Page 1
Multi-Objective Topology Optimization for Bi-dimensionalStructures
Pedro Simão de Assunção Caldeira
Thesis to obtain the Master of Science Degree in
Aerospace Engineering
Supervisors: Prof. José Arnaldo Pereira Leite Miranda GuedesProf. José Firmino Aguilar Madeira
Examination Committee
Chairperson: Prof. Filipe Szolnoky Ramos Pinto CunhaSupervisor: Prof. José Firmino Aguilar Madeira
Member of the Committee: Prof. João Orlando Marques Gameiro Folgado
November 2018
Page 3
Dedicated to my brothers Francisco and Tiago, my mother Lina and my grandfather Arsenio
iii
Page 5
Resumo
Nos dias de hoje um dos desafios da engenharia e a otimizacao do desempenho, tempo, consumo entre
outros parametros para obter solucoes de boa qualidade e economicas, daı a elevada importancia dos
modelos de otimizacao em projetos de engenharia.
O estudo desenvolvido nesta tese tem como objetivo otimizar a topologia de uma estrutura bidimen-
sional minimizando o trabalho das forcas externas. A estrutura e sujeita a constrangimentos, condicoes
fronteiras e quantidade de material. A otimizacao e feita para que dois objetivos sejam minimizados,
suportar duas cargas diferentes.
Para tal foi desenvolvido um programa em Matlab que resolve um problema the otimizacao multi-
objectivo, para quaisquer duas funcoes diferenciaveis, recorrendo a derivadas. Numa segunda fase e
elaborado outro algoritmo que utiliza os conceitos de otimizacao multi-objectivo para fazer a otimizacao
topologica da estrutura, que com base nas ideias do primeiro modelo discretiza o espaco de design num
numero consideravel de elementos finitos, sendo a densidade de cada elemento a variavel de design.
Para que os dois objetivos sejam minimizados, as duas funcoes objetivo sao minimizadas utilizando
o gradiente, nao existindo uma solucao otima mas sim um conjunto de solucoes otimas que satisfazem
os os constrangimentos. As funcoes objectivo calculam o valor do trabalho das forcas externas para
duas situacoes.
Recorrendo ao conceito de dominancia de Pareto sao encontradas varias solucoes otimas, atraves
de um processo iterativo onde as funcoes objectivo sao avaliadas duas vezes e sao nos dadas duas
direcoes de procura modo a minimizar cada uma das funcoes objetivo em cada iteracao.
Palavras-chave: Otimizacao, Multiobjectivo, Topologia, Dominancia de Pareto, Derivadas,
Estrutura Bidimensional
v
Page 7
Abstract
In order to have the best quality and economic solutions, one of the main engineering challenges is the
optimization of performance, time, consumption, amongst other parameters. This is why the optimization
models have a big importance in any engineering project.
The study developed in this thesis aims to develop a program that performs the topology optimization
on a bidimensional plate, minimizing compliance to obtain a structure with maximum stiffness. The
structure is subject to constrains and boundary conditions. The optimization is made to minimize two
objectives.
For this purpose a Matlab program is developed to solve a problem of multi-objective optimization
for the case of two differentiated functions. In a second phase is elaborated a topology optimization
algorithm based on the concept of multi-objective optimization problems using derivatives.
The second model discretizes the design domain in a considerable number of finite elements. Thus
the density of each element is a design variable, the two objective functions to minimize are the values
of the compliance for two different cases.
In other words, the two goals are met, as the two goals are minimized through the gradient. Not
having an optimal solution but infinite solutions, that therefore meet the objectives. In this set of solutions
there is not one solution that can be better than the other solutions. Resorting to the concept of Pareto
dominance - several optimal solutions are found through an iterative process, where two analyses are
made and are given two directions to minimize each function in each iteration.
Keywords: Optimization, Topology, Multi-objective,Pareto Dominance, Derivatives, Bidimen-
sional Structure
vii
Page 9
Contents
Resumo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
List of Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xi
List of Figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiii
Nomenclature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xv
Glossary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xvii
1 Introduction 1
1.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.3 Thesis Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 Background 3
2.1 Multi-objective Optimization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.2 Pareto Dominance(PD) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.3 Direct Multisearch for Multi-objective Optimization (DMS) . . . . . . . . . . . . . . . . . . 5
2.4 Formulation of the Optimization Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3 Implementation 9
3.1 Gradient Based Search Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.2 Example of a MOOP algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.3 Numerical Model 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.3.1 Formulation of the Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.3.2 Description of the Model 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.4 Numerical Model 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.4.1 Topology Optimization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.4.2 Solid Isotropic Material with Penalization(SIMP) . . . . . . . . . . . . . . . . . . . . 14
3.4.3 Formulation of the Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.4.4 Description of the Model 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4 Results 21
4.1 Problem Description and Results for Model 1 . . . . . . . . . . . . . . . . . . . . . . . . . 21
ix
Page 10
4.1.1 Case 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
4.1.2 Case 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.1.3 Case 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.1.4 Case 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.2 Problem Description and Results for Model 2 . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.2.1 Case 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.2.2 Case 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.2.3 Case 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5 Conclusions 37
5.1 Achievements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
5.2 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Bibliography 41
x
Page 11
List of Tables
4.1 Number of points . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
xi
Page 13
List of Figures
2.1 Pareto Dominance example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3.1 MOOP Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.2 Topology Optimization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.3 Illustrative example of the problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.4 Illustrative Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.5 Illustrative Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.1 Solution 1 - First Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4.2 Case 2 - Expected solution from Deb [1] . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.3 Case 2 - Obtained solution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.4 Case 3 - Obtained solution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.5 Case 3 - Obtained solution with zoom and solution . . . . . . . . . . . . . . . . . . . . . . 26
4.6 Solutions from Zitzler et al. [10] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.7 Solution for case 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.8 Case 4 - Obtained solution with the expected solution and zoom . . . . . . . . . . . . . . 28
4.9 Tested algorithms from Zitzler et al. [10] for case 4 . . . . . . . . . . . . . . . . . . . . . . 29
4.10 Pareto front behaviour with change in penalty . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.11 Case 1 - Obtained solution for different values of penalty . . . . . . . . . . . . . . . . . . . 31
4.12 Case 2 - Obtained solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.13 Schuematic example of the solution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.14 Points obtained using single objective optimization . . . . . . . . . . . . . . . . . . . . . . 33
4.15 Solutions obtained from three different initializations . . . . . . . . . . . . . . . . . . . . . 34
4.16 Point from the tip of the Pareto front . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.17 Evolution of the structure along the Pareto Front . . . . . . . . . . . . . . . . . . . . . . . 35
5.1 Illustractive example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
xiii
Page 15
Nomenclature
Greek symbols
α Step size
ν Poisson coefficient
Ω Domain
ρ Density
Roman symbols
E Young’s modulus
p Penalty
c1 e c2 Compliance for objective function 1 and 2
Subscripts
i Elemente number
i, j, k, l Tensor indexes
Superscripts
T Transpose
xv
Page 17
Glossary
DMS Direct Multisearch for Multi-objective Optimiza-
tion
FEM Finite Element Method
MOOP Multi-Objective Optimization Problem.
PD Pareto Dominance.
SIMP Solid Isotrpic Material with Penalization
TO Topology Optimization
xvii
Page 19
Chapter 1
Introduction
1.1 Motivation
Optimization is common goal in every engineering project, since in the present days any company wants
to reduce the coasts of a project optimizing time, material quantities or consumption.
The Topology Optimization(TO) consists in a powerful computational method of structural optimiza-
tion, which allows to design the optimum topology of structures according to a certain criteria. Essen-
tially, TO seeks the distribution of material within a project domain, removing and adding material at
each element of that domain, in order to, minimize a specified objective function and satisfying given
constraints imposed to the optimization problem.
The main objective of this thesis is to study multi-objective optimization problems using derivatives in
order to apply TO concept to design a bidimensional mechanical structure.
This technology can be applied, for example, to design different components in the aerospace sector,
in order save material that leads to a decrease of weight that in its turn saves fuel.
1.2 Objectives
This work is focused in the study of optimization problems, in particular multi-objective optimization of
topology.
The goal is to develop an algorithm to solve multi-objective optimization problem (MOOP), in order
to apply the concepts to another algorithm capable to solve topology optimization problems. The final
algorithm must be able to solve a topology problem for a rectangular plate. This technology can be
used for example to design stringers for an aircraft wing, since an aircraft needs to have a very strong
structure, resistant and at the same time as light as possible this technology can be very useful in the
design of many components of an aircraft.
1
Page 20
1.3 Thesis Outline
This thesis is divided in five chapters, Introduction, Background, Implementation, Results and Conclu-
sions.
The first chapter is the introduction where is explained the motivation for the work and the objectives
to be accomplished.
The second chapter is where all the theoretical background is, presenting the methods and concepts
used during the development of this thesis.
In the third chapter are presented the two numerical models developed during the work, it is explained
the formulation of the problems and the algorithms.
In chapter four the results of the developed models are presented and commented.
And finally the last chapter are the conclusions where the achievements are exposed and also a
discussion about possible future work to improve the obtained solutions.
2
Page 21
Chapter 2
Background
2.1 Multi-objective Optimization
Optimization is a process in which the main objective is to find feasible solutions, compare them in order
to find one or more optimal solutions, until no better solutions are found.
Besides having more than one objective, there are a number of fundamental differences between
single-objective and multi-objective optimization, as follows,Deb [1]:
• multiple goals instead of one
• dealing with two search spaces
• no artificial fix-ups
For a single-objective optimization there is only one goal to be achieved - find the optimum solution.
Even though, the search space may have several local optimum solutions the goal is to find the global
optimum solution.
In a single-objective optimization process, as long as, a new solution is better than the previous ones,
then that solution can be accepted. In the other hand, in a multi-objective optimization there is more than
one objective, for the present work there are two objectives.
In this particular case, there is not an optimum solution but a set of optimum solutions, also called
Pareto optimal front, which every solution is optimum, moreover some solutions can be better to one
objective and worst to the other objective, and therefore it is impossible to say which solution is better.
Another difference in a multi-objective optimization is that it involves two search spaces, while in a
single-objective optimization there is only one space of search, the variables space, in a multi-objective
optimization, there is also the objective space.
Even though the two spaces are related, the properties of the two spaces could not be similar.For
example, a proximity of two solutions in one space does not mean a proximity in the other space. In an
optimization algorithm the search is done in the space of the variables. However, the proceedings of an
algorithm in the variable space can be traced in the objective space.
3
Page 22
The real world optimization problems are multi-objective. In the past there was a fault of means to
handle multi-objective problems as a real multi-objective optimization problem. Therefore, designers had
to innovate different fix-ups to turn multi-objective problems into single-objective problems, to know more
about this fix-ups check Deb [1]. The concept of Pareto Dominance (PD) helps to overcome some of the
difficulties and give the practical means to deal with the multi-objective problems that was not possible
in the past.
To verify if a solution is better than other, the objectives of the problem that were previously estab-
lished during the formulation, should be compared. Cost, efficiency, consumption, quality or product
reliability are common objectives in an optimization problems. For instance, when there is several ob-
jectives to be achieved some of them can be conflicting with each other - for example, cost reduction
and increase of the product reliability are in conflict. Since there is several possible solutions for these
two objectives it is impossible to find only one possible solution. Instead of it, the goal is to find a set of
solutions which, no solution is better than other.
When the set of solutions are found, it is necessary to make a decision and to choose a solution.
Normally, the person or the group of people who make this decision is someone who has a better insight
into the problem and, who can express preference relations between different solutions. Normally the
decision maker is responsible of choosing the final solution and to establish the priority criteria to be
achieved, Miettinen [2]. The MOOP can formulated in the fowling way:
minimize F (x) = (f1(x), f2(x), ..., fk(x))
subject to hj(x) = 0; j = 1 to J
gm(x) ≤ 0; m = 1 to M
xLi ≤ xi ≤ xUi ; n = 1 to N
(2.1)
Where k is the number of objective functions,J the number of equality constrains, M is the number of
inequality constrains and N the number of design variable. F (x) is k-dimensional vector of objective
functions.
2.2 Pareto Dominance(PD)
In order to solve a MOOP most of the algorithms use the concept of dominance to search for optimum
solutions. The predominant solution concept in defining solutions for MOOP is that of Pareto optimality.
A point x∗ in the feasible design space Ω is called Pareto optimal if there is no other point x in the
set S that reduces at least one objective function without increasing another one. This is defined more
precisely as follows: A point x∗ in the feasible design space Ω is a Pareto optimal if and only there does
not exist another point x in the set S such that F (x) ≤ F (x∗) with at least one Fi(x) < Fi(x∗), Arora [3].
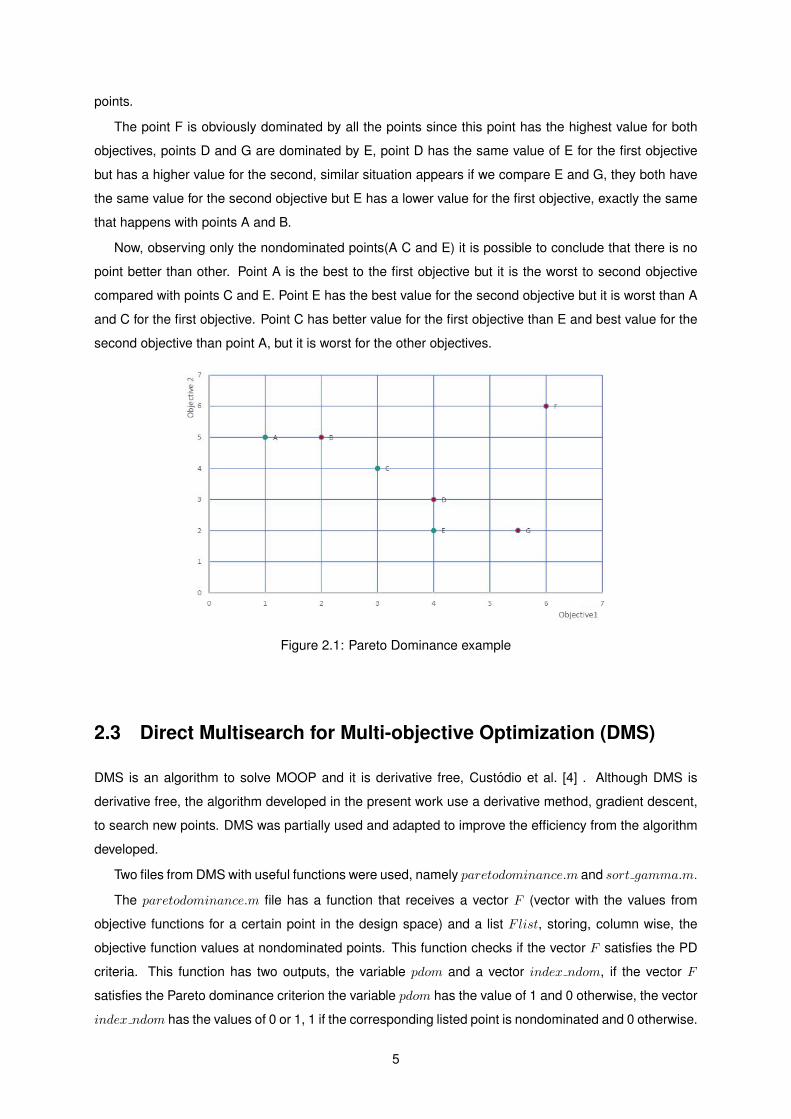
In the figure 2.1 it is possible to observe an illustrative example of the concept of PD with a group of
points in the objectives space, the goal is to minimize both objectives.
The red points (B D G and F) are the dominated points and the green points(A C E) are nondominated
4
Page 23
points.
The point F is obviously dominated by all the points since this point has the highest value for both
objectives, points D and G are dominated by E, point D has the same value of E for the first objective
but has a higher value for the second, similar situation appears if we compare E and G, they both have
the same value for the second objective but E has a lower value for the first objective, exactly the same
that happens with points A and B.
Now, observing only the nondominated points(A C and E) it is possible to conclude that there is no
point better than other. Point A is the best to the first objective but it is the worst to second objective
compared with points C and E. Point E has the best value for the second objective but it is worst than A
and C for the first objective. Point C has better value for the first objective than E and best value for the
second objective than point A, but it is worst for the other objectives.
Figure 2.1: Pareto Dominance example
2.3 Direct Multisearch for Multi-objective Optimization (DMS)
DMS is an algorithm to solve MOOP and it is derivative free, Custodio et al. [4] . Although DMS is
derivative free, the algorithm developed in the present work use a derivative method, gradient descent,
to search new points. DMS was partially used and adapted to improve the efficiency from the algorithm
developed.
Two files from DMS with useful functions were used, namely paretodominance.m and sort gamma.m.
The paretodominance.m file has a function that receives a vector F (vector with the values from
objective functions for a certain point in the design space) and a list Flist, storing, column wise, the
objective function values at nondominated points. This function checks if the vector F satisfies the PD
criteria. This function has two outputs, the variable pdom and a vector index ndom, if the vector F
satisfies the Pareto dominance criterion the variable pdom has the value of 1 and 0 otherwise, the vector
index ndom has the values of 0 or 1, 1 if the corresponding listed point is nondominated and 0 otherwise.
5
Page 24
Basically this function evaluates a new point, if it is nondominated the point is stored in the lists and
all the points dominated by the new one are erased from the list
The sort gamma.m file has a function that sorts a list of points according to the largest gap between
two consecutive points, in the objective domain.
This function has as input a list of points P , a list of function values corresponding to the points listed
on P , a list alfa that has the corresponding step size parameters, a variable stop alfa for the case of
existence of a stop criteria based on the step size and the value of this criteria is an input as well, called
tol stop, the last input is spread option and has values of 0, 1 or 2 according with different spread option.
As an output the function give three ordered lists, one with the points, one with the functions values
corresponding to the listed points and a list with the step size parameters also according with the list of
points.
2.4 Formulation of the Optimization Problem
A correct definition and formulation of an optimization problem it is a very important task in order to solve
the problem, and it is generally accepted that this takes about 50% of the effort to solve it, Arora [3].
If a problem is not well formulated different problems can appear, for example, if there are contradic-
tory constrains or even if there are to many constrains it is possible that the formulated problem has no
solution.
The formulation of an optimization problem generally takes four steps:
• Objectives and description of the problem
• Definition of design variables
• Optimizations criteria
• Formulation of constrains
In order to start formulating the problem first it should be done a description of the problem and
realize witch are all the requirements and objectives, it is also necessary have into account the sources
available.
The second step consists in identifying the design variables, in other words, the set of variables that
describes the problem.
This variables should be independent from each other as much as possible. If they are dependent
their values cannot be represented independently once they have constrains between them, the number
of independent variables represents the degree of freedom of the problem. This variables can have any
value that does not violate the constrains.
After identify the criteria that allow a construction of one or more mathematical functions , it is possible
to identify the variables of the problem that will give different feasible designs for the system. This
functions will give different solutions that allow to compare different designs and choose one, these
functions are called objective functions.
6
Page 25
The last step consists in, identify where there is a need to do some limitations or restrictions, this
restrictions are called constrains of the problem.
All the constrains should depend on the design variables, in order to guarantee that the design is
correct. A generic mathematical formulation is given by equation 2.1.
7
Page 27
Chapter 3
Implementation
The implementation of a computational model to solve the proposed problem for the present work is
divided in two phases.
First it is developed a model where the goal is to obtain the Pareto front for two differentiable functions
with one or two variables, using the gradient to search new points.
The second model is an adaptation of the first model to solve a topology optimization problem using
the concept of MOOP from the first developed model. Two objective functions are used, both with the
objective to minimize the compliance of the structure, for a force upwards and the other to a downwards
force. Both models are written in Matlab and they resort to derivatives to solve the problem.
3.1 Gradient Based Search Method
A gradient based search method as the name says, uses the gradient of a function to find a local mini-
mum. In order to use a method like this the function has to be continuously differentiable everywhere in
the feasible design space, where the design variables are assumed to be continuous and they can have
any value in their allowable ranges. Gradient based search methods are iterative and the calculations
performed are repeated in every iteration.
According to Arora [3] the repeated calculations in every iteration can be represent by the equation
3.1 in vector form or equation 3.2 as component form,
x(k+1) = x(k) + ∆x(k); k = 0, 1, 2, ... (3.1)
x(k+1)i = x
(k)i + ∆x
(k)i ; i = 1 to n; k = 0, 1, 2, ... (3.2)
Where,
k = superscript representing the iteration number
i = subscript denoting the design variable number
x(0) = starting point
9
Page 28
∆x(k) = change in the current point
The change in the current point can written as represented in 3.3,
∆x(k) = αkd(k) (3.3)
Where d(k) is the search direction that in the present work is obtained using the value of the gradient
in the point of departure of each iteration and αk is a scalar called the step size in the search direction.
An iterative scheme using equation 3.1 and 3.2 is continued until the stop criteria is achieved. Joining
DMS and the concept of PO it is developed an algorithm to solve MOOP
3.2 Example of a MOOP algorithm
Taking as example the first presented study case:
minimize F (x) = (f(x), g(x))
f(x, y) = (1.5x− 2)2 + y2 , g(x, y) = x2 + 1.5y2
subject to − 5 ≤ x ≤ 5; −5 ≤ y ≤ 5
(3.4)
In this example the lists are initialized with the pointA(1, 1) for which the functions are worth, f(x, y) =
1.25 and g(x, y) = 2.5 and alpha = 1. The gradient of each function is calculated in equations 3.5 and
3.6. So using the gradient of f and g and applying the gradient based search method two new points
are founded and evaluated, B and C.
∇f =
dfdx
dfdy
=
2(1.5x− 2)
2y
(3.5)
∇g =
dgdx
dgdy
=
2x
3y
(3.6)
This two points are dominated by A as it is possible to observe in figure 3.1, where it is represented the
variables and objectives spaces. Once these two points are dominated they are eliminated from the lists
and it is considered unsuccessful, so the step size is divided by two and the calculations are repeated.
Now for a step size parameter of 0.5, points C and D are obtained. They are nondominated so they
are stored in the lists. If at least on of the points are stored in the lists, it is considered a success and
alpha is increased two times as is in this case.
This process is repeated until the stop criteria is reached and the expected result should be a Pareto
front, the stop criteria for this problem is the step size.
10
Page 29
(a) Variables space (b) Objective space
Figure 3.1: MOOP Example
3.3 Numerical Model 1
The first numerical model developed, as it says in the beginning of this chapter, is a model where it is
possible to obtain a Pareto front for any two differentiable functions with two variables each, using the
gradient to search new points.
3.3.1 Formulation of the Problem
As is described in 2.4 the formulation of a multi-objective optimization problem generally takes four steps.
Objectives and description of the problem
The goal of this first problem is to develop a Matlab algorithm capable of find the Pareto front for any two
differentiable functions introduced by the user. These functions should be differentiable, in order to be
possible to use the gradient to find the direction of minimization of each function.
Definition of design variables
The design variables depend on the functions introduced by the user and each function have to have
one or two variables, the Matlab code is ready to receive two variables x and y.
Optimizations criteria
Since this model is capable to solve different MOOP, the optimization criteria is minimize any two func-
tions introduced by the user of the program, that depend on the design variables.
Formulation of constrains
The only constrains used in this problem are the design space of each design variable, these values are
also introduced by the user putting the lowest and the highest value that each variable can assume.
11
Page 30
This problem have the fowling mathematical formulation:
minimize F (x) = (f1(x), f2(x))
subject to xL1 ≤ x1 ≤ xU1 ; xL2 ≤ x2 ≤ xU2(3.7)
where xL and xU are the lower and upper bounds respectively.
3.3.2 Description of the Model 1
The main code is in the file paretos.m and this file is composed by a call function called pareto. This
function has as input the two objective functions depending on one or two variables, the lower and upper
bounds of each design variable is also an input.
To start with, the program converts the expression of each objective function introduced in Matlab
function, in order to, make possible the calculation of the functions values and the gradient of each
function.
To initialize the search of a Pareto set of solutions it is generatedN = 500 (this value can be changed)
random points in the design domain. This initialization is more efficient than to start from only one point,
since this way we have several different points to start the search.
After the initialization, the points are evaluated one at a time in a cycle that works in the fowling way
- the values of both functions are calculated and saved in the variable Ftemp, the values of the design
variables are stored in a variable called xtemp, and the alphatemp has always the same value (one).
The variable Ftemp is an input of the function paretodominance, explained in 2.3, to evaluate the
point, the program checks if this point could belong to the set of nondominated points comparing with
all the values from Flist. In case this point is dominated, the cycle starts again analysing other point.
If the point is nondominated is inserted in the list Flist, xlist and alphalist. If there are points that are
dominated by the new point these points are eliminated from the lists.The cycle is repeated until the N
points are checked.
After this initialization, there is a set of nondominated points and the cycle that will solve the problem
will start. To start the main cycle the function sort gamma is called to find the biggest gap between
two consecutive points, in the objective space and sort the points with this criteria, as explained in 2.3.
Therefore, the first point from the list, is the point selected to start the search for new points.
The next step is to calculate the gradient of each function in the chosen point, that will give two
directions of search for two new points using expression 3.2. One uses the gradient of the first function
to obtain a new point and the second point is obtained using the gradient from the second function .
After the two new points are found, this two points are evaluated to check if they are dominated by
any existing point in the lists. If a point is nondominated is saved in the list and the existing points are
evaluated to verify if any of the old points are dominated by the new point, if there is any point dominated
by a new one, the dominated points are eliminated from the lists.
Finally, the last task from the cycle is to verify if the search for a new point was a success or not. If at
least one of the new points are added to the set of nondominated points, it is considered a success. In
12
Page 31
the other hand, if any point is not added to the set of nondominated solutions it is considered a failure.
In the case of success the step size parameter is doubled and, in case of failure the step size parameter
is divided by two.
The cycle has as stop criteria, the step size parameter. When the highest value of the step size is
less than the chosen tolerance (0.0001),the stop criteria is achieved. If this criteria is never satisfied,
after a significant number of evaluations the cycle finishes and the plot of objectives functions is plotted
and therefore the problem is solved.
3.4 Numerical Model 2
The second numerical model is the one that solves the main problem proposed for this work that together
with the PD concept and the concept of topology optimization, gives an optimized structure, for two
objectives and some constrains.
Besides the functions used in the first model, this model uses two functions(topu and topd) that are
variants from the function top, this function belongs to a code of topology optimization, for more details
about this function check Sigmund [6].
3.4.1 Topology Optimization
Nowadays Topology Optimization it is a technology well established and designs obtained with these
methods are in production on a daily basis.
The optimization of the geometry and topology of structural layout has a big influence on the perfor-
mance of structures, and in the last two decades there has been a big development of this technology,
that is a very important area of structural optimization. This development is manly due to the success of
the material distribution method for generating optimal topologies of structural elements.
An efficient use of materials is important in many different areas, for example in the aerospace
and automotive industry is used to apply sizing and shape optimization to the design of structures and
mechanical elements.
The layout of a structure contains information about topology, shape and sizing of the structure and
with the material distribution method it is possible solve all three problems simultaneously.
According to Bendsoe and Sigmund [5], these three different problems address different aspects of
a structural design problem, for example, in a sizing problem the goal is typically to find the optimal
thickness distribution of a linearly elastic plate or the optimal member areas in a truss structure. The
optimal thickness distribution minimizes a physical quantity, for example, the compliance, peak stress or
deflection while equilibrium and other constraints on the state and design variables are satisfied. The
main feature of a sizing problem is that the domain of the design model and state variables is known a
priori and is fixed throughout the optimization process. In a shape optimization problem the goal is to
find the optimum shape of this domain, that is, the shape problem is defined on a domain which is now
the design variable.
13
Page 32
Topology optimization of solid structures involves the determination of features such as the number
and location and shape of hole and the connectivity of the domain.
In this method, the project variables are numerical parameters that can change the material distribu-
tion in the structure with the propose of save material in regions with reduced solicitation.
There are two types of project variables, continuous or discrete. In the case of a truss, in which the
section area of the bars are used as discrete project variables, it is possible to allow that this areas can
be zero, with this there is the possibility to remove from the truss bars that has no effort, as it is possible
to see in figure 3.2 a).
Figure 3.2: Topology Optimization examples, Sigmund [6]
In figure 3.2 b) it is possible to observe an example of shape optimization.
If continuous optimization is used, as for example in a bidimensional plate, the ideal changes of
topology can be made by allowing the thickness be zero and the maximum thickness have a reasonable
value for the project. The same effect can be achieved by using the density as a project variable, where
the density can only have values between 0 and 1. An example of continuous bidimensional optimization
can be observed in figure 3.2 c).
In the present work the space design was divided in finite elements and was used, as design variable,
the relative density.
3.4.2 Solid Isotropic Material with Penalization(SIMP)
The SIMP model from Bendsøe and Sigmund [7], is an Isotropic model for solid-void interpolations in
elasticity. In SIMP a continuous variable ρ, 0 ≤ ρ ≤ 1 is introduced, resembling a density since the
volume of the structure is evaluated as
V ol =
∫Ω
ρ(x)dΩ (3.8)
In order to avoid a singular FEM problem a small lower bound is imposed, 0 < ρmin ≤ ρ, when solving
for equilibrium in full domain Ω, in this work ρmin = 0.001.
In the equilibrium analysis the relation between the material tensor Cijkl(x) and the density is given
14
Page 33
by
Cijkl(ρ) = ρpC0ijkl, (3.9)
where the given material is isotropic, in other words C0ijkl is characterized by two variables, here chosen
as the Young’s modulus E0 and the Poisson ratio ν0, the interpolation 3.9 satisfies that Cijkl(0) = 0 and
Cijkl(1) = C0ijkl.
With this the final design should have density zero or one in all points, this design is a black and
white design for which the performance has been evaluated with a correct physical model.
For problems where the volume constraint is active, as in this work, Bendsøe and Sigmund [7] says
that experience shows that optimization does actually result in such designs if one chooses p sufficiently
big, typically is required that p ≥ 3. The reason is that, for such a choice, intermediate densities are
penalized; volume is proportional to stiffness, but ρ is inversely proportional.
3.4.3 Formulation of the Problem
As is described in 2.4 the formulation of a MOOP generally takes four steps.
The previous numerical model is more generic since the model can receive any differentiable func-
tion. For this problem the functions are always the same two objective functions.
Objectives and description of the problem
The problem treated in this model, is the TO of a bidimensional structure discretized by finite elements.
The structure is fixed at one side and subject to two loads in the tip of the opposite side, one on the
top with upwards direction and the other in the bottom downwards as it is possible to see in figure. 3.3 .
The objectives to be accomplished in this problem is the minimization of the compliance in order to
maximize the stiffness of the structures. One objective is minimization of compliance to the upwards
force case and the other is to the downwards force case.
Figure 3.3: Illustrative example of the problem Sigmund [6]
15
Page 34
Definition of design variables
In the present days the finite element method (FEM) is applied in several engineering problems and this
is one of the principal methods used in numerical analysis of structures.
This method consists in dividing the space domain in subdomains, called finite elements, and from
this concept it is build an approximated solution for the complete domain.
The material properties are assumed to be constant within each element and the design variables are
the element relative density. With this, the design variables are in a matrix with dimension nelx × nely,
where nelx and nely are inputs variables corresponding to the number of elements in the horizontal and
vertical direction respectively. The matrix has the values of the relative density of each element. This
relative densities are obtained using the Solid Isotropic Material with Penalization(SIMP) also known as
”power-law approach” as explained in Bendsoe and Sigmund [5].
It is also relevant understand how a matrix with the design variables are organized. The design
domain is rectangular and discretized by square finite elements, the elements and nodes are organized
in the fowling way, column by column starting in the upper left corner. Each node has two degrees of
freedom.
Optimizations criteria
The two objectives functions for this problem gives the compliance value. The goal is to minimize the
compliance in order to maximize the stiffness.
The compliance is the work done by the external loads applied to the structure when is in equilibrium.
Therefore, the compliance was chosen as objective function. The two objective functions are both
the value of the compliance but for different situations, the first objective is the compliance for only one
load, for example, only the load one in figure 3.3 and the other objective function it is also the compliance
but only for the force two in the figure 3.3.
The objective function can be written as follow:
c(x) = [U ]T [K][U ] =
N∑e=1
(xe)puTe k0ue (3.10)
where U and F are the global displacement and force vectors, respectively, K is the global stiffness
matrix, ue and ke are the element displacement vector and stiffness matrix respectively, x is the vector
of design variables. Using the FEM it is possible to obtain the global stiffness matrix, [K], this matrix is
obtained by the sum of each element stiffness matrix, [k]e using the following expression:
[K]e =
∫V
[B]T [D][B]dV (3.11)
[K] =
Ne∑e=1
[k]e (3.12)
where [B] is the extension-displacement matrix and [D] is the constitutive matrix.
16
Page 35
From the vector of loads, f , and from the stiffness matrix is possible to obtain the displacement fields,
u, using the fowling expression:
[K][U ] = f (3.13)
Knowing that the compliance is the work done by the applied loads in the structure, it is possible to relate
with the displacement fields as it follows:
c = fT [U ] = [U ]T [K][U ] (3.14)
In order obtain the gradient from the objective function, it will be written the expressions of the function
and its own gradient, in relation to the design variables, it is possible to realize that:
c(u, x) = fTu (3.15)
dc
dx(u, x) =
∂c
∂x+∂c
∂u
∂u
∂x= fT
∂u
∂x(3.16)
Looking to equation 3.15 it is possible to notice that the objective function does not explicitly depend on
the design variables, so the partial derivative ∂c∂x is null. Although there is not an explicit relation between
the objective function or the gradient function with the design variables, it is still possible to easily obtain
the gradient function, using the displacement fields 3.14.
The gradient can be computed using the adjoint method, according with Christensen and Klarbring
[8] as;dc
dx= −[U ]T
∂[K]
∂x[U ] (3.17)
Following the Bendsoe [9] and Sigmund [6] a heuristic updating scheme for the design variables can
be formulated as
xnewe =
max(xmin, xe −m)
if xeBηe ≤ max(xmin, xe −m),
xeBηe
if max(xmin, xe −m) < xeBηe < min(1, xe +m),
min(1, xe +m)
if min(1, xe +m) ≤ xeBηe ,
(3.18)
where m (move) is a positive move limit, η(=1/2) is a numerical damping coefficient and Be is found from
the optimality conditions as
Be =− ∂c∂xe
λ ∂V∂xe
, (3.19)
where λ is a Lagrangian multiplier that can be found by a bi-sectioning algorithm in order to satisfy a
volume constraint, so the volume constrain is already implicit in the algorithm of TO.
17
Page 36
The sensitivity of the objective function is found as
∂c
∂xe= −p(xe)p−1uTe k0ue (3.20)
Formulations of constrains
For the resolution of this topology optimization problem there are three constrains,
V (x)V0
= f
KU = F
0 < xmin ≤ x ≤ 1
(3.21)
The first two are equality constrains V (x) and V0 is the material material volume and design domain
volume respectively and f is the prescribed volume fraction. U and F are the global displacement and
the force vectors, respectively, K is the global stiffness matrix.
The last one is an inequality constrain, where x is the vector of design variables and xmin is a vector
of minimum relative densities(non zero to avoid singularity).
This problem have the fowling mathematical formulation:
minimize F (x) = (f1(x), f2(x))
f1(x) = c1(x) = [U ]T [K][U ] , f2(x) = c2(x) = [U ]T [K][U ]
subject toV (x)
V0= f
KU = F
0 < xmin ≤ x ≤ 1
(3.22)
3.4.4 Description of the Model 2
As it is said in the beginning of this chapter, the second model is an adaptation from the first model.
There are some parts of the algorithm that are similar but significant changes were performed and more
functions are used. The main code is in the file twoloads.m.
To initialize the problem there are three options.
The first option initializes the program putting in each element of the design domain (matrix nelx ×
nely) with the value of the volume fraction, this is the departure point to search for a set of nondominated
points.
In the second option it is possible to load a set of points and verifies which are dominated points and
eliminates them.
The third option of initialization is similar to the second option. In this option three points are carefully
chosen. This three points are taken from a single objective problem. Two points where only one load
18
Page 37
is applied and one point with the load from objective one and two, notice that the third point is also a
singular objective function where the two loads are applied.
In all options the values of the objective functions for the points are computed and saved in a list
called Flist, the design variables are in the list xlist and finally, are created a list with the step size
called alphalist.
After the initialization of the lists the main cycle starts. Fist of all two functions are called, topu and
topd. These function have six inputs, nelx and nely are the number of finite elements in the horizontal
and vertical direction respectively, volfrac is the volume fraction, penal is the penalization used in the
SIMP method, rmin is the filter size divided by the element size and x is the point where the search
departs to find a new point.
The output of these functions are the compliance value for the point x and the next point founded,
so the objective functions are calculated in this functions. topu is for the objective 1 and topd is for
the objective 2, both objectives are represented in figure 3.3. When these two functions are called it is
obtained the compliance values for the two objectives and two new points x1 and x2, the new points are
always with the same step size value, so in order to vary the step size it is done a calculation to reduce
or increase the step size using the fowling expression:
xnew = (xnew′ − xi)× alphalist(i) + xi (3.23)
, where xi is the point of departure, alphalist(i) is the corresponding coefficient of step size parameter
that can have positive values less or equal to 1, xnew′ is the point given by the objective function and
xnew is the new point founded using the step size parameter.
After having two new points, these points need to be checked, in order to realize if they are dominated
or nondominated. To do this there is the necessity to call again the function topu and topd for each point,
to know which are the values of the compliances for this point. Notice that in this case the new points
obtained by the functions are not used, so there is a computational waste since there are some calculus
done in the function that are not used.
With the values for the compliance the points are evaluated the same way as in the previous model.
These values for a point are stored in a vector called Ftemp and using the function paretodominance
the point is compared with the points stored in Flist. If the point is dominated by any of the points it is
discarded, if it is nondominated is added to Flist and all the points from Flist are checked to see if any
point is dominated by the new point, in this case the dominated points are discarded.
In order to increase the performance of the algorithm, when a point is successful added to our set of
nondominated solutions, a symmetric point is added turning upside down the columns of the matrix x.
Basically what happens when the columns are turned up side down, is that the material in the ele-
ments will change position to the symmetric position in relation to the blue line in figure 3.4.
Since the functions for both objectives are the same, what happens is that when a point is added to
the set of nondominated solutions, by performing the change in the columns a new point appears. This
new point in the space of objectives will be symmetric in relation to the bisectrix of the odd quadrants
19
Page 38
Figure 3.4: Illustrative Example
and the structure obtained is symmetric as it is possible to observe in figure 3.5, this simple method
makes the algorithm more efficient.
(a) Found point (b) Symmetric point
Figure 3.5: Illustrative Example
After the find two new points and evaluate them, the step size parameter is changed in case of
success it is increased two times otherwise it is decreased by half. To be considered a success at least
one of the two points need to be a nondominated solution.
Finally the last procedure done in the cycle is to choose the next point of departure, using the function
sort gamma that searches for the largest gap between two consecutive points and sorts the lists.
20
Page 39
Chapter 4
Results
In this chapter, the obtained results in this work are presented fowling the natural sequence of work.
First the results of the first model are presented and then for the second model developed. In each
model the results are presented fowling a criteria of complexity, starting from the simplest to the most
complex case.
Both models aim to optimize two objective functions. The first model search the optimal Pareto set for
two differentiable functions. While the second model also search for a optimal Pareto set of solutions to
minimize the compliance, maximizing the stiffness for a bidimensional structure subject to two different
objectives,these objective functions are the compliance for two different applied forces.
4.1 Problem Description and Results for Model 1
The first model gives a set of nondominated points for a MOOP, in the first examples tested the program
was simpler, with the increase of complexity in the following tested function emerged the necessity to
improve the efficiency of the code, since the code was taking too long to solve the problem.
The stop criteria for this solution is the maximum value in the step size parameter list, called alphalist,
that should be bigger than the tolerance(tolerance=0.001) or if the function is evaluated 1000 times. If
one of these criteria are achieved the program stops and plot the graph of the set of nondominated
solutions.
If the solution is not satisfactory it is possible to increase the number of evaluation in order to improve
the results.
4.1.1 Case 1
Find the optimal Pareto set of solution for the fowling problem:
minimize F (x) = (f(x), g(x))
f(x, y) = (1.5x− 2)2 + y2 , g(x, y) = x2 + 1.5y2
subject to − 5 ≤ x ≤ 5; −5 ≤ y ≤ 5
(4.1)
21
Page 40
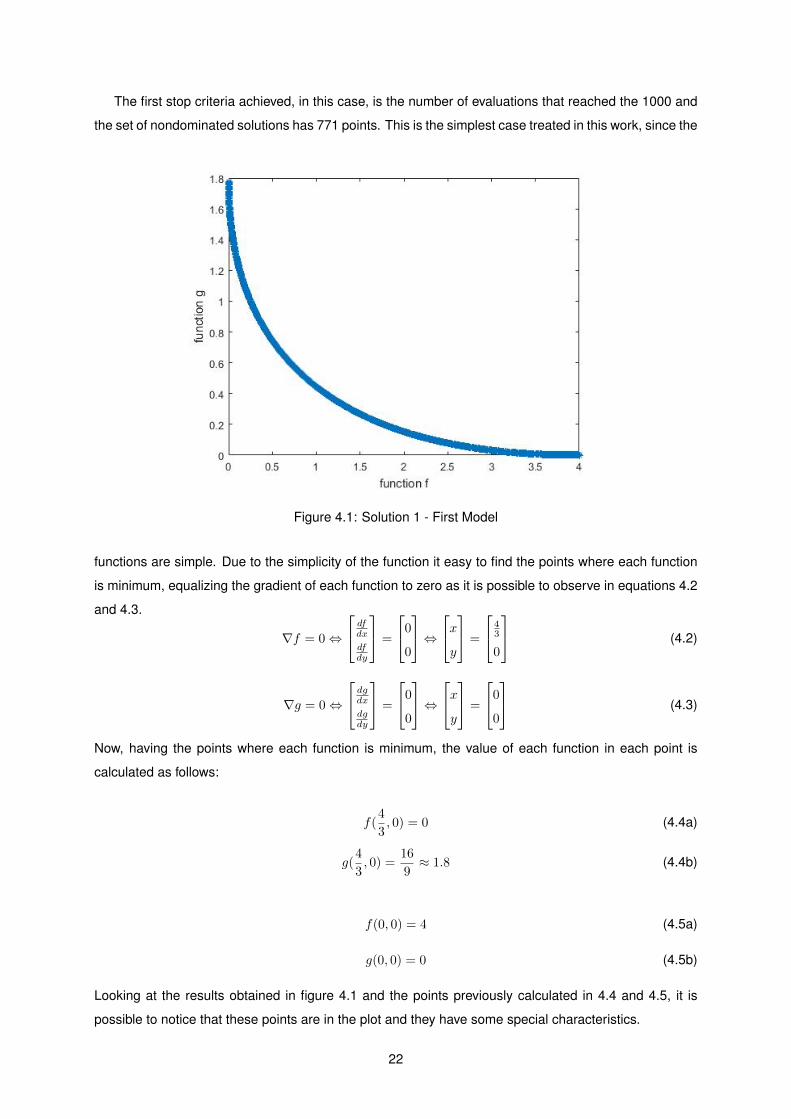
The first stop criteria achieved, in this case, is the number of evaluations that reached the 1000 and
the set of nondominated solutions has 771 points. This is the simplest case treated in this work, since the
Figure 4.1: Solution 1 - First Model
functions are simple. Due to the simplicity of the function it easy to find the points where each function
is minimum, equalizing the gradient of each function to zero as it is possible to observe in equations 4.2
and 4.3.
∇f = 0⇔
dfdx
dfdy
=
0
0
⇔xy
=
43
0
(4.2)
∇g = 0⇔
dgdx
dgdy
=
0
0
⇔xy
=
0
0
(4.3)
Now, having the points where each function is minimum, the value of each function in each point is
calculated as follows:
f(4
3, 0) = 0 (4.4a)
g(4
3, 0) =
16
9≈ 1.8 (4.4b)
f(0, 0) = 4 (4.5a)
g(0, 0) = 0 (4.5b)
Looking at the results obtained in figure 4.1 and the points previously calculated in 4.4 and 4.5, it is
possible to notice that these points are in the plot and they have some special characteristics.
22
Page 41
The point obtained from the gradient of the function f is where the function f has the lowest value
and where g is maximum, the same happens with the point obtained from the gradient of g, is where g
is minimum and f is maximum, as expected.
That the point obtained, for example from the equation 4.2, is the minimum for the function f it
was already known, but the fact that this exact point is also the maximum value for g, in the set of
nondominated solutions, it was not expected at first. I
If we take into account the PD concept this makes sense, since in a set of nondominated points there
is not a point that we can say that is better than other, when comparing two points if the first point is
better for one objective is worst for the other, so the point where one of the objectives is minimum it is
expected that the other objective is maximum.
4.1.2 Case 2
Find the optimal Pareto set of solutions for the fowling problem:
minimize F (x) = (f(x), g(x))
f(x, y) = x , g(x, y) = 1 + y2 − x− a sin(bπx)
subject to 0 ≤ x ≤ 1; −2 ≤ y ≤ 2
(4.6)
This multi-objective optimization problem is an example present in Deb [1], this function has some
curious solutions if you slightly change the parameters a and b, it is possible to obtain a convex and a
non convex Pareto front.
(a) Solution 1 (b) Solution 2
Figure 4.2: Case 2 - Expected solution from Deb [1]
Since this function can give such different solutions, it is an interesting test to verify if the program is
working correctly, with the available data about this problem is possible compare the solutions obtained
by the program developed for this work with the analytical solution.
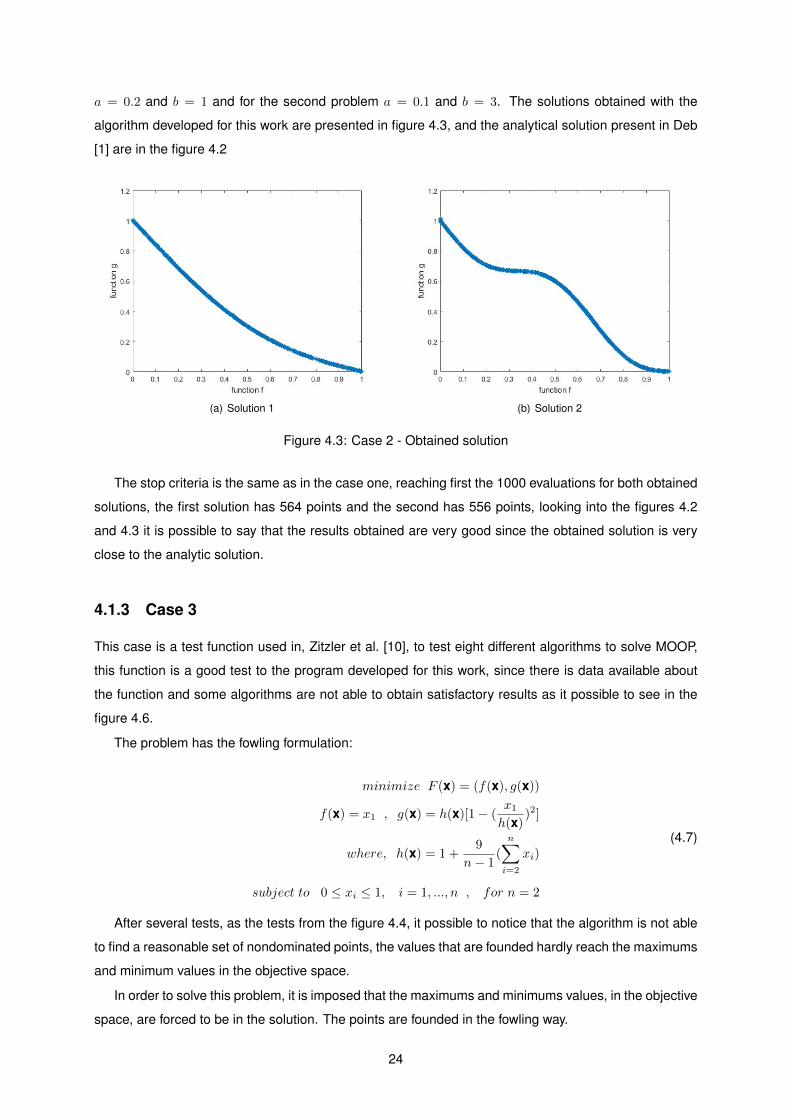
The two cases studied have the fowling values for the parameters a and b, the first problem is where
23
Page 42
a = 0.2 and b = 1 and for the second problem a = 0.1 and b = 3. The solutions obtained with the
algorithm developed for this work are presented in figure 4.3, and the analytical solution present in Deb
[1] are in the figure 4.2
(a) Solution 1 (b) Solution 2
Figure 4.3: Case 2 - Obtained solution
The stop criteria is the same as in the case one, reaching first the 1000 evaluations for both obtained
solutions, the first solution has 564 points and the second has 556 points, looking into the figures 4.2
and 4.3 it is possible to say that the results obtained are very good since the obtained solution is very
close to the analytic solution.
4.1.3 Case 3
This case is a test function used in, Zitzler et al. [10], to test eight different algorithms to solve MOOP,
this function is a good test to the program developed for this work, since there is data available about
the function and some algorithms are not able to obtain satisfactory results as it possible to see in the
figure 4.6.
The problem has the fowling formulation:
minimize F (x) = (f(x), g(x))
f(x) = x1 , g(x) = h(x)[1− (x1
h(x))2]
where, h(x) = 1 +9
n− 1(
n∑i=2
xi)
subject to 0 ≤ xi ≤ 1, i = 1, ..., n , for n = 2
(4.7)
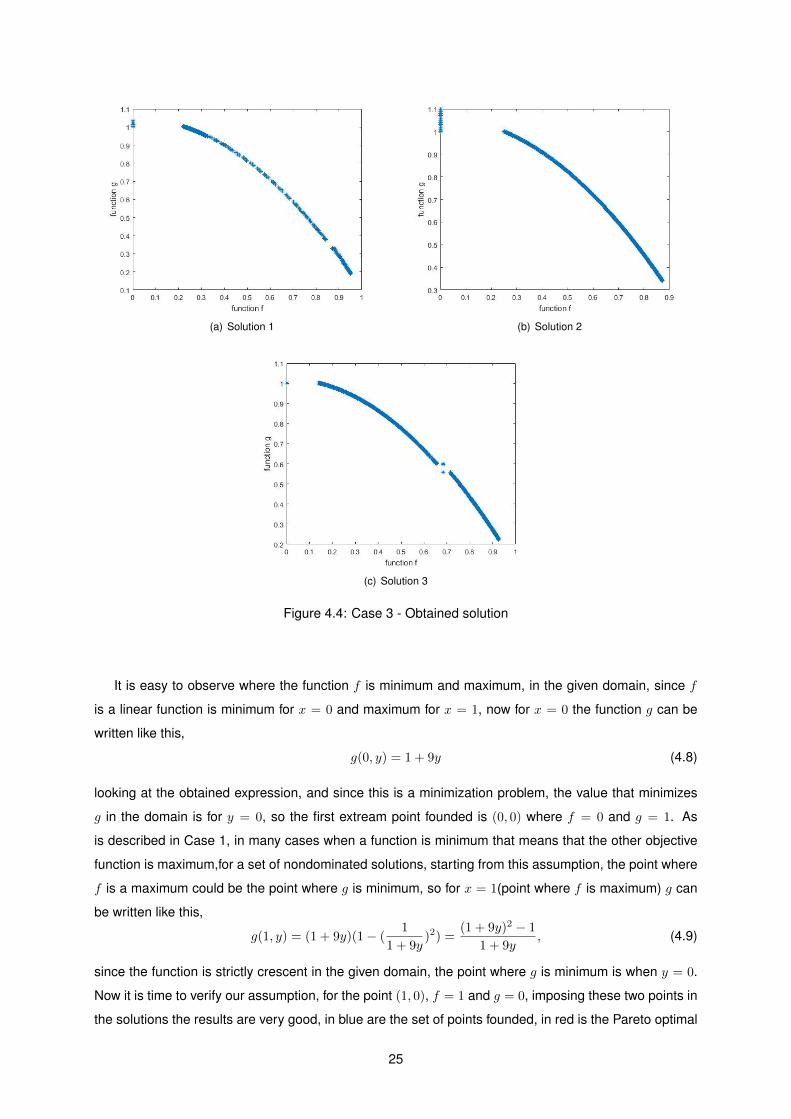
After several tests, as the tests from the figure 4.4, it possible to notice that the algorithm is not able
to find a reasonable set of nondominated points, the values that are founded hardly reach the maximums
and minimum values in the objective space.
In order to solve this problem, it is imposed that the maximums and minimums values, in the objective
space, are forced to be in the solution. The points are founded in the fowling way.
24
Page 43
(a) Solution 1 (b) Solution 2
(c) Solution 3
Figure 4.4: Case 3 - Obtained solution
It is easy to observe where the function f is minimum and maximum, in the given domain, since f
is a linear function is minimum for x = 0 and maximum for x = 1, now for x = 0 the function g can be
written like this,
g(0, y) = 1 + 9y (4.8)
looking at the obtained expression, and since this is a minimization problem, the value that minimizes
g in the domain is for y = 0, so the first extream point founded is (0, 0) where f = 0 and g = 1. As
is described in Case 1, in many cases when a function is minimum that means that the other objective
function is maximum,for a set of nondominated solutions, starting from this assumption, the point where
f is a maximum could be the point where g is minimum, so for x = 1(point where f is maximum) g can
be written like this,
g(1, y) = (1 + 9y)(1− (1
1 + 9y)2) =
(1 + 9y)2 − 1
1 + 9y, (4.9)
since the function is strictly crescent in the given domain, the point where g is minimum is when y = 0.
Now it is time to verify our assumption, for the point (1, 0), f = 1 and g = 0, imposing these two points in
the solutions the results are very good, in blue are the set of points founded, in red is the Pareto optimal
25
Page 44
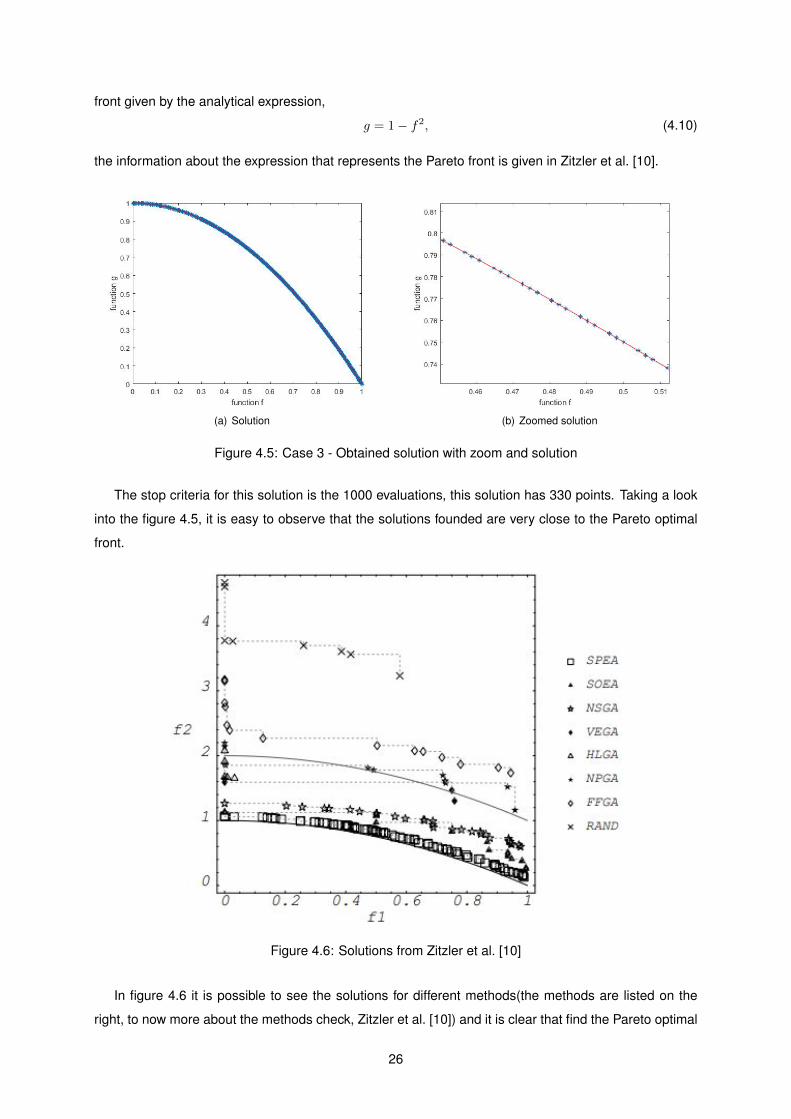
front given by the analytical expression,
g = 1− f2, (4.10)
the information about the expression that represents the Pareto front is given in Zitzler et al. [10].
(a) Solution (b) Zoomed solution
Figure 4.5: Case 3 - Obtained solution with zoom and solution
The stop criteria for this solution is the 1000 evaluations, this solution has 330 points. Taking a look
into the figure 4.5, it is easy to observe that the solutions founded are very close to the Pareto optimal
front.
Figure 4.6: Solutions from Zitzler et al. [10]
In figure 4.6 it is possible to see the solutions for different methods(the methods are listed on the
right, to now more about the methods check, Zitzler et al. [10]) and it is clear that find the Pareto optimal
26
Page 45
set for these functions it is not easy.
4.1.4 Case 4
This case is also a test function used in Zitzler et al. [10], to test eight different algorithms to solve the
MOOP, again this function is a good test to the program developed, because as the previous case there
is data available about this function and some tested algorithms by [10] were not able to find satisfactory
solutions, and the aspect of the expected solution is very different from all the cases shown in this work.
The problem has the fowling formulation:
minimize F (x) = (f(x), g(x))
f(x) = x1 , g(x) = h(x)[1−√
x1
h(x)− x1
h(x)sin(10πx1)]
where, h(x) = 1 +9
n− 1(
n∑i=2
xi)
subject to 0 ≤ xi ≤ 1, i = 1, ..., n , for n = 2
(4.11)
The results founded are present in, figure 4.7, the stop criteria for this solution is the number of
evaluations and this solution has 409 points.
Figure 4.7: Solution for case 4
Since there is useful data, the optimal Pareto front analytical expression from figure 4.7, lets compare
that information with the obtained solution. The expected optimal Pareto front analytical expression is
27
Page 46
the fowling:
g = 1−√f − f sin(10πf)
where,
f =
[0, 0.0830015349] ∪ [0.1822287280, 0.2577623634] ∪ [0.4093136748, 0.4538821041]
∪[0.6183967944, 0.6525117038] ∪ [0.8233317983, 0.8518328654]
(4.12)
Comparing the expected solution and the computed solution it is possible to say that the same
problem that appeared in case 3 are present here. The algorithm has difficulty reaching the tips of the
lines where the Pareto optimal set of solutions is.
This problem can lead to some results far from the Pareto optimal set, looking into the figure 4.8 b)
it is possible to notice that the solution obtained does not reach the tip of the line on the left side, that
allows several points to be in the nondominated solution that should not be there, as it is possible to
observe on the black circle in the figure 4.8 b).
(a) Solution vs expected solution (b) Zoomed solutions
Figure 4.8: Case 4 - Obtained solution with the expected solution and zoom
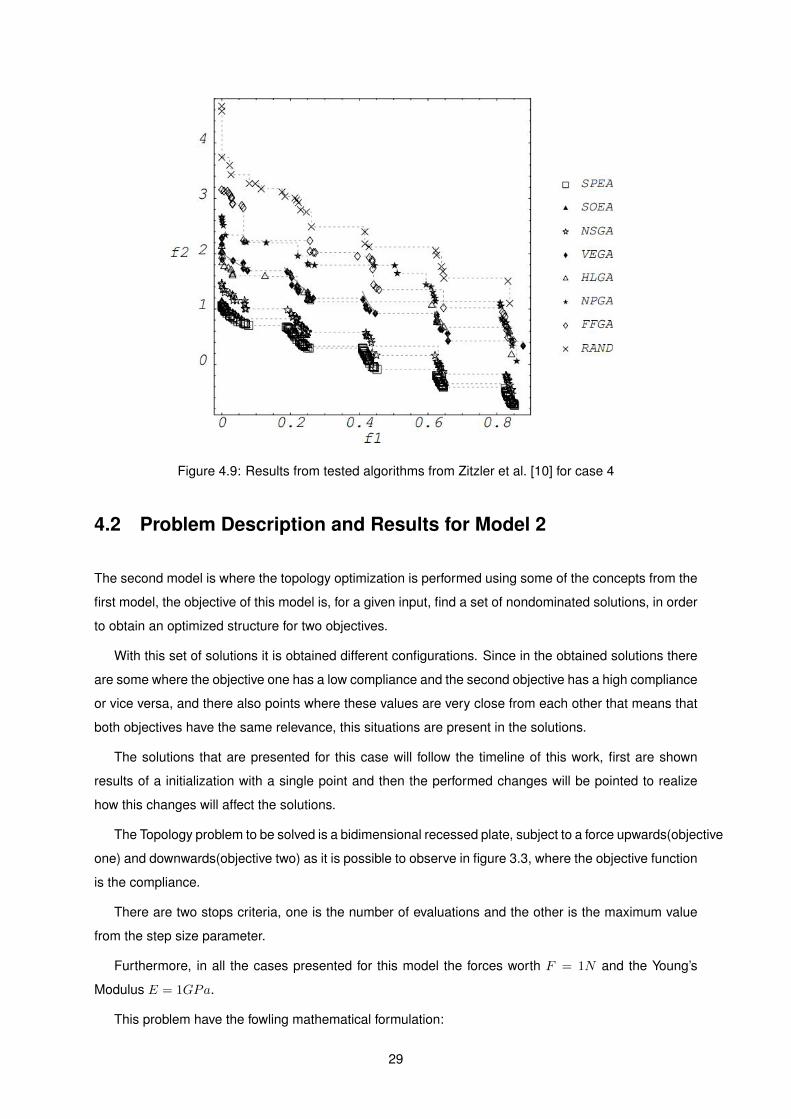
In figure 4.9 are presented the solutions from Zitzler et al. [10], obtained using different algorithms.
Although the identified problems, the solution obtained from the algorithm developed in this work is better
than the most of the solutions in figure 4.9 and it is close to the Pareto optimal set.
28
Page 47
Figure 4.9: Results from tested algorithms from Zitzler et al. [10] for case 4
4.2 Problem Description and Results for Model 2
The second model is where the topology optimization is performed using some of the concepts from the
first model, the objective of this model is, for a given input, find a set of nondominated solutions, in order
to obtain an optimized structure for two objectives.
With this set of solutions it is obtained different configurations. Since in the obtained solutions there
are some where the objective one has a low compliance and the second objective has a high compliance
or vice versa, and there also points where these values are very close from each other that means that
both objectives have the same relevance, this situations are present in the solutions.
The solutions that are presented for this case will follow the timeline of this work, first are shown
results of a initialization with a single point and then the performed changes will be pointed to realize
how this changes will affect the solutions.
The Topology problem to be solved is a bidimensional recessed plate, subject to a force upwards(objective
one) and downwards(objective two) as it is possible to observe in figure 3.3, where the objective function
is the compliance.
There are two stops criteria, one is the number of evaluations and the other is the maximum value
from the step size parameter.
Furthermore, in all the cases presented for this model the forces worth F = 1N and the Young’s
Modulus E = 1GPa.
This problem have the fowling mathematical formulation:
29
Page 48
minimize F (x) = (f(x), g(x))
f(x) = c1(x) = [U ]T [K][U ] , g(x) = c2(x) = [U ]T [K][U ]
subject toV (x)
V0= f
[K][U ] = [F ]
0 < xmin ≤ x ≤ 1
(4.13)
4.2.1 Case 1
The first present case intends to perceive how the penalization affects the result, to do this, three tests
testes are preformed with a mesh of 30 by 30 elements, volume fraction of 0.4, filter size of 1.2, the
same initialization,all the elements equal to the volume fraction, and a change in the penalization for
each test.
Figure 4.10: Pareto front behaviour with change in penalty
In figure 4.11 are represented the nondominated set of solutions, in the objective space, found for
the three performed tests , where p is the penalty used, in table 4.1 are the number of points found for
30000 evaluations each.
With the change of penalty it is possible to observe that the Pareto curve moves, then the higher the
penalty the greater the compliance. Now observing the obtained structures for each test in figure 4.11,
the increase in penalties have the expected effect on the structure, reduce the grey dots.
Gray dots are undesirable because they have intermediate densities, for this reason there are more
30
Page 49
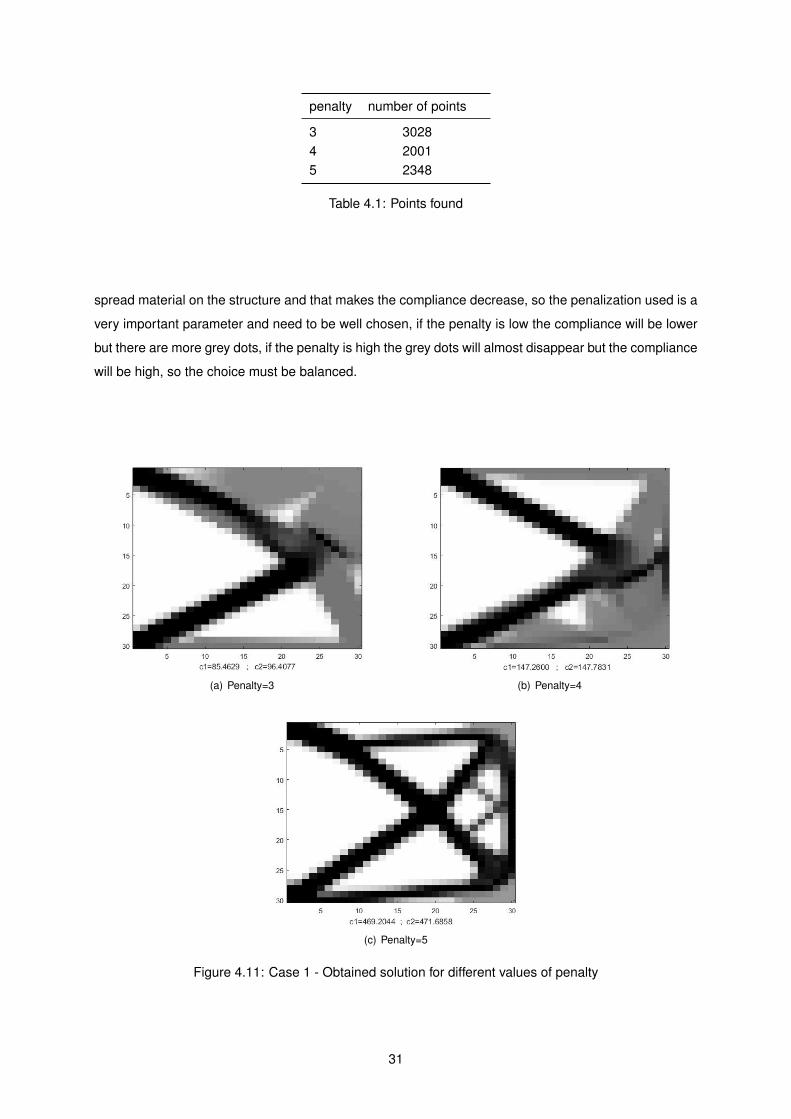
penalty number of points
3 30284 20015 2348
Table 4.1: Points found
spread material on the structure and that makes the compliance decrease, so the penalization used is a
very important parameter and need to be well chosen, if the penalty is low the compliance will be lower
but there are more grey dots, if the penalty is high the grey dots will almost disappear but the compliance
will be high, so the choice must be balanced.
(a) Penalty=3 (b) Penalty=4
(c) Penalty=5
Figure 4.11: Case 1 - Obtained solution for different values of penalty
31
Page 50
4.2.2 Case 2
In this case the solutions is obtained for a mesh of 20 by 30 elements, as it is possible to observe in figure
4.12, the penalty is equal to 3.5, the size of the filter is 1.5 and the stop criteria is 15000 evaluations.
(a) c1≈c2 (b) c1 >> c2
(c) c1 << c2 (d) Location of chosen points in front of Pareto
Figure 4.12: Case 2 - Obtained solutions
The solution obtained in this case is unexpected because it is different from all the other obtained
solutions during the tests, once all the other obtained solutions when two points where c1 >> c2 and
the other point c1 << c2 are chosen, the obtained solutions are almost symmetric. It is relevant to point
that the part of the algorithm that saves a symmetric point when a successful point is found was not
implemented when this solution was obtained otherwise this solution would not be possible.
Despite the solution at first glance may make you think there is something wrong, the explanation for
this solution is simple, the obtained structure is similar to the scheme in figure 4.13 and what happens is
that the force two is transmitted to the node where the force one is applied, basically behaves like a hang-
ing bar, that is why point a), b) and c) despite different values for the compliance the obtained solutions
are similar.
32
Page 51
Figure 4.13: Schematic example of the solution
4.2.3 Case 3
In this study case it is intended to evaluate the importance of initialization of the problem, to do this three
simulations for a single objective are performed in the program from Sigmund [6] . The first obtained
solution is performed with the two applied loads, the second with force one and the last one with forces
two in the plate, all this solutions are obtained with the same inputs, a mesh of 30 by 30 elements, filter
size of 1.2 and penalization equal to 3. The obtained solutions are present in figure 4.14
(a) c1=c2 (b) c1 << c2 (c) c1 >> c2
Figure 4.14: Points obtained using single objective optimization
Now with this data, three tests are performed in the algorithm developed for this work, notice that this
three points are obtained from a single objective solution and will be forced to be in the multi-objective
solutions. In the first test the program is initialized with points in figure 4.14 b) and 4.14 c), the second
with only point represented in figure 4.14 a) and a third test with all three points.
Observing the solution with the two points from figure 4.14 b) and c) represented in red in figure 4.15
it is possible to conclude that the algorithm was not able to find the best solutions for close values of
compliance, in the other hand for the points with high values in one objective and low for the other the
solution obtained is good as it is possible to see in figure 4.15 b). The other two solutions have good
results in the all domain, once they both are initialized with a point with the lowest values of compliance
where compliance1 = compliance2 = 30.6440, they have good solutions for close values of compliance.
With this it clear that the algorithm easily finds a good solution when an objective has very high or
low values, or in other words in the tip of the Pareto set, even a set of bad solutions if one objective is
considerate much more important than the other the solution obtained is good, see this example from
case 1, the solution with the closest values of compliance for both objectives is represented in figure
4.11, if the chosen point is where c1 is minimum and c2 is maximum the obtained solution is reasonable
as it is possible to see in figure4.16.
33
Page 52
(a) Nondominated solutions zoomed in low values of compli-ance
(b) Nondominated solutions zoomed in high values of compli-ance
Figure 4.15: Solutions obtained from three different initializations
Figure 4.16: Point from the tip of the Pareto front
Once again it is possible to conclude that the initialization of the algorithm is very important as it was
in the first model.
In figure 4.17 it is possible to observe how the structure configurations change along the Pareto front,
in image b) is one of the points used in the initialization where objective one is minimum but objective two
is maximum. Starting from a point where the compliances have similar values ,image c), and then chose
some points along one direction of the Y axe it is possible to observe how the structure is changing, the
points in the other direction are not represented once they are symmetric to these points.
34
Page 53
(a) Objective Space (b) Initial point from figure 4.14b) (c) c1=30.2 andc2=34.19
(d) c1=28.64 c2=115.2 (e) c1=28.15 c2=207.2 (f) c1=27.86 c2=303.8
Figure 4.17: Evolution of the structure along the Pareto Front
35
Page 55
Chapter 5
Conclusions
This chapter aims at exposing the conclusions drawn from the work developed in this thesis.
These are presented in a more global context, serving as a reflection on the whole process built
around the central question that defines the problem of multi-objective and topological optimization.
Based on the results presented in the previous chapter, it can be stated that the initial objective
proposed was successfully fulfilled. Build two computational models.
The first one was developed to determine the optimal Pareto front from two differentiable functions
using derivative methods and the second model was developed to determine an optimized structure to
two different objectives using the concepts from the first model to also find the optimal Pareto front for
two different objective functions.
5.1 Achievements
The results from the first developed model are very good since the obtained solutions match with ex-
pected solutions and were solved very fast. With exception of the last case that the results are slightly
different from the expected solutions but still good.
This results can be improved if the only stop criteria were the step size parameter but would take
more time to obtain the solution.
In case 3 and 4 there are data available from eight different algorithms tested by Zitzler et al. [10],
and comparing this solutions with the computed solution it is clear that the computed solution is better
than almost every solution from Zitzler et al. [10], with exception from one tested method that the results
are practically the same as the computed in this work.
In the second model the results were not so good as the ones from the first model.
This could be because of having a bigger objective domain, notice that the objective functions has
values of an order of magnitude from 10 to 108, while in the first models that magnitude were between
0 and 10. So to find a set of solutions in all the domain will require more evaluations of the objective
function being made to obtain a solution in the whole domain for this model.
37
Page 56
Another detail that makes this algorithm slower is that for a 30 by 30 mesh a point has 900 coordi-
nates, whereas in the first algorithm a point has only two coordinates.
Finally what slows down this algorithm even more is the analysis of finite elements that has to solve
many equations in every iteration.
For a topology problem it is important to choose well the all parameters. This decision should be
done by a decision maker with enough experience, for example, it is expected that the solution obtained
does not have gray dots. To this there is a need to change a penalization to a bigger value but if it is to
high the compliance will be high as well so this is a balanced choice that will require a decision maker
with experience in the field.
From the results of both models it is possible to conclude that a good initialization is very important
to obtain good results. Again, a decision maker with experience in the field is important to choose where
the algorithm will be initialized and what changes should be done, in order to, obtain a satisfactory result,
this makes the process of optimizations an iterative process.
Another interesting conclusion reached during the development of this thesis is that this technology
can give us an unconventional solution, as the solution from 4.2.2.
5.2 Future Work
Having into account the developed programs and the obtained results in this thesis, some proposals for
future work are presented here:
• Can be develop a tool that forces some points to be zero or one. This will be helpful if the technol-
ogy is used by a decision maker with relevant experience, for example with the obtained solutions
in figure 4.11 c), as it is possible to see in figure 5.1 inside the blue circle, there are some grey
dots and the black dots are in contact only in the node and, this is not a good configuration. Prob-
ably that area does not need to have material, with this tool a decision maker with experience
can force that area to be white helping the algorithm to find a better solution and less expensive
computationally, since those points will have always the same value.
Figure 5.1: Illustractive example from the solution obtained in figure 4.11
38
Page 57
• Improve the efficiency of the algorithm in order to achieve the step size stop criteria
• Adapt the algorithm to solve more than two objectives
39
Page 59
Bibliography
[1] K. Deb. Multi-Objective Optimization Using Evolutionary Algorithms. John Wiley & Sons, Inc., New
York, NY, USA, 2001. ISBN 047187339X.
[2] K. Miettinen. Nonlinear Multiobjective Optimization, volume 12 of International Series in Operations
Research & Management Science. Kluwer Academic Publishers, Boston, USA, 1999.
[3] J. S. Arora. Introduction to Optimum Design. Academic Press is an imprint of Elsevie, 3rd edition,
2011. ISBN:978-0128102831.
[4] A. L. Custodio, J. F. A. Madeira, A. I. F. Vaz, and L. N. Vicente. Direct multisearch for multiobjective
optimization. SIAM Journal on Optimization, 21(3):1109–1140, 2011. doi: 10.1137/10079731X.
URL https://doi.org/10.1137/10079731X.
[5] M. P. Bendsoe and O. Sigmund. Topology Optimization: Theory, Methods and Applications.
Springer, Feb. 2004. ISBN 9783540429920.
[6] O. Sigmund. A 99 line topology optimization code written in matlab. Springer-Verlag, 2001.
[7] M. P. Bendsøe and O. Sigmund. Material interpolation schemes in topology optimization. Archive
of Applied Mechanics, 69(9):635–654, Nov 1999. ISSN 1432-0681. doi: 10.1007/s004190050248.
URL https://doi.org/10.1007/s004190050248.
[8] P. W. Christensen and A. Klarbring. An Introduction to Structural Optimization. Solid Mechanics
and Its Applications. ISBN 978-1-4020-8665-6. doi: 10.1007/978-1-4020-8666-3.
[9] M. P. Bendsoe. Optimization of Structural Topology, Shape, and Material.
[10] E. Zitzler, K. Deb, and L. Thiele. Comparison of Multiobjective Evolutionary Algorithms: Empirical
Results. Evolutionary Computation, 8(2):173–195, 2000.
41