12
NMT EE 589 & UNM ME 482/582 ROBOT ENGINEERING Dr. Stephen Bruder NMT EE 589 & UNM ME 482/582

NMT EE 589 & UNM ME 482/582
ROBOT ENGINEERING
Dr. Stephen Bruder NMT EE 589 & UNM ME 482/582

© 2011, Dr. Stephen Bruder
6. Trajectory Generation 6.3.3 A Linear Segment With Parabolic Blends
Thursday 25th Oct 2012 ME 482/582: Robotics Engineering
It is often desirable to minimize the time to traverse a joint trajectory.
○ Would like to move at a max constant joint rate.
○ To minimize time employ max joint acceleration to get to this constant joint rate
Linear segment
Parabolic
Blend
Parabolic
Blend
Slide 2 / 12

© 2011, Dr. Stephen Bruder
6. Trajectory Generation 6.3.3 A Linear Segment With Parabolic Blends
Thursday 25th Oct 2012 ME 482/582: Robotics Engineering
Assume that we start from a position 𝜃(𝑡0) ≐ 𝜃0 and come to rest at a final point 𝜃(𝑡𝑓) ≐ 𝜃𝑓.
Furthermore, assume that the manipulator was initially at rest 𝜃 (𝑡0) = 0, and that it will come to rest at the final point 𝜃 (𝑡𝑓) = 0.
○ Let’s allow 𝑡0 = 0, for simplicity’s sake!! (can always compensate afterwards)
Segment 1 :
Assume a constant acceleration of 𝜃 𝑡 ≐ 𝑎. Using a Taylor series expansion:
Thus, the position at the end of this segment is (6.5)
0 0( ) ( )t t 2
00 0 0
2
0
0[ ]
[ ] ( ) ,2
, [0, )2
b
b
t tt t t t t t
ta t t
2
0 1( )2
bb
tt a
Slide 3 / 12

© 2011, Dr. Stephen Bruder
6. Trajectory Generation 6.3.3 A Linear Segment With Parabolic Blends
Thursday 25th Oct 2012 ME 482/582: Robotics Engineering
The velocity at any time during this segment is
Thus, the velocity at the end of this blend segment is (say) (6.6)
Segment 2 :
A constant velocity of 𝜃 (𝑡) ≐ 𝑣 (6.7)
and
( )t at
( )b bt a t v
1( ) ( )[ ] ,b b b f bt t t t t t t t
1 2( ) [ 2 ]f b f bt t t t v
( ) ( ) ,b b f bt t v t t t t
Slide 4 / 12

© 2011, Dr. Stephen Bruder
6. Trajectory Generation 6.3.3 A Linear Segment With Parabolic Blends
Thursday 25th Oct 2012 ME 482/582: Robotics Engineering
Segment 3 :
A constant acceleration of 𝜃 𝑡 ≐ −𝑎
Thus, the position at the end of this segment is (6.8)
and the velocity at the end of this blend segment is
2
2
[ [ ]]( ) ( )[ [ ]] ( ) , ( )
2
f b
f b f b f b f b f
t t tt t t t t t t t t t t t
2
2( )2
bf b f
tt vt a
( ) [ [ ]]
0
fff b t tt t
b
t v a t t t
v at
2
2
[ [ ]][ [ ]]
2
f b
f b
t t tv t t t a
Slide 5 / 12
© 2011, Dr. Stephen Bruder
6. Trajectory Generation 6.3.3 A Linear Segment With Parabolic Blends
Thursday 25th Oct 2012 ME 482/582: Robotics Engineering
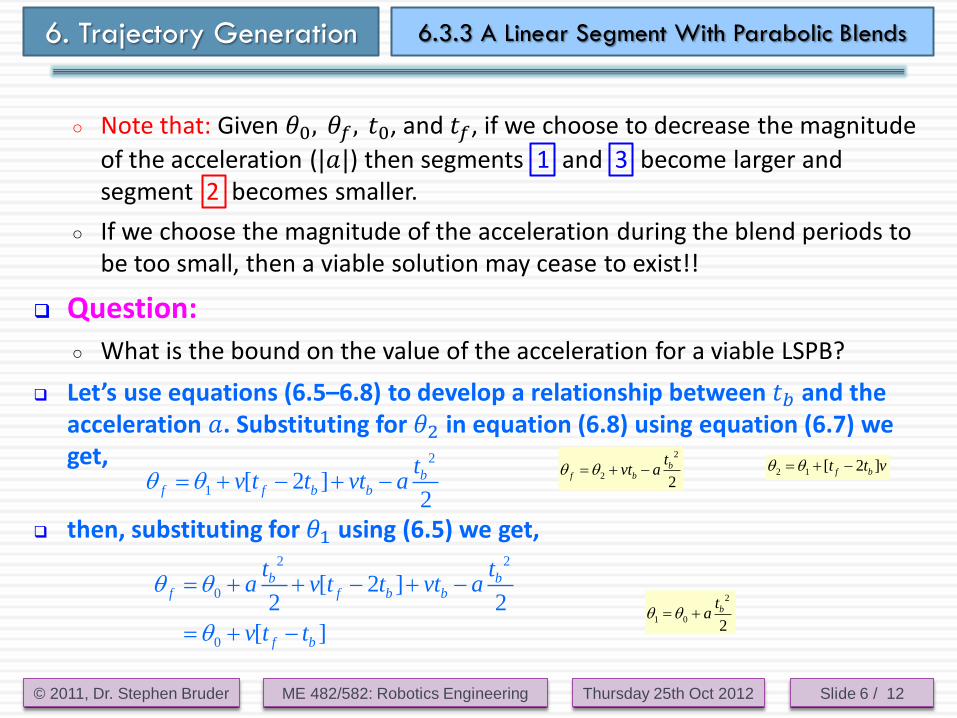
○ Note that: Given 𝜃0, 𝜃𝑓 , 𝑡0, and 𝑡𝑓, if we choose to decrease the magnitude
of the acceleration (|𝑎|) then segments 1 and 3 become larger and segment 2 becomes smaller.
○ If we choose the magnitude of the acceleration during the blend periods to be too small, then a viable solution may cease to exist!!
Question:
○ What is the bound on the value of the acceleration for a viable LSPB?
Let’s use equations (6.5–6.8) to develop a relationship between 𝑡𝑏 and the acceleration 𝑎. Substituting for 𝜃2 in equation (6.8) using equation (6.7) we get,
then, substituting for 𝜃1 using (6.5) we get,
2
1 [ 2 ]2
bf f b b
tv t t vt a
2 2
0
0
[ 2 ]2 2
[ ]
b bf f b b
f b
t ta v t t vt a
v t t
2
22
bf b
tvt a 2 1 [ 2 ]f bt t v
2
1 02
bta
Slide 6 / 12

© 2011, Dr. Stephen Bruder
6. Trajectory Generation 6.3.3 A Linear Segment With Parabolic Blends
Thursday 25th Oct 2012 ME 482/582: Robotics Engineering
Recalling the expression for 𝑣 from equation (6.6) gives
Solving for this quadratic in 𝑡𝑏 gives
○ Intuitively, from the diagram if 𝑡𝑏 ≥𝑡𝑓
2 , then a viable solution ceases to
exist!! or
(6.9)
0 [ ]f b f bat t t
2
0[ ] 0b f b fat at t
2 2
04 [ ]
2
f f f
b
at a t at
a
0
2
4[ ]f
f
at
2 2
04 [ ]
2 2
f ffa t at
a
bv a t
2 2
04 [ ] 0f fa t a
Slide 7 / 12

© 2011, Dr. Stephen Bruder
6. Trajectory Generation 6.3.3 A Linear Segment With Parabolic Blends
Thursday 25th Oct 2012 ME 482/582: Robotics Engineering
○ At the point where the equality holds (𝑎 =4[𝜃𝑓−𝜃0
𝑡𝑓2 ), the linear segment is
of length zero. This is known as a bang-bang parabolic blend!!
Slide 8 / 12

© 2011, Dr. Stephen Bruder
6. Trajectory Generation 6.3.3 A Linear Segment With Parabolic Blends
Thursday 25th Oct 2012 ME 482/582: Robotics Engineering
0 1 2 3 4 5 6 7 8 9 100
50
100
LSPB: 0=10°,
f=84°, t
f=10 sec, a=10 °/s2, v=8 °/s, t
b=0.8 sec
in
0 1 2 3 4 5 6 7 8 9 100
5
10
d/d
t in
/s
0 1 2 3 4 5 6 7 8 9 10
-10
0
10
d2/d
t2 in
/s2
Time in sec
0 1 2 3 4 5 6 7 8 9 100
50
100
LSPB: 0=10°,
f=84°, t
f=10 sec, a=5 °/s2, v=9 °/s, t
b=1.8 sec
in
0 1 2 3 4 5 6 7 8 9 100
5
10
d/d
t in
/s
0 1 2 3 4 5 6 7 8 9 10
-5
0
5
d2/d
t2 in
/s2
Time in sec
0 1 2 3 4 5 6 7 8 9 100
50
100
LSPB: 0=10°,
f=84°, t
f=10 sec, a=3 °/s2, v=15 °/s, t
b=5.0 sec
in
0 1 2 3 4 5 6 7 8 9 100
10
20
d/d
t in
/s
0 1 2 3 4 5 6 7 8 9 10
-20
2
d2/d
t2 in
/s2
Time in sec
0 2
2
4[ ]2.96 /
f
f
a st
A Bang-Bang
Parabolic Blend
a=10 /s2 a=5 /s2
a = 3 /s2
Slide 9 / 12
© 2011, Dr. Stephen Bruder
6. Trajectory Generation 6.4 Cartesian Space Schemes
Thursday 25th Oct 2012 ME 482/582: Robotics Engineering
Now specify the path in term of the tool pose
Can describe straight line Cartesian trajectories
Both position and orientation
Requires an inverse kinematic computation at each point
Describing the orientation can be challenging
○ Euler angles?
○ RPY angles?
○ Rotation matrix?
○ Angle/axis representation?
Slide 10 / 12

© 2011, Dr. Stephen Bruder
6. Trajectory Generation 6.4 An Example: Joint vs Cartesian
Thursday 25th Oct 2012 ME 482/582: Robotics Engineering
A Puma 560 example
○ Compare a Joint space vs Cartesian space trajectory
Slide 11 / 12
MATLAB Example
“Traj_gen1.m”

© 2011, Dr. Stephen Bruder
6. Trajectory Generation 6.4 An Example: Joint vs Cartesian
Thursday 25th Oct 2012 ME 482/582: Robotics Engineering
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-150
-100
-50
0
50
100
150
200Joint Space TG: Joint Angle Time History
Time in sec
Join
t A
ngle
in
1
2
3
4
5
6
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-150
-100
-50
0
50
100
150
200Cartesian Space TG: Joint Angle Time History
Time in sec
Cart
esia
n A
ngle
in
1
2
3
4
5
6
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
-0.5
0
0.5
Joint Space TG: Positional Time History
Tool P
ositio
n in m
px
py
pz
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
-1
-0.5
0
0.5
1
Joint Space TG: Axis of Rotation
Norm
aliz
ed U
nits
kx
ky
kz
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
100
150
200Joint Space TG: Angle of Rotation
Time in sec
Angle
in
Join
t Spa
ce T
raje
ctory
Gene
ration
Ca
rtesia
n Sp
ace
Tra
ject
ory
Gene
ration
Slide 12 / 12
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
-0.5
0
0.5
Cartesian Space TG: Positional Time History
Tool P
ositio
n in m
px
py
pz
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
-1
-0.5
0
0.5
1
Cartesian Space TG: Axis of Rotation
Norm
aliz
ed U
nits
kx
ky
kz
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
100
150
200Cartesian Space TG: Angle of Rotation
Time in sec
Angle
in

















