55
MS&E 211 Quadratic Programming Ashish Goel
| Date post: | 14-Dec-2015 |
| Category: |
Documents |
| Upload: | candace-springfield |
| View: | 219 times |
| Download: | 1 times |

MS&E 211Quadratic Programming
Ashish Goel

A simple quadratic program
Minimize (x1)2
Subject to:-x1 + x2 ≥ 3
-x1 – x2 ≥ -2

A simple quadratic program
Minimize (x1)2
Subject to:-x1 + x2 ≥ 3
-x1 – x2 ≥ -2
MOST OPTIMIZATION SOFTWARE HAS A QUADRATIC OR CONVEX OR NON-LINEAR SOLVER THAT
CAN BE USED TO SOLVE MATHEMATICAL PROGRAMS
WITH LINEAR CONSTRAINTS AND A MIN-QUADRATIC OBJECTIVE
FUNCTION
EASY IN PRACTICE
A simple quadratic program
Minimize (x1)2
Subject to:-x1 + x2 ≥ 3
-x1 – x2 ≥ -2
MOST OPTIMIZATION SOFTWARE HAS A QUADRATIC OR CONVEX OR NON-LINEAR SOLVER THAT
CAN BE USED TO SOLVE MATHEMATICAL PROGRAMS
WITH LINEAR CONSTRAINTS AND A MIN-QUADRATIC OBJECTIVE
FUNCTION
EASY IN PRACTICEQUADRATICPROGRAM
Next Steps
• Why are Quadratic programs (QPs) easy?
• Formal Definition of QPs
• Examples of QPs
Next Steps
• Why are Quadratic programs (QPs) easy?– Intuition; not formal proof
• Formal Definition of QPs
• Examples of QPs– Regression and Portfolio Optimization
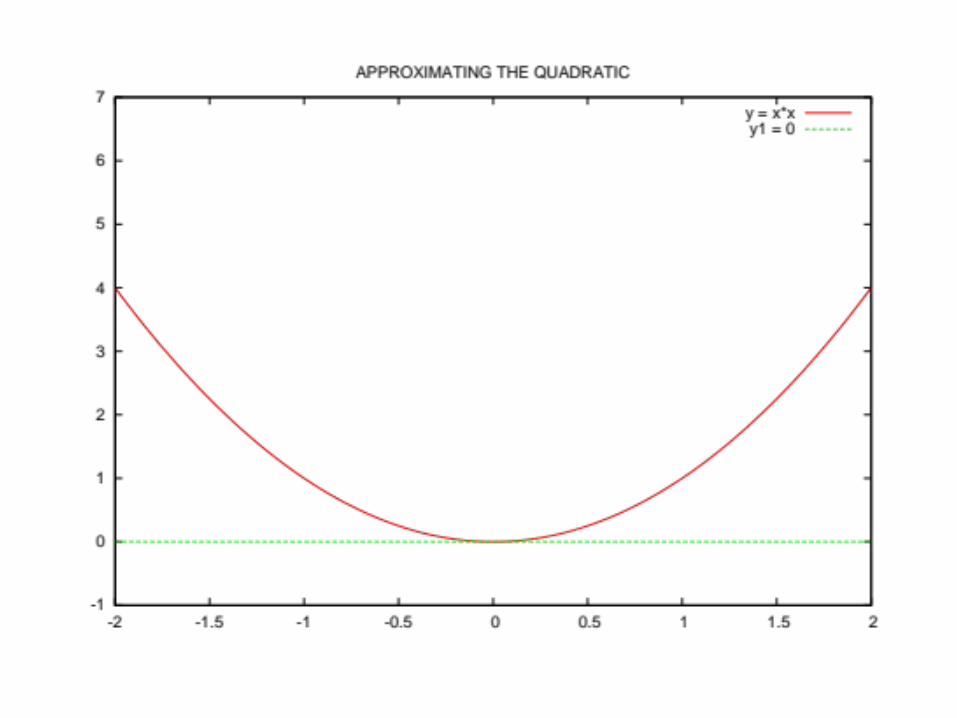
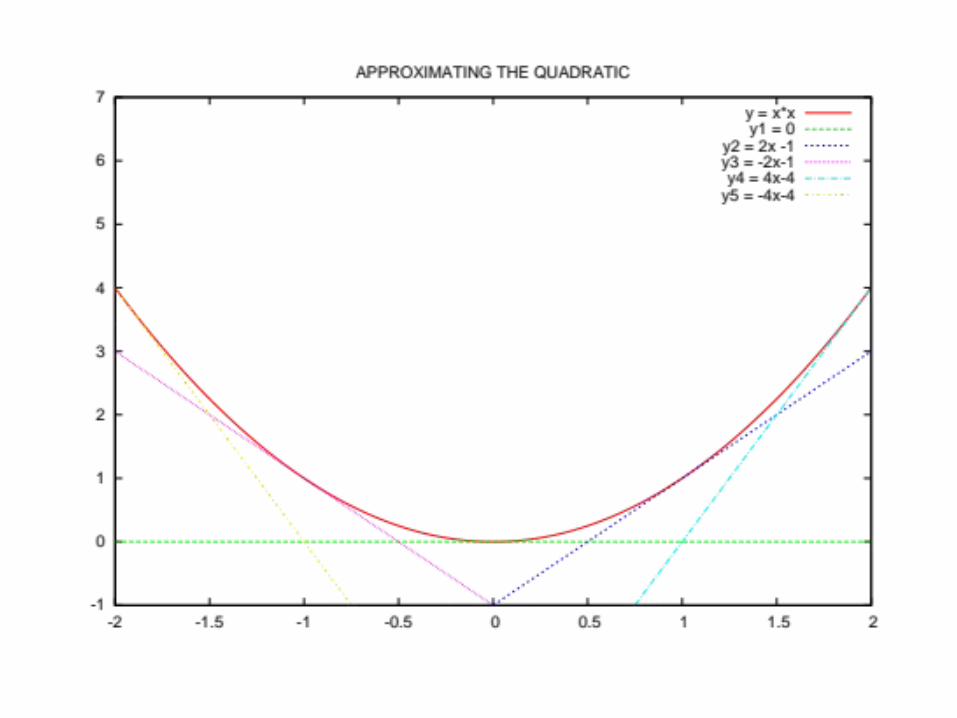
Approximating the Quadratic
Approximate x2 by a set of tangent lines (here x is a scalar, corresponding to x1 in the previous slides)
d(x2)/dx = 2x, so the tangent line at (a, a2) is given by y – a2 = 2a (x-a) or
y = 2ax – a2
The upper envelope of the tangent lines gets closer and closer to the real curve




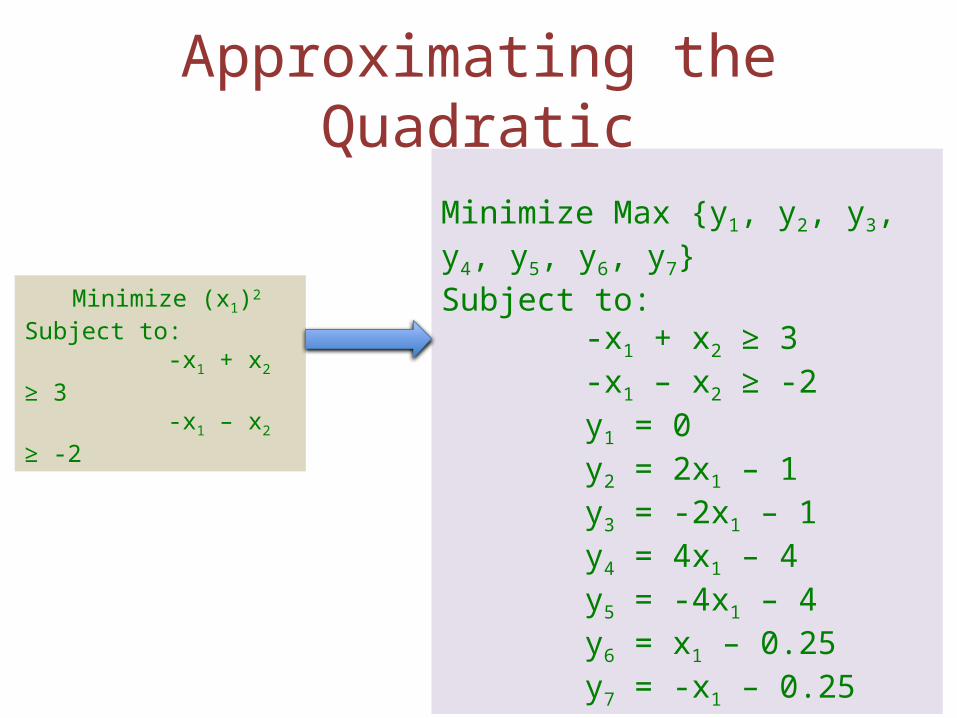
Approximating the Quadratic
Minimize Max {y1, y2, y3, y4, y5, y6, y7}Subject to:
-x1 + x2 ≥ 3-x1 – x2 ≥ -2y1 = 0y2 = 2x1 – 1y3 = -2x1 – 1y4 = 4x1 – 4y5 = -4x1 – 4y6 = x1 – 0.25y7 = -x1 – 0.25
Minimize (x1)2
Subject to:
-x1 + x2 ≥ 3
-x1 – x2 ≥ -2
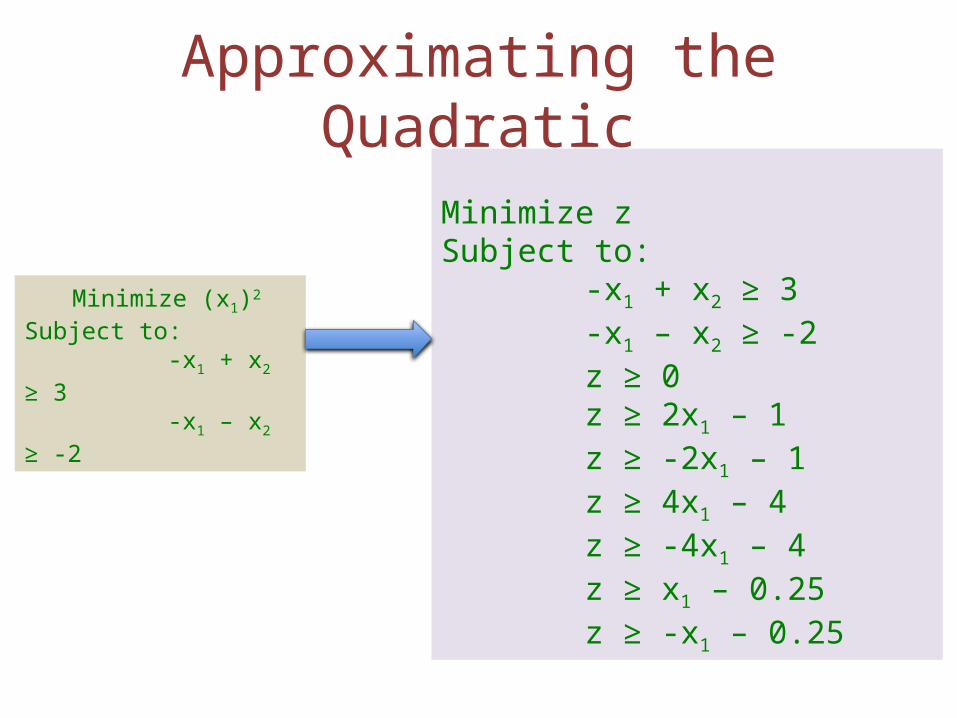
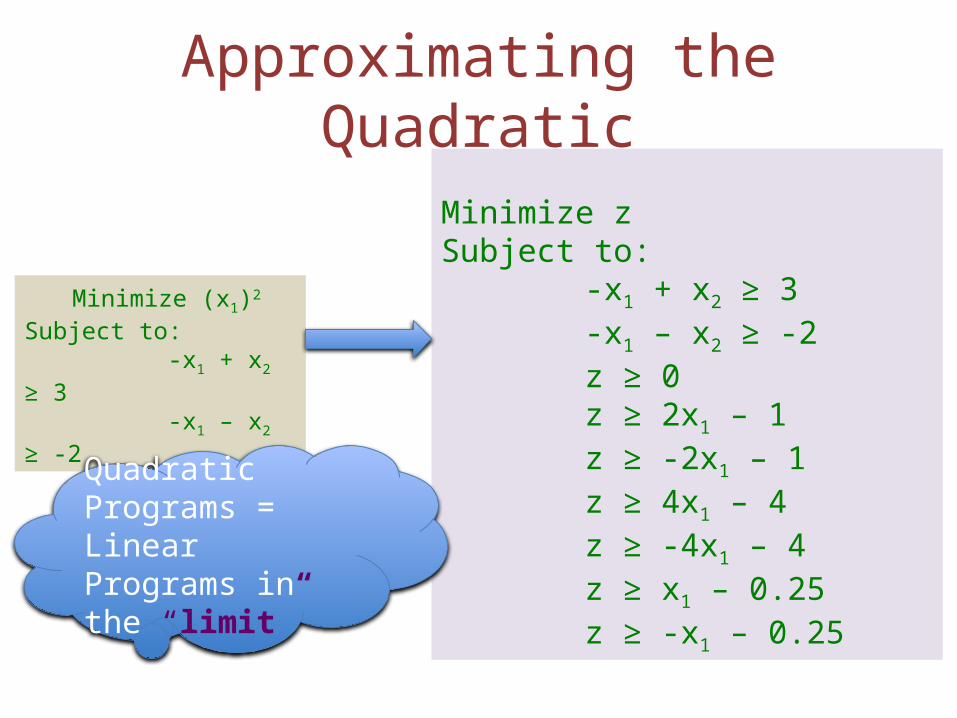
Approximating the Quadratic
Minimize zSubject to:
-x1 + x2 ≥ 3-x1 – x2 ≥ -2z ≥ 0z ≥ 2x1 – 1z ≥ -2x1 – 1z ≥ 4x1 – 4z ≥ -4x1 – 4z ≥ x1 – 0.25z ≥ -x1 – 0.25
Minimize (x1)2
Subject to:
-x1 + x2 ≥ 3
-x1 – x2 ≥ -2

Approximating the Quadratic
Minimize zSubject to:
-x1 + x2 ≥ 3-x1 – x2 ≥ -2z ≥ 0z ≥ 2x1 – 1z ≥ -2x1 – 1z ≥ 4x1 – 4z ≥ -4x1 – 4z ≥ x1 – 0.25z ≥ -x1 – 0.25
Minimize (x1)2
Subject to:
-x1 + x2 ≥ 3
-x1 – x2 ≥ -2
LPs can give successively better approximations
Approximating the Quadratic
Minimize zSubject to:
-x1 + x2 ≥ 3-x1 – x2 ≥ -2z ≥ 0z ≥ 2x1 – 1z ≥ -2x1 – 1z ≥ 4x1 – 4z ≥ -4x1 – 4z ≥ x1 – 0.25z ≥ -x1 – 0.25
Minimize (x1)2
Subject to:
-x1 + x2 ≥ 3
-x1 – x2 ≥ -2
Quadratic Programs = Linear Programs in the “limit”
QPs and LPs
Is it necessarily true for a QP that if an optimal solution exists and a BFS exists, then an optimal BFS exists?

QPs and LPs
Is it necessarily true for a QP that if an optimal solution exists and a BFS exists, then an optimal BFS exists?
NO!!
Intuition: When we think of a QP as being approximated by a succession of LPs, we have to add many new variables and constraints; the BFS of the new LP may not be the same as the BFS of the feasible region for the original constraints.
QPs and LPs
• In any QP, it is still true that any local minimum is also a global minimum
• Is it still true that the average of two feasible solutions is also feasible?

QPs and LPs
• In any QP, it is still true that any local minimum is also a global minimum
• Is it still true that the average of two feasible solutions is also feasible?– Yes!!

QPs and LPs
• In any QP, it is still true that any local minimum is also a global minimum
• Is it still true that the average of two feasible solutions is also feasible?– Yes!!
• QPs still have enough nice structure that they are easy to solve

Formal Definition of a QP
Minimize cTx + yTys.t.
Ax = bEx ≥ fGx ≤ hy = Dx
Where x, y are decision variables. All vectors are column vectors.
Formal Definition of a QP
Minimize cTx + yTys.t.
Ax = bEx ≥ fGx ≤ hy = Dx
Where x, y are decision variables. All vectors are column vectors.
The quadratic part is always non-negative

Minimize cTx + yTys.t.
Ax = bEx ≥ fGx ≤ hy = Dx
Where x, y are decision variables. All vectors are column vectors.
Formal Definition of a QP
i.e. ANY LINEAR CONSTRAINTS
Equivalently
Minimize cTx + (Dx)T(Dx)s.t.
Ax = bEx ≥ fGx ≤ h
Where x are decision variables. All vectors are column vectors.

Equivalently
Minimize cTx + xTDTDxs.t.
Ax = bEx ≥ fGx ≤ h
Where x are decision variables. All vectors are column vectors.
Equivalently
Minimize cTx + xTPxs.t.
Ax = bEx ≥ fGx ≤ h
Where x are decision variables. All vectors are column vectors.
P is positive semi-definite (a matrix that can be written as DTD for some D)

Equivalently
Minimize cTx + yTys.t.
Ax = bEx ≥ fGx ≤ h
Where x are decision variables, and y represents a subset of the coordinates of x. All vectors are column vectors.

Equivalently
Instead of minimizing, the objective function is
Maximize cTx – xTPx
For some positive semi-definite matrix P

Is this a QP?
Minimize xys.t.
x + y = 5

Is this a QP?
Minimize xys.t.
x + y = 5
No, since x = 1, y=-1 gives xy = -1. Hence xy is not an acceptable quadratic part for the objective function.
Is this a QP?
Minimize xys.t.
x + y = 5x, y ≥ 0

Is this a QP?
Minimize xys.t.
x + y = 5x, y ≥ 0
No, for the same reason as before!

Is this a QP?
Minimize x2 -2xy + y2 - 2x
s.t.x + y = 5

Is this a QP?
Minimize x2 -2xy + y2 - 2x
s.t.x + y = 5
Yes, since we can write the quadratic part as (x-y)(x-y).
A Useful Fact
• If P and Q are positive semi-definite, then so is P + Q
An example: Linear Regression
• Let f be an unknown real-valued function defined on points in d dimensions. We are given the value of f on K points, x1,x2, …,xK, where each xi is d × 1
f(xi) = yi
• Goal: Find the best linear estimator of f• Linear estimator: Approximate f(x) as xTp + q– p and q are decision variables, (p is d × 1, q is scalar)
• Error of the linear estimator for xi is denoted Δi
Δi = (xi)Tp + q - yi
Linear Regression
• Best linear estimator: one which minimizes the error– Individual error for xi: Δi
– Overall error: commonly used formula is the sum of the squares of the individual errors
Linear Least Squares Regression
QP: Minimize Σi (Δi)2
s.t.For all i in {1..K}: Δi = (xi)Tp + q - yi

Linear Least Squares Regression
QP: Minimize Σi (Δi)2
s.t.For all i in {1..K}: Δi = (xi)Tp + q - yi
Can simplify this further.

Linear Least Squares Regression
QP: Minimize Σi (Δi)2
s.t.For all i in {1..K}: Δi = (xi)Tp + q - yi
Can simplify this further. Let X denote the d × K matrix obtained from all the xi ’s: X = (x1 x2
… xK)

Linear Least Squares Regression
QP: Minimize Σi (Δi)2
s.t.For all i in {1..K}: Δi = (xi)Tp + q - yi
Can simplify this further. Let X denote the d × K matrix obtained from all the xi ’s: X = (x1 x2
… xK)
Let e denote a K × 1 vector of all 1’s
Linear Least Squares Regression
QP: Minimize ΔTΔ
s.t.Δ = XTp + qe – y

Simple Portfolio Optimization
• Consider a market with N financial products (stocks, bonds, currencies, etc.) and M future market scenarios
• Payoff matrix P: Pi,j = Payoff from product j in the i-th scenario
• xj = # of units bought of j-th product
• cj = cost per unit of j-th product
• Additional assumption: Probability qi of market scenario i happening is given

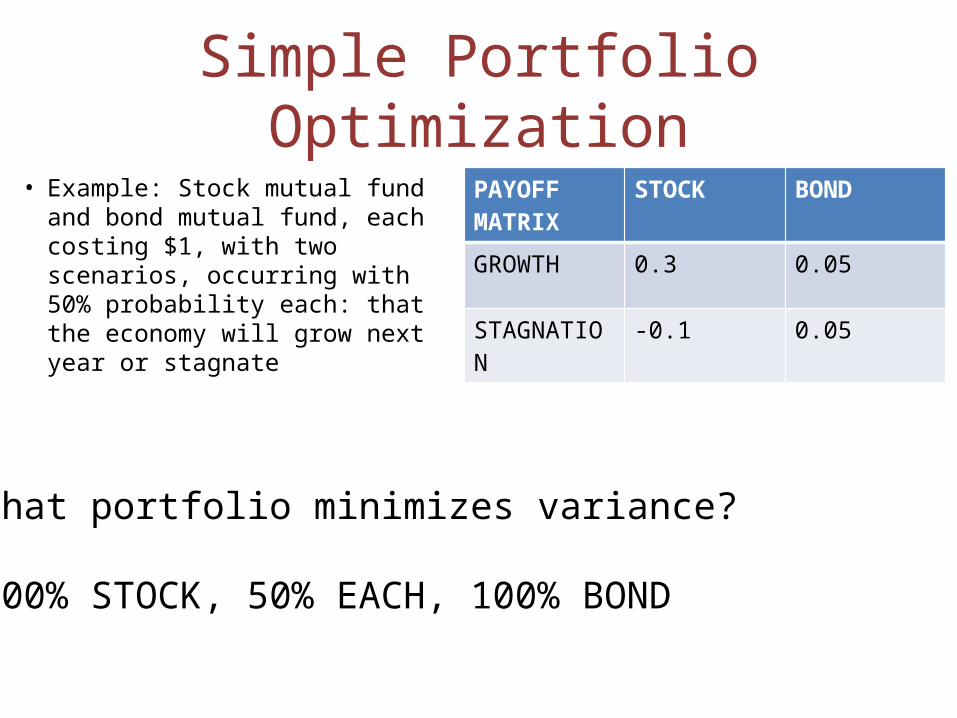
Simple Portfolio Optimization• Example: Stock mutual fund
and bond mutual fund, each costing $1, with two scenarios, occurring with 50% probability each: that the economy will grow next year or stagnate
PAYOFF MATRIX
STOCK BOND
GROWTH 0.3 0.05
STAGNATION -0.1 0.05

Simple Portfolio Optimization• Example: Stock mutual fund
and bond mutual fund, each costing $1, with two scenarios, occurring with 50% probability each: that the economy will grow next year or stagnate
PAYOFF MATRIX
STOCK BOND
GROWTH 0.3 0.05
STAGNATION -0.1 0.05
What portfolio maximizes expected payoff?
100% STOCK, 50% EACH, 100% BOND

Simple Portfolio Optimization• Example: Stock mutual fund
and bond mutual fund, each costing $1, with two scenarios, occurring with 50% probability each: that the economy will grow next year or stagnate
PAYOFF MATRIX
STOCK BOND
GROWTH 0.3 0.05
STAGNATION -0.1 0.05
What portfolio maximizes expected payoff?
100% STOCK, 50% EACH, 100% BOND
Simple Portfolio Optimization• Example: Stock mutual fund
and bond mutual fund, each costing $1, with two scenarios, occurring with 50% probability each: that the economy will grow next year or stagnate
PAYOFF MATRIX
STOCK BOND
GROWTH 0.3 0.05
STAGNATION -0.1 0.05
What portfolio minimizes variance?
100% STOCK, 50% EACH, 100% BOND

Simple Portfolio Optimization• Example: Stock mutual fund
and bond mutual fund, each costing $1, with two scenarios, occurring with 50% probability each: that the economy will grow next year or stagnate
PAYOFF MATRIX
STOCK BOND
GROWTH 0.3 0.05
STAGNATION -0.1 0.05
What portfolio minimizes variance?
100% STOCK, 50% EACH, 100% BOND
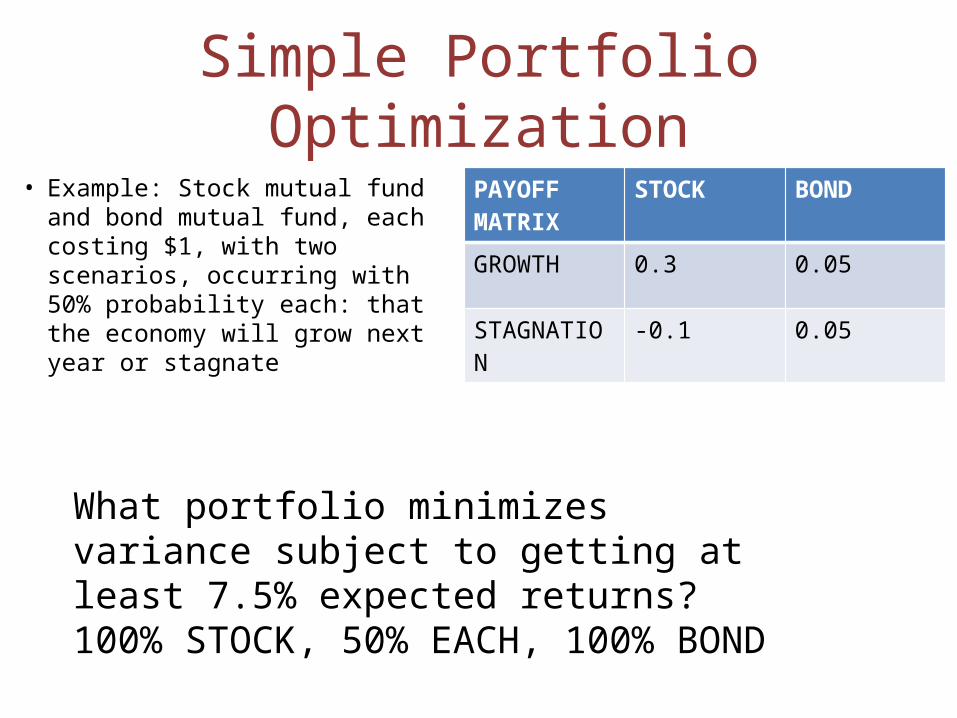
Simple Portfolio Optimization• Example: Stock mutual fund
and bond mutual fund, each costing $1, with two scenarios, occurring with 50% probability each: that the economy will grow next year or stagnate
PAYOFF MATRIX
STOCK BOND
GROWTH 0.3 0.05
STAGNATION -0.1 0.05
What portfolio minimizes variance subject to getting at least 7.5% expected returns?100% STOCK, 50% EACH, 100% BOND

Simple Portfolio Optimization• Example: Stock mutual fund
and bond mutual fund, each costing $1, with two scenarios, occurring with 50% probability each: that the economy will grow next year or stagnate
PAYOFF MATRIX
STOCK BOND
GROWTH 0.3 0.05
STAGNATION -0.1 0.05
What portfolio minimizes variance subject to getting at least 7.5% expected returns?100% STOCK, 50% EACH, 100% BOND

Minimizing Variance (≈ Risk)
• Often, we want to minimize the variance of our portfolio, subject to some cost budget b and some payoff target π
• Let yi denote the payoff in market scenario iyi = Pix
• Expected payoff= z = Σi qiyi = qTy
• Variance = Σi qi(yi - z)2 = Σi ((qi)1/2(yi - z))2
• Let vi denote (qi)1/2(yi – z)
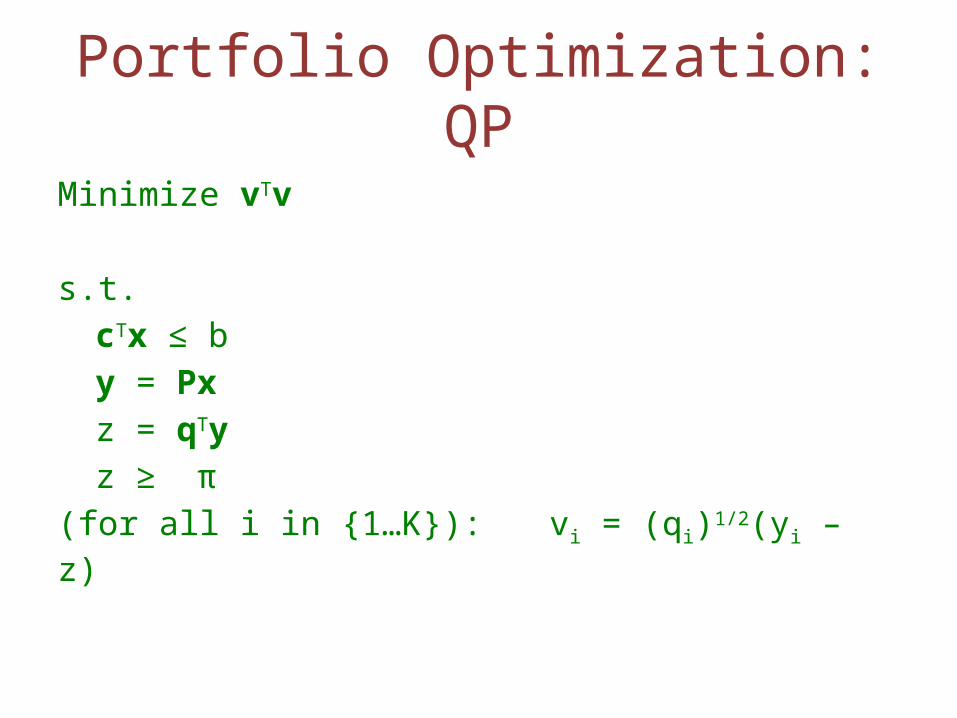
Portfolio Optimization: QP
Minimize vTv
s.t.cTx ≤ by = Pxz = qTyz ≥ π
(for all i in {1…K}): vi = (qi)1/2(yi – z)
THANK YOU!!!

















