105


NARMA-L2 NEUROCONTROLLER FOR NONLINEAR SYSTEM
Mr. Kittisuk Srakaew
A Thesis Submitted in Partial Fulfillment of the Requirements
for the Degree of Master of Engineering Program in Mechanical Engineering
Department of Mechanical Engineering
Faculty of Engineering
Chulalongkorn University
Academic Year 2008
Copyright of Chulalongkorn University


~ A G ~ u f131iif% : ~?n?uqu~?~5u i~~ i - i i ~n~~ i~?u~ruu 'b~ i%9 idu . (NARMA-L2
NEUROCONTROLLER FOR NONLINEAR SYSTEM)
o . d ~ n ~ i ~ n u i i i n u i : 3n.ns.iaGu iYuniieity, n& 91.

# # 487064642 1 : MAJOR MECHANICAL ENGINEERING
KEYWORDS : NARMA / NEURAL NETWORK / NEUROCONTROLLER
KITTISUK SRAKAEW : NARMA-L2 NEUROCONTROLLER FOR NONLINEAR
SYSTEM. ADVISOR : ASSOC. PROF. RATCHATIN CHANCHAROEN, 91 pp.
This thesis designed and implemented the NARMA-L2 neurocontroller to control
nonlinear systems including water tank system and nonlinear pendulum system. The NARMA-L2
neurocontroller, first, learns and models the nonlinear system, then is recanfigured to be a
controller that eliminates both the nonlinearity and dynamic behavior of the system. The
NARMA-L2 neurocontroller computes the control effort based on reference position and the
actual position and its past value. Once the system eliminates the nonlinearity and dynamic
behavior, the closed loop system becomes implicit algebraic relation between the reference
position and the actual position. This means that the actual position do follow the reference
position in real time. Normally, there is a time delay between the control effort and the reference
position in the calculation, i.e., the current control effort controls the actual position to match the
reference position in the future time step.
In the first experiment, the NARMA-L2 neurocontroller is used to control the water tank
system that its cross section varies. The NARMA-L2 neurocontroller cannot eliminate the
dynamic efficiently in this case. The remedy is that the predefine dynamics is installed back to the
system such that the closed loop dynamics is as defined The NARMA-L2 neurocontrolller
combined with predefined dynamic is able to stabilize the system and also control the system
follow a desire trajectory.
In the second experiment, the NARMA-L2 neurocontroller is used to control the
pendulum system. In this case, the NARMA-L2 neurocontroller is able to eliminate nonlinearity
and dynamic of the system, and thus, able to perfectly control the system to follow a smooth
reference trajectory that is generated in real time using input device.
Department:. . .. . . -. . . M K M . ~ . . E~&.mhgg g g g -Student's
Academic Year: - - - - 20R8



d Y W W 5 f l l S W F l n 8 4 .......................................................................................................................... 50




E 3
3 rr) 60
G 6 b d 2 3 5 e e
I2
I2 2e
+IC
s 5. ze
pr 2 - 2 3'-
zb.
a
se
e)
d
e) e
3 z zn 5
ee
=u
5
M, 2 3 3 2 E



Y
~uilocl~u!~m~~~r~uunauquiiuud~~uoJ"~n'u~tii~ii~inniun'~bu~~nnn~~un~~ d 31d WSR b.r!dAi in%~.ru~u rouu.' i ~ ~ u p i ~ ~ n ~ & n ~ o t ~ a l d d ~ d ! h i u n f a d o u n I a u n ~ ~ f i ~
s~uunauqlniuuQfuoJ"Z (Automatic System) u ids~~na4 uiniidf~ouds:uu~?o~dnrd A 94
diqq dnaiu~u~~u~iirnr~iudonisooniiuu~anauqu iiddouimol~unirw'~ui~nm1u~n"u
~ I P Y ~ ~ ~ ~ R Q ~ ~ ~ U Q ~ A Q ~ ~ ~ I ~ ~ U ~ S B ~ % O ~ O J ~ P I ~ % X ~ ~ ~ I ~ ~ ~ Z R ~ ~ ~ ~ ~ I ~ I ~ ~ Z I I ~ Q R ~ ~ ' ~ ~ ~ ~ R iqwn
9 4 2 a l G r ~ u u d 1 ~ ~ ~ u u n a 1 u G u 4 o u $ 1 u i ~ ~ ~ a ~ ~ u ~ r ~ 1 u ~ ~ ~ a i u 4 u G ~ u Iriffiuirodi~iul&~ti~~ A' A ddsrBnZnin~q~ r i ~ l ~ i i m ~ r i R l u i ~ n ~ s ~ a u ~ u i i u u d ~ ~ q ~ ~ u ~ i ~ ~ n a u q u n ~ ~ r i i ~ ~ u ~ ~ ~
r d a Y 4 1 , rruu iianuuo8iti~R.rqnaia'linismauquiiuu~qi3ui~u (Conventid COIWOI) 8i&1(iU
Hurnr81no~szuu (Mathematics Model) d~n?iu~u#oulmz!dI~ui?9i~u (Nonliuear) uin
domr~in~rn~iino~rzuu ii~lliiirnmmuiu~i%ni.rnauqui~uuIni ~rnui3n~mm3tiu
~ ~ ~ ~ ~ ~ ~ ~ ~ I ~ ~ ~ ~ Q u I ~ ~ ~ u L ~ ; I L ~ u I A Q ~ ~ I . J ~ J ~ ~ B M Z ~ I W I ~ % ! d ~ i ~ ~ u b i o ~ ~ ~ ~ ~ ~ 1 ~ 8 1 ~ ~ . j
uinmr8qinqrii (observation) isuuf (learning) 6inu~n~aold (Logic) ut!'adfu&nir
A ? u ~ u ~ M % . ~ (Adaptation) ~#inuizrm~h31uu &i~u%nlrd~ y Y ~ ~ ~ U ~ I S ~ ~ Y ~ ~ ~ S Z Y ~
6-147 ~ ~ u ~ i b i i ~ u d i o ~ f ~ a f f u n i s 6 1 n ~ a rruu~fliuiramap~qu~zu~ !k ;o~ i .~ddr t~n~ni~ 9
d 2 4 nnnaiurnlnsnlup~iiv~quy$~uu o~l&dmrricuuiRimauquiiuuu'iu~iuu"as'n ( ~ e y r a l -

J.rrlnaiiuuiiaot (system Identification) i i~jQiuuuiian~dl~uinfi~Kanauqu (control B da
Design) si?nauqu~?~~i iuunu~woJwaiu~iui~n~um~nauqurzuu~i~~idu~~naiu
~u'ubu18oEi1.rijJrz8~5niw n'osi?n?quu'?ls NARMA-L2 J~iin~iurnui~n~uni~nauqu pl r dpl
~ ~ I ~ R U ~ P J Z U U ~ ~ ~ I ~ 8 q * 0 d D d ~ ~ i ~ ~ 6 q ~ d ; ~ q n ~ ~ ~ m ~ ~ ~ q ~ ~?uni3iiiu?~~~qsiOo93 zuu
dmuirnuii?u~niswi~~~w~w"m (Algebraic) o ~ ~ R ~ ~ u ~ u I ~ ~ ~ u ~ J ~ ~ ~ ~ ~ ~ ~ ' L ~ I ~ ~ ~ v ~ ~ 4dd 9)
rzuutmRluiu??nnRotfllr (Trajectory Following Control) ~ 9 ~ 1 ~ 1 3 n ~ l ( i ? ~ ? ~ q ~ ~ ? ~ 5 9 dsr
NARMA-L2 w ~ ~ U ~ I ~ ~ ? ~ ~ ~ ~ & ~ ~ ~ I S ~ ~ P I ~ O J I M ' S L P I P I R ' R R I ~ ~ I ~ u ~ I ~ ~ ~ M P ~ ~ ~ ~ I ~ Phl61114 .
hmfoa CNC d~04ni31iiii?fi~ k ~ u ~ i u ~ ~ ~ i ~ i ~ u a ~ # ~ ~ i ~ d i i i n u n nforhldl#riu
y'uuucig~flnnJrulua'n~az Master - Slave ~0n0ln~u&~Ul5nii11d1<n'un13n~uq35
iiuu ~y-wire U O ~ J O U U ~ I u n ~ ~ n a u ~ u a i a a " ~ n ~ ~ d ~ ~ w ' ~ ~ n ~ f i ~ i o ~ ~ u ~ ~ ~ nf oni3nauqumr r 2 st
~~uauotmmiurr~.~u--ta'u i i lw'dsr3wirnnlum3~u~~nuum~~~1~~ i~a&&qdaunclsiurlu
usqTngluni~ w z m
3nuiiinui6qzrhni34npIinni~mtln3ruuoqsiiuqiuiia?a 'i~m~prhshu~iuu'?ir,~?ti
1wdo1~1~iiiu~iudmuiznuBi~ni~I4~iu unziiin?iu~d~#uioorniuusi?nau~uiiaI~
NARMA-L2 ~ ~ d ~ ? i u m u i ~ n ~ i ~ d d ~ z ~ n ~ ~ ~ w a u q u n " u ~ ~ u u 1 ~ 6 ~ f i n ( i ~ ~ ~ ~ ~RUAII
rzuurmmnounaiuniai~nuo~~ana~qulun~~iiIw'~ruud~n~u~niw (Stabilkation) unr
n ? i ~ ~ i ~ 3 n ~ ~ m m ? u ~ 3 1 ~ $ 3 ~ ~ ~ 1 ~ ~ ~ 1 1 1 1 i L ~ a ~ ~ ( Trajectoly Following Control)


9
2ntnu'wui$iiqi;oMii$uiqMum 6 un TjU I mncru?n und i nii~dqduinn::
n~iudin'oluoqilyvi r~u&i~~dr-nt&iaz%nir61iGunir~o"v und 2 nd 13 dqd 3 Y G
aiu?fd~dnu?boc im:i~u~~ic~urnrr i i~~u und 3 nr i i?~an~u~&~iuuaa i iua iuGa~n
noiilnunssu f l ~ n u ~ ~ l m Y % ~ i r ~ b ~ b i ~ p ~ ~ a ~ a p ~ f l ~ ~ a ~ ~ NARMA-LZ uni 4 i~um5hna.a
n?uqus-~ufi.ldn~~<R7~ojnqd ila-rzuu~d'inotoj und 5 oiuiuds3:uudWiurnr
n~n0qlin~wnmrn~nn.r und 6 dumr~ldwnf l i~~b6in~(u*~6~~~~6u~ mnwum o i u I v
a otuoyomsinniinuo.rg~nsaiaaz.aoni~~?iA~~~um~n~not 9 13uBtnqvgninuun'u del a
iiuu11n0s NARMA

i l ~ ~ l u ~ a s ' P I ( ~ e w a 1 Network) I ~ ~ ~ Q I L ~ U O L ~ U R ~ ~ L L ~ ~ I ~ ~ 1943 ~ R U Warren
McCulloch 11AZ Walter Pitts [ I ] ~ A U ~ ~ ~ ~ ~ U ~ ~ Q ~ M ~ ~ ~ ~ Q ~ ~ ~ J ~ ~ I U L ~ ~ ~ ~ ~ ~ ~ W PI3 3flfllflPIi
~mznquljmriiiuaru n ~ i ~ i i u c i u G a ~ ~ ~ ~ ~ p 1 ~ 9 ~ s n ~ w s a I ~ a 6 (Threshold logic) iSui iuqiu6i i
ii?rouli;udwri?dtlaifl~9~~~81~u"4~~1~~~ tmziiiiinrinpnfiiwum~~n.jd
Donald ebb 121 l~GadnG~.r4onnwn41u~o"u i i rn~l iuufuo~nuo~mui~n~Z'~ iu
~ # # a u ~ d n u ~ u o t m s d ~ z n ~ u ~ ~ n d d s ~ f l ~ ~ ~ ( u ' ~ # a u n ' u ~ ~ u ~ n ~ ~ ~ u ~ # ~ f l u o n p n ~ s ~ u u f
u o a ~ a ~ u ' (Hebb's rule) ddi16iiuaiu~??'nd McCulloch L L ~ Z Pitts lknuolri muisoliuuf
ilqrniiuqll
Frank Rosenblatt [3] l#w'ffl u I L L Y Y 61A04 ~ 6 9 Warren McCulloch LLnZ Walter Pitts
rnuifndiudidnljn~:nii~ni~liuuf i1uciu&n~~~u6~a?~uoildiu1dof1011~1~1sou Y
(Perccphon) ~ M I L ? J ~ J L ~ U U ~ ~ U U ~ ~ ~ I S % I (Supervised L,eaming)
1960 Bernard Widrow LLAZ Marcian Hoff [4] ~#w'(illul% nlf nl4~fiiPIfllflPIi 9 1 s rhniudiudiilnGninaoqiiu4iuiia?'a l ~ m u i ~ i a d e z d i l n n ~ w ~ r ( n i ~ ~ ~ n ' . j ~ o ~ i d ~ u Y ~ d ~ ~
~ ~ n o ? h ~ i ~ a ~ ~ ~ ~ d f o ' n ~ u l ~ ~ ~ i ~ ~ ~ ~ u f i ~ ~ ~ ~ ~ ~ u ' ~ u d ~ ~ cast Mean Squares) tmr1# rd a
h u i g d n r o l n n u n i ~ ~ ~ i ~ n d (ADALINE) ~ L ~ L ~ ~ ~ I ' I I ' ; U U ~ ~ L U U I H J ~ ? J ~ ~ : ~ ~ ~ ~ I W ~ Q
B i?unii ngmrliuufuoaiT~sa-8~dd (Widrow-Hoff learning rule) ( a ~ k ~ u m f l i u u f u u u i n i f r,
4 0
%Ul
uuu~lnosidoii~msou9uLSu6nu1oo~~"n1n~1usia.jnuasr~1i 5o-so ounx&
nR(r969 Marvin Minsky LlAZ Seymour Papert [5] ~ / i ~ ~ ~ ~ ~ ~ ~ l T i ( m i ~ n q ~ ~ ~ ~ 4 ~ 1 ~ 4 1 ~
d~i~nl~~o~i1li~1~1~nl441~n'pI~~11~16li~~~~?~~d~1# L I A Z L ~ R ~ ~ X L ~ ; U ~ I ~ ~ ' P I I U I S O I ~ ~ i u ~ ~ u d o i ~ l n l ~ ~ r ~ u d u u f ~ ~ n ' ~ ~ XOR bo6auo~~nd1adi~w'~n'~6~~a~~~iun~~~n1rw'~l lu1

r a plA ~:uuds:u?nwanuuIns~iiu~e,~i.aaridr::pnn ika::kuQocainlu4?cnai~qndialuu~n
~ i ~ ~ o ~ f l ~ & h h ~ i ~ ~ ~ p 1 ~ 6 ~ 8 9 ~ ~ 5 9 ~ 1 ~ d 5 : : ~ i ~ k ~ ~ 9 ~ dil6qiurn.r&iuiiuqiuid"aQab$u
dnu~aoiIu?cnnu
Paul Werbos [6] ~ # b f l ~ ~ ~ n f l ~ ~ ~ u b k u u n 5 : : u l u n a l u ~ m ~ n l m 8 ~ ~ n n ' u (Error d plw
Backpropagation Algorithm) 8-rr8u~mAni1uq luauumnmlk-a~d ~~dniG%glu'~ilun~ Y
<uuln ~ ~ f l 5 : w ' ~ ~ f18.1985 David Rumelhart LLttZJarnes MCClelland [7] ~ ~ ~ l b f l ~ 8 ~ ~ f t 8 ? ~ ~
" A 0 m~ns::nunaiutimarn~8ouna"u~nni~ . a t ~ ~ u ~ a n o i l u n i s ~ u u f ~ i m s u ~ ~ a n i s u o ~ p i ~ 48a iimnrnmAikno~uii?u+Yau ~ ~ ~ o ~ a ~ m ~ ~ o ~ ~ ~ d ~ ~ l u n ~ ~ ~ n 4 ~ u ~ i u i d " ~ Q n d f i n ~ I u
4' 4 w 4 cu&~uuu anzl~~i;nl?~iu9~!in'md~nu~n~nuolIImu Minrky kin:: Papert i iu~iuua~n~q
n~uiulnLgudiiuu~nni'4niIq
lunn?n~d 90 iitl~iuid"~inn~uui~~udaruIo~ua~nIi~ ~wsi:airnsn~~ui~iu~iu
l # n 1 ~ ~ ~ ~ i u 1 l ~ n ' ~ ~ : ~ 1 ~ 1 ~ i n a 1 ~ 5 u ~ o u t ~ n : ~ u ' ~ 3 ~ ~ d ~ ~ ~ ~ 6 1 ~ d d ~ ~ ~ ~ ~ 1 ~ finis41
iiu~i~ii?s'pl~dszqn81"~flu~niuq~i~bsiunisd~uf~i~d6bu (pattern recognition) ms
auins&~imn n ~ o n ~ s n ~ ~ u s z u u d ~ n a i u ~ u ~ o u
Nerenda unz ~ w t h ~ [8] l ~ ~ n ~ ~ n i s l # i ~ u ~ i ~ i i a Q n I u n i s n f ~ ~ ~ t ~ u i ~ n o ~ t ~ n z
n?uquszuurnqnni~ni~~q~du ~ ~ u ~ ~ i i u ~ ~ u i d " ~ i n ~ ~ o ~ ~ ~ u ~ r l s ~ ~ ~ n i u k u Iunisnfi
ttuubin~.~szu~~ ~ ~ n z J n i ~ ~ ~ i u # a u ~ n ~ ~ n ~ z a i u n ~ ~ ' ~ t i m ~ n ~ ~ ~ ~ ~ n a ' y wnnisbinoqnis d 1 9 n~uqurzuuni.mnnlu~~~~du~uii1M'wnnis~auqud~
lug 1991 TZUIOXEUU unz ~mah l [9] I #dazqnf i#~ i~~ iuu"a?nn 'u8~~~6~wu~~u
(Invert Pendulum) 66nz!U~6~mn'U$bo4 Greene Lmz Tan [lo] ~ ~ ~ ~ ~ I u ~ I u ~ ~ ~ ~ u ~ I ~ Y
nauqu~uuu&nunnnoq~~%u ~ n o a n i s n ~ n o ~ ~ f l a % n i s n ~ ~ ~ i u ~ a i u ~ ~ w n ~ ~ ~ ~ u n ~ u ~ u
nis3nGiuqiu
~ 0 r d g - m tmz M W ~ I [ill I~~i iu~iun~uquszuu~uiu~dn'u~anauqu~tuu~~ (PD dd 0
Controller) TmuC~i?n~uqua~mmsnauqusz~~~3~ ~ ~ u . t ~ ~ i i ? i n i ~ u t ~ u d s z d n S n ~ ~ ~ o ~ n i s
flauquszuu
~u'J 197 Nerenda LLnL Mukhopadhyay 1121 ! ~ L P I U O ~ ' ~ R ? U ~ U L L Y Y ~ ~ ' I I ~ ~ ! #
(Adaptive control) ~R~~~~iu~1uu"as'nb~¶~u ARMA , NARMA 66nz NARMA-L2 6 ~ ~ I J L f k J l l n'u
B ~ a u u i i n o t m r i ~ ~ i l ~ ~ ~ u u ~ ~ n o t d o ~ ~ * u p i ~ m ~ n ~ ~ ~ u n ~ s ~ s : : u ~ t u p i ~ ~ u o u ~ n ~ diniu

aiiuqiuiia?niiuu ARMA Aivsstaiids sw ian~%fi~miuez~naio~~uw"u~iiuui$~idun'u~iu~~
si?idnfu~ujaeianidr-iiuoJi liauiiu.nuu'a?nnuu NARMA Aiu~.a;a-)1id~ sw iamlfi ARIU ~ z d n a i u ~ u ~ ' u 6 m u l n i i ~ ~ i d u ~ u A 1 u o ~ t a i i d ~ ~ u ~ u ~ a ~ ~ a n 1 ~ c i i u iie.nuiia?nnuu
NARMA-LZ ifioinnilriiiiuu(iao.r NARMA m u s i u / i ? u o y n r u m i n o ~ ~ o u g f i ~ ~ i ~ u f i A ci
m u w s ~ ~ ~ i u i r o k ~ d u i ~ ~ u ~ u f l ~ ~ ~ w ' o ~ ~ u ~ d v o ~ n e , u ~ ~ i ~ s u (Companion form) jlusiofli3
oofluuulM'igumrn?u qui~uu~ounn"uiilM'i~uiD~~du (Feedback linearization control) Wn
mriino~msnauqun~1416ana~1qx1u"aT~iiu~1 NARMA - ~ 2 lM'~nm~nauqufllXn~~u~n'u
Pi?n~uquiiaTrciuu NARMA i ~s in i~ i~n~~ i~s i?~auqul f i~ iun i i d 9 -
Habibiyan Setayashi tin :: Alibieak [ 13ll&diz ~ ~ R ~ u I u ~ I u ~ ~ ? ~ ~ ~ ~ ~ NARMA-L2
+aun'unsmlaG (F- logic) l~n1m~~~urzpiu61~~qi~~~~~a"~ldfl1l0li'1l~T~qq1~~n"~
Iddiu'am~ui b u a : i i i s r n s n I l m l d f l i ~ ~ u ~ z ~ ~ ~ ~ i ~ ~ iinzdtai?nauquiialr NARMA-LZ
r : ~ u n z h i ~ ~ n a u ~ u ~ : ~ u d ~ v e , ~ ~ ~ ~ o ~ w a " ~ l d d ~ uarl~msrniauu~a9siaq~iwta'n~oq
zqqitudoonain~anauqu NARMA-LZ iidnzsi? w n n ~ r ~ ~ n o ~ n ~ . r n a u q u ~ u ~ i ~ W ' ~ n n i r
n ? u q u ~ i u ~ ~ t y i o l 8 ~ ~ 8 ~ ! & ~ d u o r i ~ ~ ~ i i n z u ' ~ ~ n a ~ u ' 5 1 ~ u ~ ~ n ~ u n ~ ~ i ~ ~ ~ ~ ~ t y ~ ~ f u n a u ! & A ' A uu
~le~andru Homes 1141 l4u'iu~1~iia?nlun1~~f1~~anauqu~~u'~d~un~f~lW'~d~~~~
i#u (~ee-itmck lineaimtion) lunirnauqunrzuaum1 (~ocess control) dieoituoi.rdi'ib
do?nlcifrnuzdad~i9urzuud10ji?~i#uq~ lfiu~~dinirn~no.rnirdiuui~uny mnir
nauqunuiiri?~~uquu'afa~~ui~nnauqun~zuaun~r!k;~d~~~~~~
90) d ciuaeu~~ziinir~npIinni~fiunruuu'iu~1uu'as"n imznh.ru'~uc~uu'ain~w"ol~u ni~n-auqurzuu i m z l i i i i u ~ i u ~ a s " n d ~ ~ ~ d d ~ z ~ n d ~ ~ n a u q u r z u u ~ ! o j ~ d u ~ ~ ~ ~ ~ u ~ R U
9 w a i~wiuu~3nn~zriim3~np11~6u'1u41uu'ain NARMA-L2 RIU~ Nerenda L 6 X Mukhqadhyay
[121 IA i l i i ~u~ l~mrn~no~nauqurz~uozJi~anauquu'afr NARMA-12 idnclaonauqu
iiurzuuAiinaiuuRnii~n'u i d o c ~ n a i u r n u i ~ n t u n ~ r ~ d u ~ a n a u ~ u ~ ~ n n (un*er~al
controller) uotdiuciuu'ain rzuu~ozrii/iuciuu"a?n~dnauqu~oiwuc~ir'u rmrrzuu
nauqu.rzciuuoamna Tfiuaznctnouna1umu1cnuo~6a~auqo~ l u r n r i i k n a i u l ~ i d u ~ ~ ~
iduuo.arzuu n a i u ~ ~ u i ~ n l u n ~ ~ ~ ~ l M ' ~ z ~ ~ u i i ~ ~ i i i u ~ ~ ~ w (Stabilization) imznaiumlnrolu
m ~ ~ a u ~ ~ ~ ~ 3 z u ' U R ' f i R i ~ i i u a ~ ~ (Trajectory Following Control)


Neural Network Input Hidden Layer Output Layer
Active 1 fhah 1

3.2 hu~i~iia~~i~uuid~iioyd~ao~~i%liuEod
iiu~iuu'ainuuuidor"Lo11up9sounniudu (Multilayer Percepm) ~ u l i ( i n h ~
dr:nou#?uiiarounniu~a I # ~ ~ ~ ~ ~ Y u ? u ~ ~ L ~ u u ~ L L ~ u ~ ~ I ~ B J I (Supervised learning) ~rn-I4 ~p9on iad16ounu (Backpropagation) diniums$orluiiuqiu buds:nouAiuno~
iautioun"~ m.rri.rdiuldh~nri; (~oward pass) imzrnsri.rdiubunii~ (~ackward pass)
rhniurn~d.rpiiu'ldu'iq~u'i doynrzdiuibi~r~iiuds:aiMi~uoJiuGouni~i im%d.rdiu * A eindn~uunu"~ld~~o~unu.rouns:k~n"~duGo~noon daum~ritiiuluniiudidinu"nnis
dou6o (Weight) o:-llndiu~d~uu~~aom~60~n'ungnisi~~~~"wm~n~m (Error-correction) &fi n " ~ P l ~ P 9 ' 1 ~ ~ ~ 9 ~ n ~ ~ ~ ~ ~ ~ ~ ~ l ~ 9 1 ~ (Actual response) ~ ' ¶ J w P ~ ~ ~ F J Y ~ ~ u ~ ~ L ~ I M ~ I ~ (Target
response) ' l # 8 w q l ~ ~ b i ~ ~ n ~ ~ (Error signal) ~ t ~ ~ ~ i t u i i m n n 1 n ~ : ~ n d ~ 6 o ~ n n " L I i 4 1 ~ la t i idinrinmsnou~~~:~n~iu i
ouns~k~prnp9ounue.riiu~iuiGi1n8wnp9ounuo~idinoJiu
Neural Network Input Hidden Layer Output Layer
Tar* Ouput

3.2.1 I ~ U Y ~ I B ~ ~ ~ ~ ~ B U ~ U ~ ~ ~ Z U ~ [is]
~ ~ Y U ~ I ~ Q P G ? ~ ~ U Z U ~ B ~ L ~ U ~ (Single-Input Neuron) L s U O ~ ~ ~ ~ : ~ ~ Q ~ J & ~ I U U B ~
rjiu.r~uiiain ; I iiarouiin:: i guqm r~nm~qdd3.4 ninmio'uqw p (scalar input) a q n Q a
&:?u nmrniiimh w (Scalar weight) ~~8aQ1~1~~uiiUd1lui~on b (Bias) I#P(OI~U~U~B~(III? Y
n ~1nriua~~nri.r~d1ua~~1~1%1'ifl~1~6~161"~ (Scalar output) li?~~.r6<un1:sju (Activation
function)
Inputs General Neuron n m
n ' i ~ l i n u n : r i i l u ~ i o ~ d u z ~ ~ n u ' ~ d ~ u ~ ~ n i o ~ m ~ u ~ m v ~ ~ ~ ~ ~ ~ ~ n ' ~ u ~ n o i ~ ~ ( G ~
liaseu 1un~~iln<~uc~u~l&fi~adu~~n11~"uido1.1;a~i~l~q~oonu11ndt~u~~utdinului 4 w 4 ~oemruind~m ci?uY~6~unr~~uu:~ntn"~nt~u~~0nt~uu~1u.j1uua aafiiunmilull
d w d m ~.rla6~ut3c~tvuni01u'i~~~du~o~~ai~IIt n 1~u~enaunuaul46uu1n~ol.sn'h i%n3n d w d drl t
U O U ~ (Log-Sigmoid M i o n ) ~ ~ ~ . ~ T R I I U ~ I J ~ ~ . S YwYu~o~-J~uouRI V Z L ~ ~ ~ I Z U ~ ~ U R ~ uanuinqlfli(Gil& 1 n i o o u u ~ n ~ l X i i % ~ % ~ p ~ u n ~ ~ 3.3
1 a=- 1 + e-" (3.3)

3.2.2 I I U U ~ ~ ~ B ~ G ~ ~ B U W ~ ~ ~ ~ S M ~ B I [IS]
T ~ U $ ~ W L I X ~ ii~50u 1 s i?n i~ i~o~~O^~~]m1Xainn i1 I <a ilq~ p, . p, ..., pR LL~O::
ri?arQntiadivGnhwii w,,,, w,, . . . , w,,, 6 6 ~ r n i ~ i r o c m m ~ ~ ~ ~ ~ ~ u ~ d ~ 8 ~ ~ ~ ~ ~ ~ 1 ~ n d ~ u q n
p ( lput Matrix) I 6 n L W c i l ? n ~ ~ l j ; H ~ ~ W(Weight Matrix) ~4~6ffF141~~dd 3.6
Inputs Multiple-Input Neuron n m
1~d3.6 iinounrnuiluqcl [If]
~ 5 ~ ~ i n 5 u ~ n a . ' n ~ ~ a ~ n o ' a ~ l i ' 1 v G f ~ 0 ~ ~ n o i ~ 1 d ~ ~ ~ n ' ~ ~ ~ 1 ~ 1 ~ m ~ ~ m d ~ s i n i ? u i i ~
3aaf%n'l!Ym68ff b b%uq~pi (Net input) n luph~84

u w 2 < 2 l o V l ~ l G m (Neuron output) ~ u I J ~ ~ u u ~ ~ ~ ~ R ~ ~ A A ~ u
a = f (n) = f (Wp + b) (3.6)

Inputs Laycr of S Ncurons n m
1d43.7 4iaiu&i~a-~ [is]

Inputs First Layer Second Layer Third Layer n---
Y A Y t d B a s dauGuouqosGunii+u$ou (Hidden layer) un~aoiia6h%u~~~.tu8uqm p UUIRR 2
1: d ioiiiq6~ 2 uum s aunno~szii5uqmZo iio a'lmziirii~oii-qcr a' uum 9

Input Log-Sigmoid Layer Linear Layer n- -
f2(n) = n
h~u~ri i l~ninri~mof eii.jq6pii6qif
w;,, =lo, w ; ~ = 10, b: = -10, bi = 10, = 1, W& = 10, b2 = 0
I4'Suqm iidioir:nii.r [-221 r:lhnaounuo.rao.riia.r1u~.~~dd3.i0 imod * A w n m o u n u o a ~ : i ~ u ~ ~ ~ i t ~ 4 u ~ ~ ~ ~ ' u a.rSuwnu~ain~.rn"+uns~~uu~~iia~ou~uR~~~n
~m:enu~mdiu~dii~uo.r w ~ ~ ~ Q ~ ~ ~ u ~ Q ~ I u ~ ~ u ~ B ~ ' Q ~ ~ ~ I ~ ~ ~ ~ ~ I w I J I ~ ~ B I ~ ~ ~ I ~ ~ i ~ ~ d d u u ~ i ~ ~ r i ~ i m ~ % ' ~ ~ ~ ~ ~ w ' w n m ~ u ~ ~ o ~ ~ o ~ ~ ~ u . r ~ ~ t d ~ ~ ~ ~ ~ d a . r m ~ u ~ d d . i i $4
6 4 d 1im~wnroumro~ao~i1u~1u~u~unir~da~uri1~1~13~m~fw"n~~a~.rif
-IS<, i l , - 1 ~ 4 ~ 51, ~ i b i i20 , - 1 ~ b ~ ~ l (3.14)

I I
m~Q~u'~w~uu'ainldlflu~~uda:uanPtnBi~~qu'u r:#o~dirn~diud~~n'iJ~nu'n
imzn'~luiionuosiiuq~uLidnziu1~inu~:nui~ufiu t~szdil~~:uunilnanfi~nu'~d~fiu ri?d~:u1mmn'1n1nnl#oi1~~ioju61 ~ m d n u ' ~ u ~ ~ u n n ~ u u (Training Multilayer Networks) d s a scr nuuunoasm~~~uf~~uui~013~1 (Supervised learning) ~ n u s r ~ ~ ~ ~ ~ f i i ~ u o ~ ~ u q n i ~ n ~ n ' ~
idinumdnonnXo.rriu ~ u ~ n d 1 c i u r i ~ n o : ~ ~ o i ~ 1 d u " ~ ~ 1 u ~ 1 ~ ~ d ~ ~ 1 ~ a m i o 1 i q ~ 9 ~ ~ ~ u ' 1 u ~ 1 u
u8a ~1u1i~uuduun'u~o1~prfiid1~u1udno~~1do~n'u~~prnfi1~u1i~ni1~na1~iian~i1~n'~
oii .r l3 ein~uirrfiimnl~uu'iu~~u~doln"~~diio~iprnu'iu~iufi~~udo~ddoonoJiijn'ia~~ m u d 9 4 94 muriiidinlnuu~nd~m ~ ~ ~ ~ 7 d i u i 1 ~ ~ 1 ~ a ~ n ~ ~ u 1 4 n ' u n o a ~ n 1 ~ n ~ : ~ 1 u Q i o u n . i r ' u
4 (Backpropagation) %~0zd~znou~dhun1~$i1ua~n1n'1i~1oJ"~fl~1n'5:uuu'1u~1u fl12li1uaun'1
na-tui i~nm~ mrdiuaudirn~n~: a i u & o u n . i r ' u u o ~ c i i n a ~ ~ ~ i i ~ ~ n ~ ~ L~D:RII Jiu

~ ~ n o ? ~ o ~ ~ l Q 4 n 1 5 6 6 d f l 5 ~ ~ 1 ~ ~ 6 ~ ~ & @ U n a " ~ 1 (Backpropagation algorithm) d l n h Y '4
u ' l u 4 l ~ H n l u ~ ~ ~ ~ % % n i 3 n m r r ~ ~ 1 8 1 l u t i ~ a i n ~ ~ ~ ~ ~ i (Gradient Descent Method) iM~n°l lw'61
a * 9 A m~r~iiwnrauuo~waiui3fi~n1fii1n'a~1'o~uw1~unqm (Least mean square m) IRUQII$
Goqnn~r?Jn (Training Set) ~ ~ d r ~ ~ ~ n 0 ~ ~ ~ U ~ U ~ 9 9 i ~ ~ ~ b ~ l H ~ l U d 9 ~ ~ d ~ ~ P I ~ ~ 9 ~
lnus pq floiu~?n~~uq~uoau'1~41u unr tq R'orn~inko~~~if l inuiu (Target
adput) io1~nroau' iu~iu~~~nGiui i f iuui~u11n"~~oi iy~1~i l iu1u ain~uiriiarriimrd?u
c i 1 ~ i ~ 1 i i t c l o ~ u o a u ' i w i u ~ # m r a u ~ 1 a 1 u ~ ~ ~ n i m ~ i ~ ' ~ a o a ~ ~ i ~ o ~ ~ ~
Q Q F(X) = C e: =C (t, - a,)l
33.2 nimfilaz8~1ni~la~a~na1StlMei [is] 9cl ?sm3n~.rrriu811aniuatn~~~uui (Gradient descent) t ~ u ~ n i s ~ ~ i u i l ~ u n i r d i ~
dirn3iiiuoidiuaiu lmoarn'inird?ud~uuciili'inu"niinz~u~ioalu~"ami~~iinaiu~u r~ d q4qm wiohfl~n"~i jdln~ni lu1ni~m Cinror1~a6h F(* ~~iflufl~naun~~srn~wid1 x d
as ; d rill# F(# uclimnym mlnmw161 r iihlialnmrjiih
d, = -VF(x)
a, dociihsimsdeuf ( M ~ Rate)
d d a s 4 d, R'ot?n~closnunmwdilM'eii FN iiciiaanq .a~vmlk in%rnaa~3r~~1~11u~tu~
y w 2 msti;uuH~uriuwasa~naiu"W~o"(~~imr~~ia'~fio fiiuisnriiu~udi~iv~oLLnzluttofilma4u

n i u 1 . r o n 1 ~ 1 l f i n u ' n ~ ~ ' i l z l ~ ~ ~ o ~ ~ ~ n d s ' ~ k ; a ~ ~ ~ ~ ~ z 6 ~ f i 1 u ~ ~ u a ~ n ~ 1 ~ ~ ~ f l b i ' 6 ~ ~ m In-1 wC; (k + 1) = wr, (k) - as, a, (33 1)
by(k + 1) = b,"'(k) - as,!" (3.32)
f i d ~ ~ ~ 1 u ~ d r n ~ n $ k 8 ~ ~ U d
W m (k + 1) = W m ( k ) - asrn(am-l)T (3.33)
brn(k+l) = brn(k)-asm (3.34)

Finish Training A

ainnaiumuisouot(li1u;11~u"a5'nd~1~1i~oAnd~lM't4u~ad'izu1tllpi1n1nn~~~~ii
n~rr i i ( l i iu~iui ia5 'ou1d~~~n~"$~u~1unau~~ ~noiilmunrruu'iuciu~a5'n~niu~dttuu~l~
lurn3nfi.rttuuBinoaunzoonauusi?nauqu a d t n o ~ i l ~ u n r ~ u t t ) / a z t t u u ~ ~ b o ~ b ~ ~ ~ u Y
irslndiah 8in%~-ntn~wu~~u~#8~ni~~~~1~~1wu'a?n~uni~fia~1qu~zuu!~t?~tdu~# 4 C1 iiwnmsuaoqrzuulBiui~o~n13 a.rmonnoiilmunsvuiiu.ji~CaJnttuu NARMA-u dii
naianiln~olun1~B1no.rrruu'lit5~tdu~ki't~uoti1~~ lu~umouarnuzdinirdszuiol
tiuuB~noar~uuAiud~u~~~~as'nttuu NARMA-LZ a i n ~ u r i i ~ i u ~ i ~ d ~ ~ u i n f i ~ ~ a n a u ~ u
u"J1.l NARMA-L2 L ~ O I ~ U ~ I ~ ( ~ ? U ~ U ~ L Y U 1~~Bi?fl?~q~<?h NARMA-L2 %fl%IaZfl l3
rii~iun&un&riusi?na11~ud~una"udi~~t~ut8~idu (~aaback linearization control)

Dynamics)
cinrmmld (3.35) - (3.38) t~u!8~imnuuuhn8~~~81~11n81s"~e,~szuufliui~nduu
liuslXo~lu~dauuaou'~11iiuu0zniu1~noom~uu6~nauqut8oi1lM'rzuu1it~~td~
nmut8urzuui~~idulRmu9'1u n d m n s z ~ u 8 6 ~ f l i z a z n a ~ ~ % 1 ~ ~ l ~ ~ 1 u i ~ ~ o ' ~ l . n ' o ~ l u ~ d
aouwiliiuu ~ieoiooz~naiu~uG~~a~li~1u1znwi~tuu~1no.~dt~iu6it~u~~o d9wn'Zfla.i
n i u 1 s n o o n ~ u u 6 a n a u ~ u ~ o ~ n d u ~ 1 ~ ~ t ~ u ~ ~ ~ ~ d ~ d ~ d ~ z ~ ~ ~ n i w ~ k i ~unrfid~imuim 914 l s ~1uuuiinoa~~iufi~c~~ti~61IA~~siw1n~n~n1~~q~1t~nztoi~qm~o~rzuu~tan1i1.j~ fi
~ ~ u ~ m ~ f i ~ ~ t u u i ~ n o . j l ~ ~ r ~ ~ t a n ~ ~ i i o ~ d o ~ ~ a u ~ n ~ r n i ~ n ~ ~ ~ f i ~ l ~ ~ ~ n ~ u t a n ~ ( ~ i ~ ~
series) ~~u0i11oto~nruta111dtnu1znu,t8n1~i1n~~rz'~uiiaaiu~~1~o~ttnr~iu~~n1~
li1!d~#flf1.r~anau~ud~wn~'u~~~8~~~~1d~ douuuhno~oqnrul?m NARMA-~2
3.4.1 u~uuiiaaaaynbo~laai NARMA-LZ: [12,17]
6 6 l J ~ iln84 NARMA-L2 w'991~11~1 Oln L t l l ~ $11109 NARMA (Nonlinear Autoregressive B a d
wing AV-) ~~t3ut~uui1a~~1~rzuuua111l~sio~~o~1fi~i1t~16~m~~~~zu~nta~1lfiq
rr~naiu8uriuhtuu~~6~~tdun'u~i~~~b~iFs"qfi 6tnzo'urlauo.r~ruu~u~a~~anid~iuui a
ttuudiao~ NARMA aztumni~~uint~uui~no~lu~d~tuu~tmm mrqn NARMA ~rMl4iimnfi
lunirtmcl~r-uu uriazl4i3u~luddu~5wq~-utnzioi4qa~n'iU:uluni~tt~fi~5ruu
IRA x(k) E R', ~(k) E R liar y(k) E R {Q tiinlfifi 3uqcilttnz~oifim d W dd
f : R" X R + R", h : R" -+ R ttnz f, h E cW ( t j 3 u ~ ~ n ~ n u n a i u ~ ~ u ~ o ~ ) ~ ~ n r
my %I f (0, 0) = 0 unr h(0) = o (~rm~n$pfihvii~) nnrzuufiiurmm5 3.39 luu?taal8nd~.rriupfimqn ~ruuiirzi7u~unaiu~uw"ui
(Relative Degree) Ll'!l~¶J d f l l ~ l % Q ~ 6 ~ f i 9 l ~ ~ ~ 6 ~ ~ ~ 6 t ~ ~ f i 5 4 (Exact R-tion of The
systems) Ilibauttuuiiaoa NARMA RIUflUfrIT 3.40 ( ~ I U I ~ O ~ ~ W ~ I U ~ Z L ~ U ~ ~ L ~ U L ; U I # $
ninpnranaanr~~ntonfli~d~~~~ [121)

thl+iYanauqumwmmr 3.41 fiUt:uu.i~num5 3.49 r:~(~uirnnauqulN'toies'~m 4 w 9
uotszuu~iumiuiXuwitd~otnis~~~iu~o~ni~ iiciwiilunitd~u~nisnfit5anauqum1u
nunis 3.41 Zi?uiiutiuiiaininaiuuin t m r ~ o t ~ + n i s ( i i u a f u ~ ~ u ~ o u +tlinz~anlunir 4 d A* 1 nfithnauqu rtumrriauiauuiinop ~ ~ ~ ~ ~ - ~ ~ n u r u u ~ i u u i s i n m ~ d s r u i f u
a uuuhnoa NARMA #auoY nrutn6tn0~ ~nolXnniuisn Jiuinfita'anauqulN'
y(k + d ) = yr(k + d ) l f l ~ M . 1 ~
rlnnunlr 3.40 $1 F uiuuiu#auoynsurn6tno$ ( ~ a ~ l o r series expansion) 3QuIR
[(y(k), y(k - 1 ) ,..., y(k - n + I), u(k) = 0, u(k -l),u(k - 2) ,..., u(k - n + I)] 9 r I # ttuuqinot NARMA-LZ . IU~OIS 3.42 ( m u ~ s n i l n ~ i s i u n r t ~ u ~ t ~ u t ~ u ~ ~ d ~ ~ n w u a n t ~ n z
~ininnni~81454 [121)

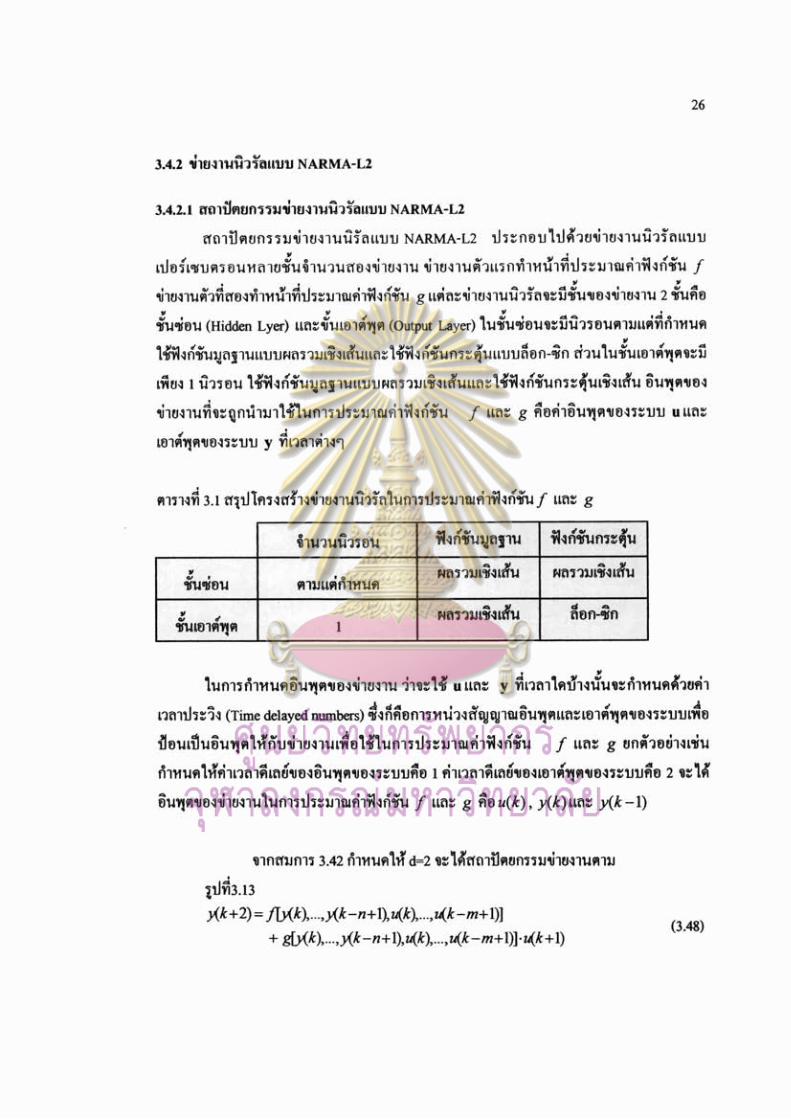
aiou (Hidden Lyer) ~mr&boiiqos (output Layer) 1uiuiouarij~?roumiuit9idfiinufi
lunir dinu~o'uymvo~(riiu4iu 41ur14 u lm: y AlamlfifiiPduirrrfiinufi6aupii 4 dki A
1?nld5:?4 (Time delayed numbers) r 4 n ~ ~ f l l ~ ~ i a 4 R * ( Y ~ l ~ o ' u ~ ~ L ~ ~ ~ ~ ~ 1 i ~ ~ ~ ~ 4 3 ~ ~ ~ ~ ~ ~
d o u d u o ' u q m l X n ' u i ~ u a ~ ~ ~ w " ~ 1 3 ~ n ~ ~ d ~ ~ ~ i ~ d i ~ ~ n " ~ u f un: g ansi?odittdu
~inufil~icanilm~u~~Buqmu~~r:uufio 1 ~ i i a r n ' R m h o a ~ e 1 ~ ~ ~ 9 u ~ ~ ~ r u u ~ ~ 2 trl6
~ u y c l u o a G ~ w ~ u l u m r d s r ~ ~ ~ ~ ~ Y ~ n ' ~ f 66nr g ~ ( k ) , y(k) 6ln:: y(k -1)

Ncural Nctwork Approximation of g()
Neural Network Approximation of $0

A (Structure Model) d ~ Y o a m l n ~ v u ~ u w v n ~ ' l a ~ . ~ ~ R I ~ I J ~ I # I ~ ~ ~ R J I ~ ~ : : I I I I ~ ~ J I Y hm.i
thnu~hu?uu"arouuo:iiu?unrnAmulR' u n s i ? o r i ~ ~ ~ d u m u ~ a ' ~ ~ ~ ~ ~ ~ ~ w n w " u d ~ ~ ~ ~ ~ i ~ n o ~
n G ~ r n a s l ~ m i u ~ ~ ~ n i ~ 3.49
y = au - by - csin(y) (3.49)
L L ~ R J P N A I ~ 3.49 I $ Q ~ I ~ ~ : : U U L ? ~ I I O ~ ~ Q L U " Q ~ (Discrete time) %ilL?nld~ (Sampling
time) L i l n ' n r T o::l#Hunlr 3.50
y(k +2)=(2-bT) y(k + l ) - ( 1 - b T ) y ( k )
- cT2 sin ( y ( k ) ) + aT2u(k)
sinrmmr 3.53 srtiulffji ~ ( k + 1) du~an'huss y(k) nn:: y(k - 1) arizarifu
nin41uauomlmci*oa o unr y lXt8u 2 tm::~ sliuriiciu r::l#5uqmaa~ Jiaciut91wr'v
11~:lnmn'iRan'h fun:: g n'o y(k) un:: y(k -1) ~nann&arillrrnni~ 3.50 daulunir Y Y
fi1wum4iuauiia~ouluh(nioulX~~0~1::mcs'~nird~::0~imn'1v~au'i~ai~u'u niuimnmooa d u d I~~i'nnniQnu'io~iu kunisfiiwuniia~oud~~~~ncs'i~n'u 1~~a~R'onI44iuauiia~~unu~mq~
~ ~ I I X ~ ' I ~ ~ ~ ~ I R ~ U ~ I S A ~ ~ ' I U ~ I U ~ ~ ~ I Q ~ I U V Q I I L % ~ ~ ~ Q U ~ ' I I I ~ ~ ' 1crri::ni~on41uau~arsu
duin~&ldo1ra: : lu 'hulXd~~~n3ni~1~n1rd~: :u1mn' iu~~Ji~~1~~n'1~~1 lnrirrji~lX 4 W d A' d
u'iu~iuuasnu~aiu&4~uuin~u r ~ n : : B 1 ~ 8 u # ~ ~ l ~ s ' w u 1 n ~ l ~ n i ~ G i u a m ~ 1 n ~ ~ ~ 1 m $amas

Neural Network Approximation of g() f \
Neural Network Approximation off()
Edi3. 14 ~ ? ~ ~ R ? v ~ Y . J ~ ? ~ J NARMA-L2 [16]

I I
Plant T
L -
I'
3.4.23 niafiiw~m'hr(a~a4az'~~1Ym
lummauqu~ruuli?u~anauqu<als NARMA-LZ ri?nauqutrjiim~~~fiadqqifu
i d o f i ~ b n ~ i u ~ ~ ~ u i ~ ~ ~ d u i i n r w n a ' ~ ~ o ~ ~ z u u ri i lX~ruuil~o~lu~drnni~i'~~ntu'~~ (Micit Ycr 1 4
Algebraic Model) BIluffunl3 3.46 rh~ir'fflusnfil~uRioies'~99V043zu~ ~wun la r~ lu~qq ia
& a t 4 w4o~fiann5~voa-rruulX~d1~11ud~0~n1~ Lu%nis~fianni~ro~~ru~niur0nji1
1ki'Xau%nirfiinu~twnu0a~zuuil~
T Reference
Model .

i ~ n i s ~ r l n s n i d n i ~ ~ o ~ n i s 3.56 Q:!&
Y (s) = R(s)
~fid ~~R"o8qqirndito'a (reference signal)
riwutlums 3.55 lutlnrms 3.54 k
Y ( s ) = - s2 +As
(Yr ('1 - ' ( ~ 1 )
Y (s) = k
?+iks+k K(s>
01n~um3 3.57 Q Z ~ ~ U ~ I ~ ~ U ~ T U I ) ~ I ~ ~ ~ ~ ~ I U L ~ ~ ~ ~ U ~ I ~ L ~ ~ L ~ U ~ ~ ~ ~ ~ U Q (s-d
order System) ~ ~ n ~ ~ l 1 ~ 1 3 n 6 1 ~ ~ ~ ~ ~ n ~ ~ s ~ z u u ~ m ~ n 1 3 ~ d o n n ' l k unz A

nonunis 3.56 uuuu 0 1 a ~ a ~ ~ u u j l ~ o ~ ~ ~ ~ d ~ ~ ~ ~ ~ ~ i l ~ 6 1 ~ s i z d i A i ~ u m ~ W ' f,
dih f umr g, dih g si?n?uqu~~~iuisn~ia'mwa~81%645zuu!~~ri14fluu~& udlums
l4.nuoitsi?n~uclu~~o!iniuisnn~~~8fllw~anauQu~w"oii~knnin~~~szuu~~~ti79
nuuJai ~~d~~mlnlr jmu1sn. i i1n1snau~ulX~o1A~~1~~~szuu~~~1iud~~ia~i t5t I8~11u
h4rn.1 ~ u n ~ ~ ~ n i r i i i ~ u ~ b n u ~ t ~ ~ ~ ~ ~ ~ ~ ~ ~ a d ~ n " h f i ~ t l ~ ~ ~ m ~ u ~ u n i s 3.58 o-dlurlilW' ' 2 sruuiladn?iuntnu~w"uuu (~obustness) ~ ~ s ~ z ~ ~ u n i s A ~ ~ u a ~ n i ~ ~ l v i l ~ n " u s z u u lau
rrni~lni$fiinu~sz#o~d5n5wn~~~owna"muriivo~sruud~nt~na"~~~ urrrniaisnm
rtaflloni~ounriuaotszuu~m (Inverse Dynamics System) 6~~n l~qq l lB l~ lQ~41~681~~~9
-1.4 r v ~ ~ s r u u ~ m m i u ~ ~ u ~ a ~ w m o ~ n i s ~ ~ uoncin6~4i~~ioloud1flunisfiivum1wnv8aszuv
~ a & 4 ~ u j i i m s a ~ ~ a a ~ ~ ~ 1 ~ 8 i t 5 t ~ ~ G 1 ~ 8 a n a u ~ u u " a I s udoriinun18dqqlifu~it6~t~u d w ,Y 4 Atnauuu nnoi?roah (Steady state) W A I Q ~ ~ U O ~ U Q ~ ~ ~ ~ ~ Q ~ S ~ ~ % ; ~ ~ ~ B ~ ~ ~ W U ~ %~iawi!#
oiuuniscio~dd
rrvu61oumr 3.61 - 3.62 lununis 3.55 oz16 y(k + d ) = e,r(k + d ) +e,
fiinud8 e, IKIZ e, r~uciiaai c~dajiini~a~dniunis 3.63
Y (s ) = e, R(s)+e,
rimwerums 3.58 nsluaunis 3.64
Y (s) = Yr (s) + s2 +As
s2+h+keB s 2 + h + b , =f

Yr Yr (s) = - (3.68) S
e, = lim $


w v
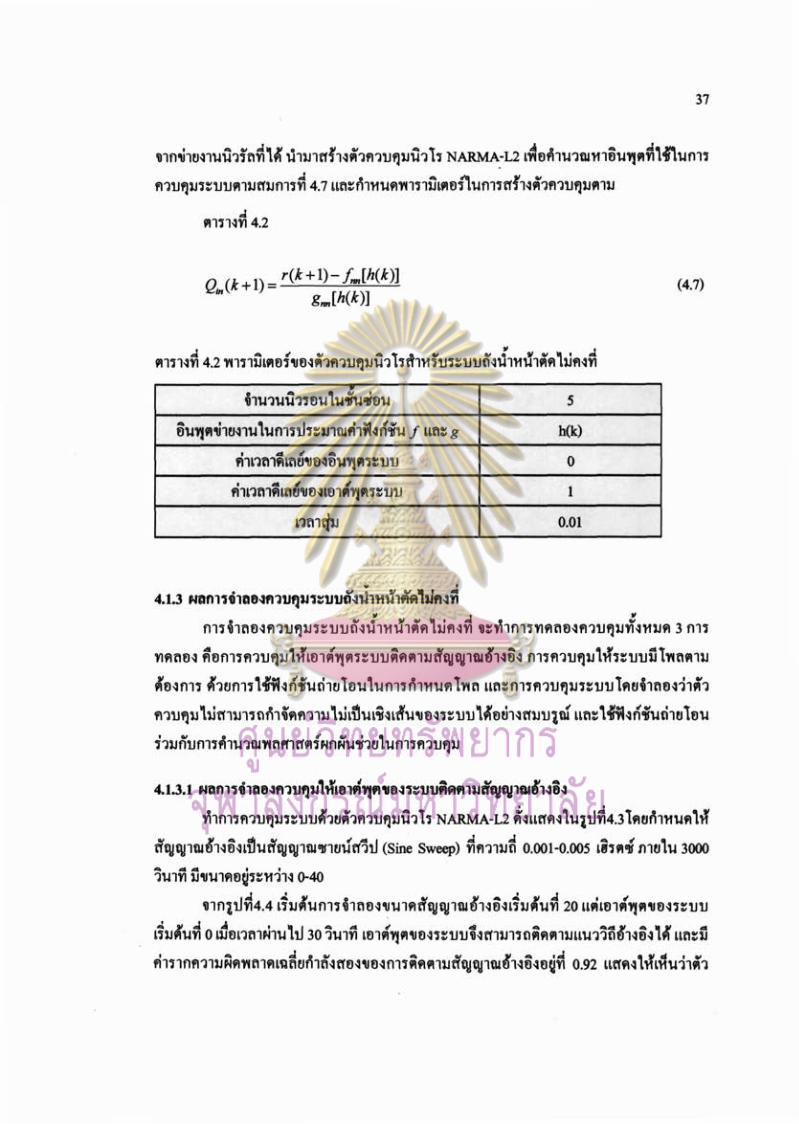
4.1.2 Xanaq~5aTg NARMA-U (hnA~m~~fiJiwM'#m!u'n~~
nnnsnird 4.5 6 1 n u f i ~ ~ ~ u ~ ~ h u a i u ~ u n 1 ~ d ~ z u i ( u ~ 1 ~ ~ ~ h f lmr: g n'o
I%fiGoy nlurnAn$iuaiu ioo,ooo 4 i ? ~ a n i ~ l u n n ~ A Y Goy nin'in'u 0.01 iuiq hnnfitlu
p~d4.2 ~ m z ~ 1 n ~ ~ i i a i o ~ u o a ~ ~ i ~ ~ d 6 1 u a ~ d 1 a ~ I ~ Q ~ ~ ~ ~ I U ? U ~ ' ? J Q U ~ ~ I I ~ ~ ~ ~ H U I ~ O I U

Squared Error)
(fl) 8uqmuo4sz¶Ju
c i ~ . i ~an1~d1ae~ayu!w'~eleiqmre~~:~~amm~u#qq1~~d1~34
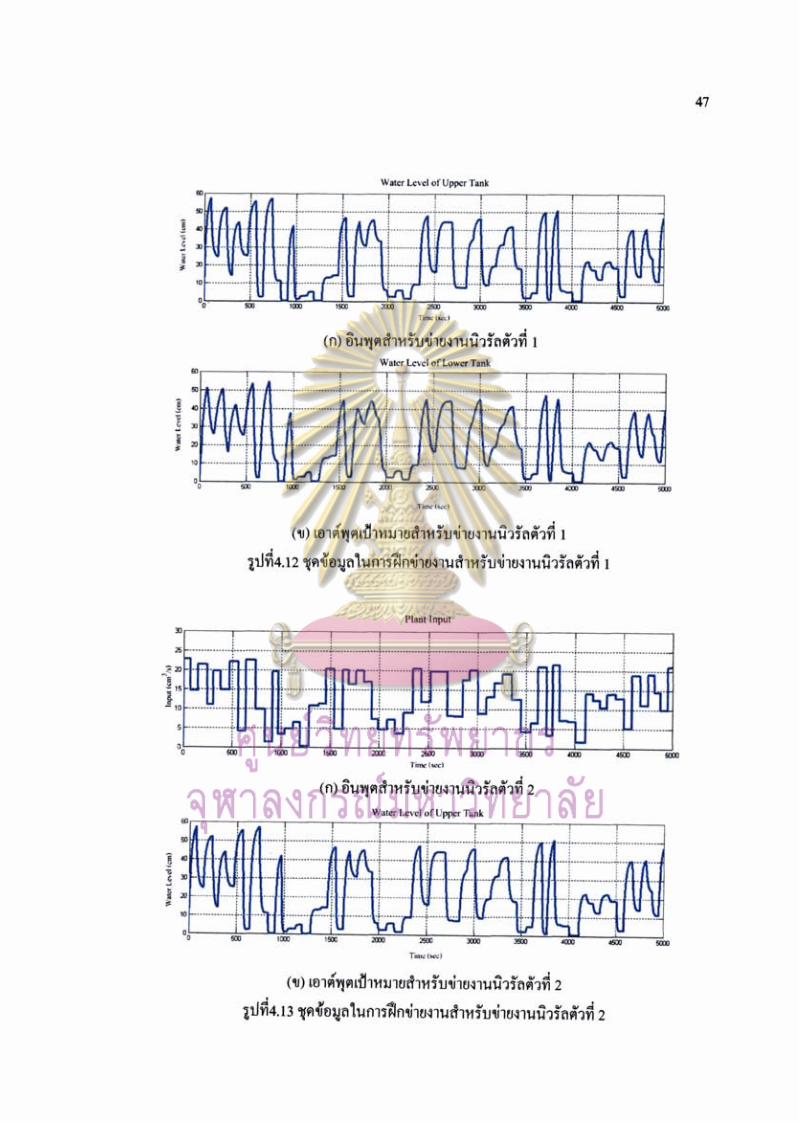
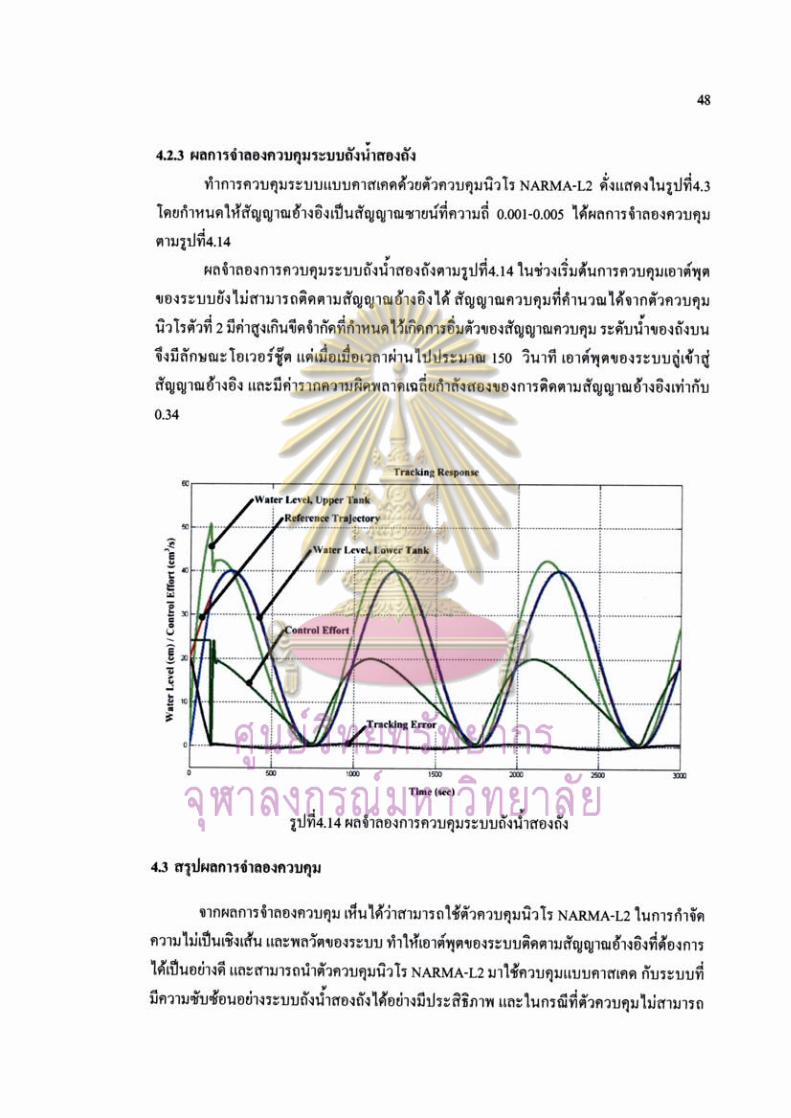
Jiinirnauqu~:uuhu~ana~quiial.r NARMA-~2 i 4 n n m ~ 1 ~ ~ ~ d 4 . 3 1 n ~ f i 1 ~ ~ m 1 ~
ifcyqioldia~t~5u#qqif~o11111u'~"ad (sim swkp) dnaiuzf 0.001-0.005 ~iirfia' niulu 3000 9 P a auin uuuimoti~znii4 0-40
~ in~dd4 .4 ~ ~ x u ~ I ~ ~ I ~ Q J ~ u I ~ K ~ ~ I ~ u ~ I . ~ ~ ~ L ~ ~ ~ u ~ 20 n.'loi6qfiro.rrzuu
I:ufiui+i o ido~arniiiuId 30 i u i ~ toi~fiuo~rzuu~~11iu1~0~mfiiu11ua~ii81~~41k; ~tnr i j
Piiainnaiu~~nnifim~ufi1d~n0~u0~nit~fifi~udqq1fu~1~8~o~d 0.92 tm11Xtiuiih



A PI
4.1.33 ~ m i ~ d ~ a o ~ n a ~ q ~ 1 ~ o ( r l a ~ 1 a ~ 1 q u g n ~ ~ d ~ ~ ~ ~ 1 i i ~ i ~ l ~ d n i ~ f i i s " ~ ~ a ' j . ~ 1
fiimrbinowtauqur:uu Tnufiinufilfl.l?nauquu"aIr NARMA-LZ Bd3:ilniniw
luni.iriiknnimnfins bi?umru8ti'iirj;n~nluIu~oi~~fivo~u'iu~iuu"as"n fhblurnrdr:uiol
diilq6+u g!#i~ e, im: e, miunumr 3.61-3.62 d61d3:lnolO.Z lm: 0.8 flludl~u im:
fiinufi1X8qqicud1~5~iSu0111uu"~d miuoir6inotnauquh?bD 4.1.3.1 W~nmrOino~
~ 1 U ~ ~ f l l ~ ~ d d 4 . 7
P c n ~ ~ n o . r n a u q u ~ X i o i c i ~ ~ r ~ u u ~ f i ~ ~ u i ~ u a i ~ b ~ a ~ c i d ~ i a n a u q u ~ n r i i ~ ~ ~
dr:Bnirnwlumrfiikwnimnfinq m1u~dd4.7 ~ : i ~ u I C ; j i ~ o i ~ ~ ~ o ~ r : u u ~ i n i u i ~ n
~ ~ R A I o J ~ Y ~ ~ I ~ u ~ I P ~ ~ ~ X Q ~ ~ I ~ I # d n ' i n n n a i u i i f i w r n f i i ~ d u f i i n ' ~ ~ ~ ~ ~ ~ ~ . ~ 7.35 idocsinri?
n a u q u ~ i ~ i l n r n f i i ~ f i n a i ~ ~ ~ n i i ~ u ~ ~ ~ i ~ u ~ m : w n i ~ u o c r : u u ~ ~ o t i i q n u u ~ ~ ~unri id
rnuirndiud~.rdr:iS~~niwluni~~auqu #aumrl#Ganau~uu'atr NARMA-LZ i a u h
Cls6htiiulou im:dimriiiuacuwnnnms"Bounn"U~w"ona1u~ulXr:uun1u1~n.P~~91u~iua sad ann#osm.i'l#i' ~fiu~wnd~~~ufil~iiur:u~~~n~on~rA~wufi~na"m~~ui~;~~dl#n'ur:u'~

R(s) = , kp (pr ( s ) - Y ( s ) ) s + kvs
(s2 + kvs + k p ) f (s) = Yr
kP
(s2 + k , , ~ + kp)E(s) = 0 (4.10)
E(s) = Y ( s ) - Y, ( s ) (4.1 1) sd d sr AinumIw' k p , kv m'iriu 0.25 un:: 0.7 mu 81th 1 ~ ~ ~ l 6 r r u a ~ o n f i o ~ n i ~ t 6 i o i i ~ f i

Yr Yr
INVERSE DYNAMICS

n-I.inmno4nauqu3zuuo'aI-Ino40'4 G U ~ A ~ ~ ~ : ~ B - I ~ ~ . U ~ ~ ~ : U P I R O d?u-ItuiLdlnn
1~16auu lmz3:ciudlun'44iPR-Iud-I6'u luma41no.mauqua:l4~anauquu'al.i NARMA-
LZ ~oqiia nauquIuiin~~lzmnrn (Cascade control) ~mur:i - Iao~m~nauqulX~~-I iy~vo~
~ : u u ~ m R i u ~ ~ ~ i f w 8 1 ~ 5 ~ $ $ ~ o ~ n - I ~

h , 8o naiuU~uoc~zciu~in'4~u~~mn'~riun'4
h , iio fiaiua4uoarz<u~i84di4flmn'iJ8un'4 d d ~ ( 4 ) ~ o m u n n f i ~ ~ u o t t k u u t9uW4dhuaanaiuq4yz&u6i
a d d 9 ~(~)nowunnui~~uo~n' . jd i4 t~uWsn"huosnaiu~4Tz6'udi
Q h ~ l l i P l i i f f 1 H n t ~ i ~ 8 4 Y U
Q2 ~ o d ? u w ~ i ~ ~ n n ~ ~ i ~ n ' ~ d i ~

4.2.2 n'mauqa~aah NARMA-L2 chnk~suu#di(rsd4 w CLW rzu64dinoaaaunnYwziguiiuu Underactuated man !si?nid~dnauqal#~w'~~.~iYa
tffaan'olliuiwdidlnni~idd.juu u.'ili?~id~dbiosn~'~fiau~uno.jfaiid'~ iio3zciuduoa84
~u6mzkn'i.r hnauqviiahuuu NARAMA-L2 d~8n66~~1~ffi~lf( l14~911~~16;6663 ~ ' U U
nu"u~urlm-nd460iivifl (Single Input Single Outplt) ~ubul4iYafiauquu'al~ NARMA-L2 Y
no4hauquiiuufiim (CW cmt1-01) f ~ ~ s i ? ~ ~ ~ ( j ~ ~ ~ 6 l f ~ l : d 1 ~ 3 # 1 ~ ~ ~ ~ 1 3 ~ ( i Y d 1 Y
uo~t~1~udmuizrm d a z ~ i ~ ~ ~ ~ h d i u o u & ~ ~ ~ ! w ~ m o u n ~ o u m ~ u ~ ~ ~ n ~ fzhIfiaou8.r
uud6ai?(lauqufa~t~n~iuao11ki' a z O n d ~ ~ d Q u ~ q W i ~ 8 i ~ ~ u i ~ ~ ~ i Y a f i a u q a ~ a d ~ ~ ~ ~ w " ~ J i ~ d 4 m~liiuaorn13uqnu~u~zuu ~u~mo~u1~d1dlnn~~i1~n '~u~d~zJi1 l~~~~ud1u~u6ud1u
B da 4 A Y . aumo~~i~muo~~zuui~u ldm1~Kqq1~81u~~~~9a~1auq~iYa~~~ndu~ mrnauqu~zuuciJ
riinoa~4li?uii?nauquiia1~ NARMA-~2 ~u~wu~lmirnau~u~iu~~d4.i 1
nnmnnd 4.15 m u ~ ~ n i l ~ ~ a w ~ ~ ~ u ~ m d ~ ~ ~ n ~ ~ n a ~ ~ u ~ ~ u ~ ~ ~ a r m n ~ ~ d 4.18 -4.19 ~inz
~inunni~iiiaoilurn~tlfiufanauqu~~u

WATER LEVEL, LOWER TANK
WATER L B W UPPER TANK
d,
Water Level of Lower Tank
Plant Input
Water Level of Upper Tank


5.1.1 dnrdLblunirw~a0.r d a v *
1) nouQa~no'~lun~(~~ P i M 1.7 GHz, 1 GB RAM ~ i l ~ u ' l d l ~ ~ Host PC
oon~tuutmznf1~~ap1auquU'iu~iu NARMA-~2
2) nou$alnoi(/auynfin ~ e m i ~ RO 166 MHG 96 MB RAM VIIHITI'~~(~~IU
Target PC ~auqu~~~~~~uKqq~m~inr:uuu~d~:uanwn~~dgg~(~nauqu
3zuu
3) trwasur ~dvmtecth PCL-726 IG~in~iiunsztr~uuim 4-20 Gnsuauil tda
nauquaiao'nauqu i)naimzdm 12 u'n
4) LtwqaqQr Advaneah P C L - 8 1 2 ~ ~ 14diniuiubounrzciu& t a 8 w q l ~ m d i u
l#iuuim e 5 lann" naiun:ttium 12 fin
5 ) niatao~hwmu Ihaug'iiuuwqaqsr Advantecth PCL-726 I u m ~ d i u n ~ z l ~
uuim 4-20 Gna"usu3
6) 1dlltnru Matlam (xPC) ~ $ l ~ ~ ~ d ~ t ~ n r u n n i ~ ~ w " ~ ~ a d o n ' u g d n f dd14~ ltnz
dinGiilfIuCanauqu

a, 7) 1[mnmno.maurlurz6uti'ilu5qnsqns:'uonwunuimm1ninq$ dgdnsdniin
nl.sznoulnl&au
iiqn.ran3zuonn~i~"mIninqd~q 60 iautiums A
m~o.rqui ' i 0.4 i tnqfi i 0.6 ffnuidium3/ia~u~
m$0~6mnu 8 u i f 24.5 5m.1 ~ i ~ n u ~ n ~ i u n u i ~ o l ~ u n i ~ i ~ f i ~ m a ~ a d
Valtek a i a d n a ~ ~ u m s ~ n n u i ?un*qlqi~ 4-20 ijniiiioud
muimsifinaiuciu ~ q q i o l d i ~ ~ ~ ; i i u ~ i m o ~ s : ~ ~ i ~ 0-5 ian6
5.1.2 .iruun~lrrlunifiurnawmam a, 9 w a W a
msnmoo~nauqu3z6uti'i1u<qwsqns:uonwuwuimm1xinqn o.rnlaunisnclno.ri X v w
na1uq.r 60 L~URPIURI dna1uq.r 0-2s iauiiwmr iiuuimrrunwu~mfi 125 RIJIJ~IURP~URI i X a 9 , na1uq.r 25-soiau.'lums ijuuimnunnuimm 75 mim4tauR'ium.r ~n-diugs 50-60 m i n t
X A iau.'iumr ~uuimaunndih 125 mis~~tau&.~m~ n l 7 ~ i ~ t i ' 1 ~ 1 ~ n o ~ n ~ i n < ~ i ~ u ~ ~ n " ~ ~ 1 o i
i$qi#uriunaiugquoqszguli'i r i a u ~ ~ u i ~ & i I n n t h n ' ~ n i u ~ s n n a u ~ u ~ a ~ n ~ ~ ~ ~ n u f i n ~ ~
iilmilmuoqaiad ~qq1~C/~~un1mauqu~:duuifis:~~19 4-20 Sniiiloud riaurz~una~u
~tuo. i~ i l#u i~s imnaio~~u!uni~a ' f i lqqimginlbi i iuu~f io~szwi i9 0-5 Ian6 rtqqim
naiut iu~im~&sz~ndt~du'~ in$o~ Target PC ido~1~~6 iua~ lmsr 'qq i~~~z!~nau~ua ian" d
d~i~uL3zuumiu~Jn5.i

Plant Input
Timc (see)
Plant Output


Tracking Response
5.1.3.2 H A ~ ~ ~ ~ ~ u ( J U ~ ~ ~ I U U ~ ~ ~ W P ~ ~ I P ~ ~ Q ~ ~ ~ J
n m n o ~ n a u q u i ~ o l X ~ z u u ~ m d l w n ~ ~ ~ i o ~ n ~ ~ d i ~ ~ u ~ ~ n ~ ~ n a u ~ u m ~ u ~ n l ~ . lm::
Kinumlwnuo.rrzuu3mfi1u ~ i m A 5.2 i i n ~ ~ ~ ~ q q i ~ b l ~ ~ ~ ~ i ~ u n ' q q ~ m ~ u v u i m 40 W ~ J U
wnmrnmno.rluiaciu&uub9n1rnauqu r-,uuiidaanmJr:i~ ( Time Delay) J / I ~ ~ Y P I ~ A ~ o u n u o ~ u o ~ r : : u ~ n n ~ ~ ~ n ~ o u ~ n ~ ~ ~ ~ e ~ a m o u n ~ o ~ d i ~ n u m ~ ~ e s i r e Response) nofiunar


msmclno~n~uqusz~uli' i~mu~fi~91qifu~i~~~~~uir'~91iaFud~vuicli~duu~t~n~
I~RIUI?~I L L ~ ~ ~ ~ I ~ U R I W P U O ~ J Y U ~ ~ ~ ~ ~ (-1, -0.01) nu~i~~nauquGaTsiaun"UY~n'3~ci1u
~oudIflurnsfiinunTwn ~iui3on?uqus:riuli'i1fioiIu~aLflinuiu (set Point) dXo4ni314 4 1 9 d d u m w c l n m m ~ m u m n m u z o ~ ~ ~ ~ ~ ~ ~ e i n z ~ ~ ~ ~ ~ ~ ~ u ~ u ~ ~ ~ u ~ s ~ ~ i f u 0.7%

5.2.1 d n d ~ ~ u r n l n m n s t d c p l c p l
1) fl0u(i?lll0~Iufl4n Pentium M 1.7 GHz, 1 GB RAM f i l ~ f i l d l ~ ~ Host PC
~ ~ n l ~ u 6 l ~ ~ ~ # l ~ ~ a ~ a ~ p l ~ u ' 1 ~ 9 1 ~ NARMA-L2
2) ~ ~ ~ ( i a ~ n o i ~ a u y n n n P ~ W RO 166 MHS 96 MB RAM fii~Gidlflu a
Target PC nauqulmz?u8qq1f~uin3zuun~dluld3zmw0~l8qql~
aauqulzuu 9 9
3) I IW~JPUS Advantecth PCL-726 ~$8in?udiun~rl~nuu-m 4-20 unnl~oud d o nauquaia6nauqa ihaiunzliium 12 Y'n
4) lbwq?qOI Advantecth PCL-812PG l#dins~~?ubB~n3zciU6 ~ f i ~ ( t b d ~ i f U d i ~
l8i3uuim 0-5 land naiunzdum 12 Cn
5) niataoihrmiu l4nau~riunnsa~u~ ~ ~ e c t h EL-726 lum3iiumz~m
VUIR 4-20 kSLl011d
6) ldllmru Matlam (xPC) 1 ~ ~ ~ u ~ d s ~ l n ~ u n n i ~ ~ d o ~ m 0 9 ' o n ' ~ 1 q d n ~ d ~ i lm::
dmGldlJusi?n?uplu d 4 u w w
7) IImnRnoqnauqusz~ii~uCqnsqn3zuonwunuinm~inqd iiqdn~cunnn
dsznouldki'au
Cqn.rqn3zuonnGigmn~dq.j 60 lauii~un3 2
@Mlf84q¶Jdl 0.4 l l308 l 0.6 O ~ ~ 1 d k ~ ~ 3 / $ ~ ~ ~ ~
@6nfo~&au 8 u i i 24.5 ii(ll f i i~ l f iddimu~d~~~uni~~~m~maiad
Valtek aiattnauq~ni~~nnuo~di ?~i/(Uqim 4-20 %6~68ud
.uicl~imnaiuriu i lqqimd-i~lAi juui~o~3zni iq 0-5 land

upper Tank
4-20 ma
Lawer Tank
V

WATER LEVEL, LOWER TANK
WATER LEVEL, UPPER 1

m I I I I I I I
Tim I d


mrnclno~n?uquinu~Cuoz~cln~~nauqu~wu~Cu IauR'?nauquiial3uuu
NARAM-L2 i%!JIIfi~R'?fl?¶Jej¶J PID
5.3.1 dn.rdh4luni.rnmaeJ d # #
1) fmJw'?lR83lu~Ip Pmtium M 1.7 GHz, 1 GB RAM d l ~ f i l f ! ~ ~ ~ Host PC
88~luulm%afl4E?i?n?IIqu~1~41~ NARMA-L2
2) ~ o u ~ ? I R o ~ ~ ? u ¶ , ! R ~ ~ ~ Pmtium Pro 166 h4Hz, 96 MI3 RAM dl~filf!d~ Target PC ~ ? P ~ ~ O J L L ~ S ? U # ~ ~ I ~ ~ ~ S S U P I
3) llH4?4Qr Advantecth PCL-726 ~#dln~uli34~uiUU~lcl 0-10 h i d ~$FIR?u~u
szuu flnaiunzl3ucl 12 Gas
4) aPr4atQr AdlinkPCI-8133 ~ # d l n ~ u ~ 8 ~ ~ l ~ w " i l n " ~ l n E n c o d e r
5) ldlllfl3u Matlam (xPC) ~ ~ ~ ~ u ~ d ~ ~ m ~ e n n i ~ l ~ ~ ~ c l e i o f i ~ ~ d n ~ d e i i ilnz
fiinfiidduiian~uqu
6) lc lWclnD4 ECP 220

(U) 6~1~qflIdln~lu
l ~ d 5 . i 3 ~~oynluni~~nJiu~i~hn9'11~zuu~wu~n"u

- .
Time (see)
sin~tnmrnnno~~dd5.14 ~ U ~ ~ Q U $ U X U ~ I M U ~ I ~ ~ W U Q ~ ' ~ Q ~ I U ~ I L L M ~ ~ 90 o4m
~ q j q j l o l ~ ~ l i n i ~ ~ d ~ ~ ~ d o ostri ~nm.inauquXausi?na'uqu~'a15~1~'u NARAM-~2 i o i t i ~ n
~ o ~ r : u u S ~ ~ 1 ~ 8 q l q l i ~ d 1 ~ ~ ~ I X o i 1 ~ ~ a ~ ~ a n 1 u l ~ a a n 1 1 ~ U I W I R U ~ ~ ~ $ U X U ~ I R ~ U ~ ~ i o 1 . ' ~ ~ r z u u u ' . r 1 ~ ~ 1 u 1 ~ ~ ~ n n 1 u 8 q l q l i o l d 1 ~ ~ ~ d ~ 1 ~ u n ~ ~ 8qql~olnaurluijnirku
9 4
(Chattering) nn~~~ql1olna~~~d$~~~aol1&;iji1~~~n~v~~ifi~ir"qjql1~1 iiidocoi.'yivl.rzuu dL( 4 $ulbidt?'qjqlioldiro'.r 8q(qliolnauqun~.ruuuui~nnn~ ~ m : o ~ l u u o u n n u o ~ i ~ ~ i f i ~
Xqjqjiol dau~nm5nauquXauZaaa'uqu PID i ~u lX i1s i?navqu l~5r l~z iSw~n1~ I~n i~
nauqulnioi~nrzuuS~niu8qjqjiol8i~S.~ i j i i~a iubin~m~1unirS~niu~~

Time (sec)



si?nauquu'alsuuu NARAMA-LZ ~lflu'i~uiu'~ui&wanisnauqu~ziiwe,lo L L ~
cla .A 1~al~l6dr:~n7niwwfiw~filunisnauqus:u F ~ ~ i ~ ~ u s i O ~ n Y N ~ i ~ a ~ ~ u q u s i ~ ~ ~ ~ ~ u p s ' ~ ~ f l c l w pr
1f iu~~d1~wu.r~ot~ '01~u1~~1~~e,Bo~n1rAnsi1u~1ui ia~n lflailnr ndsruitudi~~p~~ 31ao~ 2 4 4 . 4
r:uulflaiu6iuu 61n:n~rriRlui6~na~qu~a~~~fl~i~ir0duu~'b&(6~11ue,~u~nu 6won A m u i r o ~ i u u u u ~ i n o ~ ~ ~ u s z ~ i ~ ~ n ~ s n a ~ ~ ~ u Iwowamsnauquiidszan~niw~du

[I] McCulloch, W. and Pitts, W. 1943. A Logical Calculus of Ideas Immanent in Nervous
Activity, Bulletin of Mathematical Biophysics 5 : 11 5-1 13
[2] Hebb, D. 1949. The organization of behavior. New York : Wiley.
[3] Rosenblatt, F. 1958. The Perceptron: A Probabilistic Model for Information Storage and
Organization in the Brain, Psvchological Review 65 : 386-408
[4] Widrow, B. and Hoff, M. 1960. Adaptive Switching Circuits, 1960 IRE WESCON
Convention Record : 96-1 04
[5] Marvin Minsky and Seymour Papert. 1969. Perceptrons. Cambridge : IvlIT Press
[6] Paul Werbos. 1974. The Roots of Backpropagation. Doctoral's Thesis : Harvard University
[7] David Rumelheart and James McClelland. 1985. Parallel Distributed Processing. Cambridge :
MIT Press
181 Kumpati Narendra and Kannan Parthasarathy. 1990. Identification and Control of Dynamical
Systems Using Neural Networks, IEEE Transactions on Neural Networks 1 : 4-27
[9] Julio Tanomaru and Sigeru Omatu. 1991. Towards Effective Neuromorphic Controllers,
Proceedings of IECON International Conference on Control and Instrumentation : 1395-
1400
[lo] Greene, M. and Tan, E. 1991. Indirect adaptive control of a two-link robot arm using
regularization neural networks, Proceedings of IEEE Industrial Electronics Society : 952-
956.
[I 11 Nordgren, N. E. and Meck, P.H. 1993. An analytical comparison of a neural network and
a model-based adaptive controller, IEEE Transactions on Neural Networks 4 : 685-694
[12] Narendra, K. S. and Mukhopadhyay, s. 1997. Adaptive control using neural networks and
approximate models, IEEE Transactions on Neural Networks 8 : 475-485
[I31 Habibiyan, H.; Setayashi, S. and Alibieak, H. 2004. A Fuzzy-Gain-Scheduled Neural
Controller for Nuclear Steam Generators, Annals of Nuclear Enera 3 1 : 1765-1 78 1
[I41 Alexandru Floares. 2005. Genetic Programming and Neural Networks Feedback
Linearization for Modeling and Controlling Complex Pharmacogenomic Systems,
Proceedings of IEEE World Congress on Computational Intelligence : 75 10-75 17

[15] Martin T. Hagan and Howard Demuth. 1999. Neural Networks for Control, Proceedings
of American Control Conference 3 : 1642- 1656
[16] Howard Demuth and Mark Beale. 2000. Neural Network Toolbox for Use with Matlab,
Matlab User's Guide Version 4 : Mathworks Inc
[I71 Adetona, 0.; Sathananthan, S. and Keel, L. H. 2004. Approximation of the NARMA
Model of Non-Affine Plants, Proceeding of the American Control Conference 6 : 5502-
5507


u d r m$o.r6finu 8 u i i 24.5 6 ~ r d i n u ~ n ( n ~ n u ~ ~ ~ ~ ~ u n ~ ~ ~ ~ f i ~ f i a ~ a d n a ~ ~ q ~ n i ~ ~ ~ n
Y
vFJ.JI!I



I - -- -.- m a * 7 I
~mmnoanauqulwugiiu 15w~mmmno~uocuil EPC ju 220 vmm~nmnot~illn5o
diull~~riiummiu~luutlu"m tmzauuqnouiiuo~~wu~iiu1&i' Encoder l45miirinrituocaug6u slor 0 itnaiunrdun 4000 $nrr"~o5ou Encoder ~ a i n ~ c k a ~ ~ i r m ~ ~ w ~ 9 ~ u ~ 9 9 ~ ~ n " ~ n a i u n ~ l ~ u ~
2500 $ndd056fl
endulum Disk knput Disk Target PC r-!

n.3 iwsas~%%'ndsGqqia
lumrn?uqurzuuh&i%4~~~9?9~s D/A output PCL 726 lumrri.ri iqqiolldnauqu
szuu I&~WVHQT AID PCL 8 1 2 ~ 0 ~ ~ f l l ~ ~ ~ ~ € l ~ ~ ~ l ~ ' l ~ ~ ~ A I P L ~ ~ P I ' I ? . ~ Q ~ PC1 8133 1 ~ 0 1 3
u'Y~€J~lolw"wffQl Encoder
Adventech PCL 726
lLPI919Qf PCL 726 L ~ U L L P I J ? ~ Q ~ D/A l~umrafi~dqq1olnauqurzuuG~a1~1 9 9 nzdua 12 On mrnsodiui iqqiolnaiu$u + l o T?nn'iinziYqqiolnrzim 4-20 umnoud
iiuu current LOOP Sink ~ ~ ~ I ~ ~ ~ ~ ~ u ~ # ~ ~ P I ~ ? J Q s ~ I ~ ~ s ~ L L T I ~ z X ~ ~ d j U ~ i ~ . ~ ? ~ ~ r l X i ~ w i ~ u u ~
u'Twaii 5 l?nn' iinzla' iind-1diuh~unirdiunr:iia TRU FET ~ I U I U L A H ~ ? ~ Q . I J / I ~ ~ ' I ~
n~uqunirhnnuo-ms-~m i i ~ n i w i o l i . r ~ d n.8
I I
PCL 726 Side I I I
External Side
z d i n.8 ~ m r d o u ~ r ~ ? ~ s r PCL 726 i#diun.rzim
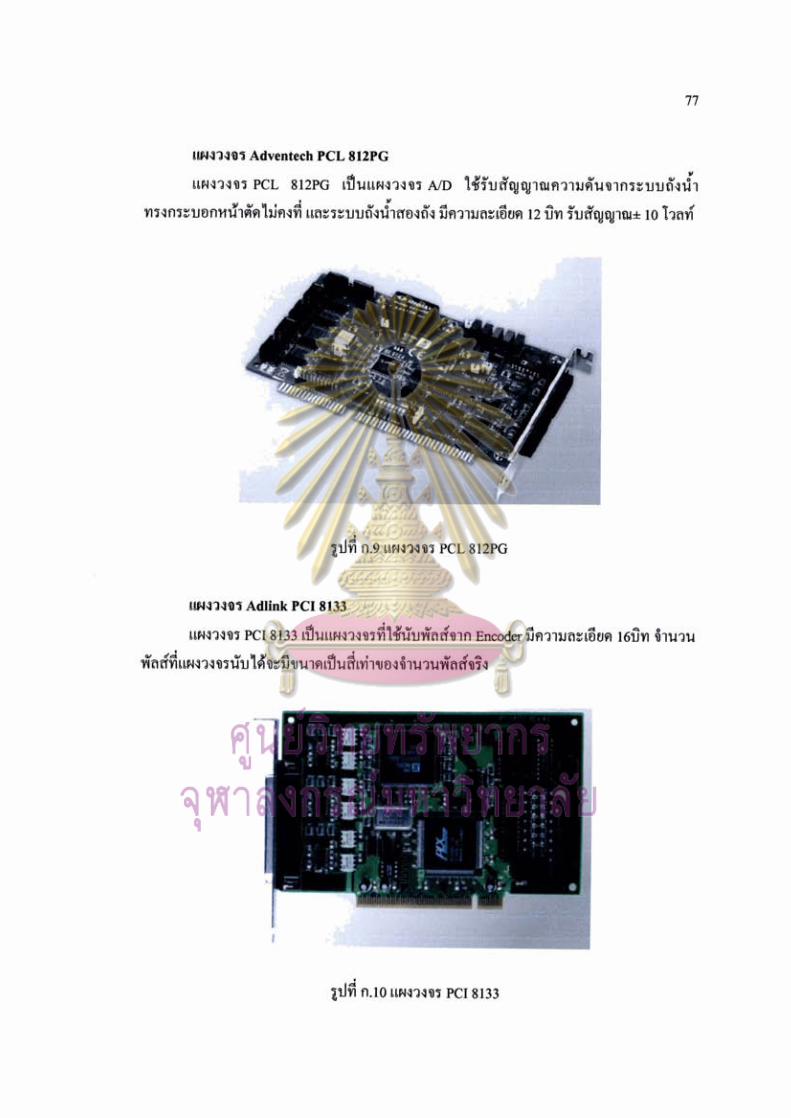
LW93985 Adventech PCL 812PG
uw.ra.rrr PCL 812PG ~Suuwaater A . 1~~ujuikyyianaia~uoin3rupI~qli'l
n3snrruonn&ri~Irind Imrrruuk6noti~q ijnaiunr~Sufi 12 dn iu~qyiol+ 10 land

Fxport Neural Network Plant-Control ... '-

~ ~ l ~ l ~ 6 l ~ ~ f i ~ l ~ l ~ i ~ 9 ~ f d ~ l ~ ~ ~ l ~ ~ l ~ 0 ~ l i f i ~ i 8 ~ ~ l ~ d a ~ d'll.dil1fll4dlVl~fl Y
tffli~Q9un3ao~i1~41~ (Network Architecture) lfiuni~61num41uauUgaaoulu5u~ou n10
uUifiVD4iU$oU (Size of Hidden Layer) 61nufi41uauialndaz~auoa~u~~1 6 ~ : l ~ l ~ ~ f l
azuu daudnoa1fluni~nfi~bo~n~nn~u (Training Data) kudinu~4iuaub~nd~rnfia
hnufiuuifiuoao'uqn-~oiiq~9s~uu ~in~~iiu~~ino~d~z14nfia~fiu'o~nlunia3nu'iuaiu 4 d n7orhiCiq~6ynniadnwl$;01nnisM"inoa03a daudniui8uni~~inu~wi~i~i~9o~voa m~
d w d 3n (Training Parameters) ~nu~lnun~lu?ureu'lwms~n (Training Epochs) irnz~anwnlflu
niianiiuaiu idodin1~3niiuciuint oi~da muirndaoonrii&nrinn imrdiluuonuoa
i1us1ulX
n ~daimarriiaean~pI~'uazpIpIn"aiio1od'i~~7dna~~iazn"a~inoan"a T~.run.ru4inotnau~uszuuCali'inoaCawGiifi1linad ~mzazuuti.lli'inoatYanfia
Olfl¶J~0n~le)9 Simulink i l~z~$¶Jhn NARMA-L2 iw8~3ni~uaiuu9as'niida.iiiniadaoondi
li'ln~n unzdi~unonuoaiiuaiuuid Workspace uoa1drim.i~ Matlab W~iinauOinoa
nauquazuuoi~aolon3ni~nauqul# ~ I Q ~ ~ I ~ ~ ~ ~ ? ~ ~ u I ~ u u ~ ~ ~ ~ ~ ~ ~ ( ~ I U ~ ~ U ~ U ~ I ~
Ainufihniauhri?nauquu"al~ n~o~zrhmr41noanauquTfiul4i~iiGuaianauquu"ala
lfiuuiionhnauquiialanfiaui~~nu~on~oa sirnulid ~ i u ~ d d u.3




w.3 rdsllnapl xPC Target
xPc Target 14u Toolbox ~ O ~ I U I ~ ' I L L R ~ U Matlab ~ ~ ~ ~ u ~ u ~ ~ ~ R ~ u ~ u ~ z ~ P I ' I ~ L ~ ~ ~ t i c 1uni3l=tciu rw: ~arget iut:ii ~arget PC nn: H O S ~ PC dBofi irsrnj icriu#a~~~~~
d 9 .A Y
RS232 njo TCPLIP P~O~OCOI l m ~ l d ~ ~ ~ n ~ u ~ 1 ~ n a u ~ ] u ~ : u ~ 1 ~ n ~ ~ u u l u ~ n ~ o e H O S ~ PC tinGu
t ~ d i r n ~ ~ ~ l l n e l d r ~ ~ n ~ u 6 a u Real-Time Workshop 1fid366~3~dfi~lttln Matlab/Sumulink €Id lulduocnmi c iLliatiniut:~ c/c++- noulwmoi idnwmi c l~tSuliiRCf ~arget PC
~ T - I ~ J I J ~ I ~ ~ I ~ Q ~ # ~mrl~mtrgndcsin Host PC 'ldh Targer PC 62" xPc Target mh~~lumr 9 d w n?uqua:uululanidc uontiniu ~arget &jlinuinaudc~oyn~~niic ~arget PC {u
H O S ~ PC fi1u10ii1nu~w151~~~0in~od16ic~ ivr'onauqur:uupiiw H O S ~ PC Iunrnt~elli .A Lmzluoctin ~arget PC l U ' l # i i ~ i u m ~ l X ~ : ~ ~ 1 d ~ ~ ~ n 1 ~ 5 u l m d dilbiui~oiiinum
m~i?n1lum3~~lX~15c~: ;p1l~ln~5~1i
m.rl=tciu rw: 9 : ~ ~ ~ ~ 1 ~ ~ ~ ~ 1 ~ 3 1 ~ L 9 9 ~ ~ ~ ~ 1 ~ 1 3 ~ 0 f i 1 3 3 ~ ~ ~ 7 9 ~ o s t PC fiu Targer
PC *iusdd u.6 tiniu~jlim3afic~w~fiidin~'u Target PC L W I O I C ~ U ~ I ' I ~ Y I I ~ ~ O ~ miu~d
d V.7

reating xPC Target boot disk PI\!
q.4 I~I I~IU~~U~UIIUU~WI~~~Q~~ 4 4 .#
lun1snau~usruulutan1~~~~rl4ldsttnsuwtuuuulutn~ H O S ~ ~c Xau
ldrimsu MatlabISirnuljnlc ~ i n ~ u ~ ~ ~ i i m ~ ~ t d ~ ~ l d s t t n s u d ~ u u ~ n ] u ' ~ t n ~ o ~ Target PC d l ~ l u
nisnauqusruu
1~.r~m~unauqu~zpIpI~~~io1~d~i~~1oin~B
~~tmsunauquszsiuii1u5qwsqnszuonn~'i~m10jnqd niuisndon%ni.r~auqu
iirrl4t~uthnauquU"ats ~ ~ ~ ~ ~ l 4 ~ ~ i ? n ? ~ q ~ u ' ? l 3 i a 0 ~ n " ~ ~ n l 3 f i i ~ ~ f i l ~ n ~ ~ 9 f tuu&&i'au
%adiYuciiulou # q q i o l n a ~ ~ u d ~ i u a f w ~ 8 ~ z ~ n d ~ 1 d u ' ~ t i w ~ a ~ ~ DIA PCL 726 tCr'oiiu
nsr ttoldna~~uaian" itnz9"u#qqianaiu8u1un'qii&i'auitwas m EL 8 1 2 ~ 0 v
~ d r n m ~ r r n a q a ~ ~ u u a j ~ i ~ ~ ~ ~ ~
ldllrunsunauquszuuo'qdiooqn'q irinvazntilun~~n"uldstin.runauqus~iu~ilu 44 o, kwsqn.rruonn~isiAljna di~iiun~.munanauquu'aTsao~~a


1d.iun~un~qutwuq~u
Tdrrrnrunaur]urwu~iillu n1ui~nriionsi?n~ur]uIXi1ozl4~anauqu PID ntori?
nauquu'aTr rroz~iu1rnrdonZqqiol8it~.rii~z~~Z~~1ol81.r~.rdn~1t~uramai.ro~n
5uqfiiian' tYqjq1oldi.r5.ra1u6n"ad n?o8qryiolbi.r5.r& iiqladitunauqu~ii~uamI~ozQn
~i-r~~~b-ruw.r?-ro~ DIA PCL 726 L ~ ~ O / I ~ ~ ~ ~ ~ D I R ~ ~ O J ~ U ~ ~ ~ ~ P J ~ ~ ~ ~ ~ ~ ~ ~ I~:I~LLPI.I~.IP'I PCI
8133 lunls~9J$ndoin Encoder


i ; ~ i u i i a n a i t l X $ ' l n ~ n d i ~ i I ~ a ~ ~ u i inuqrzuumu i s t l a ~ n m . r l X R Y ~ u ~ ~ u i r ~ n ~ ~ A
NARMA % 4 ~ ~ ~ ~ ~ u i l a ~ . l n ? i ~ ~ ~ w " u s " ~ U ~ ~ - L O ? + P I V Q . ~ S : U U I U T : U U L ? ~ ~ I ~ ~ ~ F I L ~ Q . ~ ~ R U
9 - 2 3lu?bVFI.l K. S. Narendra LIIIL. S. Mukhopadhyay [12] !+%I~I~T$CJQ~?R~U
I A U ~ f.-'[.,.] ~ ~ m 3 i i i 3 n-i m~.auoa$.a6$u f Y e w riinucl!nmclu y(k), y(k + 1), ...y( k + n - 1) ~rm.ai;?aGq&p~&~~(k)
OI&J ~(k), u(k + I), ... u(k + n - 2) ibfl~;rnY?~~~h~d~,,- ,(k)
x = 0, ti,,-, = 0 ~ l f l ~ ~ ~ ~ ~ . I ~ ~ ~ ~ ~ ~ d ~ 0 1 8 (Implicit Function I'heory) AlU1IOLIAR.I x(k) Y
%u~duosnums~a'LdG
~ n u d ~ : R " x R " - ' -+R" i3u~-rA.a'uioiudo-rd~nin'aii;asn'u~~nu~aaLRn -4
x=o, Un-, = O Tnau ' a iu r i i a ~ n a x(k+n) o : u u A u t B e - r n ' i n ~ ~ ~ x(k)iln: i i 6 u Y
IJn = ~ ( k ) , u(k + I), ... u(k + n - 1) o:l6auflisaio!dG
x(k + n) = g[Yn(k),Un(k)l = g[y(k), y(k + I), ...y( k + n - I), u(k), u(k + I), .. .u(k + n - I)]
A d v d ~ n u d g : + w i~u~c6~ui~iuos~~~Innim~-rn"upanoJqn~1imm imza inauml
n.1 y(k + n) = h [x(k + n)] sz lk~uuhnoa NARMA ~ - r a u m ~ d o l d d
mnrzuumuauflir n.1 d r z r i u ~ u n ? i u ~ i u ~ u i (~elative Degree) i d i h d % ~ ~ n d
n a i k l ~ ~ u : ~ i t w a i o i o 1 6 ~ m ~ i a n i d eiom ~m:mtnroun~-rr:uu~~~~uiiniumr-r ( E X ~ C ~
Representation of The Systems) ~ # ~ ? u L L Y u ~ ~ D ~ NARMA kPk~ldd