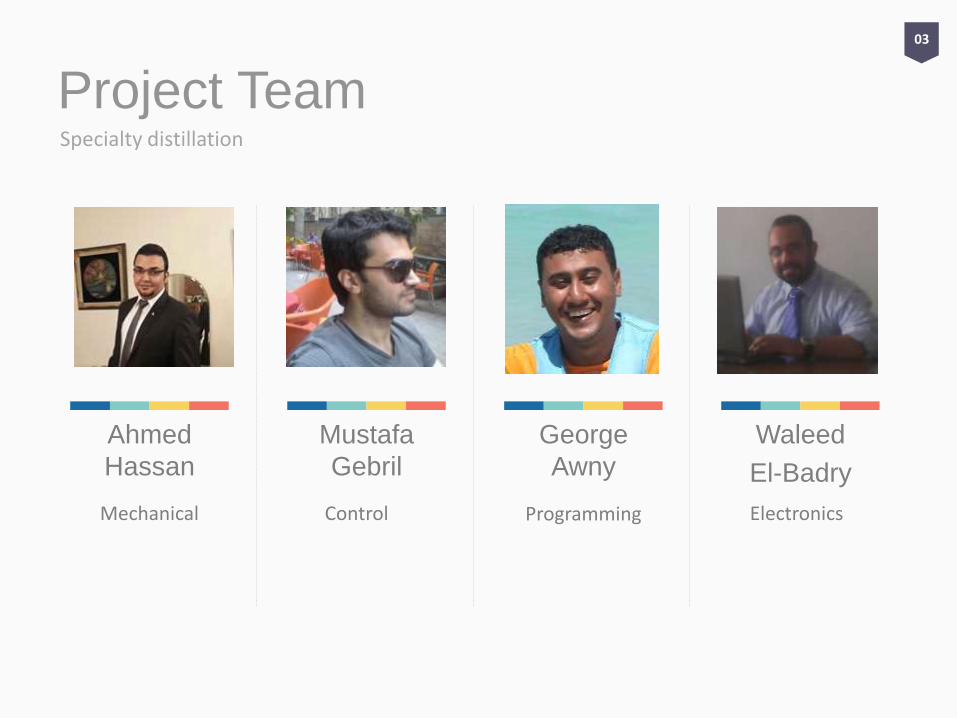
Specialty distillation
Project Team
03
Ahmed
Hassan
Mechanical
Mustafa
Gebril
Control
George
Awny
Programming
Waleed
El-Badry
Electronics
WHAT HIL is all about?
Nomenclature

Software In the LoopMechatronics Perspective
08
PID
Controller
Mechanical
Model
Final
Control
Element
Set Point
Controlled
variable

Software In the LoopMechatronics Perspective
08

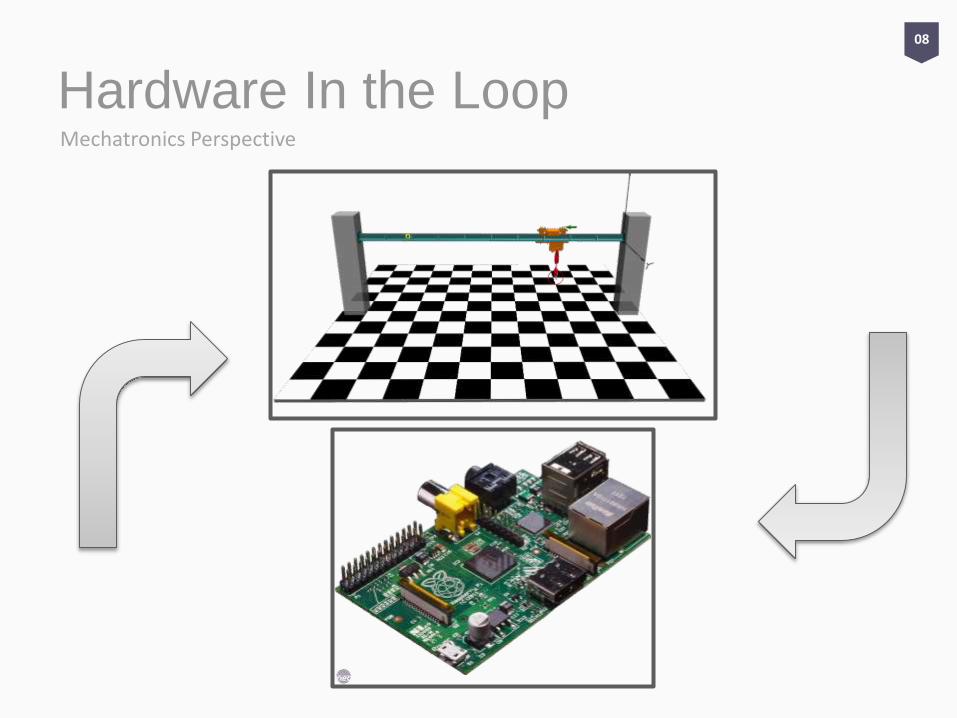
Hardware In the LoopMechatronics Perspective
08
PID Controller
(Raspberry Pi)
Mathematical
Model
Final
Control
Element
Set Point
Controlled
variable
Virtualization
Hardware In the LoopMechatronics Perspective
08

Adaptation of V-ModelTask Planning
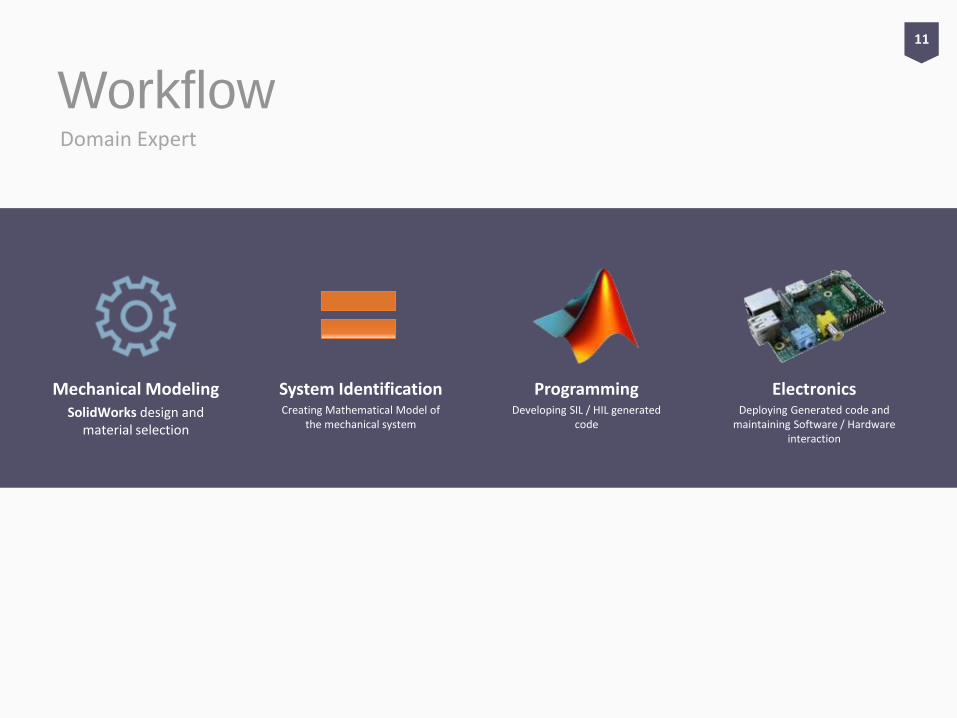
Domain Expert
Workflow
System IdentificationCreating Mathematical Model of
the mechanical system
ProgrammingDeveloping SIL / HIL generated
code
ElectronicsDeploying Generated code and
maintaining Software / Hardware interaction
11
Mechanical ModelingSolidWorks design and
material selection

Mechanical System DesignDomain Specific Stage
08
Building a single axis crane on SolidWorks.
Assigning correct mates and materials.
Exporting design to ADAMS / Simwise 4D and revalidate model if needed.
Conceptual Design
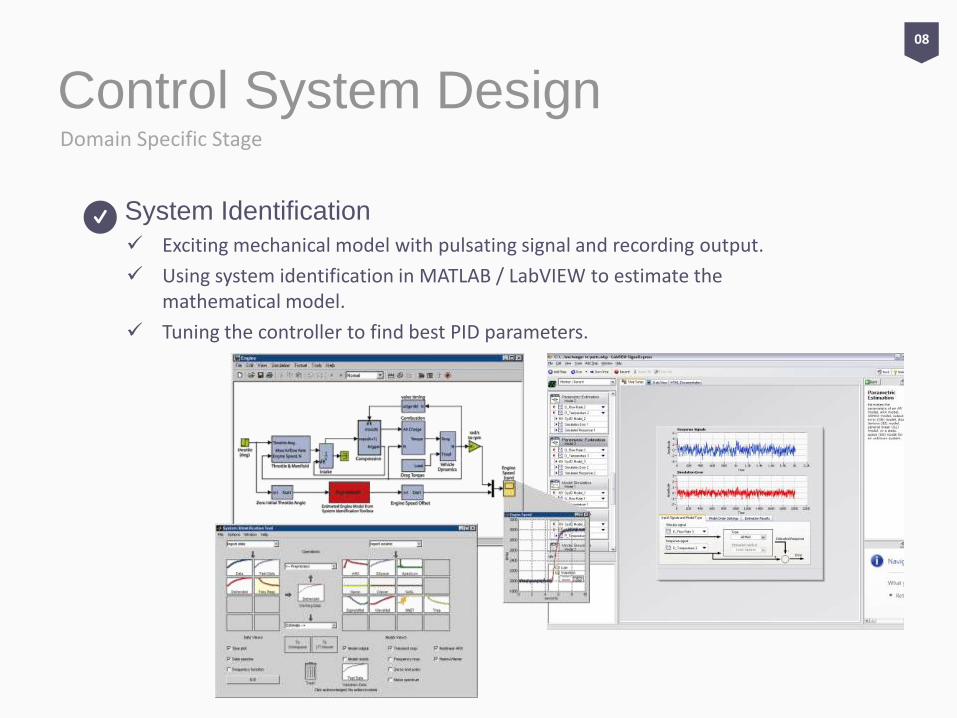
Control System DesignDomain Specific Stage
08
Exciting mechanical model with pulsating signal and recording output.
Using system identification in MATLAB / LabVIEW to estimate the mathematical model.
Tuning the controller to find best PID parameters.
System Identification
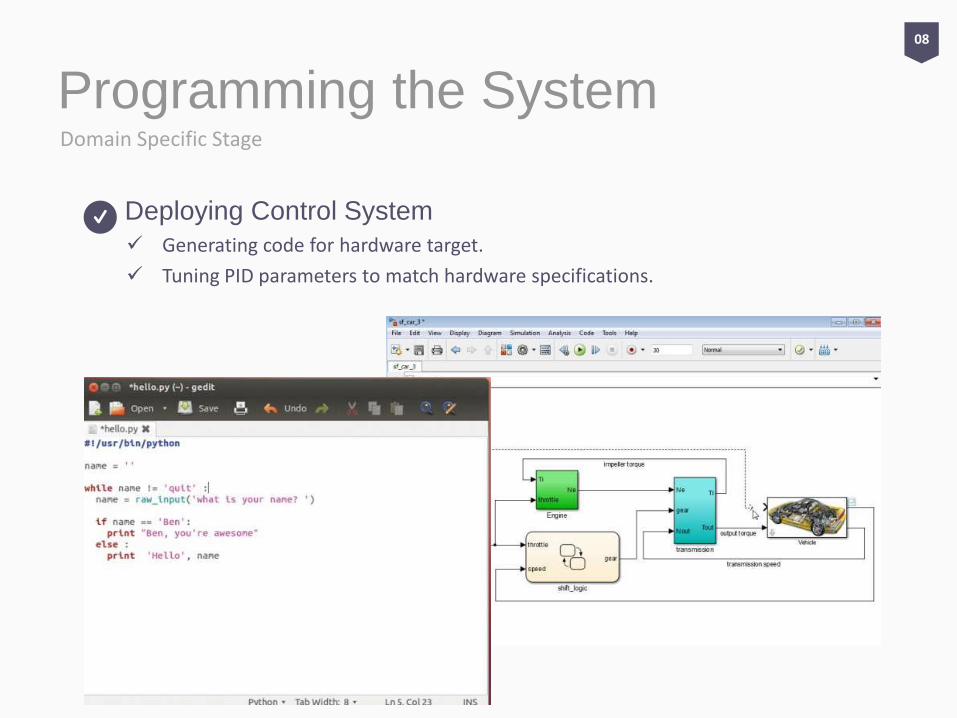
Programming the SystemDomain Specific Stage
08
Generating code for hardware target.
Tuning PID parameters to match hardware specifications.
Deploying Control System
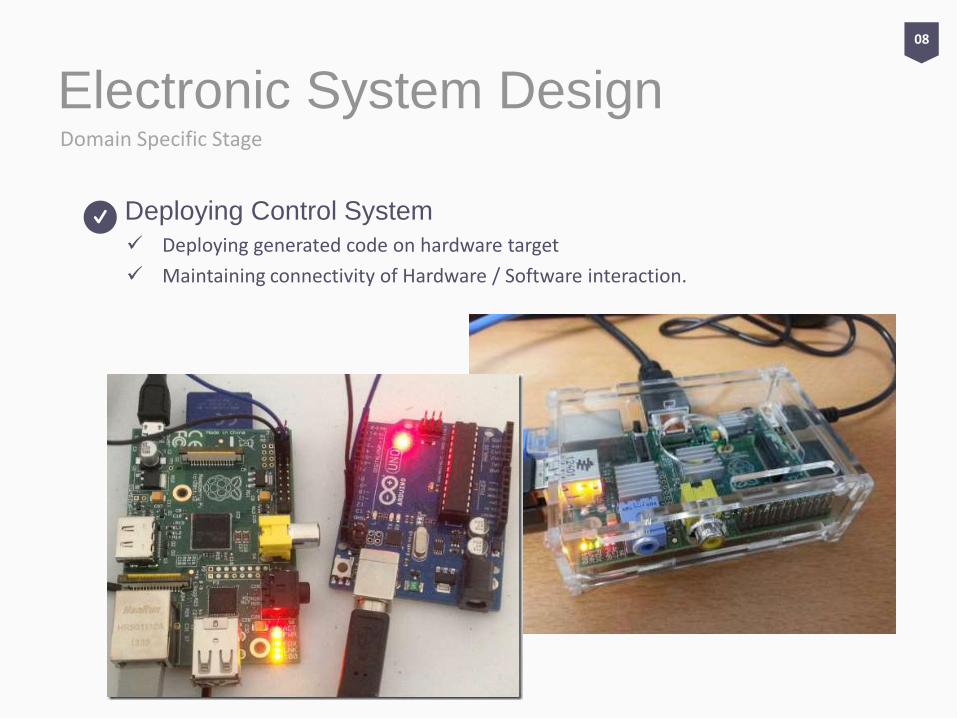
Electronic System DesignDomain Specific Stage
08
Deploying generated code on hardware target
Maintaining connectivity of Hardware / Software interaction.
Deploying Control System
Project WorkflowMechanical System
Dimensioning parts and parts
Sketching
Material selection is based on cost and avauilability
Material
selection
Assembling parts and constructing proper mates.
Parts Assembly
Using SoftMotion to test motion with respect to mating and parts
assembly
Motion Testing
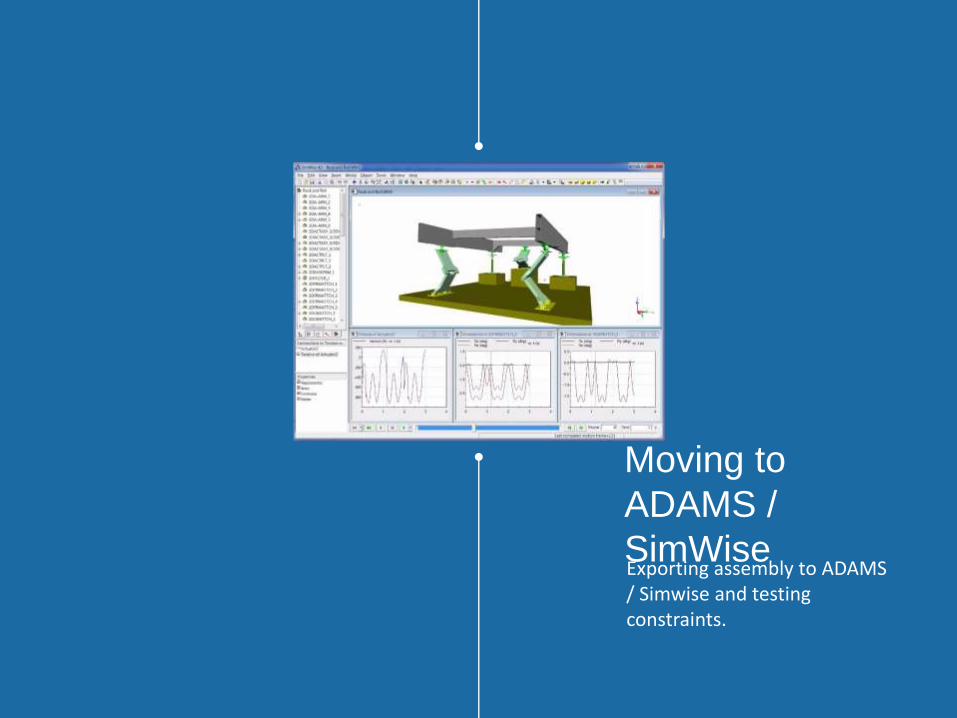
Exporting assembly to ADAMS / Simwise and testing constraints.
Moving to
ADAMS /
SimWise
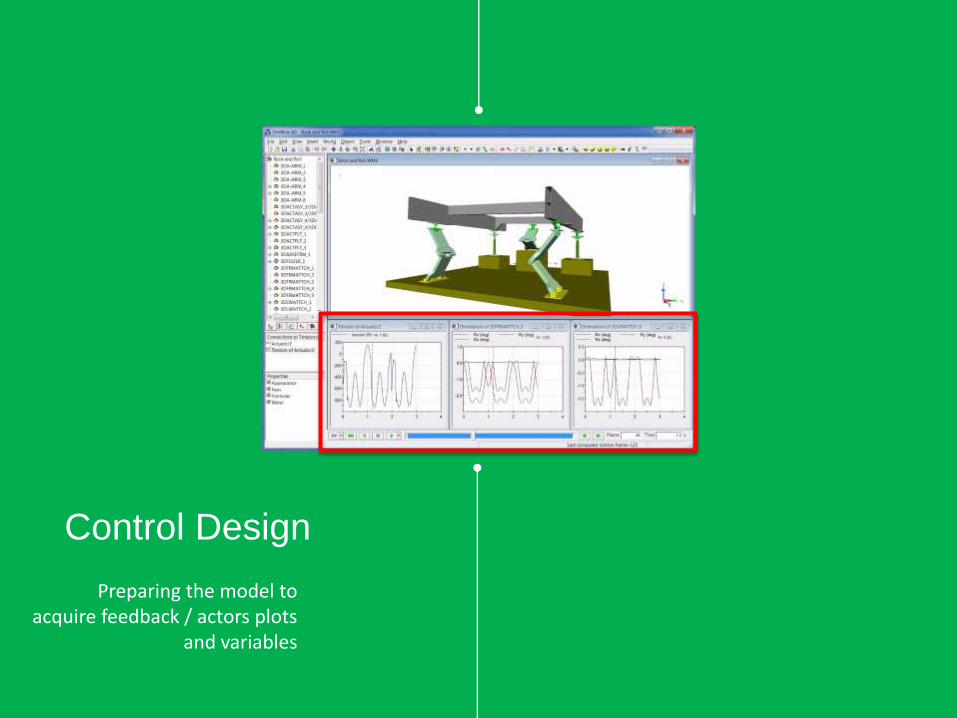
Preparing the model to acquire feedback / actors plots
and variables
Control Design

Exciting the system with pulsating input and logging I/O
Characteristics
Logging

Using System Identification to obtain mathematical model
Estimating
Model
PID Automated Tuning using MATLAB or LabVIEW
PID Tuning
Writing the code for hardware target
Code
Generation

Maintaining low level connectivity of hardware / software integration
Electronic Deployment

HOW V-Model is adapted then??
Learning each assigned domain is carried in PARALLEL
Integration is an ITERATIVE process (cross domain interaction)
Each team member will submit:• Design specification of his domain.• Gaunt chart for workflow during semester.

SIL Live Demo
Proof Of Concept


















