Numerical Linear Algebra Chap. 3: Eigenvalue Problems Heinrich Voss [email protected]Hamburg University of Technology Institute of Numerical Simulation TUHH Heinrich Voss NLA: Chap.3, Eigenvalue Problems 2006 1 / 43
Transcript
Numerical Linear AlgebraChap. 3: Eigenvalue Problems
If λ is a root of χ of multiplicity k (i.e. the poynomial χ(λ) is divisable by(λ− λ)k but not by (λ− λ)k+1) then k is called the algebraic multiplicity of λ.The algebraic multiplicity of λ is denoted by α(λ).
For A ∈ Cn×n its characterictic polynomial χ has degree n. Hence, the sum ofall algebraic multiplicities of eigenvalues equals n.
If λ is an eigenvalue of A then
Eλ := {x ∈ Cn : (A− λI)x = 0}
is a subspace of Cn, which is called the eigenspace of A corresponding to λ.
γ(λ) := dim Eλ is the geometric multiplicity of an eigenvalue λ of A.
It can be shown that γ(λ) ≤ α(λ) for every eigenvalue λ.
More generally, if for all eigenvalues λj , j = 1, . . . , k of A the algebraic andgeometric multiplies coincide (α(λj) = γ(λj)), then choosing in each of theeigenspaces Eλj a basis x j,1, . . . , x j,α(λj ), the matrix
Let A be a Hermitian matrix. Then there exists a unitary matrix U ∈ Cn×n (i.e.UHU = I) such that
UHAU = diag(λ1, . . . , λn).
Let x1 be an eigenvector of A such that Ax1 = λ1x1 and (x1)Hx1 = 1. Thenfor x ∈ Cn such that xHx1 = 0 it holds
(Ax)Hx1 = xHAHx1 = xH(Ax1) = λ1xHx1 = 0.
Hence, V1 := {x ∈ Cn : xHx1 = 0} is an invariant subspace of A, andtherefore it contains an eigenvector x2 which can be normalized such that(x2)Hx2 = 1.If x1, . . . , x j are j orthogonal eigenvectors of A, then in the same way as before
Vj := {x1, . . . , x j}⊥ = {x ∈ Cn : xHx i = 0, i = 1, . . . , j}
is an invariant subspace of A, and hence there exists an eigenvector x j+1
which is orthogonal to x1, . . . , x j .U = (x1, . . . , xn) renders the desired property.
All elements of A are nonnegative, and every column of A adds to 1. Matriceswith these properties are called stochastic. They describe the behavior ofMarkov chaines.
If A is stochastic, then every row of AT adds to 1, and therefore (1, 1, . . . , 1)T
is an eigenvector of AT corresponding to the eigenvalue 1.
det(A− λI) = det(AT − λI)
implies that the eigenvalues of A and AT coincide. Hence, every stochasticmatrix has one eigenvalue λ = 1.
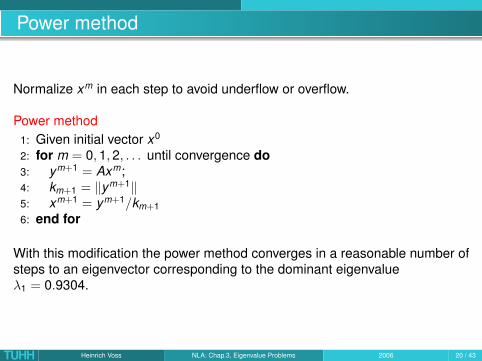
Normalize xm in each step to avoid underflow or overflow.
Power method1: Given initial vector x0
2: for m = 0, 1, 2, . . . until convergence do3: ym+1 = Axm;4: km+1 = ‖ym+1‖5: xm+1 = ym+1/km+16: end for
With this modification the power method converges in a reasonable number ofsteps to an eigenvector corresponding to the dominant eigenvalueλ1 = 0.9304.
demonstrates that the speed of convergence depends on
q := maxj=2,...,m
|λj ||λ1|
.
The smaller q is, the faster is the convergence of the power method.
If the initial vector x0 has no component of the eigenvector corresponding tothe dominant eigenvalue (i.e. α1 = 0), then in the course of the algorithmrounding errors usually produce a component of u1 which is amplified infurther iterations until convergence.
Starting the power method for A with a linear combination of eigenvectorscorresponding to λ2 and λ3 one obtains a reasonable approximation to aneigenvector corresponding to λ1 after 40 iterations.
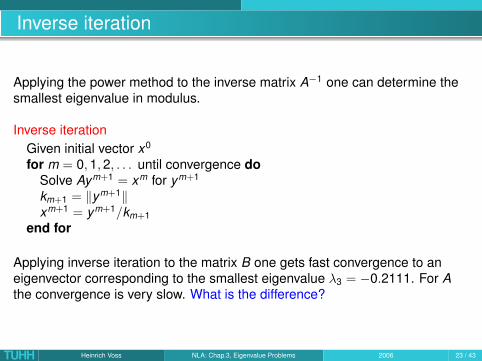
Applying the power method to the inverse matrix A−1 one can determine thesmallest eigenvalue in modulus.
Inverse iterationGiven initial vector x0
for m = 0, 1, 2, . . . until convergence doSolve Aym+1 = xm for ym+1
km+1 = ‖ym+1‖xm+1 = ym+1/km+1
end for
Applying inverse iteration to the matrix B one gets fast convergence to aneigenvector corresponding to the smallest eigenvalue λ3 = −0.2111. For Athe convergence is very slow. What is the difference?
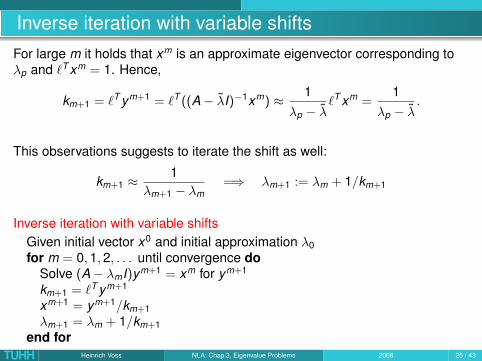
Inverse iteration with variable shiftsFor large m it holds that xm is an approximate eigenvector corresponding toλp and `T xm = 1. Hence,
km+1 = `T ym+1 = `T ((A− λI)−1xm) ≈ 1λp − λ
`T xm =1
λp − λ.
This observations suggests to iterate the shift as well:
km+1 ≈1
λm+1 − λm=⇒ λm+1 := λm + 1/km+1
Inverse iteration with variable shiftsGiven initial vector x0 and initial approximation λ0for m = 0, 1, 2, . . . until convergence do
Solve (A− λmI)ym+1 = xm for ym+1
km+1 = `T ym+1
xm+1 = ym+1/km+1λm+1 = λm + 1/km+1
end forTUHH Heinrich Voss NLA: Chap.3, Eigenvalue Problems 2006 25 / 43
Quadratic convergence
Let λ be an algebraically simple eigenvalue of A (i.e. λ is a simple root ofdet(A− λI) = 0), let u be a corresponding eigenvector such that `T u = 1.
Then inverse iteration with variable shifts converges locally and quadraticallyto (λ, u): There exists some positive constant C > 0 such that, if λ0 issufficiently close to λ and x0 is sufficiently close to u, then it holds
Assume that we have already obtained the largest (smallest, closest to agiven shift) eigenvalue λ and corresponding eigenvector u.How can we compute further eigenpairs by the power method?
Let y be a left eigenvector of A corresponding to some eigenvalue µ 6= λ, i.e.yT A = µy .
Let B := A− uwT , where w ∈ Rn satisfies wT u 6= 0
Bu = Au − uwT u = (λ− wT u)u,
i.e. u is an eigenvector of B corresponding to the eigenvalue λ− wT u.
With eigenvalue µ 6= λ of A and its corresponding left eigenvector y , it holds
yT B = yT A− yT uwT = λyT .
Hence, all eigenvalues of A are kept (only the right eigenvectors can change),whereas the eigenvalue λ− wT u can be moved anywhere by the choice of w(for instance to 0 to compute the second largest eigenvalue of A in modulus).
Let A = AT ∈ Rn×n be a symmetric matrix, λ an eigenvalue of A, and u acorresponding eigenvalue such that ‖u‖ = 1.
LetB = A− λuuT
If v ∈ Rn is an eigenvector of A (Av = µv ) such that vT u = 0 then
Bv = Av − uuT v = Av = µv
Hence, all eigenvalues of A which are different from λ are eigenvalues of B aswell. 0 is an eigenvalue of B replacing λ. If λ is a multiple eigenvalue of A,then λ is an eigenvalue of B, but the multiplicity is reduced by 1.
QR algorithm and power method ct.If (∗) is valid for some m − 1, then it follows from the definition of Am+1
Rm = Am+1QTm = UT
mAUmQTm = UT
mAUm−1
Multiplying by Sm−1 from the right und by Um from the left we obtain
UmSm = AUm−1Sm−1 = Am
which is the proposition for m.
From (∗) we obtain for the first unit vector e1 and ρ = (Rm)(1,1)
Ane1 = UmRme1 = ρUme1.
Hence, the first column has the same direction as the m-th iterate of thepower method with initial vector e1, and it is not surprising that r11 convergesto the largest eigenvalue of A in modulus and the first column to acorresponding eigenvector.
the upper triangular form appears after approximately 10 steps, and thediagonal elements are in the right order.
For
B =
1 0 12 3 −1−2 −2 2
the upper triangular form is arrived after approximately 20 steps, but thediagonal elements are not ordered by magnitude (So, the technical conditionof the last Theorem is not satisfied).After further 50 steps the diagonal elements are ordered by magnitude.
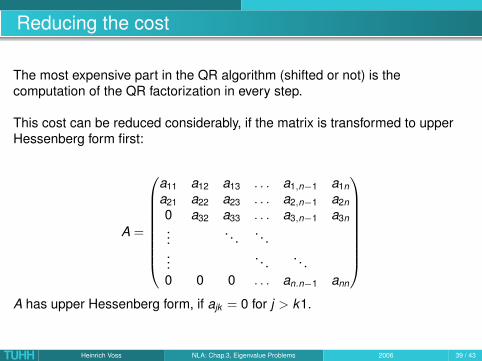
Assume that Am has upper Hessenberg form. Then a QR decomposition canbe obtained in the following way:
Multiply Am from the left by a rotation in the plane spanned by the first two unitvectors e1 and e2, i.e. by a matrix
U12 =
cos θ sin θ 0 0 . . . 0− sin θ cos θ 0 0 . . . 0
0 0 1 0 . . . 00 0 0 1 . . . 0...
......
. . ....
0 0 0 0 . . . 1
Then U12Am contains in its first two rows linear combinatiosn of the first tworows of A, and the rows 3, . . . , n are the same as in Am. The rotation anglecan be chosen such that the element in the position (2, 1) is annihilated.
Multiplying U12Am from the left by a rotation matrix U23 corresponding to rows2 and 3, we annihilate the element in position (3, 2), which does not changethe element 0 in the (2, 1) position.
Continuing that way we annihilate the elements in positions (i + 1, 1) by arotation Ui,i+1 in the plane spanned by ei and ei+1.
We finally arrive at
Un−1,n · . . . · · ·U23U12Am = R, i.e. Am = QR, Q = UT12 · · · · · UT