22
| Date post: | 14-Jan-2016 |
| Category: |
Documents |
| Upload: | aamir-riaz-malik |
| View: | 228 times |
| Download: | 1 times |


GROUP MEMBERS
Talha Ashfaq 091320005Asad Ali 081220157 Abdullah Mehmood 081120071

ABSTRACT :
This paper proposes a framework for robots, TORP (The Open Robot Project), that aims to put forward a standardization in all dimensions (electrical, mechanical and computational) of a robot shared development model.

1970’S COMPUTER AND 2000’S ROBOT

CHALLENGES IN ROBOTICS
high fragmentation lack of standardization complex projects lack of practical applications slow development

REASONS FOR THIS POOR STANDARDIZATION LEVEL
robots are built with extremely different purposes like,
a robot designed to load weight a robot for playing music private institutions privacy Standardization New year new technology

SOLUTION
TORP
The open robot project

FRAMEWORKS CONCERNS
Standardization in electrical and mechanical dimensions that allow the interchangeability of robot parts with flexibility in technologies.
Availability of software tools, like graphical interfaces, robotics optimized routines, network communication framework, sensor data transfer.
Major concern of today robotics frameworks represents only one of the three robotics dimensions, and quicker developments in the robotics field.

ROBOTICS DEVELOPMENT AND RESEARCH PRINCIPLES
Project paradigm is shifted from components level to functional self-contained modules level.
Modules are externally standardized in three dimensions: electrical, mechanical and computational but are internally technology independent.
Main controller may operate remotely according to previous robotics operating systems principles.
As the principles being adopted in PC’s since technology of the buses, pugs, power sources.

HUMANOID ROBOT PROJECTS

ASIMO

HRP-2

In order to perform human like actions, it is natural to expect that humanoid robots approximate humans in several aspects like size, mass, torque, velocity

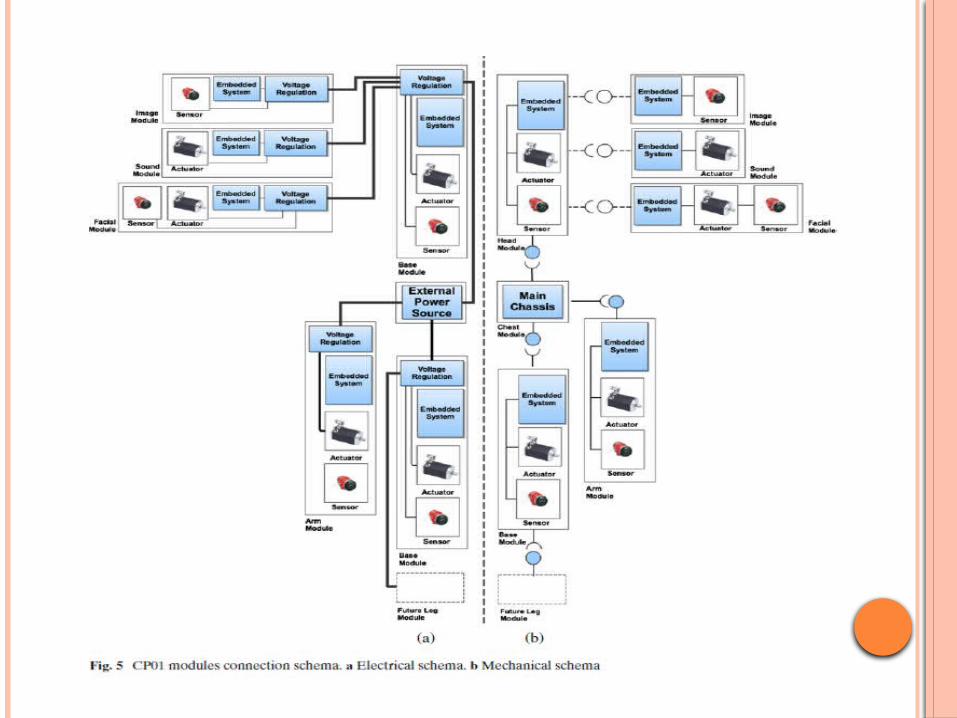
COMMUNICATIONAL PROTOCOL : To allow the communication among the
modules, a communication protocol is established.

In this structure, each module with its native processor unit is linked to the others through a network such as Ethernet, CAN, etc.
In the protocol, every time a new module is plugged into the system it has to be registered in the network. Then, a connection to the main controller is established and data can be sent following the TORP protocol.

Types of messages that can be communicated :
1. CHECKIN ( sent when module plugged in network )
2. ACTION ( sent from main controller module to perform an action )
3. GETSTATUS ( sent by the main controller sensor in order to acquire information regarding its readings )
4. STATUS (sent by a sensor or actuator that contains sensors the controller any time a GETSTATUS message is received )
5. SETCONF (sent by the controller a sensor or actuator in order to change its operating mode, return type, etc )
6. CONF ( sent by the sensor or actuator the controller in order to respond to a SETCONF message )
7. CHECKOUT ( sent by the module when it is plugged off )

APPLICATIONS OF TORP : The application of the electrical, mechanical
and computational standards proposed allow the new system to become reconfigurable, modular and interchangeable, at the cost of additional hardware and software layers.
Example : Adding omnidirectional wheels to Wheeled Robots, just need the body module adjustment rather than vision and laser modules.

APPLICATIONS ( CONTINUED )

Figure above presents the CAD design of CP01 robot, first robot implemented based on the TORP specification set.

RESULTS :
Although the work to setup a robot project to the TORP specification set is hard, the advantages that overcome this initial trouble are tremendous
The re-use of hardware and software parts in new robots or versions is an easy task if the robots belong to the same TORP family
Moreover, the modular architecture provides an easy way to compare parts of robots.





![IEC-61850 MMS OPC Device Driver Manual - ReLab … · · 2014-09-05IEC-61850 MMS OPC Device Driver Manual 2 ... IEC 61850 OPC ITEM(S) ... [Presentation access point] ...](https://static.documents.pub/doc/80x56/5b04795c7f8b9a41528c8de6/iec-61850-mms-opc-device-driver-manual-relab-mms-opc-device-driver-manual.jpg)





![NTHMP/MMS Workshop: Tsunami Currents Meeting Notes€¦ · Introduction: MMS co-chairs, Rick Wilson & Kara Gately . Purpose and Goals of Workshop [Wilson] - Presentation File . Purpose:](https://static.documents.pub/doc/80x56/6030403c5a65a1241d10c86e/nthmpmms-workshop-tsunami-currents-meeting-notes-introduction-mms-co-chairs.jpg)





