Nonlinear Optimization: Introduction Linear vs. nonlinear objective functions S Linear S Nonlinear When objective function is linear Optimum always attained at constraint boundaries A local optimum is also a global optimum When objective function is nonlinear Optima may be in the interior as well as at boundaries of constraints A local optimum is not necessarily a global optimum September 12, 2007 (1 : 6)
Transcript
Nonlinear Optimization: Introduction
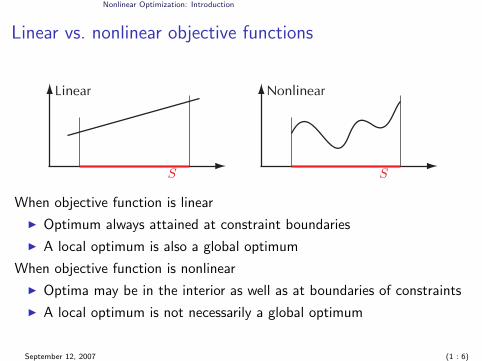
Linear vs. nonlinear objective functions
S
Linear
S
Nonlinear
When objective function is linear
I Optimum always attained at constraint boundaries
I A local optimum is also a global optimum
When objective function is nonlinear
I Optima may be in the interior as well as at boundaries of constraints
I A local optimum is not necessarily a global optimum
September 12, 2007 (1 : 6)
Nonlinear Optimization: Introduction
Convexity and optimality
A convex function f on aconvex set S :
f is below or on the linearinterpolant between any twopoints in the set x
1x2
®f(x 1
) +(1 ¡®
)f(x 2)
f(x)
x1, x2 ∈ S ⇒f(αx1 + (1− α)x2
)≤ αf (x1) + (1− α)f (x2) ∀α ∈ [0, 1]
Examples of convex functions on Rn
(a) f (x) = cTx (also concave!)(b) f (x) = γ + cTx + 1
2xTQx (Q positive semidefinite matrix)
September 12, 2007 (2 : 6)
Nonlinear Optimization: Introduction
S ⊂ Rn
Global minimizer:x∗ ∈ S such that
f (x∗) ≤ f (x) ∀x ∈ S
Local minimizer:x∗ ∈ S such that, for some ε > 0,f (x∗) ≤ f (x) ∀x ∈ S ∩ B(x∗; ε)
S
Global
LocalLocal
f(x)
where B(x ; ε): ball of radius ε centered at x
Theorem. For convex functions on convex sets holds that each localminimizer is a global minimizer
Example: minx
f (x) such that
Ax ≤ b,
where f (x) = cTx (linear program) orf (x) = γ+cTx + 1