25
Oakland County Competitive Robotics Association Marc Center, GM Engineer, [email protected] OCCRA VEX Mentor Mark Taylor, Pontiac Teacher [email protected] OCCRA Vex Mentor
| Date post: | 17-Dec-2015 |
| Category: |
Documents |
| Upload: | adele-stanley |
| View: | 213 times |
| Download: | 0 times |

Oakland County Competitive Robotics Association
Marc Center, GM Engineer, [email protected] VEX Mentor
Mark Taylor, Pontiac [email protected]
OCCRA Vex Mentor

VEX WORKSHOP - Monday September 10, 2007
MEETING AGENDA
1 Handout VEX KITS2 BUILD Square Bot by 2nd meeting – focus
on programming Ver 1.1 OCCRA3 Handout VEX Kits – Kroll - later3 DEMO – LTU ROBOFEST4 OCCRA Rules/Field – 4:30 pm?5 Program Firmware with V5/V7?6 Paul Center’s Vex Robots7 Sam’s (Chief Delphi)Vex Robot8 Manually start autonomous operation

Bring Laptops with programming software – Easy C Ver 1.1 (OCCRA)
Workshop Homework – This week
Version 7 is latest Master Software
Bring Laptops with programming software – Ver 1.1

Lessons shared from existing VEX users
1) Motor module and Servo module look similar (both green)2) Shaft collars are required on the outputs of shafts but are not shown in the instructions3) Spacers are missing or use collars3) INFO –Bolt thread are #8-32 and wrench size is 11-324) TIP- Need to purchase more allen wrenches (5 ?)5) TIP-Charge up rechargeable battery pack, first thing6) TIP- Try to obtain a laptop that will be regularly used with the VEX robot to speed up development process7) 7) TIP - Use a start switch to activate the autonomous
Program and a separate stop switch for deactivation

VEX programming Workshop – Oakland Schools
Agenda – September 19, 2007
1) Get everyone to square one – be able to program robot2) Answer any outstanding questions3) Are ball casters legal? 2WD versus 4WD4) General Programming Techniques – VEX manual5) Line following algorithm development6) Advanced Control Concepts (post High School)
• Hysteresis (switchpoint with ‘gap’)• Transport Delay or Time (hot/cold in shower)• Programming Loop Time (39x/second?)• Write Statements for Debugging (10 msec?)• Calibration & Methodology• Adaptive Algorithms (self-correcting)
7) VEX Computer Programs - Examples

1) Everyone needs toget to this pointbefore we move on

2) Answer any outstanding Questions
10 teams represented at workshop 6 student’s from teams represented Most have Basic programming experience 5 teams had “Square-bot” buildOne team had “bad” VEX controller that was replaced
OCCRA needs to upgrade to later VEX Software 2.8 for 2008$500 for 25 versions (Intellitek Easy C software site license)

3A) Are Ball Casters (Tamiya?) legal for OCCRA?Yes, as commercially available parts.One can also use OMNI-wheels, providedIn the VEX kit, for 90 degree turning.
3B) Can OCCRA playing field black line bereplaced/enhanced with ¾ inch, black, Standard, electrical tape? – Yes. Plans areto coat the board with Home Depot, BEHR,Semi-gloss white paint.

Tamiya Ball Caster(small) suitable forVex operation.

4) General Programming Tips from VEX manual
1) Save your program often, in a new file so that you have a string of files, especially at the end of class, session or after having completed a “milestone”. It is a good practice to save every 15 minutes during “heavy activity” times.2) Use a file index system (Team1286_VEX_YY1)3) Copy your files to thumb drive for movement to new Laptop4) Program one part at a time and debug one part at a time5) Try to think like the VEX controller when programming and debugging (process of making your program operate the way your think it should – design intent) your program6) Work with a partner if possible – “two head’s better than one”7) Pick a “smart” partner and/or a “cute” partner, your choice8) 80/20 rule – 20 percent building / 80 percent programming9) After two hours maximum of programming – take a break10) Don’t bother with high-school “overnighters”

Line Following Algorithm Development
In mathematics, computing, linguistics, and related disciplines, an algorithm is a finite list of well-defined instructions for accomplishing some taskthat, given an initial state, will proceed through a well-defined series of successive states,possibly eventually terminating in an end-state
Algorithm – definition from Wikepedia
In our case, we are initially concerned with developing anAlgorithm to have the robot follow a black, straight linefor a known distance (OCCRA VEX play field)

Line Following Algorithm Development
1) Use Start button ,Make robot move forward (2 motors)somewhat straight, then use Stop button to halt. Whencompleted robot moves forward, somewhat slowly.
2) Figure out how to mount the two/three light sensorsnear the black line. Mount the two lights sensors initially aAt least one inch on each side of the black electrical tape.Make sure you know which analog light sensor corresponds to which input for future programming.
3) Good practice to make up a simple one page sheet thatshows where everything is connected (Appendix A)
4) Determine what light sensor value corresponds to black,white for reference (Adaptive programming later).

Line Following Algorithm Development
5) Determine what value of motor speed corresponds toallowing the motor to move the robot in the opposite direction
6) One possible algorithm, when left light sensor indicates black line, speed up right motor, when right light sensor indicates black line, speed up left motor.
7) Calibrate (adjust speed) the wheel speed value so that it slowly navigates the black line without “getting lost”
8) Iteratively increase the wheel speed and/or move the light sensors closer to the black line (tape). Experiment.
Line Following Algorithm Development
1) Advanced Control Concepts (post High School)• Hysteresis (adjustable on/off threshold)• Transport Delay or Time (wait after executing command)• Programming Loop Time (39x/second?)• Write Statements for Debugging (10 msec each)• Calibration & Methodology • Adaptive Algorithms (self-correcting)The light sensor should have calibration valuesTo be used for setting the black/light value in your program.When you arrive at a competition, place your robot onthe playing field to determine the black/light value.Simple way is Dark = Calibration value Light = Calibration value

7) Mark Taylor/Marc Center Computer Programs - Examples
The following program was created by Mark Taylor from Marc/Paul Center’s original Line Follower program for use at the LTU Robofest competition in 2006.It has not been tested in a robot but should help guide youin the right direction in creating your own line followingprogram.Note that Bumper Switch used to stop the program andCalibration Values are not used for the motor speedsor the light threshold values (also not adaptive).

7) Mark Taylor/Marc Center Computer Programs - Examples

7) Mark Taylor/Marc Center Computer Programs - Examples

7) Mark Taylor/Marc Center Computer Programs - Examples

7) Mark Taylor/Marc Center Computer Programs - Examples
Caution: Use PrintToScreen statements sparingly.They consume a lot of programming timeAnd make your Robot behave differently when removed

ProgrammingGotcha:Limit switchImpacts Motors4 though 7
Solution:Use Motors 1&2for propulsion3 Motor/ServoBefore using others

ProgrammingGotcha:Limit switchImpacts Motors4 though 7
Solution:Use Motors 1&2for propulsion3 Motor/ServoBefore using others

Student can useJumpers to programonly one program inthe VEX controllerand select whichprogram to operate1) Straight ahead2) Left Hook (Red Field)3) Blue Hook (Right Field)
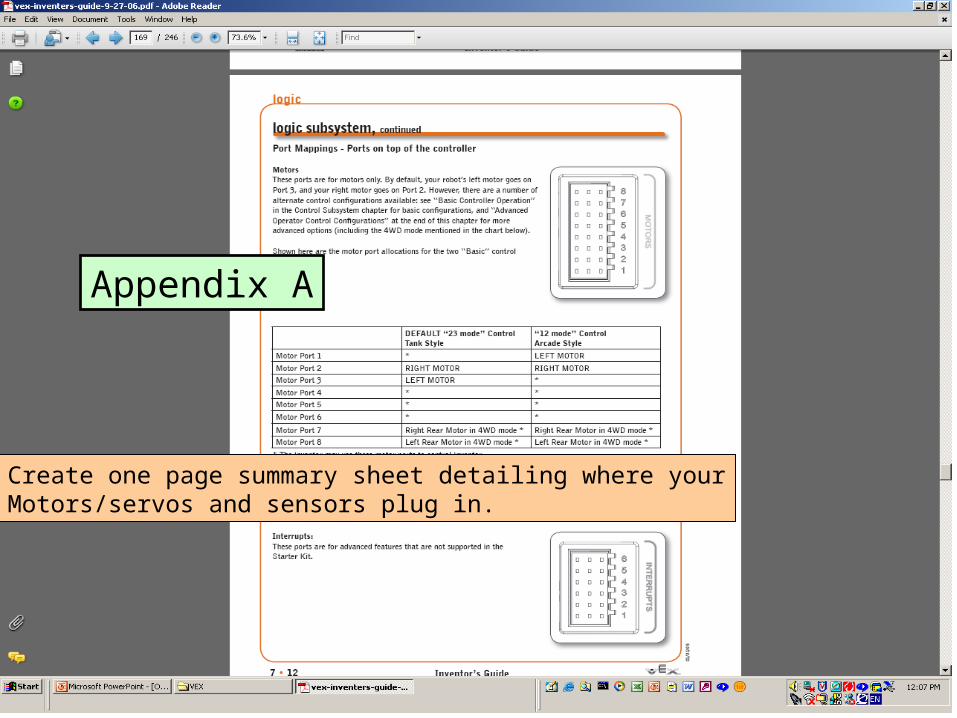
Appendix A
Create one page summary sheet detailing where yourMotors/servos and sensors plug in.

Appendix A
Create one page summary sheet detailing where yourMotors/servos and sensors plug in.

OCCRA needs to upgrade to VEX Software 2.8 for 2008$500 for 25 versions (Intelitek Easy C software site license)
Future OCCRA VEX Action Items

















