1 Abstract — The 3D robot simulation system COSIMIR ® (Cell Oriented Simulation of Industrial Robots) [1] is developed at the Institute of Robotics Research (IRF) in cooperation with industrial partners. The features of COSIMIR ® are covering the whole range of industrial workcell simulation. The common way of doing a simulation starts with the modeling of the integrated objects like robots, other mechanisms, e.g. conveyor belts and automated presses, and the objects surrounding the workcells, e.g. walls. The next step is the creation of the layout, especially the reachability analysis to determine the placement of the robotic manipulators and their workpieces. Afterwards the programs for the different means of automation are developed, tested, and optimized. This work is completely done in the simulation environment and is based on the defined model of the workcell, without using the physical robots. The final step is the download of the programs into the physical robot controllers on the shop floor. The innovative software system called COSIMIR ® Educational, which is presented in this article, especially focuses on the robot programming. The system is intended to be used as a training environment for robot programmers. Additionally, the COSIMIR ® Robotics Assistant, a multimedia teachware, was developed and integrated for educational and training purposes the. COSIMIR ® Educational is the winner of the Worlddidac Award 2002. See www.worlddidac.org/award/ for further information. Index Terms — Robot simulation, COSIMIR ® , COSIMIR ® Robotics Assistant, COSIMIR ® Educational, Robot offline programming. I. INTRODUCTION The requirements in education and training on industrial automation systems have grown continuously. New training concepts have to meet the demands in planning the workcell layout, programming the different means of automation, and detecting and handling errors during the production process. Especially for training purposes the simulation has proven to be a more and more valuable tool. It may be used as the first COSIMIR ® is a registered trademark of EF-Robotertechnik GmbH, Schwerte, Germany. See www.cosimir.com for further information. E. Freund is the head of the Institute of Robotics Research (IRF) at the University of Dortmund, Otto-Hahn-Str. 8, D-44227 Dortmund,. A. Hypki is with Institute of Robotics Research (IRF), University of Dortmund, and is the head of the department for “Communication Structures and Intelligent Systems” (telephone:+49 231 755-4643, e-mail: [email protected]). D. H. Pensky is with Institute of Robotics Research (IRF), University of Dortmund, and is the head of the department for “Industrial Automation” (telephone:+49 231 755-4644, e-mail: [email protected]). ICITA2002 ISBN: 1-86467-114-9 step to introduce robots and automation systems without any danger for the mechanical and electronic components ensuring absolute safety for the human operator. Additional advantages of simulation are the possibilities to produce any possible error situation without engaging the real workcell. The employed simulation systems have to fulfill all industrial demands on a close-to-reality simulation. The 3D simulation system COSIMIR ® , already placed successfully in a wide range of industrial applications, in combination with a robot programming teachware is a highly sophisticated environment to achieve an optimum in training and education. Fig. 1. User interface of the workcell simulation system COSIMIR ® The Institute of Robotics Research (IRF), Dortmund, develops the simulation system family COSIMIR ® for the whole range of modern simulation technology [2], [3], [4]. The systems integrate planning and optimization of the layout, the programming of the automation components including the upper control hierarchies, and the simulation of the entire workcell up to the program download into the real cell. This article presents the description of these systems and their integration in an educational concept to be an efficient tool for training as well. II. THE WORKCELL SIMULATION SYSTEM COSIMIR ® The 3D-simulation system COSIMIR ® was developed at the IRF. It is PC-based and is running under Microsoft Windows™. Due to its ergonomic user interface supporting the complete range of Windows standards (see Fig. 1) the training periods are minimized. Multimedia Robot Teachware based on 3D Workcell Simulation System COSIMIR ® E. Freund, A. Hypki, D. H. Pensky
Transcript
1
Abstract — The 3D robot simulation system COSIMIR® (Cell Oriented Simulation of Industrial Robots) [1] is developed at the Institute of Robotics Research (IRF) in cooperation with industrial partners. The features of COSIMIR® are covering the whole range of industrial workcell simulation. The common way of doing a simulation starts with the modeling of the integrated objects like robots, other mechanisms, e.g. conveyor belts and automated presses, and the objects surrounding the workcells, e.g. walls. The next step is the creation of the layout, especially the reachability analysis to determine the placement of the robotic manipulators and their workpieces. Afterwards the programs for the different means of automation are developed, tested, and optimized. This work is completely done in the simulation environment and is based on the defined model of the workcell, without using the physical robots. The final step is the download of the programs into the physical robot controllers on the shop floor. The innovative software system called COSIMIR® Educational, which is presented in this article, especially focuses on the robot programming. The system is intended to be used as a training environment for robot programmers. Additionally, the COSIMIR® Robotics Assistant, a multimedia teachware, was developed and integrated for educational and training purposes the.
COSIMIR® Educational is the winner of the Worlddidac Award 2002. See www.worlddidac.org/award/ for further information.
Index Terms — Robot simulation, COSIMIR®, COSIMIR®
The requirements in education and training on industrial automation systems have grown continuously. New training concepts have to meet the demands in planning the workcell layout, programming the different means of automation, and detecting and handling errors during the production process. Especially for training purposes the simulation has proven to be a more and more valuable tool. It may be used as the first
COSIMIR® is a registered trademark of EF-Robotertechnik GmbH,
Schwerte, Germany. See www.cosimir.com for further information. E. Freund is the head of the Institute of Robotics Research (IRF) at the
University of Dortmund, Otto-Hahn-Str. 8, D-44227 Dortmund,. A. Hypki is with Institute of Robotics Research (IRF), University of
Dortmund, and is the head of the department for “Communication Structures and Intelligent Systems” (telephone:+49 231 755-4643, e-mail: [email protected]).
D. H. Pensky is with Institute of Robotics Research (IRF), University of Dortmund, and is the head of the department for “Industrial Automation” (telephone:+49 231 755-4644, e-mail: [email protected]).
ICITA2002 ISBN: 1-86467-114-9
step to introduce robots and automation systems without any danger for the mechanical and electronic components ensuring absolute safety for the human operator. Additional advantages of simulation are the possibilities to produce any possible error situation without engaging the real workcell. The employed simulation systems have to fulfill all industrial demands on a close-to-reality simulation. The 3D simulation system COSIMIR®, already placed successfully in a wide range of industrial applications, in combination with a robot programming teachware is a highly sophisticated environment to achieve an optimum in training and education.
Fig. 1. User interface of the workcell simulation system COSIMIR®
The Institute of Robotics Research (IRF), Dortmund, develops the simulation system family COSIMIR® for the whole range of modern simulation technology [2], [3], [4]. The systems integrate planning and optimization of the layout, the programming of the automation components including the upper control hierarchies, and the simulation of the entire workcell up to the program download into the real cell. This article presents the description of these systems and their integration in an educational concept to be an efficient tool for training as well.
II. THE WORKCELL SIMULATION SYSTEM COSIMIR®
The 3D-simulation system COSIMIR® was developed at the IRF. It is PC-based and is running under Microsoft Windows™. Due to its ergonomic user interface supporting the complete range of Windows standards (see Fig. 1) the training periods are minimized.
Multimedia Robot Teachware based on 3D Workcell Simulation System COSIMIR®
E. Freund, A. Hypki, D. H. Pensky
2
COSIMIR® supports the simulation of entire workcells. This means that not only robot motion, but also the interaction of the robot with the environment is simulated realistically. Conveyor belts, dials, parts feeders, magazines, etc. are functionally integrated without any further programming. Even commonly used sensors like inductive and capacitive initiators, light barriers, optical and ultrasonic distance sensors, transceivers and transponders, etc. are entirely simulated. The range of simulated controllers is extended by the simulation of a number of different PLCs, either simulated by internal components or by linking to external applications, e.g. by using the industrially accepted OPC (OLE for Process Control) interface.
All electrical connections between real workcell components can be mapped to I/O connections of the simulated components for a comprehensive simulation. This correspondence between simulation and reality allows the direct transfer of robot programs developed in COSIMIR® into the robot controller. Native Language Programming (NLP) of different robot types is supported. Robot programs can be written in languages like IRL (DIN 66312), RAPID (ABB), KRL (KUKA), V+ (Adept/Staeubli), Movemaster Command, or MELFA Basic III and IV (Mitsubishi), etc. Learning a special purpose simulation language (in addition to the robot programming language) is not necessary because the robot’s native programming language is also used to program robots within the COSIMIR® environment. While programming the user is supported by language specific online help systems and programming wizards. Automatic functions fulfill basic tasks in programming, e.g. generation of the program skeleton, declaration of inputs, outputs as well as robot positions. Additionally, the programming wizard is able to generate a whole program automatically based on the positions stored in a position list. This program is error free and can be simulated immediately without changes by the user. In many cases automatic generation of program is the first step to retrieve a working program adapted to a specific task. COSIMIR® provides powerful tools for syntax checking as well as for the testing of robot programs. The source code tracing during the simulation cycle is supported. Another efficient feature for program development and test is the single step mode. The developed robot programs can directly be transferred to the robot controller (download). The use of programs that have been created or modified on the controller is also possible (upload).
III. THE COSIMIR® ROBOTICS ASSISTANT – A MULTIMEDIA
TRAINING COURSE
In order to be able to use a robot simulation system efficiently some fundamental knowledge from the area of robotics is indispensable. The COSIMIR® Robotics Assistant makes the user familiar with necessary basic knowledge and gives an overview of automation with robots. If you use robots in industrial applications, you have to consider some things from other fields than robotics itself. The peripheral devices,
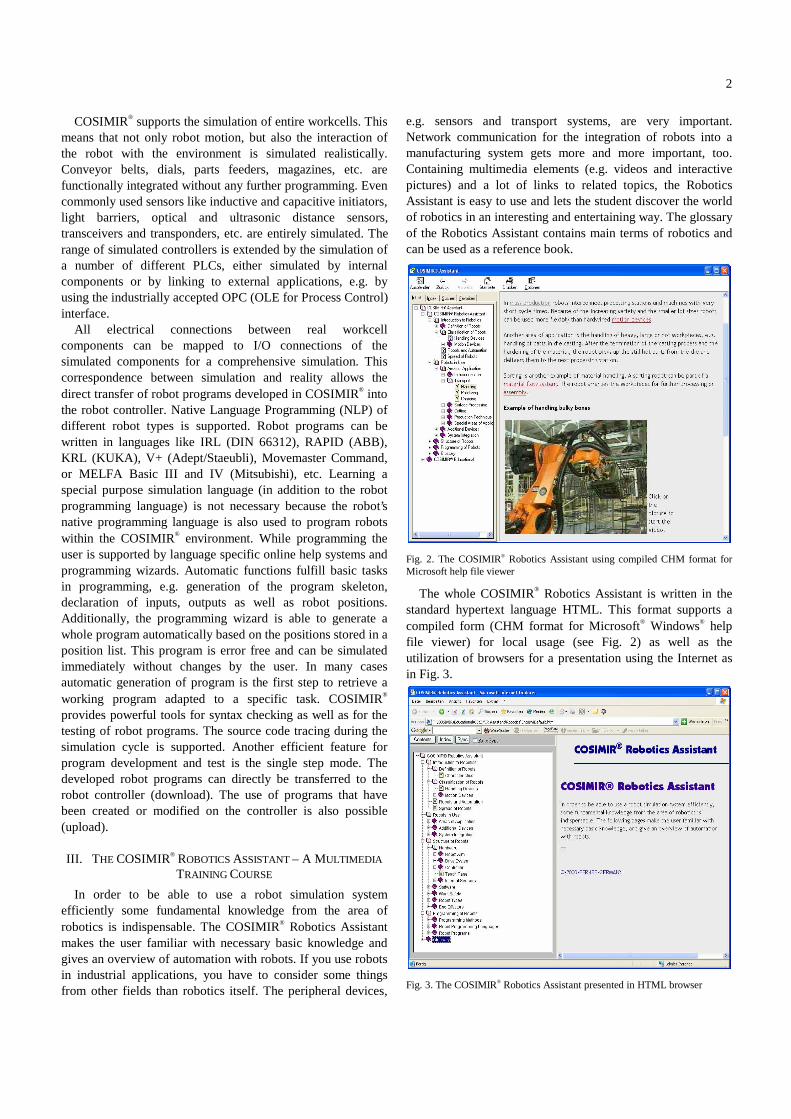
e.g. sensors and transport systems, are very important. Network communication for the integration of robots into a manufacturing system gets more and more important, too. Containing multimedia elements (e.g. videos and interactive pictures) and a lot of links to related topics, the Robotics Assistant is easy to use and lets the student discover the world of robotics in an interesting and entertaining way. The glossary of the Robotics Assistant contains main terms of robotics and can be used as a reference book.
Fig. 2. The COSIMIR® Robotics Assistant using compiled CHM format for Microsoft help file viewer
The whole COSIMIR® Robotics Assistant is written in the standard hypertext language HTML. This format supports a compiled form (CHM format for Microsoft® Windows® help file viewer) for local usage (see Fig. 2) as well as the utilization of browsers for a presentation using the Internet as in Fig. 3.
Fig. 3. The COSIMIR® Robotics Assistant presented in HTML browser
3
Beside the navigation within the Assistant using the navigation tree, the viewers provide an index search as well as a full-text search. Also, printing of whole chapters or parts of the Assistant is supported. For an optimized usage of the help system, favorites can be added within the help file viewer. These shortcuts to visited help topics accelerate the process of recovering important topics of the user’s work.
IV. SYSTEM STRUCTURE AND TRAINING PROCESS
For an efficient training a combination of COSIMIR® and COSIMIR® Robotics Assistant was designed and implemented to provide an intuitive operation during the whole training process. The main goal is a step by step realization of robot programs for different workcells and finally the integration of all these single workcells into the simulation of a complete plant, including all the different steps of a production process including transport, painting, mounting, testing, and packaging.
&26,0,5� 6LPXODWLRQ�6\VWHP
&26,0,5� 5RERWLFV $VVLVWDQW
3URJUDPPLQJ�3ULQFLSOHV3URJUDPPLQJ�3ULQFLSOHV
5RERWLF%DVLFV5RERWLF%DVLFV
6LPSOH:RUNFHOOV6LPSOH:RUNFHOOV
:RUNFHOOVRI�3ODQW:RUNFHOOVRI�3ODQW
$GYDQFHG3URJUDPPLQJ$GYDQFHG3URJUDPPLQJ
3ODQW�6LPXODWLRQ3ODQW�6LPXODWLRQ
Fig. 4. Structure of training process
The structure of the training process is presented in Fig. 4. The training starts with an introduction to robotics and with the presentation of the usage of robots in industrial applications, e.g. transport, surface processing, and cutting technologies. Beside kinemactical basics the next section focuses also on aspects of robot control, path planning, and
typical safety installations of robot controllers. The area of robot programming starts with programming principles and techniques. The basics of robot program structures, program flow (e.g. loop programming and branch instructions), and the definition of robot movement operations as well as I/O interaction are trained by using an industrial robot language. The programming part ends up with advanced programming techniques like modular programming and multitasking realizations to solve even complex manufacturing processes. These first sections are absolutely necessary to get an impression of robots and the possible applications, and they are supported by multimedia elements like videos of the described samples.
The first connection between the COSIMIR® Robotics Assistant and COSIMIR® arises while doing the programming of simple robot applications. The assistant gives a description of the workcell and a sample animation of the task to be executed. The COSIMIR® Assistant provides detailed help on the workcell models starting with an overview of the know-how that the user obtains while working on the model. The starting page of the help on a workcell model (Fig. 5) also gives the chance to open a video of the running workcell to demonstrate the expected result of programming. Afterwards, the description of the workcell and its components follows. Furthermore, there are a table of all I/O connections and a recipe for programming to facilitate starting work (Fig. 6).
Fig. 5. Help on model “Disassembly”
The predefined model is launched from the assistant, means the workcell is loaded into COSIMIR®. The student is now able to do the robot programming, taking full benefit of the COSIMIR® tools, e.g. for syntax check, program test run, and collision detection. This cycle of programming covers the range from pick and place applications, sensor integration, surface painting [5], object handling, and packaging up to22 programming multi robot workcells and PLCs. Especially, all programming operations needed to program the single workcells of the complete plant are trained. During the whole
4
cycle from teaching robots to writing complete robot controller programs the user is supported by a context sensitive online help system.
Fig. 6. Programming of model “Disassembly”
The next step is the integration of the single workcells into a model containing the complete plant and the development of a plant controller, which is responsible for the material flow and the coordination of the different production steps.
Fig. 7. Building up the plant from the single workcell models
V. FROM WORKCELL SIMULATION TO PLANT SIMULATION
The hierarchical library concept of COSIMIR® allows the modular integration of workcell models into a superimposed model. Thus, the simulation model of a whole factory can be built by combining several workcell models.
Fig. 7 shows the integration of different workcell models in the superimposed factory model. On the one hand, each workcell can be placed inside of the factory model. On the other hand, it is possible to integrate models several times. Within COSIMIR® Educational there are seven workcell models for the different production steps characterized by different degrees of difficulty. These workcells are listed in Table I.
MODEL DESCRIPTION KNOW-HOW DIFFICULTY
Workshop Simple robot movements
• Programming in IRL and MRL
low
Storage Automatic storage system
• Programming in IRL using functions
• Storage Management
medium
Production Work piece production
• Programming in IRL
• Control of complex machinery
high
Paintshop Laquering of work piece
• Programming in MRL
• Usage of tool exchange systems
high
Assembly Assembly system • Programming in IRL and MRL
• Management of several robot workplaces
high
CheckPack Quality check and packaging
• Programming in MRL
• Usage of several mechanisms
medium
AGV Autonomous Guided Vehicle
• Programming in IRL using procedures
• Analysis of sensor data
medium
Plant-Simulation
Superimposed factory model
• Communication to superimposed Controller
high
Table I: The different sample workcells for the plant simulation
These workcells are combined to the superimposed factory model. The arrangement of the workcells within the factory is independent from the position of the object in the single workcell model. Due to this fact, it is possible to rearrange the workcells in the factory model, either to optimize material flow or to run serial production steps parallel. Because COSIMIR® supports the integration of one workcell multiple times, it is also possible to add the workcell executing a complex production step another time to realize a parallel processing, means to reduce cycle time of the whole production line. The user of COSIMIR® Educational has to take into account that because of the complex system he has to develop different solutions that are conceivable, but in most cases there is just one presenting the optimal solution. Moreover, while finding a solution to the problem the user has to respect some boundary conditions that are given, e.g. economic aspects.
5
Fig. 8. I/O connections in Model Explorer view of factory model
After successful programming of the stand-alone workcells and optimization of the factory layout the user has to fulfill the task to integrate the workcell programs into the superimposed factory model. For coordination of the different production steps, a superimposed controller is to be developed which is connected to the controllers of the workcells via digital and analog inputs and outputs (see Fig. 8). Additionally, the user has to implement handshake procedures which represent sequences of reading and setting the communication inputs and outputs. Because the superimposed controller decouples several stations, maintainability and reusability are optimized.
VI. FROM COSIMIR® EDUCATIONAL TO COSIMIR® FACTORY
The described system COSIMIR® Educational is fully integrated into the COSIMIR® Manufacturing concept. Each single component of COSIMIR® Manufacturing covers a step on the way from robot programming up to simulation and control of complete industrial plants.
The first step is the writing and testing of the robot programs. This step is done for each single robot and may be completely done within the COSIMIR® Educational environment. The next system involved is COSIMIR® Professional, which supports the programming of the other automation components like PLCs and material flow controllers. Additionally, COSIMIR® Professional allows the simulation of the whole workcell including multiple robots, PLCs, and conveyor belt systems. During this simulation the integrated collision detection checks for collision-free robot movements. Furthermore the download of the developed robot programs into the physical robots on the shop floor is executed by COSIMIR® Professional. This sequence is shown in Fig. 9. Therefore COSIMIR® Professional is the communication interface between the simulation environment and the real workcell. During the operation of the robots and PLCs COSIMIR® Professional provides powerful tools for robot diagnostics.
Fig. 9. Combination of COSIMIR® Educational, COSIMIR® Professional, and the physical workcell
For optimization of production processes, a powerful connection between simulation and control system is imperative. Thereby all overlaid programmable coordination procedures can be developed using the simulation. For that purpose the real components are not needed. Therefore the next step is the integration of a sophisticated production controller. To achieve highest product flexibility in combination with an intuitive user interface and an optimized use of the integrated components COSIMIR® Control was developed [6]. COSIMIR® Control provides different types of communication systems, e.g. TCP/IP, OPC, Profibus, and serial interfaces to build up the connection and to control both
6
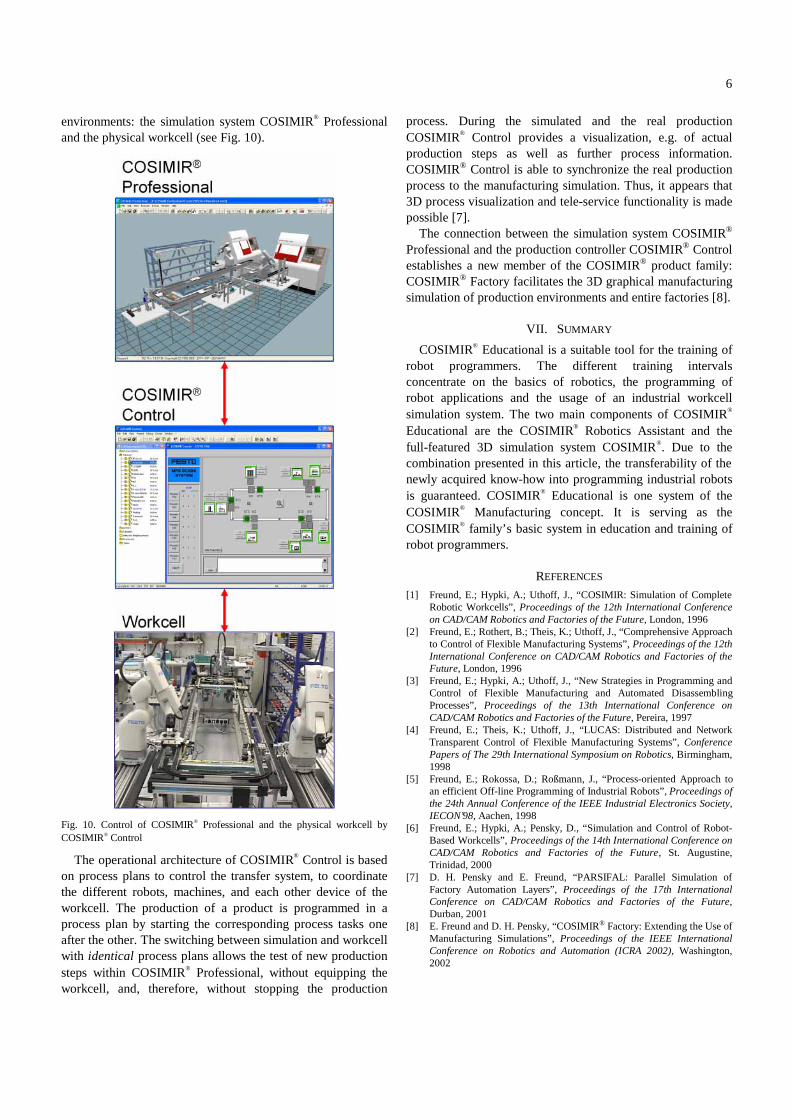
environments: the simulation system COSIMIR® Professional and the physical workcell (see Fig. 10).
Fig. 10. Control of COSIMIR® Professional and the physical workcell by COSIMIR® Control
The operational architecture of COSIMIR® Control is based on process plans to control the transfer system, to coordinate the different robots, machines, and each other device of the workcell. The production of a product is programmed in a process plan by starting the corresponding process tasks one after the other. The switching between simulation and workcell with identical process plans allows the test of new production steps within COSIMIR® Professional, without equipping the workcell, and, therefore, without stopping the production
process. During the simulated and the real production COSIMIR® Control provides a visualization, e.g. of actual production steps as well as further process information. COSIMIR® Control is able to synchronize the real production process to the manufacturing simulation. Thus, it appears that 3D process visualization and tele-service functionality is made possible [7].
The connection between the simulation system COSIMIR® Professional and the production controller COSIMIR® Control establishes a new member of the COSIMIR® product family: COSIMIR® Factory facilitates the 3D graphical manufacturing simulation of production environments and entire factories [8].
VII. SUMMARY
COSIMIR® Educational is a suitable tool for the training of robot programmers. The different training intervals concentrate on the basics of robotics, the programming of robot applications and the usage of an industrial workcell simulation system. The two main components of COSIMIR® Educational are the COSIMIR® Robotics Assistant and the full-featured 3D simulation system COSIMIR®. Due to the combination presented in this article, the transferability of the newly acquired know-how into programming industrial robots is guaranteed. COSIMIR® Educational is one system of the COSIMIR® Manufacturing concept. It is serving as the COSIMIR® family’s basic system in education and training of robot programmers.
Robotic Workcells”, Proceedings of the 12th International Conference on CAD/CAM Robotics and Factories of the Future, London, 1996
[2] Freund, E.; Rothert, B.; Theis, K.; Uthoff, J., “Comprehensive Approach to Control of Flexible Manufacturing Systems”, Proceedings of the 12th International Conference on CAD/CAM Robotics and Factories of the Future, London, 1996
[3] Freund, E.; Hypki, A.; Uthoff, J., “New Strategies in Programming and Control of Flexible Manufacturing and Automated Disassembling Processes”, Proceedings of the 13th International Conference on CAD/CAM Robotics and Factories of the Future, Pereira, 1997
[4] Freund, E.; Theis, K.; Uthoff, J., “LUCAS: Distributed and Network Transparent Control of Flexible Manufacturing Systems”, Conference Papers of The 29th International Symposium on Robotics, Birmingham, 1998
[5] Freund, E.; Rokossa, D.; Roßmann, J., “Process-oriented Approach to an efficient Off-line Programming of Industrial Robots”, Proceedings of the 24th Annual Conference of the IEEE Industrial Electronics Society, IECON’98, Aachen, 1998
[6] Freund, E.; Hypki, A.; Pensky, D., “Simulation and Control of Robot-Based Workcells”, Proceedings of the 14th International Conference on CAD/CAM Robotics and Factories of the Future, St. Augustine, Trinidad, 2000
[7] D. H. Pensky and E. Freund, “PARSIFAL: Parallel Simulation of Factory Automation Layers”, Proceedings of the 17th International Conference on CAD/CAM Robotics and Factories of the Future, Durban, 2001
[8] E. Freund and D. H. Pensky, “COSIMIR® Factory: Extending the Use of Manufacturing Simulations”, Proceedings of the IEEE International Conference on Robotics and Automation (ICRA 2002), Washington, 2002