1. INTRODUCTIONSpeckle imaging possesses an unwanted requirement:the need for simultaneous measurements from a refer-ence source. Such measurements are used to estimatethe modulus of the atmosphere–telescope optical transferfunction, also known as the speckle transfer function.With the use of this information, a simple deconvolutionprocedure renders the object Fourier modulus. This setof extra measurements represents a burden that is desir-able to eliminate. For this reason blind-deconvolutionand phase-diversity techniques are becoming increasinglyimportant in astronomical imaging.1–4 Blind-deconvolution methods use a small set of speckle imagesin(x, y) to estimate both an object o(x, y) (constant) anda system point-spread function (PSF) hn(x, y) (variable),which satisfy the condition
in~x, y ! 5 o~x, y ! * hn~x, y !, (1)
where * represents the convolution operator. An alterna-tive method to eliminate the need of reference star mea-surements can be based on the fact that the bispectraltransfer function is real valued,5 and there is no need, atleast in principle, to compensate with a system bispectraltransfer function [this is not necessarily the case for mea-surements at longer wavelengths (infrared) or when tele-scope aberrations are important6]. In this paper twominimization schemes are proposed to recover both objectFourier modulus and phase from the bispectral phasealone. Under these approaches the fitting to the bispec-tral phase is carried out through the minimization of pha-sor differences, since it proved to be superior than theminimization of modulo 2p phase differences.7 A similarimplementation to one described below, but making use ofmodulo 2p phase differences and addressing the case ofsimpler and high-light-level objects, has been reported inRef. 8.
The use of the bispectrum as a tool to handle the phaseretrieval problem associated with speckle interferometryhas been examined by the author in Ref. 9. In that paperthe basic concepts and equations involved in bispectralimaging are discussed, along with examples using simu-
lated and real astronomical data. This paper constitutesan extension of the previous work and is closely related toRef. 9. The material has been organized as follows: Sec-tion 2 describes briefly the use of the bispectrum as a toolfor recovering high-resolution images, using the fact thatthe object Fourier phase is encrypted in the bispectralphase calculated from a set of turbulence-degraded short-exposure speckle frames. In Section 3 the problem of re-covering both object Fourier modulus and phase throughthe minimization of such Fourier components is ad-dressed. Section 4 presents a second approach to theproblem, performing the minimization directly over theimage components. Examples with both simulated andreal speckle data are given in Section 5. The concludingremarks are presented in Section 6.
2. BISPECTRAL IMAGINGAlthough the method of speckle interferometry offers thepossibility of extracting object information not retrievablefrom a single image, this information is generally incom-plete: the object phase is lost. Attempts to form images,through estimation of the missing Fourier phase, fromspeckle data by using correlation techniques began withthe Knox–Thompson algorithm10 and were later general-ized by Weigelt5 in a method using the triple correlationor its Fourier transform, the bispectrum.5,11–13 Bispec-tral imaging is now recognized as a successful method toobtain the phase information needed to form approxi-mated diffraction-limited images from ground-based tele-scopes.
The idea behind bispectral imaging is simple. Thebispectrum of a two-dimensional object o(x, y) is definedby
O ~3 !~u1 , v1 , u2 , v2!
5 O~u1 , v1!O~u2 , v2!O* ~u1 1 u2 , v1 1 v2!
5 uO ~3 !~u1 , v1 , u2 , v2!uexp@ib~u1 , v1 , u2 , v2!#, (2)
where O(u, v) represents the Fourier transform of theobject. Analogously to the way in which the average en-
1998 Optical Society of America
1788 J. Opt. Soc. Am. A/Vol. 15, No. 7 /July 1998 Pedro Negrete-Regagnon
ergy spectrum of the speckle data set is calculated (see,for instance, Refs. 9 and 14), it can be shown that the av-erage bispectrum of the image data is related to the objectbispectrum—a deterministic quantity—by
^In~3 !~u1 , v1 , u2 , v2!&
5 O ~3 !~u1 , v1 , u2 , v2!^Tn~3 !~u1 , v1 , u2 , v2!&, (3)
where ^Tn(3)(u1 , v1 , u2 , v2)& is known as the bispectral
transfer function. Lohmann et al.11 have proved thatthis bispectral transfer function also transmits informa-tion in frequencies until the telescope diffraction limit.An important characteristic of ^Tn
(3)(u1 , v1 , u2 , v2)& isthat it is real valued15 (its phase is effectively zero), giv-ing as a result that the phase of the average bispectrum ofthe image equals the bispectral phase b(u1 , v1 , u2 , v2)of the object. The relation between the bispectral phaseb and the object phase f is given by
b~u1 , v1 , u2 , v2! 5 f~u1 , v1! 1 f~u2 , v2!
2 f~u1 1 u2 , v1 1 v2!. (4)
Equation (4) represents a relatively simple relation, andseveral methods have produced successful results recon-structing the object phase from the bispectral phase (anextended list of references regarding this subject is givenin Ref. 9).
In Sections 3 and 4, two weighted least-squares strate-gies are employed to obtain not only the object Fourierphase but the object Fourier modulus as well. In thisway the extra set of measurements on a reference star isavoided. A detailed description of the practical aspects ofthe evaluation of the bispectrum, including the geometry,signal-to-noise ratio (SNR) expressions, and examples, isgiven in Ref. 9. The notation used in this paper followsthe one employed in that reference.
3. MINIMIZATION OF E2 BY VARYINGFOURIER COMPONENTSConsider the following objective function [Eq. (45) in Ref.9]:
E2 5 (l5lmin
lmax
(k5kmin
kmax
(j51
n col
(i51
n row
$@Re~D i jkl!#2
1 @Im~D i jkl!#2%SNRi jkl
b , (5)
where D i jkl measures the misfit between phasors,
D i jkl 5 exp~ib i jkl8 ! 2 exp@i~f i j 1 fkl 2 f i1k, j1l!#,(6)
with
Re~D i jkl! 5 cos~b i jkl8 ! 2 cos~f ij 1 fkl 2 f i1k, j1l!, (7)
Im~D i jkl! 5 sin~b i jkl8 ! 2 sin~f ij 1 fkl 2 f i1k, j1l!. (8)
In these expressions (i, j, k, l) represent points in a four-dimensional space, b i jkl8 is the modulo 2p wrapped ver-sion of the bispectrum taken from the subplanes(kmin : kmax , lmin : lmax), and the weighting factor SNRi jkl
b
is the single-frame bispectral-phase SNR as defined inRef. 13. This objective function E2 acts as a single mea-
sure of the misfit (mean square error) between the aver-age bispectral phase obtained from the speckle imagesand the resulting bispectral phase estimated from the cal-culated object Fourier phases at each minimization itera-tion. The use of the weighting function SNRi jkl
b guaran-tees that those points with higher SNR have adequatepriority when the phase values are assigned. A detailedexplanation for these terms is given in Ref. 9.
With this scheme the goal is to find a set of nonredun-dant Fourier components, real and imaginary, satisfyingtwo conditions: (1) they produce a Fourier phase thatminimizes the objective function E2 , and (2) the inverseFourier transform of this component results in a positiveimage. (A third condition related to object support can beadded, as discussed below.)
The relation between an image i(x, y) and its Fourierphase is given by
f~u, v ! 5 arctanXIm@F $i~x, y !%#
Re@F $i~x, y !%#C, (9)
where F $i(x, y)% represents the Fourier transform ofi(x, y). In discrete form Eq. (9) can be expressed as
fmn 5 arctan~I mn /Rmn!, (10)
where I mn represents an odd array containing the imagi-nary part of the image–Fourier spectrum and Rmn corre-sponds to the even real part. For practical minimizationpurposes, both can be compressed in the array F mn5 (Rmn I mn).
For the first condition, the quantity to minimize is
E2~F mn!, (11)
with a gradient given by
]E2
]F mn5
]E2
]fmn
]fmn
]F mn. (12)
The first term on the right-hand side of Eq. (12) is givenby
]E2
]fmn
5 (l5lmin
lmax
(k5kmin
kmax
@2 Re~Dmnkl!sin~fmn 1 fkl 2 fm1k,n1l!
2 2 Im~Dmnkl!cos~fmn 1 fkl 2 fm1k,n1l!#SNRmnklb
1 (j51
n col
(i51
n row
@2 Re~D ijmn!sin~f ij 1 fmn 2 f i1m, j1n!
2 2 Im~D ijmn!cos~f ij 1 fmn 2 f i1m, j1n!#SNRijmnb
1 (l5lmin
lmax
(k5kmin
kmax
@2 Im~Dm2k,n2l,k,l!cos~fm2k,n2l
1 fkl 2 fmn! 2 2 Re~Dm2k,n2l,k,l!sin~fm2k,n2l
1 fkl 2 fmn!# * SNRm2k,n2l,k,lb . (13)
Pedro Negrete-Regagnon Vol. 15, No. 7 /July 1998 /J. Opt. Soc. Am. A 1789
For the second term, two cases can be identified:• F mn 5 Rmn :
]fmn
]F mn5
]fmn
]Rmn5 2
I mn
Rmn2 1 I mn
2 , (14)
• F mn 5 I mn :
]fmn
]F mn5
]fmn
]I mn5
Rmn
Rmn2 1 I mn
2 . (15)
The constraints of evenness and oddness for the arraysRmn and I mn guarantee a real-valued image. For a de-tailed description on how these constraints are imple-mented, based on the nonredundant elements and thesymmetry regions in the Fourier arrays (real and imagi-nary), refer to Subsection 6.A of Ref. 9. The second con-dition, image positivity, can be enforced by adding to theobjective function (11) the following constraint:
Ei 5 (i
(j
S uiiju 2 iij
2 D 2
, (16)
where ii j is the real-valued array resulting from Fourier-transforming F mn . The gradient for this positivity con-straint is given by
]Ei
] F mn5
]Ei
] ii j
] ii j
] F mn, (17)
where
]Ei
] ii j5 H 0
2~ uii ju 2 ii j!
if iij > 0if iij , 0. (18)
The discrete inverse Fourier transform is usually de-fined as
iij 5 (m51
M
(n51
N
~Rmn 1 iI mn!
3 expH i2pF ~i 2 1 !~m 2 1 !
M1
~ j 2 1 !~n 2 1 !
N G J ,
(19)
where (i, j) represent points in a two-dimensionalM 3 N image, (m, n) are points in the image–Fourierplane, and i 5 A21. With this definition the two casesfor the last term in Eq. (17) become
• F mn 5 Rmn :
] iij
]F mn5
] iij
]Rmn5 cos~2pQ! 1 i sin~2pQ! 5 cos~2pQ!,
(20)
• F mn 5 I mn :
] iij
]F mn5
] iij
]I mn5 2sin~2pQ! 1 i cos~2pQ!
5 2sin~2pQ!, (21)
where
Q 5~i 2 1 !~m 2 1 !
M1
~ j 2 1 !~n 2 1 !
N. (22)
As mentioned above, the constraints of evenness andoddness imposed over Rmn and I mn guarantee a real-valued image. This fact allows us to neglect the imagi-nary terms in Eqs. (20) and (21). The expressions forEqs. (20) and (21) assume a definition for the discrete in-verse Fourier transform without a multiplicative con-stant. If typical constants such as 1/AMN or 1/MN areemployed, as in many cases by fast Fourier transformroutines, they must be introduced in the above expres-sions.
The minimization procedure must be carried over thetwo functions
E2~F mn! 1 Ei~F mn!, (23)
with the gradient given by
]E2
]Rmn1
]Ei
]Rmn5
]E2
]fmn
]fmn
]Rmn1
]Ei
] iij
] iij
]Rmn, (24)
]E2
]I mn1
]Ei
]I mn5
]E2
]fmn
]fmn
]I mn1
]Ei
] iij
] iij
]I mn. (25)
The evaluation of the cost function (23) and its gradientis computationally expensive, given the need to calculatecosine and sine terms for every combination of image-plane and Fourier-plane coordinates. The minimizationprocedure was carried out by using the unconstrainedconjugate gradient routine E04DGF from the NumericalAlgorithms Group (NAG) FORTRAN library16 as describedin Ref. 9.
Results obtained following this scheme show a regularminimization performance, where a solution is normallyfound, although not with ease. Unfortunately, given thereduced information available (only bispectral phase),such a solution is not necessarily unique. As an example,Fig. 1(a) shows the bispectral phase associated with thesmall simulated object depicted in Fig. 1(b)(1), togetherwith five other nonnegative objects that produce the samebispectral phase. Clearly, only the objects in Figs. 1(b)(3)and 1(b)(4) resemble (barely) the true object in Fig.1(b)(1).
Under normal circumstances the object is known to bebound. If a support sij for the image can be specified, anadditional constraint to minimize information outsidethat support can be added as
Es 5 (i
(j
~iij 2 iijsij!2, (26)
with the gradient
]Es
] iij5 2~iij 2 iijsij!~1 2 sij!. (27)
In practice, the minimization of such a function as E21 Ei 1 Es becomes difficult, since a perturbation in onesingle Fourier component affects the overall image with asine or cosine function. This obviously alters the valuesfor the positivity and support functions, defined in a dif-ferent plane (the image plane), and stagnation problemsare frequent. It would be desirable to code an ‘‘intelli-gent’’ algorithm, capable of deciding when it is better tosacrifice, for instance, support for a better bispectral fit-ting or nonnegativity for support. For this particular
1790 J. Opt. Soc. Am. A/Vol. 15, No. 7 /July 1998 Pedro Negrete-Regagnon
Fig. 1. Five different nonnegative objects reconstructed from the bispectral phase of a simulated object. Sixteen subplanes (k5 0, ..., 3, l 5 0, ..., 3) of the bispectral phase are illustrated in (a). The original object is shown in (b)(1). The minimization has beencarried out over E2 by varying the real and imaginary image–Fourier components.
implementation of the algorithm, no weighting factorswere employed for the positivity and support constraints.The reader may like to review how increasing suchweights can, at least in a blind-deconvolution scheme, im-prove the reconstruction. This can be found in Ref. 17.
A different solution, probably better but certainly farmore difficult, could be based on the formulation of thepositivity and support constraints in the same Fourierplane as the variable quantities, namely, the image–Fourier components Rmn and I mn .
4. MINIMIZATION OF E2 BY VARYINGIMAGE COMPONENTSA second approach to recover both object Fourier modulusand phase from the bispectral phase is based again on theminimization of the quantities E2 and Ei , but this timeas a function of the real-valued image components iij :
E2~iij! 1 Ei~iij!, (28)
with a gradient given by the expression
Pedro Negrete-Regagnon Vol. 15, No. 7 /July 1998 /J. Opt. Soc. Am. A 1791
]E2
]iij1
]Ei
]iij5
]E2
]fmn
]fmn
]iij1
]Ei
]iij. (29)
All the terms in Eq. (29) have been calculated in Section3, except for the partial derivatives of the phase againstthe image components. Such a term is given by
]fmn
]iij5
]arctan~arg!
]arg] arg]iij
, (30)
where
arg 5I mn
Rmn, (31)
]arctan~arg!
]arg5
1
1 1 arg2 5Rmn
2
Rmn2 1 I mn
2 . (32)
The expression for ] arg/]iij is given by
]arg
]iij5
Rmn
]I mn
]iij2 I mn
]Rmn
]iij
Rmn2 , (33)
where
]Rmn
]iij5 cos~2pQ!, (34)
]I mn
]iij5 2sin~2pQ!. (35)
Finally, with the substitution of Eqs. (34) and (35) intoEq. (33), and this and Eq. (32) into Eq. (30), the expres-sion for the derivative of the phases fmn against the im-age iij becomes
]fmn
] ii j5 2
Rmn sin(2pQ) 1 I mn cos(2pQ)
Rmn2 1 I mn
2 . (36)
There are several things to be taken into account forthe implementation of this algorithm. First, the choice ofinitial guess. A logical choice is given by the system PSF.In my experience the minimization procedure reproducesthis PSF at the different locations in the image planewhere the value of E2 decreases. The location of thebrightest spot at the reconstructed image will be given bythe location of the PSF at the initial guess. With use ofthe system PSF, a practical problem during the evalua-tion of the objective function gradient is likely to occur:the Fourier transform of such a PSF is band limited, or inother words, its values are different from zero only insidethe telescope diffraction-limit cutoff. For those frequen-cies outside this spectral support, the values are near themachine precision. By examination of Eq. (36), it is pos-sible to note that for those coordinates m and n in Fourierspace for which the square modulus Rmn
2 1 I mn2 is
small, the calculation for the partial derivatives ]fmn /]iijwill result in extremely large and incorrect values. Apractical solution to this problem consists of the introduc-tion of a binary mask to block, or set to zero, those spec-tral values outside the telescope diffraction limit.
A far more difficult problem is stagnation. Again, thecomplicated relation between the two planes (image andFourier) leads the minimization invariably to stagnationafter a few iterations of the conjugate gradient routine.The minimization procedure then needs to be restarted,and if the perturbation produced by the initial step lengthis strong enough, the solution will be driven toward theglobal minimum. Unfortunately, a finer search is de-cided automatically by the routine after a few calculationsof the objective function, resulting in a smaller steplength and consequently in its being unable to improvethe current estimate.
Under those conditions the overall minimization can bedescribed as formed by two iterative processes: an inner
Fig. 2. Five object estimates, at different levels of stagnation, reconstructed from the bispectral phase. The bispectral phase corre-sponds to the one shown in Fig. 1(a). The original object is shown in (1). The minimization has been carried out over E2 by varyingimage components.
1792 J. Opt. Soc. Am. A/Vol. 15, No. 7 /July 1998 Pedro Negrete-Regagnon
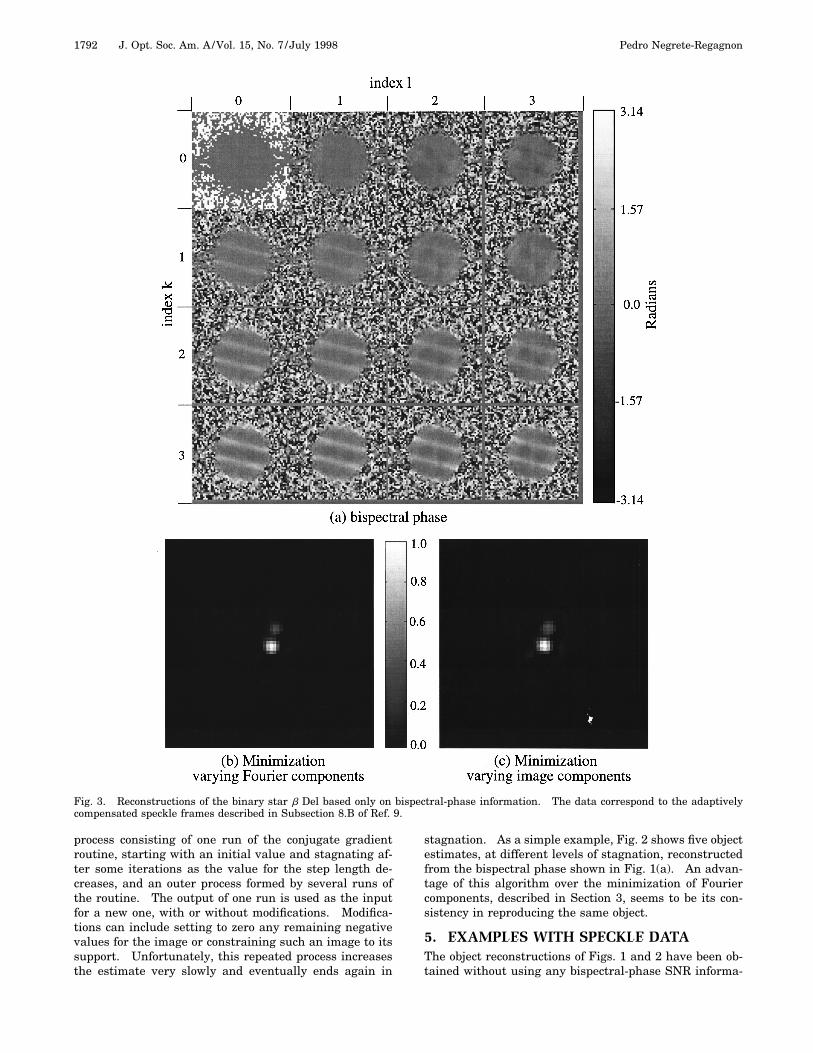
Fig. 3. Reconstructions of the binary star b Del based only on bispectral-phase information. The data correspond to the adaptivelycompensated speckle frames described in Subsection 8.B of Ref. 9.
process consisting of one run of the conjugate gradientroutine, starting with an initial value and stagnating af-ter some iterations as the value for the step length de-creases, and an outer process formed by several runs ofthe routine. The output of one run is used as the inputfor a new one, with or without modifications. Modifica-tions can include setting to zero any remaining negativevalues for the image or constraining such an image to itssupport. Unfortunately, this repeated process increasesthe estimate very slowly and eventually ends again in
stagnation. As a simple example, Fig. 2 shows five objectestimates, at different levels of stagnation, reconstructedfrom the bispectral phase shown in Fig. 1(a). An advan-tage of this algorithm over the minimization of Fouriercomponents, described in Section 3, seems to be its con-sistency in reproducing the same object.
5. EXAMPLES WITH SPECKLE DATAThe object reconstructions of Figs. 1 and 2 have been ob-tained without using any bispectral-phase SNR informa-
Pedro Negrete-Regagnon Vol. 15, No. 7 /July 1998 /J. Opt. Soc. Am. A 1793
tion (it has been set to unity for all frequencies). A com-parison of both algorithms attempting to reconstruct areal object is shown in Fig. 3. These examples corre-spond to low-light-level data collected from the binarystar Beta Delphinis (b Del) on September 16–21, 1993.The experiments were performed on the 1.5-m telescopeat the Starfire Optical Range, operated by the U.S. AirForce Phillips Laboratory in Albuquerque, New Mexico.The data set was collected by using an adaptively com-pensated system employing a laser beacon for wave-frontcompensation. A more detailed description of the systemand the processing steps involved can be found in Section8 of Ref. 9.
b Del is an '0.2-arc sec-separation binary star thathas become a classical test object for all postdetection im-aging methods and more recently for adaptive-optics-compensated systems. The star is just resolvable for the1.5-m telescope used at the Starfire Optical Range, butthe atmospheric turbulence blurs the image into a spotwith a full width at half-maximum of typically 1 arc sec,making it impossible to differentiate the components ofthe star. The resolution can be increased greatly byadaptive optics compensation, but because the stars areso close, a clear image is still difficult to obtain.
Figure 3(a) shows the 16 bispectral-phase subplanesused to reconstruct the object. This number of subplaneswas chosen in order to compare the reconstructed imageswith the traditional bispectral-phase algorithm presentedin Ref. 9. It is known that the accuracy of reconstruc-tions improves as the number of subplanes increases,8 butthe computational cost is not necessarily worthwhile,
given the redundancy that is due to the bispectrum’s sym-metry. On the other hand, the subplanes chosen, thosewith small (u2 , v2), possess the highest SNR and areenough to recover the object. The reconstruction in Fig.3(b) minimizes E2 by varying the Fourier components ac-cording to the algorithm described in Section 3. Figure3(c) shows a very similar reconstruction, but one that em-ploys the minimization algorithm that varies image com-ponents iij . In both cases the telescope PSF has beenused as initial estimate (or its Fourier components, in thecase of the first algorithm). The reconstructions corre-spond to real-valued positive objects, with the samebispectral phase, and match the expected solution. Bothimages are identical and almost indistinguishable fromthe reconstructions that make use of reference star infor-mation (see Fig. 17 of Ref. 9).
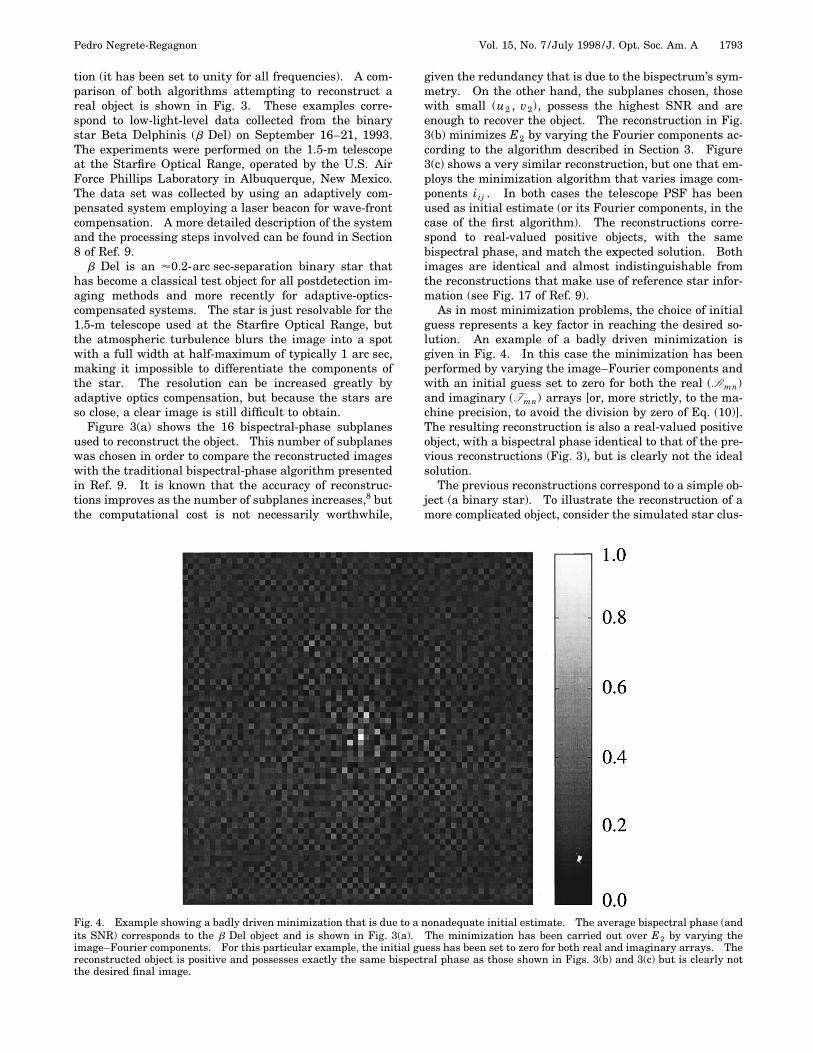
As in most minimization problems, the choice of initialguess represents a key factor in reaching the desired so-lution. An example of a badly driven minimization isgiven in Fig. 4. In this case the minimization has beenperformed by varying the image–Fourier components andwith an initial guess set to zero for both the real (Rmn)and imaginary (I mn) arrays [or, more strictly, to the ma-chine precision, to avoid the division by zero of Eq. (10)].The resulting reconstruction is also a real-valued positiveobject, with a bispectral phase identical to that of the pre-vious reconstructions (Fig. 3), but is clearly not the idealsolution.
The previous reconstructions correspond to a simple ob-ject (a binary star). To illustrate the reconstruction of amore complicated object, consider the simulated star clus-
Fig. 4. Example showing a badly driven minimization that is due to a nonadequate initial estimate. The average bispectral phase (andits SNR) corresponds to the b Del object and is shown in Fig. 3(a). The minimization has been carried out over E2 by varying theimage–Fourier components. For this particular example, the initial guess has been set to zero for both real and imaginary arrays. Thereconstructed object is positive and possesses exactly the same bispectral phase as those shown in Figs. 3(b) and 3(c) but is clearly notthe desired final image.
1794 J. Opt. Soc. Am. A/Vol. 15, No. 7 /July 1998 Pedro Negrete-Regagnon
Fig. 5. Reconstruction of a simulated star cluster: (a) object recovery with use of the conventional phase-only bispectral technique, (b)reconstruction based only on bispectral phase information. The original object and the speckle data set are described in Fig. 12 of Ref.9. The object was recovered by using 16 bispectral subplanes (k 5 0, ..., 3, l 5 0, ..., 3), and the minimization was carried out overimage–Fourier components for the results shown in (b). The associated Fourier moduli and phases are compared in Fig. 6 below. Thecontour lines correspond to the area indicated by the white rectangles in the images.
ter presented in Fig. 12 of Ref. 9. Because of the size ofthe object (128 3 128 pixels), the minimization proce-dure was slow, especially when the variables were the im-age components. Apart from the running-time differ-ence, both minimization schemes showed a similarperformance, and the reconstruction reached by minimiz-ing image–Fourier components is shown in Fig. 5. Thefigure also shows the reconstruction obtained from a con-ventional phase-only bispectral algorithm and makinguse of reference star information (see Fig. 13 of Ref. 9).In both reconstructions the cluster components can beidentified. A comparison of Figs. 5(a) and 5(b) showsthat the use of reference star measurements still providesa better estimate of the object. A more detailed compari-son is shown in Fig. 6, where the estimated Fouriermoduli and phases are compared. To represent how wellthe phase has been estimated, the modulo 2p differencewith respect to the diffraction-limited image–Fourierphase is displayed. Because the bispectrum is insensi-tive to a shift in the object, a close estimate of the phaseobtained from the bispectral phase can be tilted with re-
spect to the original. Because of the modulo 2p opera-tion, this difference will exhibit the fringe pattern shownin Figs. 6(d)–6(f ) (a perfect phase estimate will be repre-sented either by perfect fringes or by no fringes at all).
6. CONCLUSIONSIn this paper two minimization approaches have beenpresented to recover the desired approximateddiffraction-limited object from the bispectral phase alone. They arebased on the minimization of E2 (phasor differences) butvary the image–Fourier components in one case and theimage itself in the other. These schemes avoid the use ofreference star measurements. Unfortunately, the associ-ated cost functions are expensive to evaluate, given theneed to calculate sine and cosine terms for every combi-nation of image-plane and Fourier-plane coordinates.Stagnation represents a frequent problem, and the mini-mizations need to be restarted. A new initial guess canbe the previously calculated solution (stagnated at a localminimum), but with the positivity and support con-
Pedro Negrete-Regagnon Vol. 15, No. 7 /July 1998 /J. Opt. Soc. Am. A 1795
straints applied to it. Fortunately, the conjugate gradi-ent routine starts with a moderately large step length,and the perturbation given to the solution is often big
enough to move it away from the local minimum andeventually to improve the estimate. The use of thebispectral-phase SNR as a weighting factor increases con-
Fig. 6. Normalized Fourier moduli and modulo 2p phase differences for the reconstructed objects of Fig. 5. The Fourier moduli areassociated with (a) the diffraction-limited image, (b) the reconstructed object with use of the information from a reference star, and (c) theobject recovered from the bispectral phase only. The difference between the Fourier phase associated with the diffraction-limited imageand the phase recovered from the bispectral phase with use of the conventional algorithm is given in (d), and the difference between theFourier phase and the phase estimated with use of the algorithm described in this paper is given in (e). The difference between bothphases is shown in (f ). The telescope diffraction limit is indicated by the circles. The gray scale of (a) applies also to (b) and (c), andthe one in (f ) applies also to (d) and (e).
1796 J. Opt. Soc. Am. A/Vol. 15, No. 7 /July 1998 Pedro Negrete-Regagnon
siderably the probability of finding the right solution.The algorithms described in this paper result in good
object reconstructions with the use of low-light-level datafrom a numerically simulated star cluster, but the use ofa reference still provides finer details in the final image.In the case of a simpler object (real photon-limited datafrom a binary object), the resulting image shows no differ-ence when compared with the same reconstruction butone that makes use of reference star measurements.
ACKNOWLEDGMENTSThe author is grateful to R. Q. Fugate and his team atStarfire Optical Range for his collaboration in taking theb Del data. Special thanks go to John Gonglewski andthe personnel at the Imaging Technology Branch of theU.S. Air Force Phillips Laboratory for providing the mul-tiaperture multianode detector. The author thanks J. C.Dainty, who kindly reviewed the early stages of themanuscript, and the anonymous reviewers for their con-structive comments. He also thanks the Consejo Nacio-nal de Ciencia y Tecnologıa and the Centro de Investiga-cion Cientıfica y de Educacion Superior de Ensenada,Mexico, for financial support.
*Address correspondence to the author at CICESE Op-tica, P.O. Box 434944, San Diego, California 92143-4944.Telephone, 011-52-61-744501; fax, 011-52-61-750549; e-mail, [email protected]. Present address, Departa-mento de Optica, Division de Fısica Aplicada, Centro deInvestigacion Cientıfica y de Educacion Superior deEnsenada, Apartado Postal 2732, Ensenada, Baja Califor-nia, Mexico.
REFERENCES1. G. R. Ayers and J. C. Dainty, ‘‘Iterative blind deconvolution
method and its applications,’’ Opt. Lett. 13, 547–549 (1988).2. R. G. Lane, ‘‘Blind deconvolution of speckle images,’’ J. Opt.
Soc. Am. A 9, 1508–1514 (1992).3. J. C. Christou, E. K. Hege, and S. M. Jefferies, ‘‘Multiframe
blind deconvolution for object and PSF recovery for astro-nomical imaging,’’ in Signal Recovery and Synthesis, Vol. 11of 1995 OSA Technical Digest Series (Optical Society ofAmerica, Washington, D.C., 1995), pp. 70–73.
4. R. G. Paxman and J. H. Seldin, ‘‘Simulation validation ofphase-diverse speckle imaging,’’ in Signal Recovery andSynthesis, Vol. 11 of 1995 OSA Technical Digest Series (Op-tical Society of America, Washington, D.C., 1995), pp. 85–87.
5. G. Weigelt, ‘‘Triple-correlation imaging in optical as-tronomy,’’ in Progress in Optics, E. Wolf, ed. (Elsevier, Am-sterdam, 1991), Vol. XXIX, pp. 293–319.
6. J.-Y. Zhang and J. C. Dainty, ‘‘Effects of aberrations ontransfer functions used in high angular resolution astro-nomical imaging,’’ J. Mod. Opt. 39, 2383–2404 (1992).
7. P. Negrete-Regagnon, ‘‘Phase recovery from the bispectrumaided by the error-reduction algorithm,’’ Opt. Lett. 21, 275–277 (1996).
8. A. Glindemann and J. C. Dainty, ‘‘Object fitting to thebispectral phase using least squares,’’ J. Opt. Soc. Am. A10, 1056–1063 (1993).
9. P. Negrete-Regagnon, ‘‘Practical aspects of image recoveryby means of the bispectrum,’’ J. Opt. Soc. Am. A 13, 1557–1576 (1996).
10. K. T. Knox and B. J. Thompson, ‘‘Recovery of images fromatmospherically degraded short-exposure photographs,’’ As-trophys. J., Lett. Ed. 193, L45–L48 (1974).
11. A. W. Lohmann, G. Weigelt, and B. Wirnitzer, ‘‘Specklemasking in astronomy: triple correlation theory and appli-cations,’’ Appl. Opt. 22, 4028–4037 (1983).
12. A. W. Lohmann and B. Wirnitzer, ‘‘Triple correlations,’’Proc. IEEE 72, 889–901 (1984).
13. G. R. Ayers, M. J. Northcott, and J. C. Dainty, ‘‘Knox–Thompson and triple-correlation imaging through atmo-spheric turbulence,’’ J. Opt. Soc. Am. A 5, 963–985 (1988).
14. J. C. Dainty, ‘‘Stellar speckle interferometry,’’ in LaserSpeckle and Related Phenomena, 2nd ed., J. C. Dainty, ed.(Springer-Verlag, Berlin, 1984), p. 260.
15. B. Wirnitzer, ‘‘Bispectral analysis at low light levels and as-tronomical speckle masking,’’ J. Opt. Soc. Am. A 2, 14–21(1985).
16. NAG Fortran Library Manual, Mark 14, Chapter E04, Rou-tine E04DGF. The NAG Fortran Library is available fromNAG Inc., 1400 Opus Place, Suite 200, Downers Grove,Illinois 60515-5702.
17. E. Thiebaut and J.-M. Conan, ‘‘Strict a priori constraintsfor maximum-likelihood blind deconvolution,’’ J. Opt. Soc.Am. A 12, 485–492 (1995).