MoteTrack: Robust, Decentralized Approach to RF-based Location Tracking Konrad Lorinz and Matt Welsh Harvard University, Division of Engineering and Applied Sciences Presented by: Sarat Chandra Subramaniam
Transcript
MoteTrack: Robust, Decentralized Approach to RF-based Location Tracking
Konrad Lorinz and Matt Welsh
Harvard University, Division of Engineering and Applied Sciences
Presented by: Sarat Chandra Subramaniam
Why Track? Awareness of context (localization) adds
tremendous value.
In sensor networks, physical location of event is very important.
Focus Application 1: Disaster Response
Focus Application 2: Emergency Medical Care
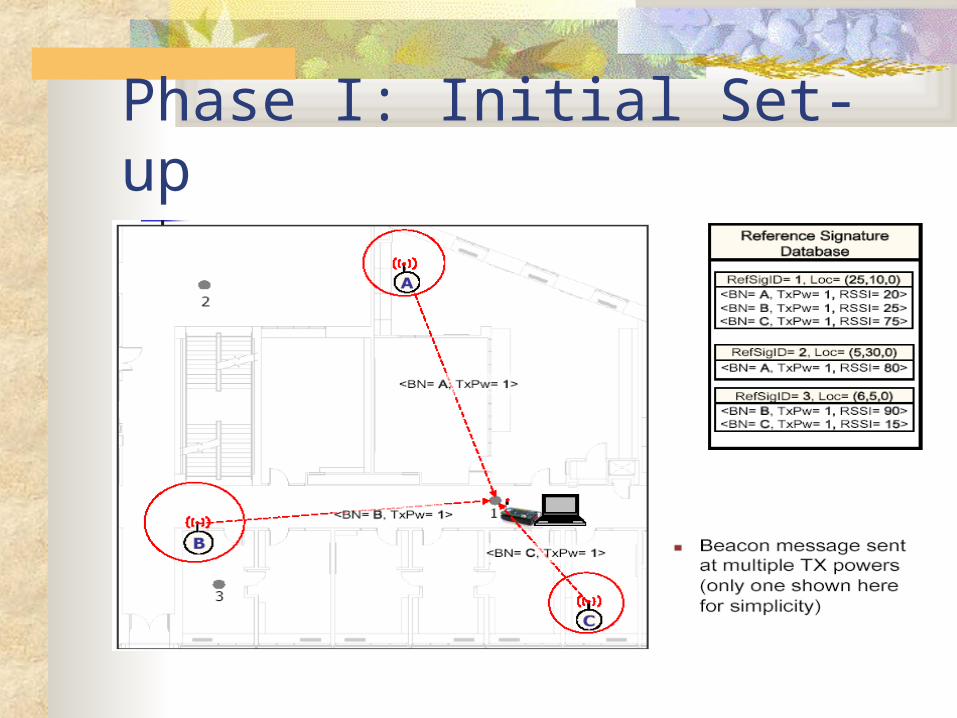
Tracking using radio: RADAR* Key idea: Signal Strength matching. Inputs:
Radio Map. Building Layout.
Offline cailbration: Tabulate <location, SS> information
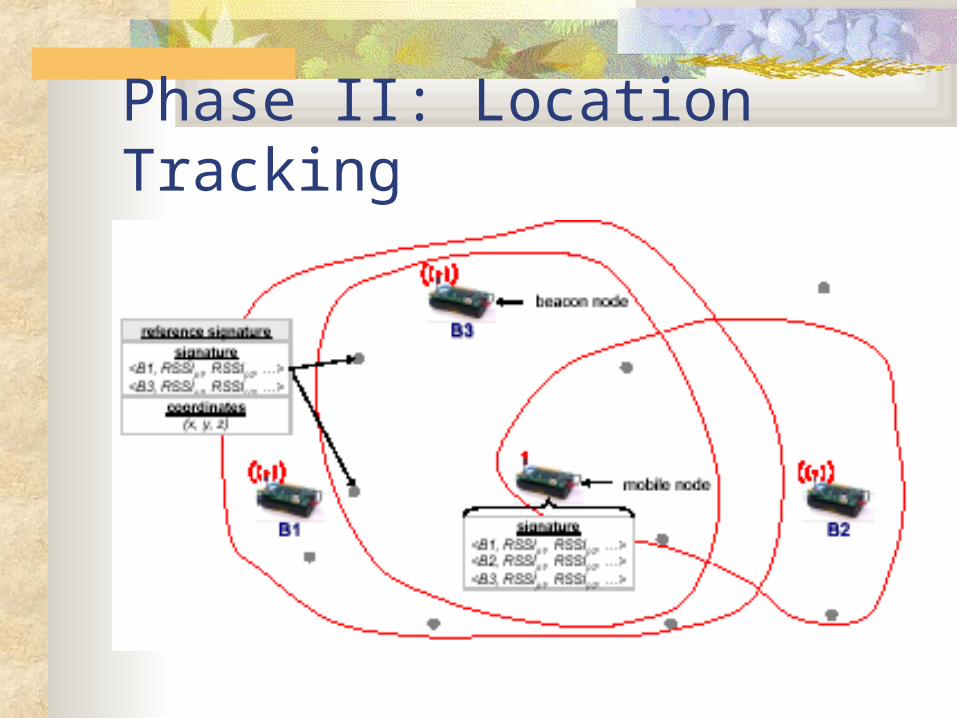
Real-time location & tracking: Find best match to measured SS in table.