1
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
3D
S.C
OM
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n | 2
014-
04-0
6 | r
ef.:
3DS
_Doc
umen
t_20
13 Modelica Evolution – From My Perspective
Hilding Elmqvist
2
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
Bond Opening
3
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
Cliffhanger
4
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
FMI
5
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
Simnon – 1972-1976 Continuous and Discrete Time
6
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
New Inspiration
Sture Lindahl: A Nonlinear Drum, Boiler – Turbine Model, March 1976
Using Simnon
Showed that Simnon was not adequate for physical modeling
7
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
Observations
Object oriented model structure
Manually solving linear systems of equations
Manual derivation of solutions of certain nonlinear equations
Manual “index reduction”
Unrolling Newton-Raphson algorithm 3 times
What if a tool could do all this
11
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
Dymola – Dynamic Modeling Language
The Idea: Thursday, April 15 before Easter 1976
Equations!
Leading to:
Object oriented
Physically oriented coupling
Structural analysis by graph theory
Computer algebra
Boiler model coded in 8 pages
250 equations
11 systems of simultaneous equations
The largest 17 equations
12
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
Dymola program
Wrote Dymola compiler in Simula language in beginning of 1978
Structural analysis by graph theory
Own computer algebra algorithms
Dissertation in May 1978
Stopped working on this 1978
Could ONLY handle 250 equations
In about 128 kByte of memory on Univac-1108
Later translated to Pascal for VAX
17
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
1992-2006 Resumed Dymola work in 1992
Francois Celliers book Continuous Systems Modeling dealing with Dymola
Windows 3.0 got linear address space (no 640 kByte barrier)
Founded Dynasim AB 1992
Started collaborating with Martin Otter, DLR summer 1992
Introduced hybrid features in Dymola 1993 with Martin Otter and Francois Cellier
Toyota started to use Dymola in 1996 for Prius development
Started Modelica effort 1996, chairman until 1999
Dassault Systèmes acquired Dynasim in 2006
18
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
Martin Otter, DLR Per Sahlin, Brisdata/Equa Bernt Nilsson, Lund University
Alexandre Jeandel, Gaz de France Sven Erik Mattsson, Lund University
Hilding Elmqvist, Dynasim/DS
First Modelica Design Meeting, Lund, September 1996
19
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
Sven Erik Mattsson, Dag Brück, Hilding Elmqvist, Hans Olsson
Dynasim team 1999
20
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
23
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
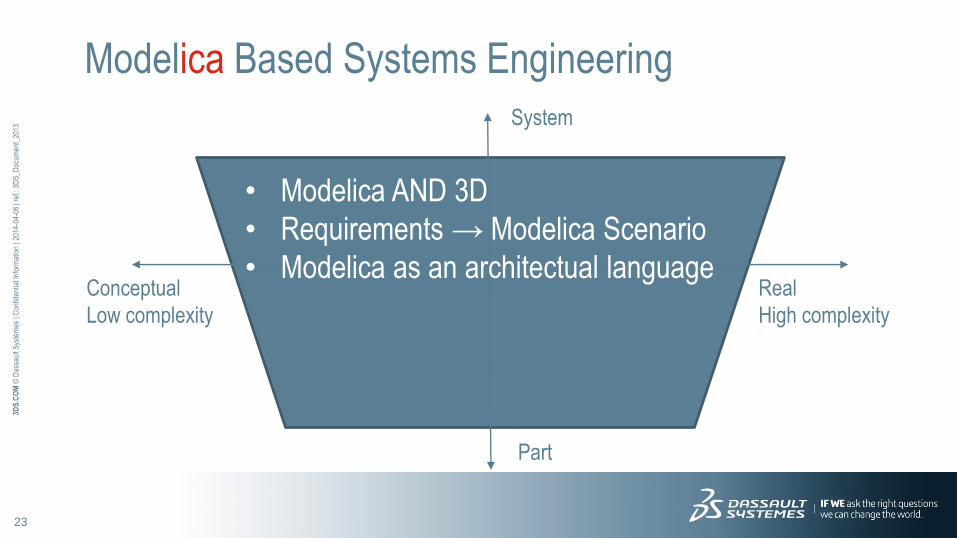
Conceptual
Low complexity
System
Real
High complexity
Part
• Modelica AND 3D
• Requirements → Modelica Scenario
• Modelica as an architectual language
Modelica Based Systems Engineering
24
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
Engineering activities
Vehicle
Linkage
Part
Concept Studies Modelica/VDL Multibody Parts and Mechanisms FEA
Suspension
Integrated System Requirements Scenario
Double
lane
change
on
normal
road in
70 km/h
25
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
Engineering activities - Red wire
Vehicle
Linkage
Part
Concept Studies Modelica/VDL Multibody Parts and Mechanisms FEA
Suspension
Integrated System Requirements Scenario
Double
lane
change
on
normal
road in
70 km/h
26
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
Vehicle
Linkage
Part
Suspension
Simulate
Optimize Simulate
Topology
Optimization
Forces
Part Design Hard Points
Kinematic
skeleton
FEA
Design Process for suspension design
SID Body Simulate Integrate
Add parts and
force elements
27
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
Concept Studies Use Tabular Suspension Characteristics
Frequency analysis
Simulate
Simulation
28
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
Determine Suspension Hardpoints Start with Tabular Suspension Characteristics
Determine Linkage Hardpoints by Optimization
Stroke
Camber
Optimize
29
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
Double Lane Change Maneuver and Braking Record forces on A-arm
Define load cases
Forces acting on the lower ’A’ arm
30
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
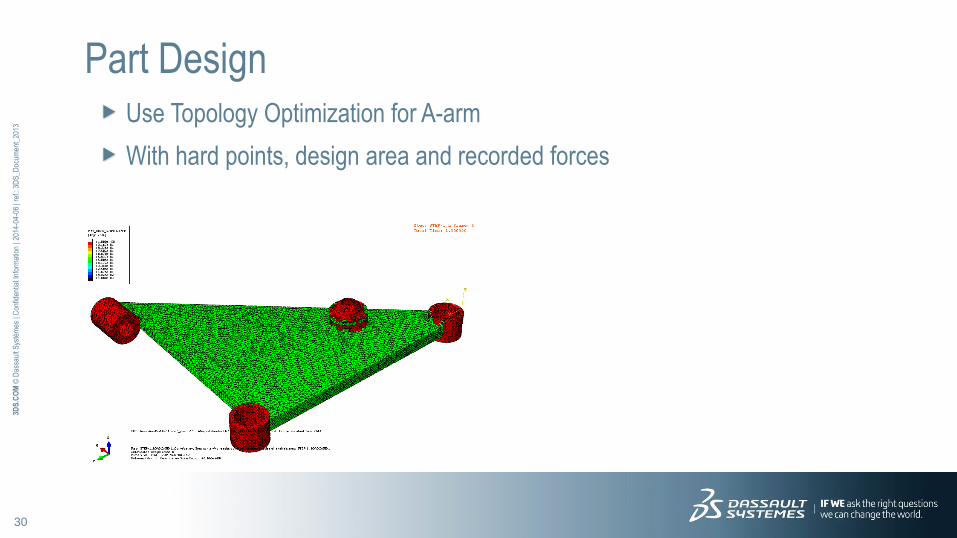
Part Design Use Topology Optimization for A-arm
With hard points, design area and recorded forces
31
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
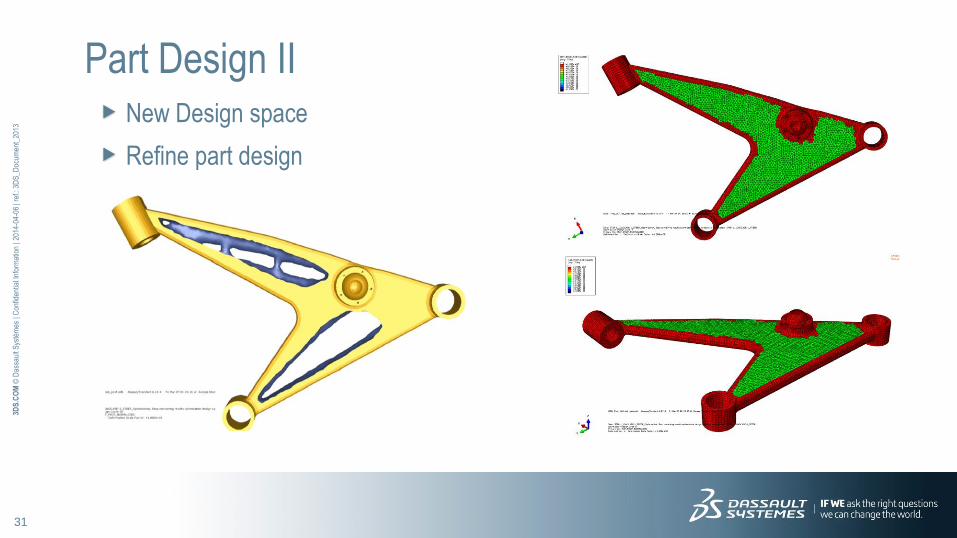
Part Design II New Design space
Refine part design
34
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
Topology Optimization in other domains
Design space
Outflow 1
Inflow
36
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
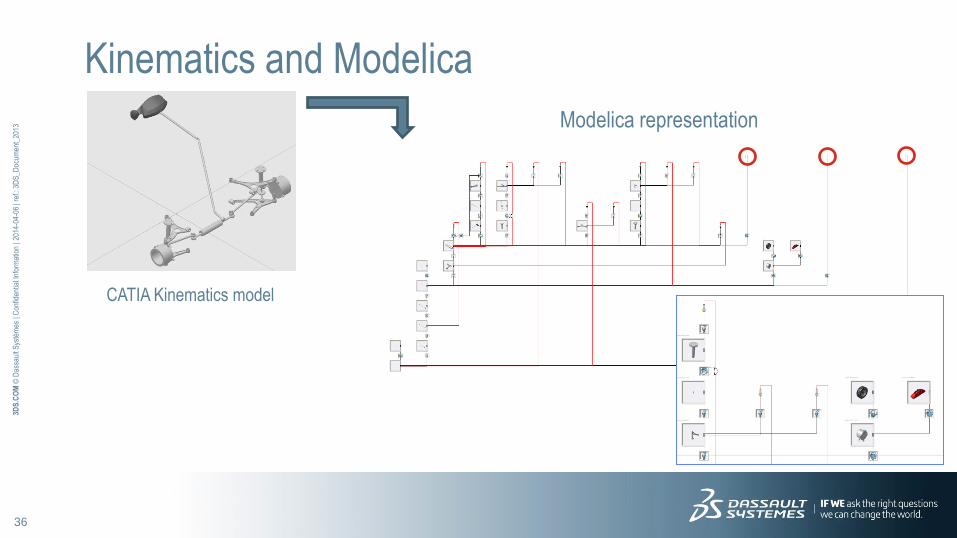
Kinematics and Modelica
CATIA Kinematics model
Modelica representation
39
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
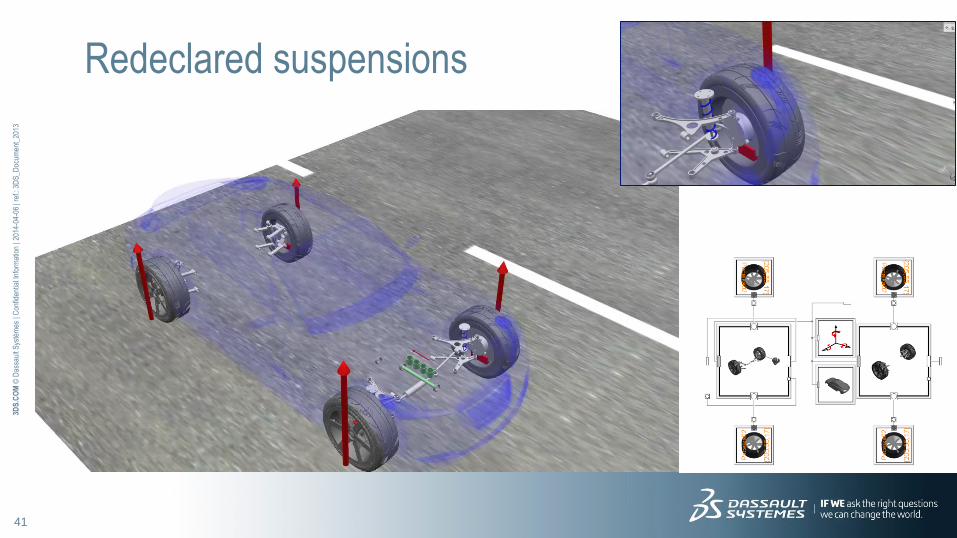
Suspension model is put in a standard VDL interface
Hubs, suspension frame and the
steering are connected to the
standard VDL interface connectors
41
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
Redeclared suspensions
44
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
FEA of Parts Record forces on A-arm
Double Lane Change Maneuver and Braking
Apply these as external loads for FE analysis
Forces acting on the lower ’A’ arm
46
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
The car Bleu
48
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
Simulation of Vehicle with Linkage Suspensions Bushings → stiff model
150 DOF (Degree of freedom)
Real-time – 1 ms step size
Inline Implicit Euler method
Parallelization
Decoupling of left/right and front/rear
Speed-up: 1.5
Parallelization
Speed-up: 2.8 on 4 cores
CPU time/step: 0.3 ms
49
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
Parallelization for many cores BLT gives one block execution order
Utilize zeros below diagonal
Compress vertically
BLT structure
Initial parallel schedule
50
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
Parallelization
Parallel schedule with cost
Gantt chart for 4 section schedule
Parallel schedule with max 4 sections
• speedUpFactor = 7.0
• numberOfLayers = 15
• numberOfCores = 325
• speedUpFactor = 3.7
• numberOfLayers = 6
• numberOfCores = 4
51
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
FMI Some people think that FMI is appropriate for object oriented modeling
It supports traditional block oriented modeling!
It is intended for representing sub-systems with input/output causality
Binary code → Symbolic processing not possible
Traditional Cosimulation ”considered harmful”
No error control
No event handling
FMI 2.0 Cosimulation
Error control possible
Interface Jacobain based Co-simulation
FMI 2.1
Acausal, structured connectors
DAE formulation
HybridCosimulation with event handling
FMI
52
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
Cosimulation master with error control Interface Jacobian-based Co-Simulation (IJCSA)
8 cosimulation FMUs
6 axis systems with electrical circuit
Inertia on both sides of interface
Phi1
Error
Macro step size
53
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
Lively Objects (Live Objects, Smart Objects already used)
We need to promote reuse and become fully object oriented with
• Multi faceted aspects (requirements, functional, different possible implementations, shape, material, dynamic behavior, etc)
• Dynamic behavior representations with different level of detail (lumped, 1D finite volume, reduced models, FE etc)
• Intelligent and adaptable
• Parametric (both numeric and structural parameters)
• Includes needed local control systems to be embedded
• To have multiple views or abstractions (3D, 2D, mathematical, relational graphs, plots, tables, GUI, SYSML views, etc)
• Optimizing capabilities
• Self testing capabilities
• Manufacturing procedures
• Etc
55
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
Vision or Dream Combination of standards:
Modelica
XML representation of Modelica (MA working group exists)
FMI
Binary representation of subsystem models (for direct execution)
Neutral 3D standard, for example STEP AP 242
Mechanical, electrical, piping
Parametric
Kinematic
Need to define relations
Coordinate systems, sensors, actuators, bidirectional parametrization, etc.
56
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
Grand Finale
57
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013
Thank YOU
Martin Otter Francois Cellier Dag Brück
Hans Olsson Sven Erik Mattsson
Sture Lindahl
Peter Fritzson Mike Tiller
Karl Johan Åström
Yutaka Hirano
Georg Grübel
for a Fantastic Collaboration
Philippe Laufer
Francois Bichet Dan Henriksson
Ulrika Wiklund
Ulf Nordström
Ulf Wiström
Karl Wernersson Peter Nilsson
Martin Malmheden
Toheed Ghandriz
Carl Fredrik Abelson
Roger Larsson
Iréne Lind Elmqvist
Johan Andreasson
Jonas Eborn
Hubertus Tummescheit
Magnus Gäfvert
58
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 201
4-04
-06
| ref
.: 3D
S_D
ocum
ent_
2013