IN DEGREE PROJECT ELECTRICAL ENGINEERING, SECOND CYCLE, 30 CREDITS , STOCKHOLM SWEDEN 2016 Optimization of a Vanadium Redox Flow Battery with Hydrogen generation DANIEL WRANG KTH ROYAL INSTITUTE OF TECHNOLOGY SCHOOL OF ELECTRICAL ENGINEERING
Transcript
IN DEGREE PROJECT ELECTRICAL ENGINEERING, SECOND CYCLE, 30 CREDITS
, STOCKHOLM SWEDEN 2016
Optimization of a Vanadium Redox Flow Battery with Hydrogen generation
DANIEL WRANG
KTH ROYAL INSTITUTE OF TECHNOLOGYSCHOOL OF ELECTRICAL ENGINEERING
AcknowledgementsI would like to thank my supervisor Dr. Timm Faulwasser and co supervisor Dr. Julien
Billeter at EPFL for inviting me to work with them and for their input and support during
the development of this thesis. I would also like to express my gratitude to Prof. Dominique
Bonvin, EPFL, for hosting me at the Laboratoire d’Automatique at EPFL. I would like to
thank Dr. Véronique Amstutz, Dr. Alberto Batisel and Dr. Heron Vrubel, at EPFL for helping
with development of the electrochemical aspects of the battery model. I am thankful to my
examiner Prof. Mikeal Johansson, KTH.
i
AbstractWe consider the modelling and optimal control of energy storage systems, in this study a
Vanadium Redox Flow Battery. Such a battery can be introduced in the electrical grid to be
charged when demand is low and discharged when demand is high, increasing the overall
efficiency of the network while reducing costs and emission of greenhouse gases. The model
of the battery proposed in this study is less complex than the majority of models on batteries
and energy storage systems found in literature, but still accurate enough to capture the core
aspects of the behaviour of the battery. Estimation methods are discussed for determining
unknown parameters in the model using experimental data and the model is evaluated against
additional measurements of the physical system showing good fit. The purpose of having a
simple model is that the resulting optimal control problem is easier to solve. Operation of the
battery with respect to several different objectives are discussed and that of minimizing the
vertical net load and maximizing profit are solved for open loop control and receding horizon
control over the time span of one day. Two performance metrics are proposed for determining
the gain of operating an electrical network with or without the battery. The results show that
the introduction of storage systems indeed helps in increasing profit and reducing emissions.
where F is the Faraday constant, x is the SOC in the interval [0, 100] and
c2(x) = x ·k10
100(3.15)
c3(x) = k10 − c2(x) (3.16)
15
Chapter 3. Modeling
and similarly
c5(x) = x ·k10
100(3.17)
c4(x) = k10 − c5(x) (3.18)
where c2(x), c3(x), c4(x) and c5(x) are the concentrations of the respective vanadium species.
Model of the complete battery
Due to the cells and stack arrangement the current of the battery is
z1 = ibat ter y = 3 · icel l
and the voltage as
Eapp (x, z) = 40 ·Eapp,cel l (x, z)
The power of the battery is
z4 = z1 ·Eapp (x, z)
From these additional equations the DAE for the entire battery becomes (3.19)-(3.22)
x = k0 · z1 (3.19)
0 = z1 − z4
Eapp (x, z)(3.20)
0 =−z1 −3 ·k6(x)
(exp
(k2α2(x, z2)
)−exp(k3α2(x, z2)
))(3.21)
0 = z1 −3 ·k7(x)
(exp
(k4α3(x, z3)
)−exp(k5α3(x, z3)
))(3.22)
with the same notation as previously. The system needs to be solved for the variables
(x, z1, z2, z3, z4). However, there are only four equations, but by considering the battery in
either constant power or in constant voltage mode, one more algebraic equation is introduced.
Power driven mode
During constant power mode, the DAE can be complemented by
0 = u − z4 (3.23)
where u is the manipulated variable. However, if the system reaches one of the battery
threshold voltages the battery switches to constant voltage mode. During normal operation
16
3.2. Battery model
the battery will be operated in constant power mode.
Constant voltage mode
During the charge the voltage in the battery increases until the voltage level hits a threshold of
63 (V) when the battery switches to constant voltage mode. Similarly, during the discharge the
voltage decreases until the voltage reaches a threshold of 42 (V) when the battery switches
to constant voltage mode. Let Vconst be the constant voltage value, either 63 or 42, then the
following equation can be added to the DAE
0 =Vconst −Eapp (x, z) (3.24)
where Vconst is the upper or lower limit.
Parameters
To simplify and generalize the notation of the system model, the following parameters k0, . . . ,k5
and k8 . . .k10 are defined
k0 = 100ηC
CN
k1 = RT
F
k2 = α32n32
k1
k3 = −(1−α32)n32
k1
k4 = α54n54
k1
k5 = −(1−α54)n54
k1
k8 = E 0′32
k9 = E 0′54
k10 = aV tot
the meaning of the parameters on the right hand side of the equaltiy signs can be found at the
end of this chapter.
17
Chapter 3. Modeling
3.3 Full model
The model of the VRFB previously discussed is presented here in its full extent. It may be
expressed by equation (3.25) using equation (3.26)-(3.28), with F (x, x, z,u) = 0
F (x, x, z,u) =(
x − f (x, z,u)
g (x, z,u)
)(3.25)
where
f (x, z,u) = k0z1 (3.26)
g (x, z,u) =
z1 − z4
Eapp (x,z)
−z1 −3 ·k6(x)(exp(k2α2(x, z2))−exp
(k3α2(x, z2)))
z1 −3 ·k7(x)(exp(k4α3(x, z3))−exp
(k5α3(x, z3)))
g4(x, z,u)
(3.27)
with
g4(x, z) =u − z4 if constant power mode
Vconst −Eapp (x, z) if constant voltage mode(3.28)
Measurements of the system
The outputs of the VRFB that are measured are the state of charge, current, voltage and power
defined by
y = h(x, z,u) =
x
z1
Eapp (x, z)
z4
(3.29)
The electrode potentials z2 and z3 are typically not available as measurments. However, it is
physically possible to measure them, but it requires additional equipment. The VRFB can be
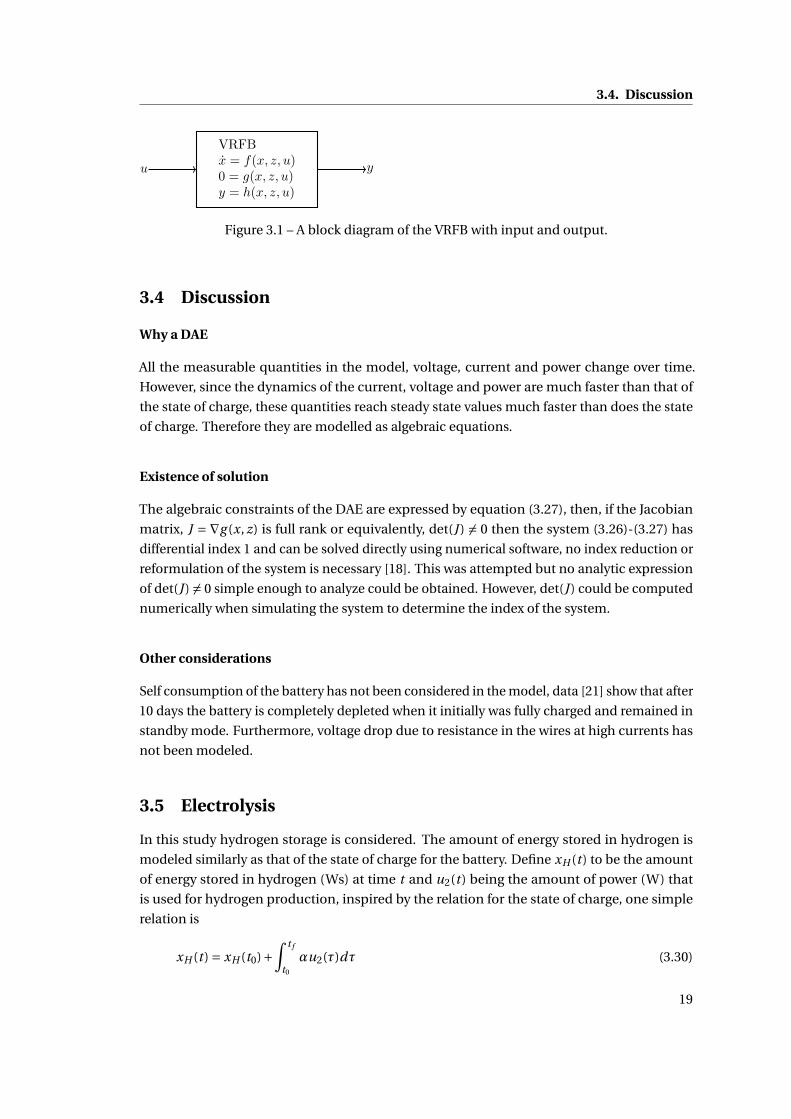
represented with the block diagram in figure 3.1.
18
3.4. Discussion
VRFBx = f(x, z, u)0 = g(x, z, u)y = h(x, z, u)
u y
Figure 3.1 – A block diagram of the VRFB with input and output.
3.4 Discussion
Why a DAE
All the measurable quantities in the model, voltage, current and power change over time.
However, since the dynamics of the current, voltage and power are much faster than that of
the state of charge, these quantities reach steady state values much faster than does the state
of charge. Therefore they are modelled as algebraic equations.
Existence of solution
The algebraic constraints of the DAE are expressed by equation (3.27), then, if the Jacobian
matrix, J = ∇g (x, z) is full rank or equivalently, det(J) 6= 0 then the system (3.26)-(3.27) has
differential index 1 and can be solved directly using numerical software, no index reduction or
reformulation of the system is necessary [18]. This was attempted but no analytic expression
of det(J ) 6= 0 simple enough to analyze could be obtained. However, det(J ) could be computed
numerically when simulating the system to determine the index of the system.
Other considerations
Self consumption of the battery has not been considered in the model, data [21] show that after
10 days the battery is completely depleted when it initially was fully charged and remained in
standby mode. Furthermore, voltage drop due to resistance in the wires at high currents has
not been modeled.
3.5 Electrolysis
In this study hydrogen storage is considered. The amount of energy stored in hydrogen is
modeled similarly as that of the state of charge for the battery. Define xH (t ) to be the amount
of energy stored in hydrogen (Ws) at time t and u2(t) being the amount of power (W) that
is used for hydrogen production, inspired by the relation for the state of charge, one simple
relation is
xH (t ) = xH (t0)+∫ t f
t0
αu2(τ)dτ (3.30)
19
Chapter 3. Modeling
from which we get the differential equation
xH (t ) =αu2(t ), xH (t0) is known (3.31)
whereα is a dimensionless efficiency factor, for this model it was set toα= 0.5. For the present
study we assume that the storage capacity of hydrogen is infinite, thus there is no restriction
on how much hydrogen can be stored.
3.6 Parameters
The parameters appearing in the model are presented. Some parameters are known from the
literature whereas others are dependent on the physical system and have to be determined
experimentally.
Constants
The values listed in Table 3.1 are physical constants related to the system that do not need to
be identified. They were either obtained from literature or from general information about the
particular battery under study.
Parameter Value Unit DescriptionR 8.314 J mol−1 K−1 Ideal gas constantT 298 K Absolute temperatureF 96485 C mol−1 Faraday constant
n32 1 - Number of electrons in half reaction for V (I I )/V (I I I )n54 1 - Number of electrons in half reaction for V (IV )/V (V )E 0′
32 -0.207 V Standard reduction potentialE 0′
54 1.18 V Standard reduction potentialaV tot 1.6 - Total activity
Table 3.1 – Constants.
R , T and F are standard physical constants found in the literature, n32 and n54 are the number
of electrons that are exchanged in each half reaction of the battery. It can be identified from
chemical equations (2.1)-(2.4). As can be seen, only one electron is taking part in each reaction
and therefore n32 = n54 = 1. These parameters are clearly the same for all batteries of the
vanadium type. The standard reduction potentials E 0′32 and E 0′
54 can be found in literature. The
total vanadium activity aV tot represents the total concentration of vanadium in the tanks and
was provided by the operator of the battery.
20
3.6. Parameters
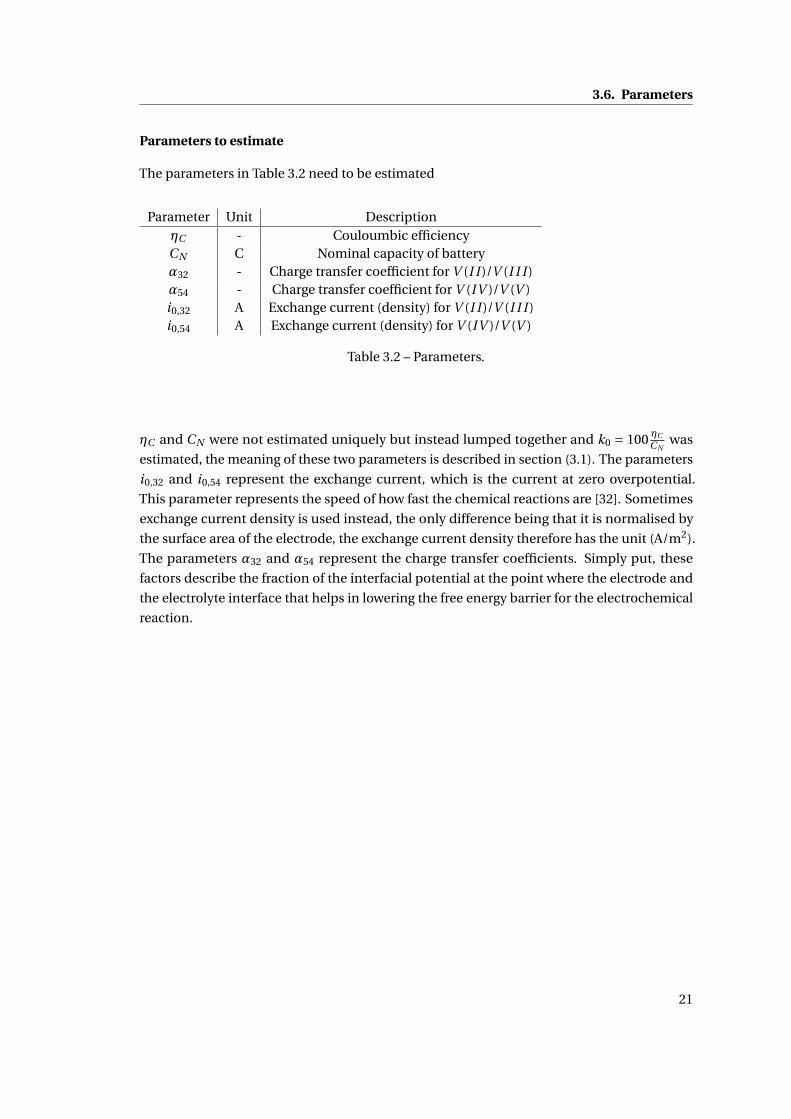
Parameters to estimate
The parameters in Table 3.2 need to be estimated
Parameter Unit DescriptionηC - Couloumbic efficiencyCN C Nominal capacity of batteryα32 - Charge transfer coefficient for V (I I )/V (I I I )α54 - Charge transfer coefficient for V (IV )/V (V )i0,32 A Exchange current (density) for V (I I )/V (I I I )i0,54 A Exchange current (density) for V (IV )/V (V )
Table 3.2 – Parameters.
ηC and CN were not estimated uniquely but instead lumped together and k0 = 100 ηC
CNwas
estimated, the meaning of these two parameters is described in section (3.1). The parameters
i0,32 and i0,54 represent the exchange current, which is the current at zero overpotential.
This parameter represents the speed of how fast the chemical reactions are [32]. Sometimes
exchange current density is used instead, the only difference being that it is normalised by
the surface area of the electrode, the exchange current density therefore has the unit (A/m2).
The parameters α32 and α54 represent the charge transfer coefficients. Simply put, these
factors describe the fraction of the interfacial potential at the point where the electrode and
the electrolyte interface that helps in lowering the free energy barrier for the electrochemical
reaction.
21
4 Parameter estimation and validation
4.1 Methods
The estimation problem is the following. Given a set of measurements for a system, a model
F (t , x, x, z,u, p) with measurable output ymodel (t , p) find the parameters p that solves the
following problem
minimizep
n∑i=1
||ymeasur ed (ti )− ymodel (p)||2Q
subject to p ∈P
(4.1)
where Q is a positive definite weighting matrix, P is the feasible set and ti ∈ [t0, t f ] is the time.
Furthermore
ymodel (p) = h(x, z,u, p) (4.2)
is the output of the model for the system. It is assumed that the input signal u is known over
[t0, t f ] and ymeasur ed (ti ) is given data also known over [t0, t f ].
4.1.1 Linear estimates
In the special case where the parameter is scalar and appears linearly in the equations and the
domain P is unbounded, then P =R and the estimate can be written explicitly [23]. Assume
the unknown scalar parameter p is involved in an equation of the form
yi = p · xi (4.3)
23
Chapter 4. Parameter estimation and validation
where measurements y = (y1, . . . , yn) and x = (x1, . . . , xn) are available. The estimate p of p can
be found by first setting up the overdetermined linear system of equationsx1...
xn
︸ ︷︷ ︸
=:A
p =
y1...
yn
︸ ︷︷ ︸
=:b
(4.4)
Then the estimate is found by forming the normal equations, i.e. by left multiplying both sides
with AT yielding
ATA ·p = ATb (4.5)
Finally the estimate is found to be
p = (ATA)−1 ATb (4.6)
from the least squares method.
4.1.2 Estimation for a DAE system
The case where parameters appearing in a nonlinear DAE model need to be estimated is
discussed. The estimation problem will be rewritten as an optimization problem and a
numerical optimization solver will be used. For the optimization solver it will be required
to provide a function that computes the objective function value. The optimization solver
requires an initial guess of p. Due to the nonlinearity of the system, the optimal p obtained
may depend on the initial guess since the optimization problem is not convex. Let p be the
vector of parameters to be estimated. Also, define a set P which the parameters p belong to.
Let q(p) be the objective function value for a certain parameter set. Let the nonlinear DAE be
expressed by F (x, x, z,u, p) = 0 with u known. Then, the estimation problem is the following
optimization problem
minimizep
∑k∈K
wk (n∑
i=1||y (k)
measur ed (ti )− ymodel (u(k), p)||22)︸ ︷︷ ︸=q(p)
subject to F (x, x, z,u, p) = 0
(x(t0), z(t0)) = (x0, z0) given
p ∈P
(4.7)
where, K is the set of data series used for estimation, [t (k)0 , t (k)
f ] is the estimation horizon
for set k, wk is the weight on data series k and u(k) is the known power level. Each time the
objective function value is computed the DAE system F (x, x, z,u) = 0 needs to be solved for
24
4.1. Methods
the time horizon [t0, t f ]. When the DAE has been solved, the output function y = h(x, z,u)
can be computed. This approach is schematically described below.
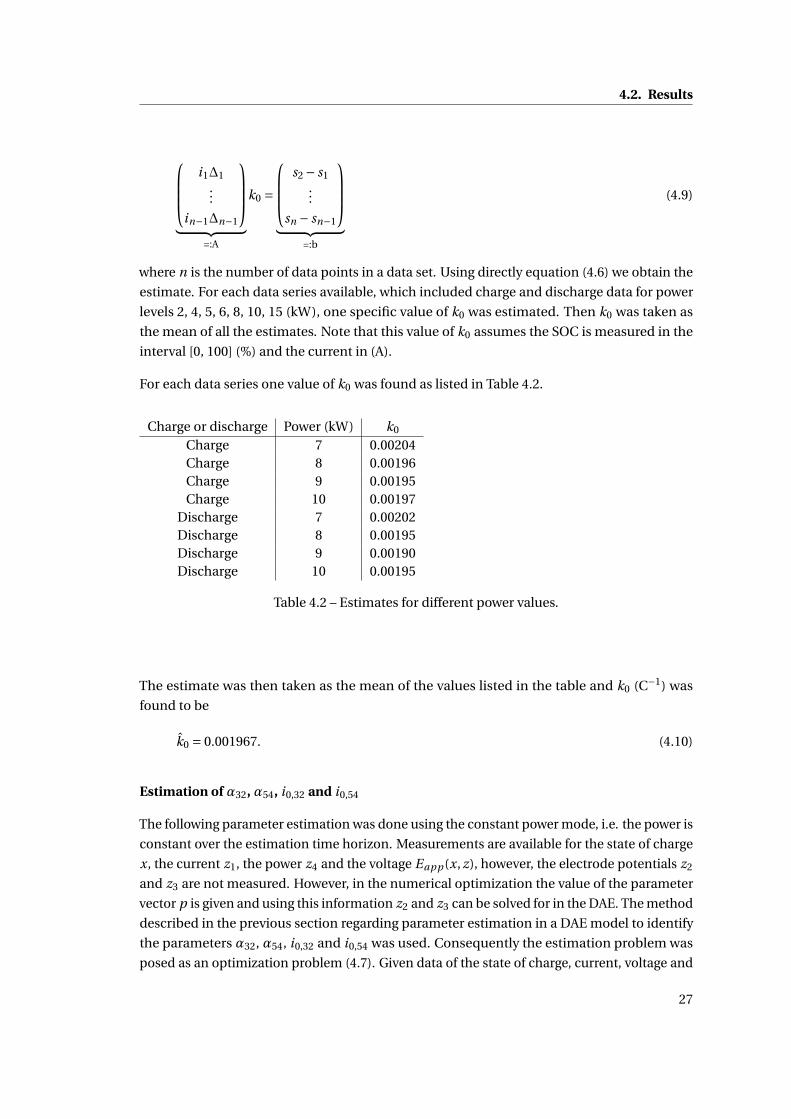
The estimate was then taken as the mean of the values listed in the table and k0 (C−1) was
found to be
k0 = 0.001967. (4.10)
Estimation of α32, α54, i0,32 and i0,54
The following parameter estimation was done using the constant power mode, i.e. the power is
constant over the estimation time horizon. Measurements are available for the state of charge
x, the current z1, the power z4 and the voltage Eapp (x, z), however, the electrode potentials z2
and z3 are not measured. However, in the numerical optimization the value of the parameter
vector p is given and using this information z2 and z3 can be solved for in the DAE. The method
described in the previous section regarding parameter estimation in a DAE model to identify
the parameters α32, α54, i0,32 and i0,54 was used. Consequently the estimation problem was
posed as an optimization problem (4.7). Given data of the state of charge, current, voltage and
27
Chapter 4. Parameter estimation and validation
power over some time interval [t0, t f ] for different power settings for charge and discharge
cycles the parameters were estimated. Define p,
p = (α32,α32, i0,32, i0,54)
to be the vector of parameters. The objective function f (p) was set to
q(p) = ∑k∈K
wk (n∑
i=1||E (k)
appmeasur ed(ti )−Eappmodel
(u(k), p)||22) (4.11)
so the output voltage is taken into account in the objective function and the other measurable
quantities, i.e. state of charge and current are not used. Note that since the power is set to a
fixed value and the SOC is directly related to the current and the initial SOC is known, as long
as the voltage is correct then the current will follow and thus also the SOC. We then define the
feasible set P to be chosen so that α32 and α54 are restricted to the interval [ε, 1−ε] and i0,32
and i0,54 are restricted to the interval [ε, 100], with ε= 10−3. We note that from literature [32] it
must hold that α32 ∈ [0,1] and α54 ∈ [0,1].
Initial results showed very high correlations between the parameters. Thus it was decided
to fix α32 and α54 to the values that were obtained when estimating all four parameters and
then only perform the estimation procedure with two free parameters. Internal experiments
suggest a value for α32 close to what was obtained here, whereas the experimental value of α54
is more uncertain [27]. In fact, it is often possible to approximate the parameters α54 and α54
by setting them to 0.5 [32]. The following parameter values listed in Table 4.3, with standard
deviations were obtained and later used in simulating the system.
Parameter Value Standard deviation Unit Descriptionα32 0.144 - - Charge transfer coefficient for V (I I I )/V (I I )α54 0.544 - - Charge transfer coefficient for V (V )/V (IV )i0,32 0.2555 0.00479 A Exchange current (density) for V (I I I )/V (I I )i0,54 0.000304 7.11·10−7 A Exchange current (density) for V (V )/V (IV )
Table 4.3 – Sample data of measurements from the battery.
The correlations between the parameters as obtained from the optimization are listed in Table
4.4.
i0,32 i0,54
i0,32 1 -0.238i0,54 -0.238 1
Table 4.4 – Sample data of measurements from the battery.
28
4.3. Model validation
The cross correlation (which is in the interval [-1, 1]) is close enough to 0 (zero) to suggest that
it is acceptable to fit two parameters for this model.
4.3 Model validation
Additional experimental data, not the same data that were previously used for identification,
were provided and the model was evaluated against the data. The strongest verification of the
prediction power of the model is obtained when comparing the model to additional data that
had not been used for estimation purposes. The results of this validation are presented here.
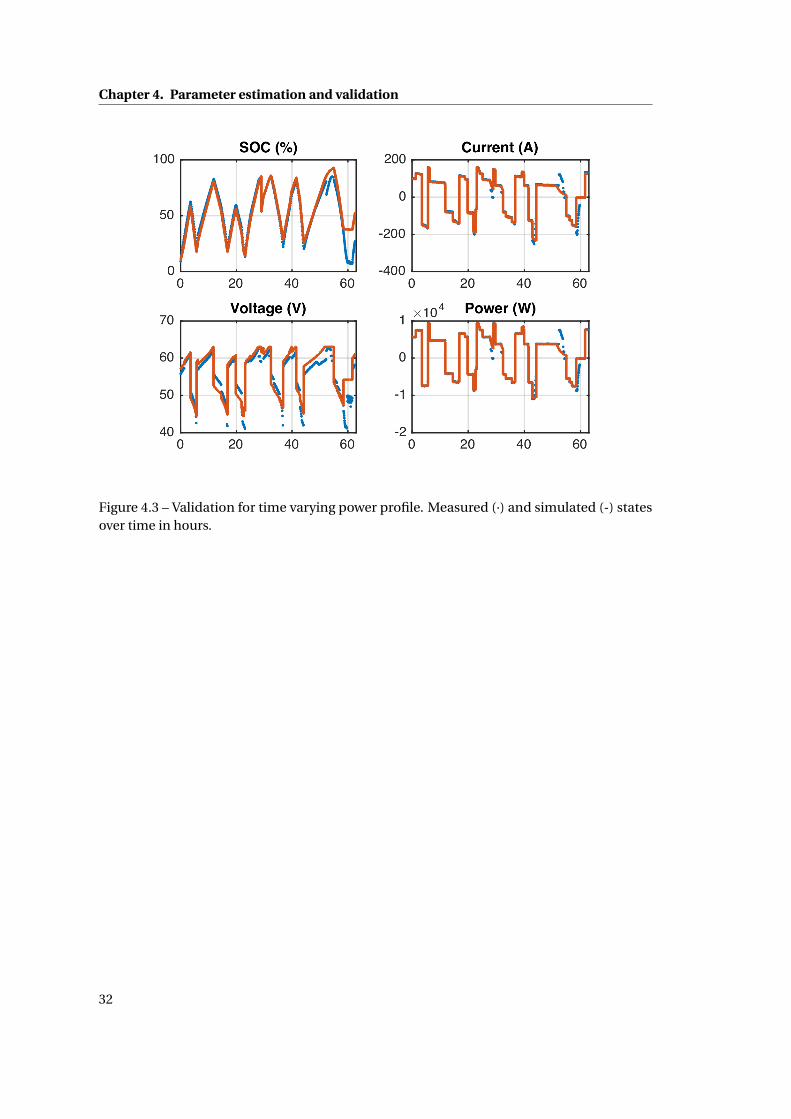
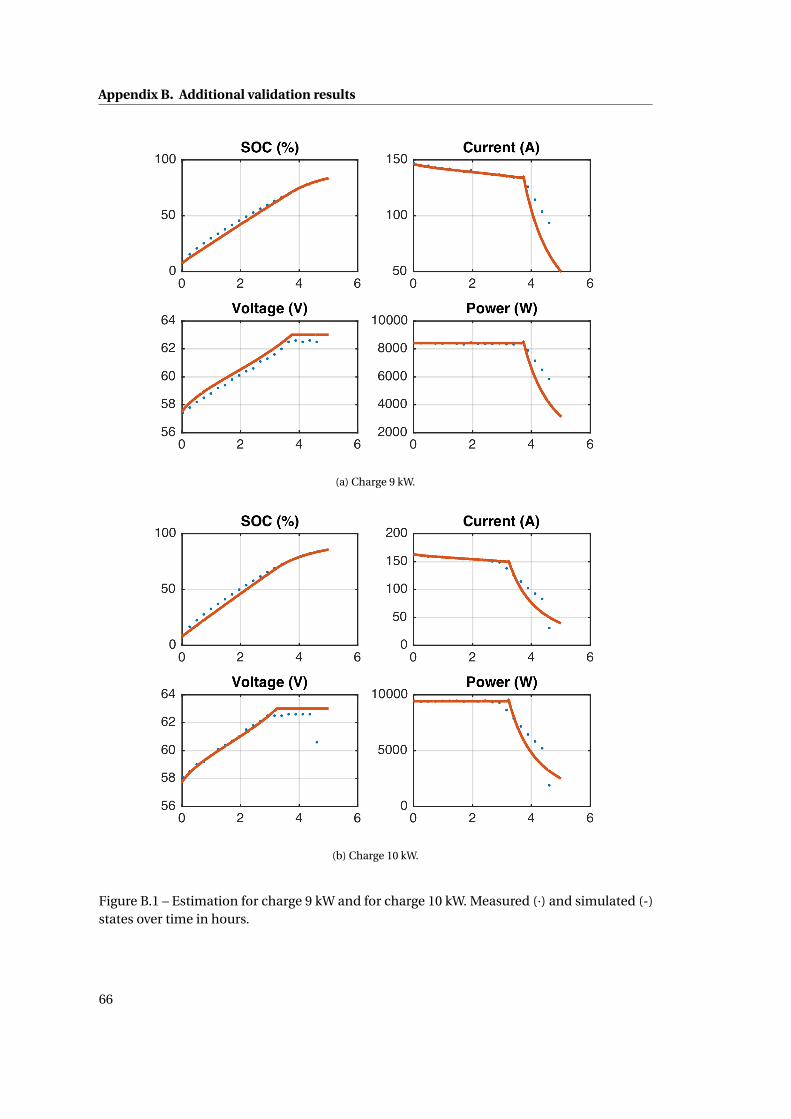
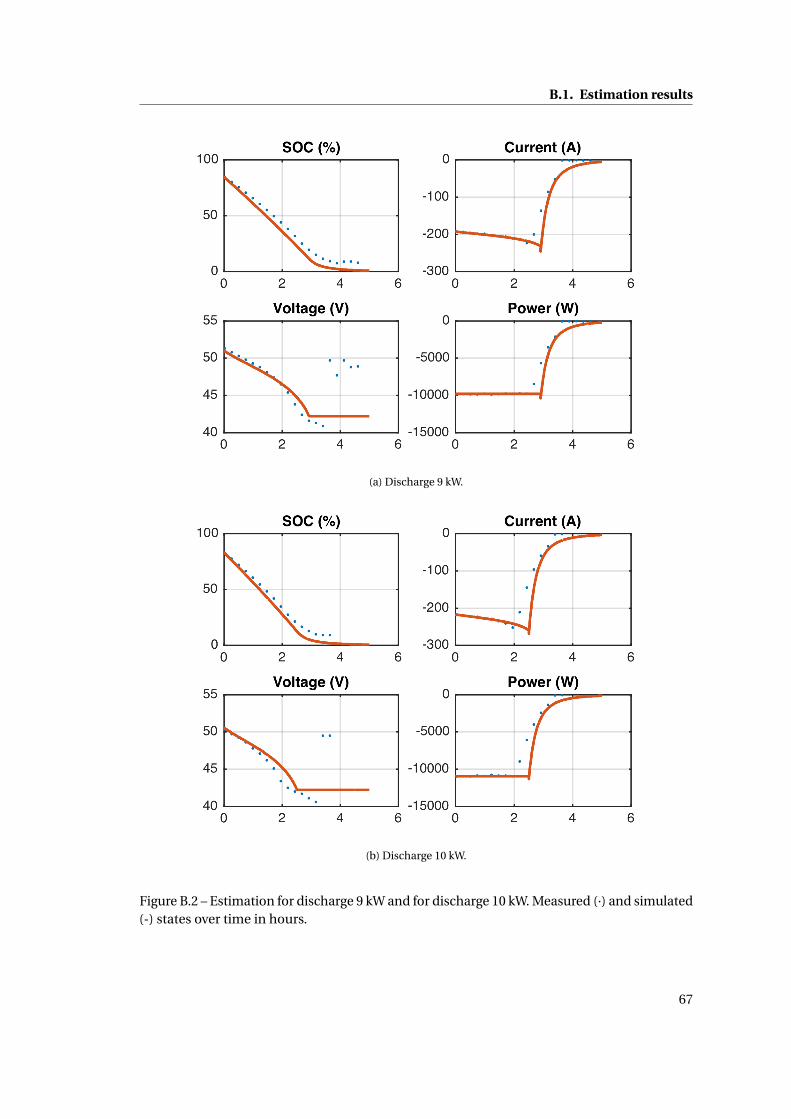
Validation results
The simulated model is evaluated against data that were not used to estimate the parameters.
In the optimal control strategy of the battery, the power is expected to change frequently, the
time varying power profile shows good fit between data and model.
Discussion
In conclusion it seems the predictions of the state of charge are reasonable, whereas the
predictions on voltage are sometimes off with a few volts, about 0-3 (V). It is important to
keep in mind that when the voltage hits the thresholds the regime of the battery changes and
the current model is not always capable of predicting that switch on time. We also note that
restriciting ourselves to only having one set of parameters that are the same for all power
levels and for both charge and discharge reduces the overall accuracy of the model. The time
varying power profile shows good fit and when optimizing the battery operation mode it is
expected that the power will change freqeuently showing a similar trend as the time varying
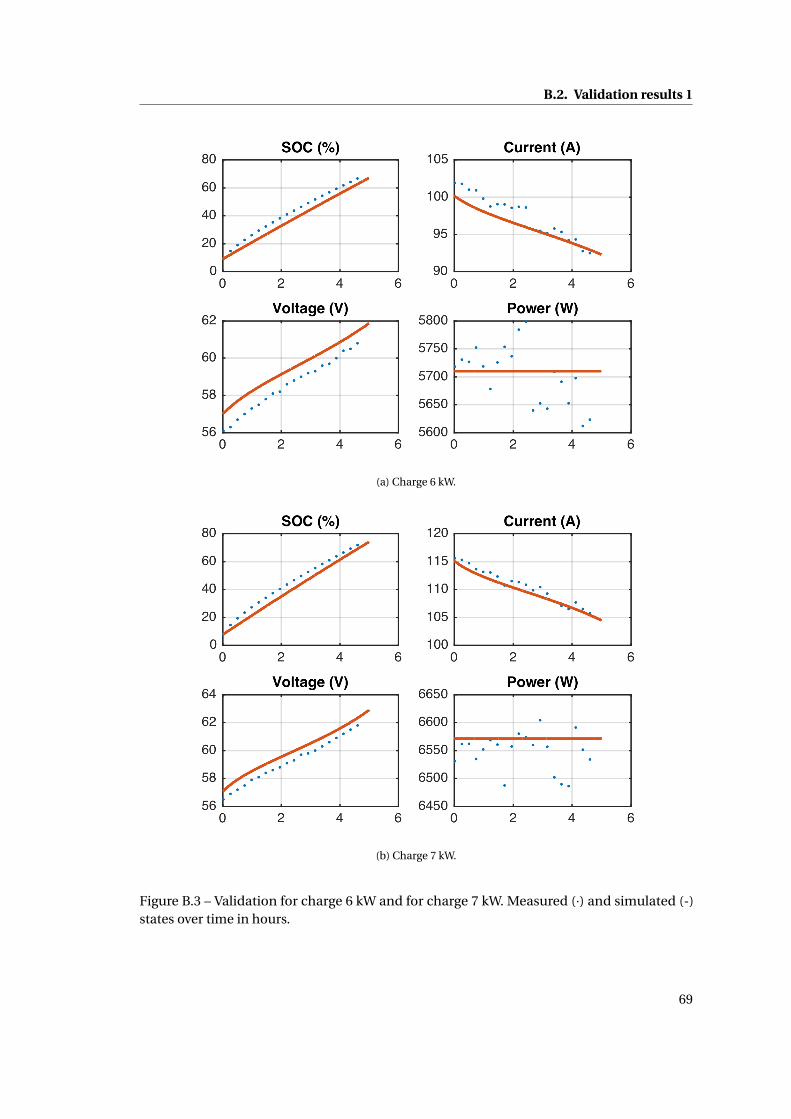
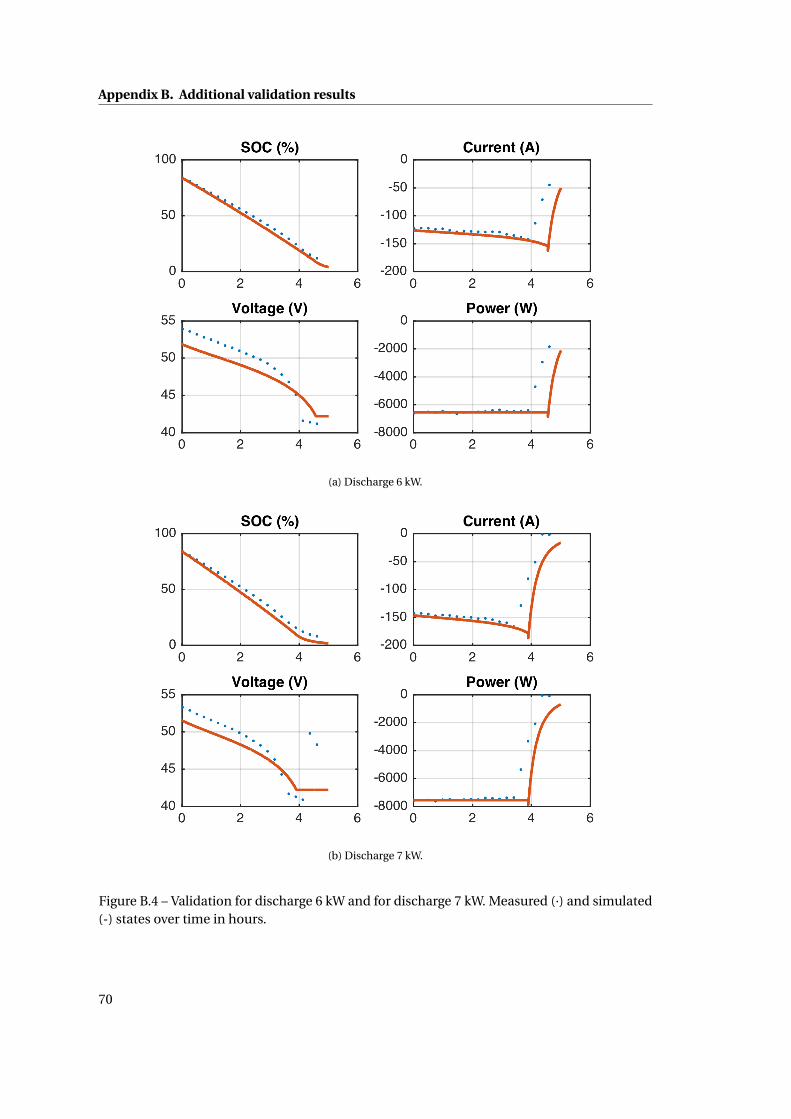
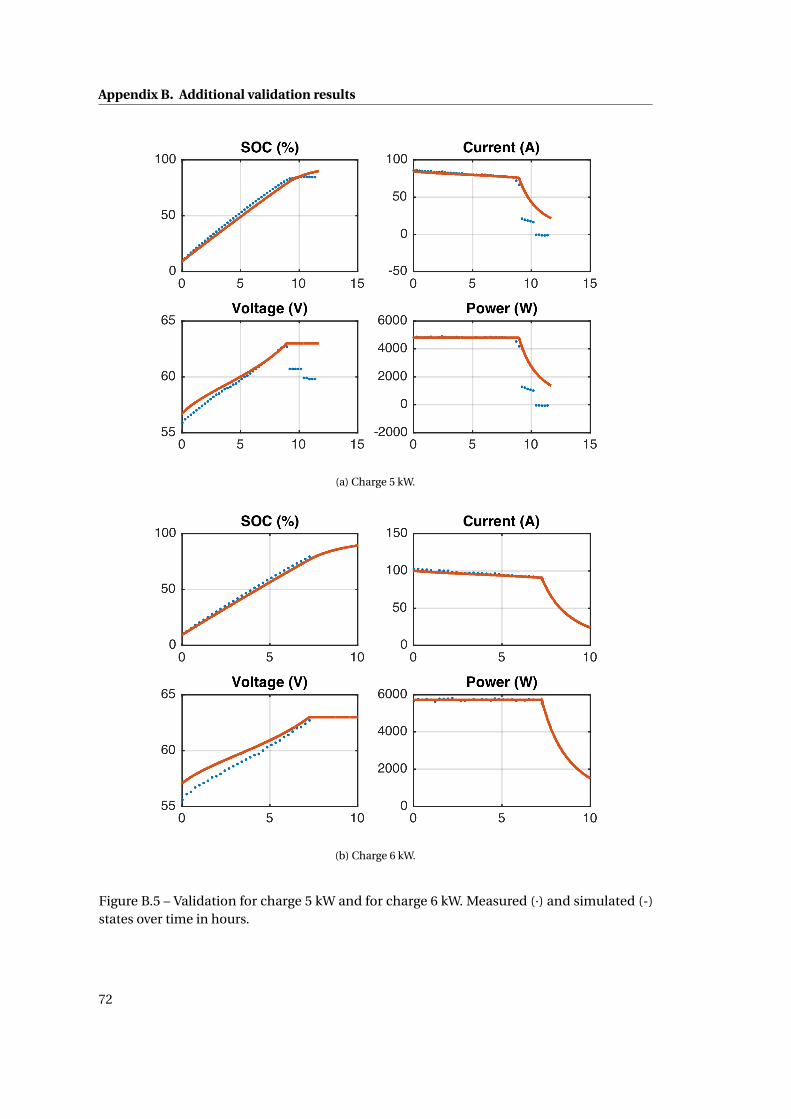
power profile, thus it seems the model is good enough. Additional validation results are listed
in the appendix without a discussion.
29
Chapter 4. Parameter estimation and validation
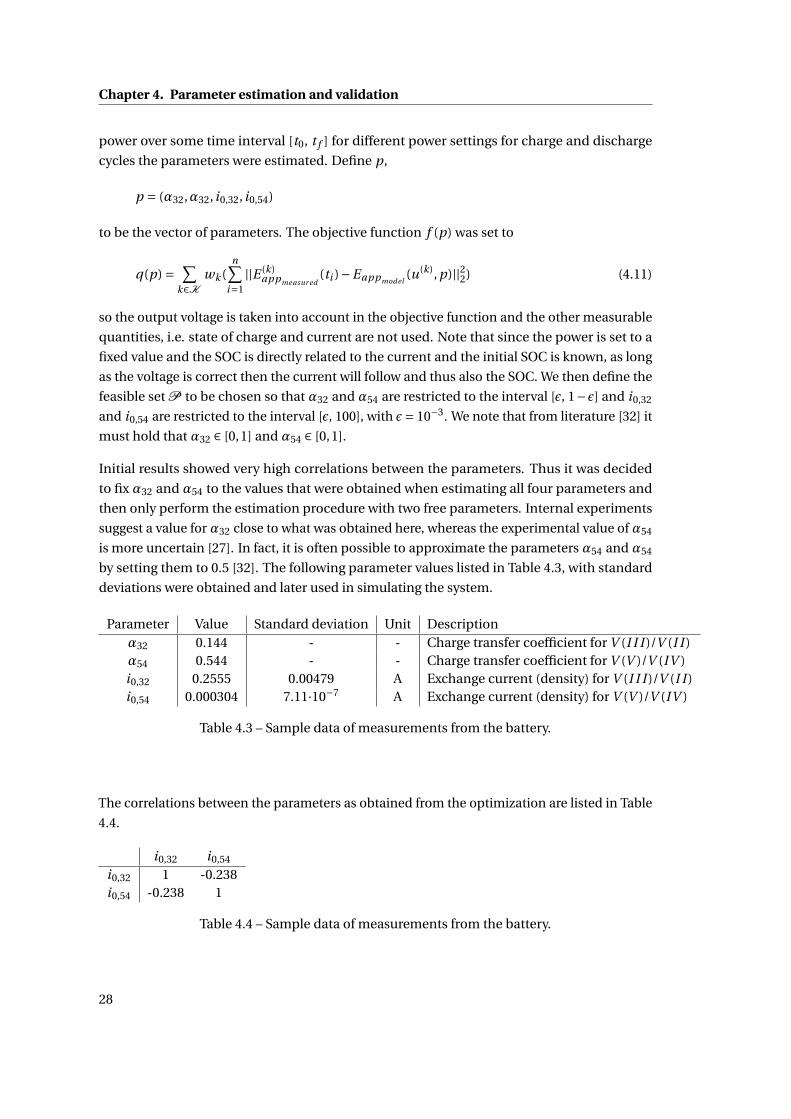
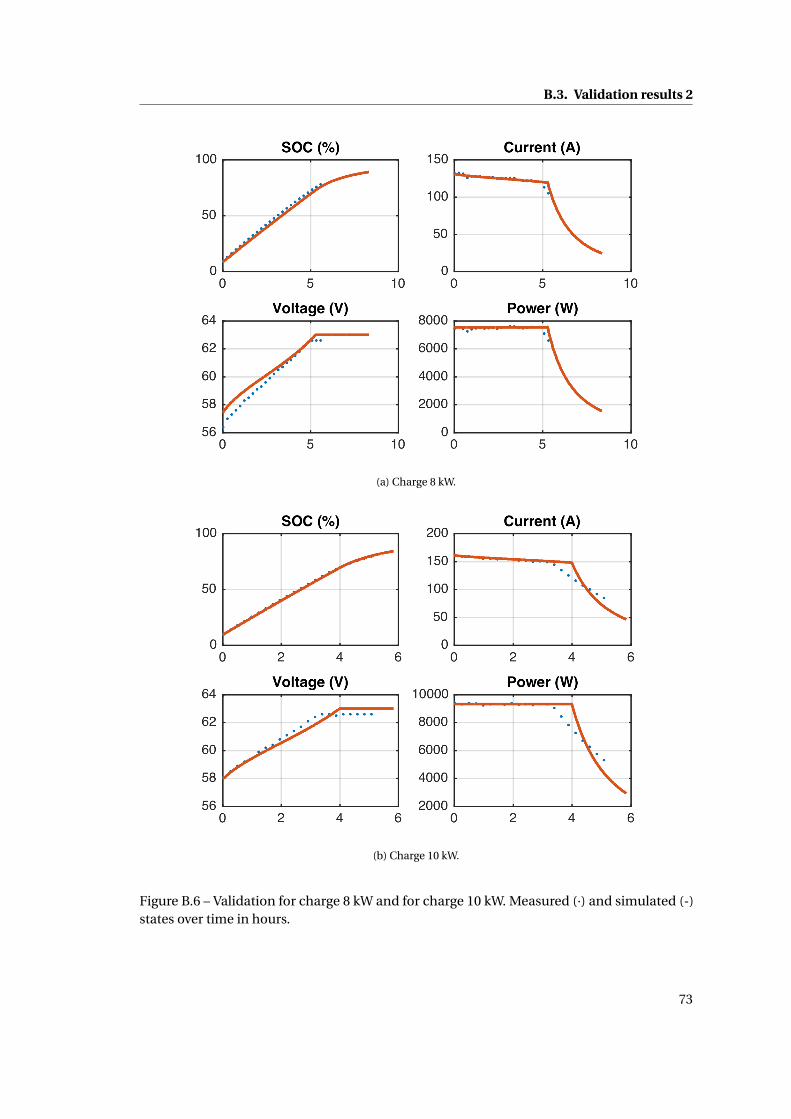
(a) Charge 8 kW.
(b) Charge 10 kW.
Figure 4.1 – Validation for charge 8 kW and for charge 10 kW. Measured (·) and simulated (-)states over time in hours.
30
4.3. Model validation
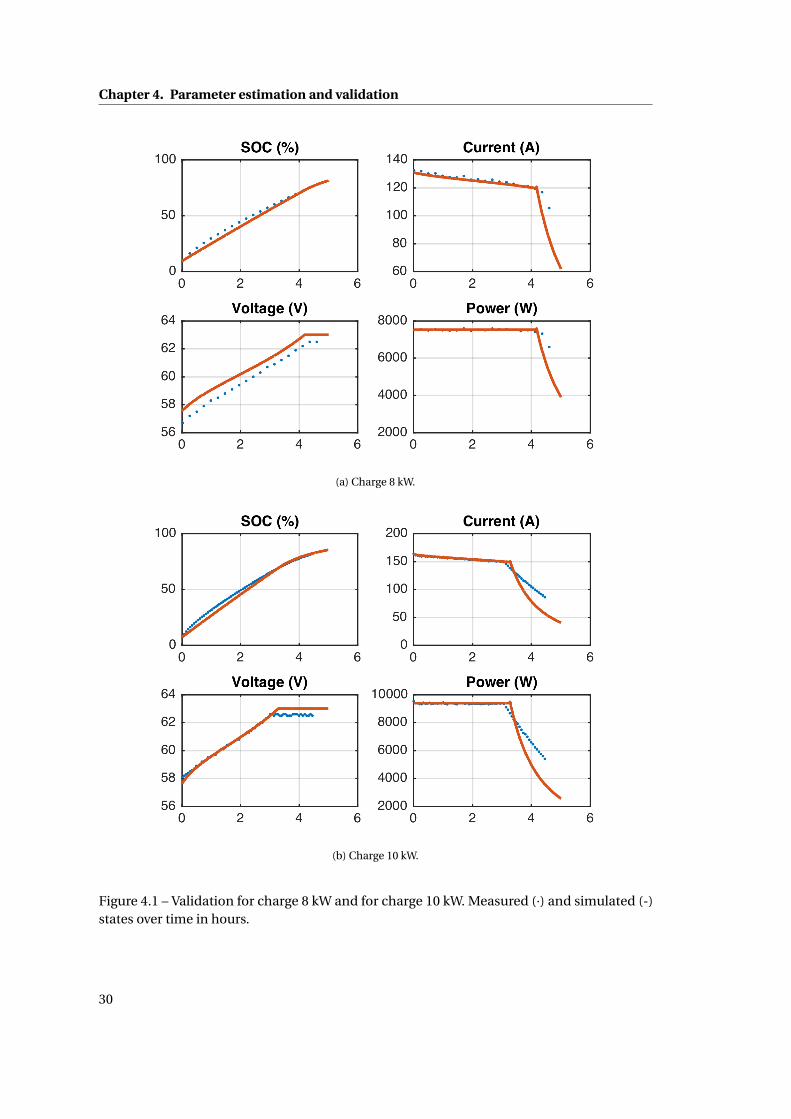
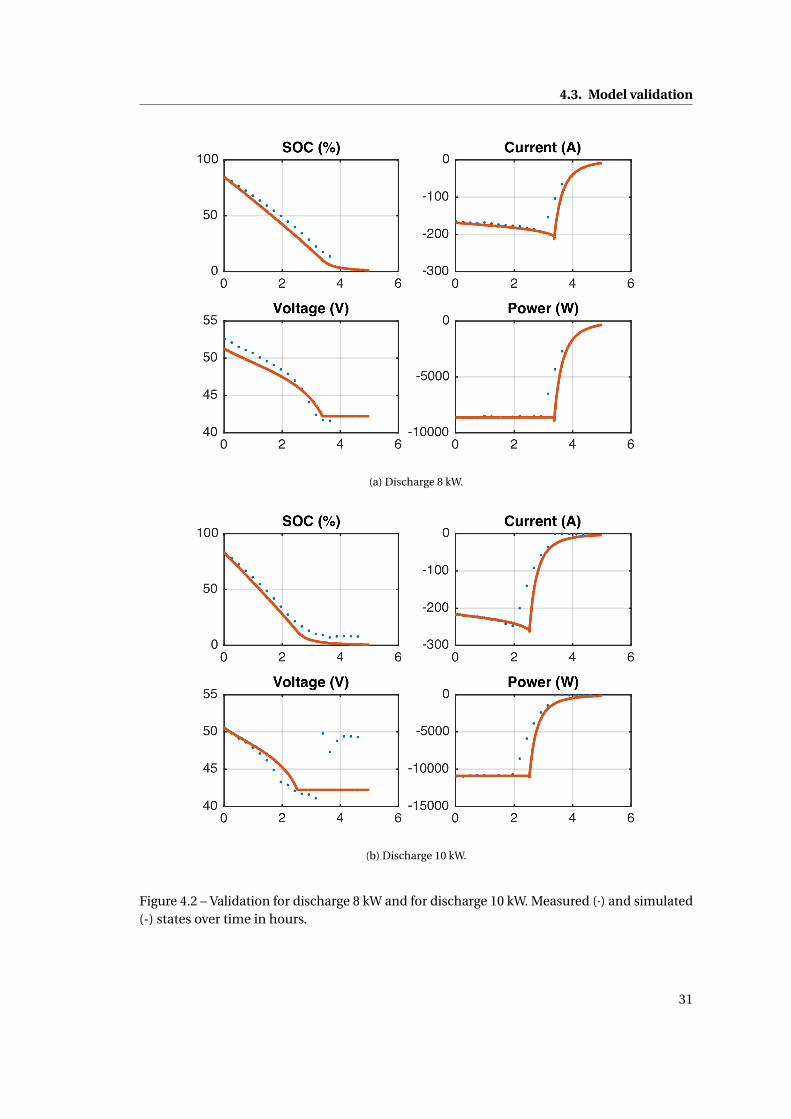
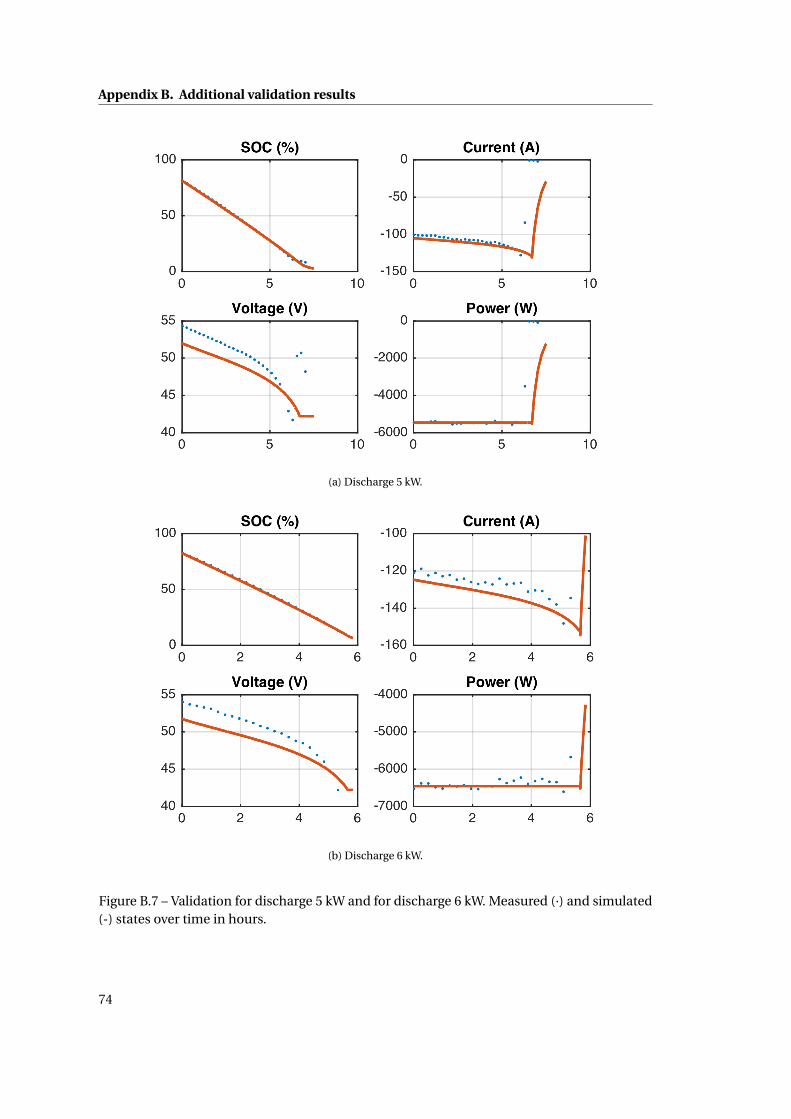
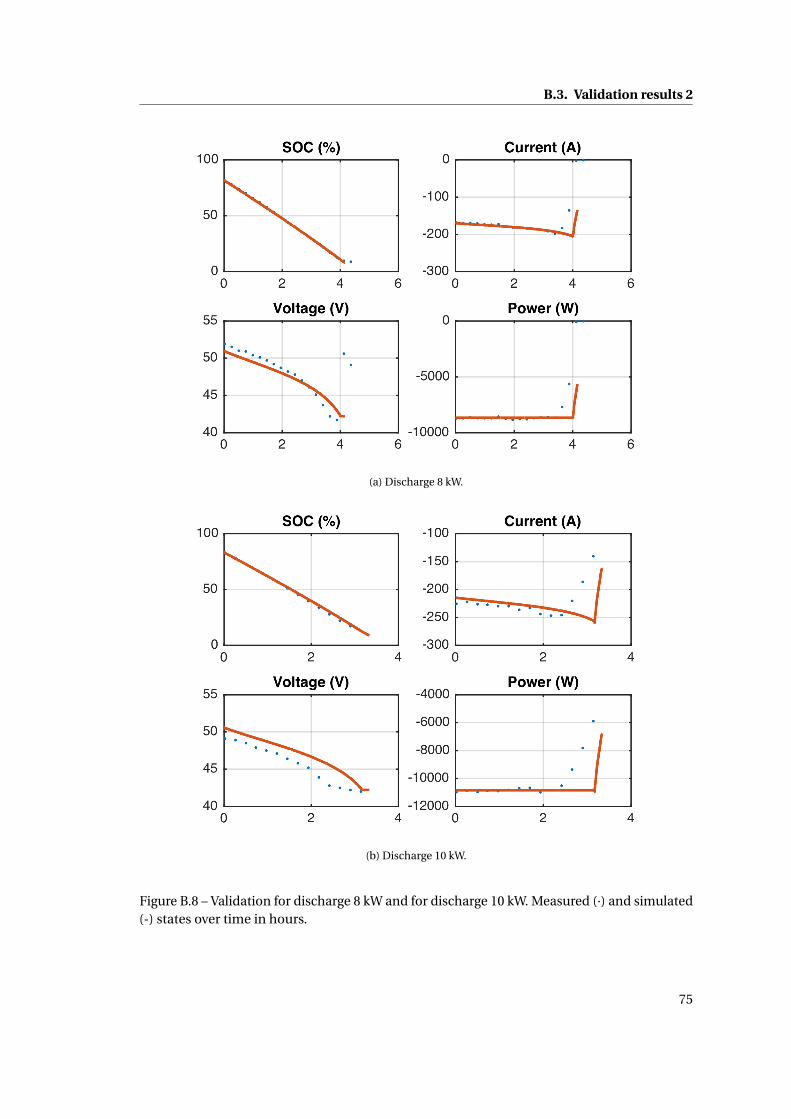
(a) Discharge 8 kW.
(b) Discharge 10 kW.
Figure 4.2 – Validation for discharge 8 kW and for discharge 10 kW. Measured (·) and simulated(-) states over time in hours.
31
Chapter 4. Parameter estimation and validation
Figure 4.3 – Validation for time varying power profile. Measured (·) and simulated (-) statesover time in hours.
32
5 Optimization
5.1 The electrical network
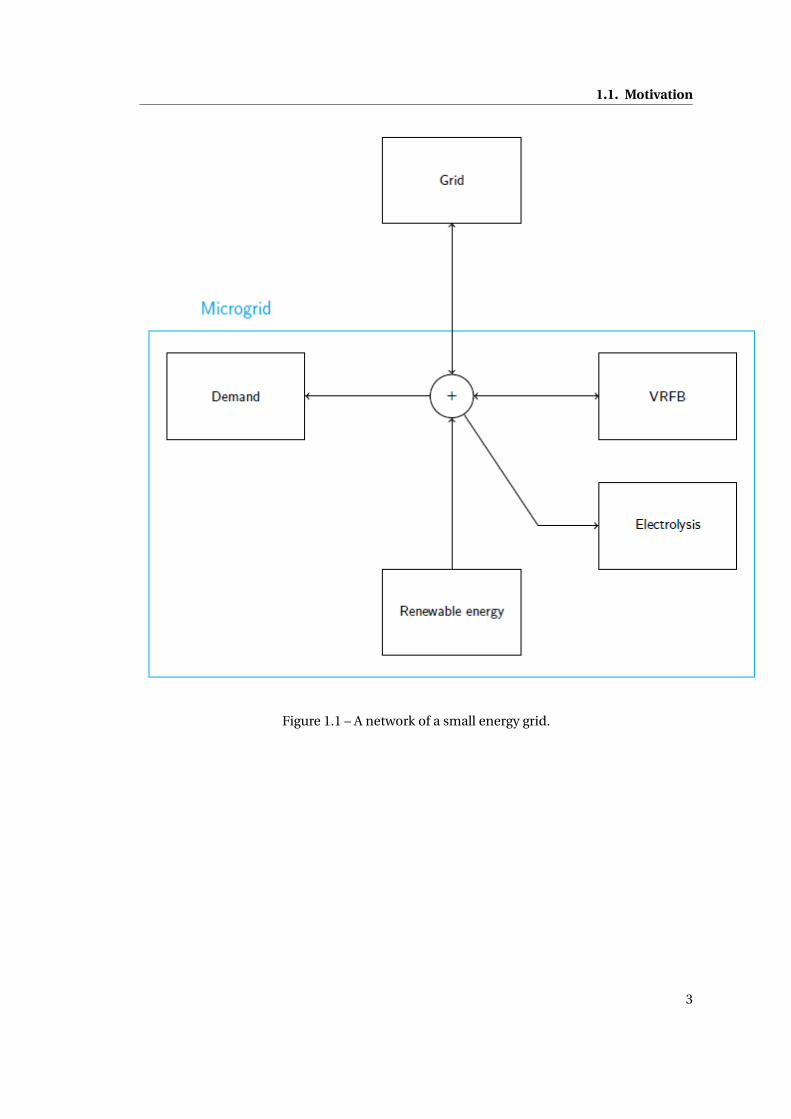
The following situation is considered, a small utilities company owns renewable means of
production such as solar panels or wind turbines. The company has a contract with local
residents of a town to provide energy to them. Since these sources of electricity are highly
fluctuating and cannot be produced at request, the company has a battery connected to
their grid. In this study they also have hydrogen storage in case the battery should be fully
charged and there is an excess of renewable energy. In case the renewable energy and battery
cannot provide enough energy additional power from the grid may be used. The operator
of the grid wishes to maximize the operational performance of the network with respect to
some performance metric that will be defined shortly. For instance the operator could be
interested in maximizing the profit of operating the network. We define the microgrid to be all
the physical systems belonging to the company and its customers and the grid to be public
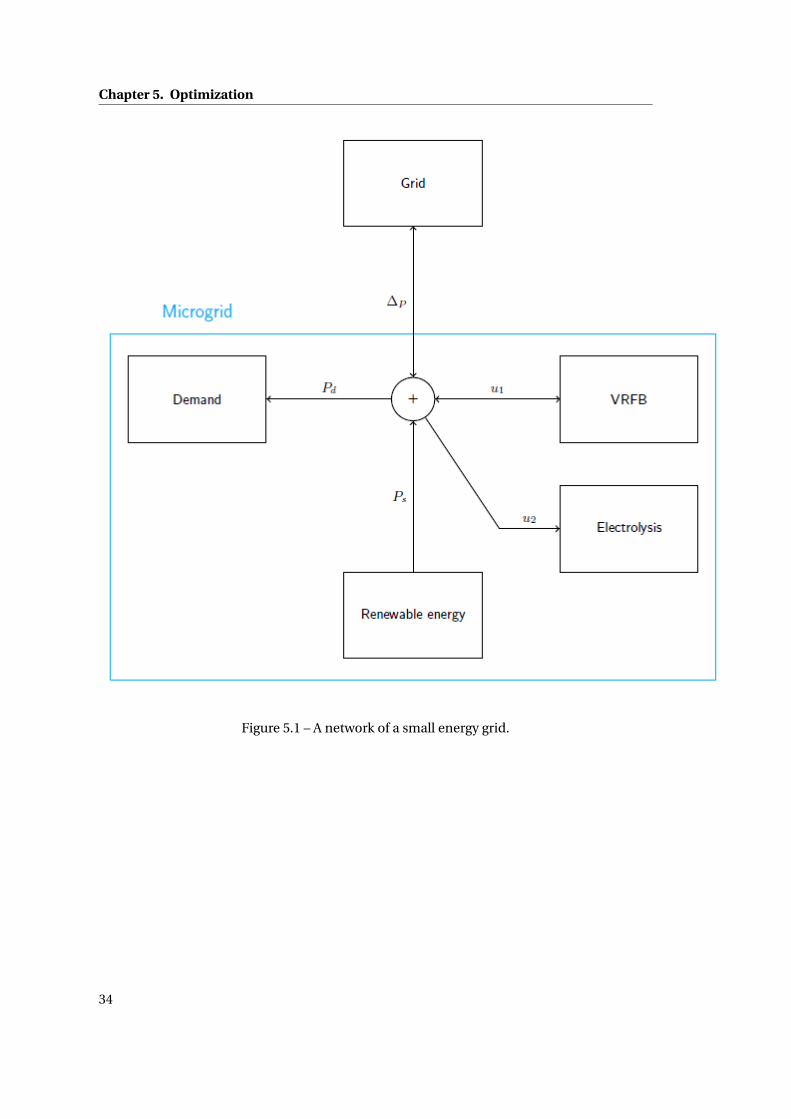
network where other companies trade electricity. The network in Figure 5.1 illustrates this
arrangement. Regarding the battery and the grid, define the following variables
u1 Power applied to the battery (instead of previously used u)
u2 Power for hydrogen generation
Ps Power generated from renewable sources (supply)
Pd Power demanded by consumers (demand)
For simplicity we have assumed that there are no losses and no disturbances in the network.
Recall that z4 was used to denote the power of the battery and u1 only when the battery
operates in power driven mode, however, when optimizing the battery, the power level is
expected to switch frequently and the battery will seldom reach the voltage thresholds.
33
Chapter 5. Optimization
Figure 5.1 – A network of a small energy grid.
34
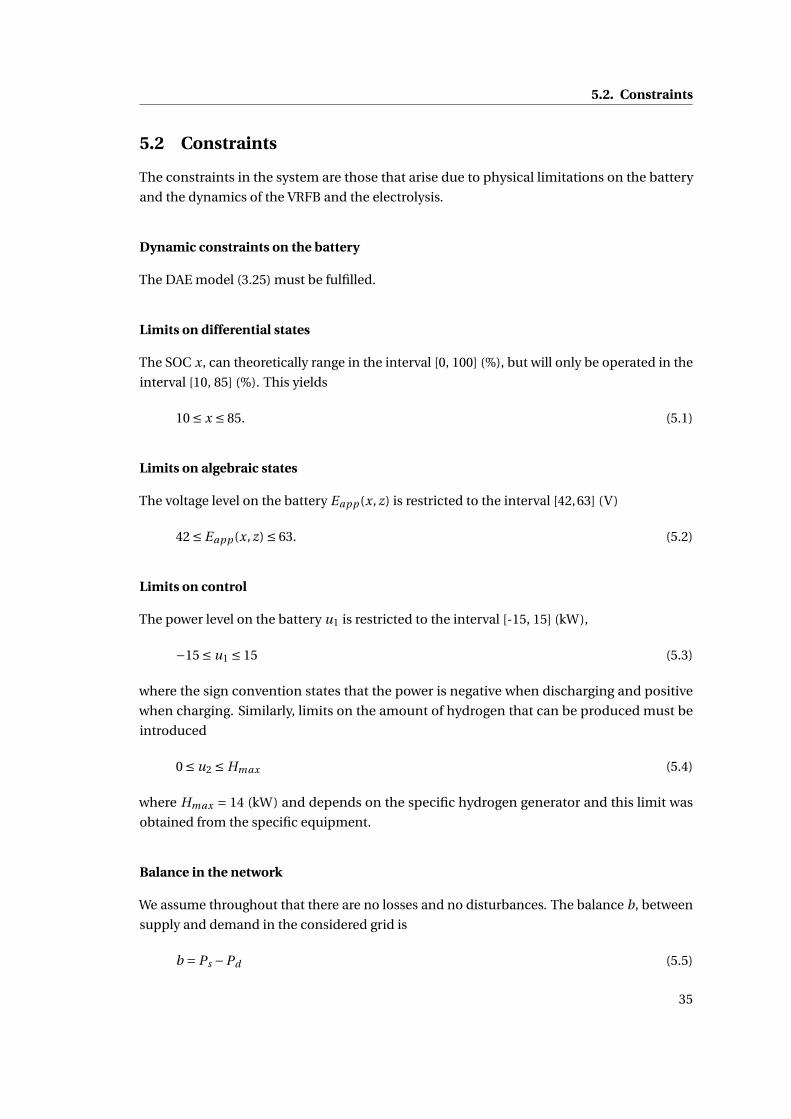
5.2. Constraints
5.2 Constraints
The constraints in the system are those that arise due to physical limitations on the battery
and the dynamics of the VRFB and the electrolysis.
Dynamic constraints on the battery
The DAE model (3.25) must be fulfilled.
Limits on differential states
The SOC x, can theoretically range in the interval [0, 100] (%), but will only be operated in the
interval [10, 85] (%). This yields
10 ≤ x ≤ 85. (5.1)
Limits on algebraic states
The voltage level on the battery Eapp (x, z) is restricted to the interval [42,63] (V)
42 ≤ Eapp (x, z) ≤ 63. (5.2)
Limits on control
The power level on the battery u1 is restricted to the interval [-15, 15] (kW),
−15 ≤ u1 ≤ 15 (5.3)
where the sign convention states that the power is negative when discharging and positive
when charging. Similarly, limits on the amount of hydrogen that can be produced must be
introduced
0 ≤ u2 ≤ Hmax (5.4)
where Hmax = 14 (kW) and depends on the specific hydrogen generator and this limit was
obtained from the specific equipment.
Balance in the network
We assume throughout that there are no losses and no disturbances. The balance b, between
supply and demand in the considered grid is
b = Ps −Pd (5.5)
35
Chapter 5. Optimization
From figure 5.1, overall power balance in the network requires that
∆P = b −u1 −u2 (5.6)
The sign convention states that u1 is positive if the battery is being charged and negative if
the battery is being discharged. Similarly, power going into the network is positive and power
going out of the network is negative. Thus u2, Ps and Pd are positive and ∆P which is what
must be bought from or sold to the grid can be positive or negative. We notice that if ∆P ≥ 0
then energy is sold to the main grid and if ∆P ≤ 0 then energy must be bought from the main
grid. These constraints on Ps and Pd will be enforced by given data so it is not necessary to put
bounds on them. Ps and Pd will be specified as time varying known functions and different
scenarios will be considered in the next chapter.
Final state of charge
It will be investigated to enforce the same final level of the state of charge as the initial one
x(t f ) = x(t0). (5.7)
The state of charge at final time could also be free.
5.3 Objective function
The optimization problem will be formulated as a minimization problem. Let L denote the
cost term over the entire time horizon (Lagrange term) and E denote the cost term at the final
time (Mayer term). The objective function J is then the sum of these terms
J (x0, z0,u(·)) = E(t f , x(t f ), z(t f ))+∫ t f
t0
L(t , x(t ), z(t ),u(t ))d t (5.8)
5.3.1 Cost at final time
Since the planning presented here is restricted to a limited time horizon it would clearly be
beneficial to deplete the battery at the end of the cycle, however, this would not necessarily be
optimal for times after the planning horizon. Thus by introducing a value on energy left in the
battery after the final time this problem can be reduced. This can be expressed as
E(·) =α f · x(t f ) (5.9)
where x(t f ) is the SOC at the final time for an attributed weight α f . However, for this study it
was decided to instead have a hard constraint for the final value of the state of charge (5.7).
36
5.3. Objective function
5.3.2 Cost over horizon for different objectives
We discuss here the optimal control problem for various objectives, e.g. maximizing profit or
minimizing the interaction with the main grid. We could also consider a weighted sum of the
objective functions presented below.
Minimize vertical net load
This objective is referred to as minimizing the vertical net load or minimzing the vertical grid
load. In this objective we aim at minimizing the amount of energy that has to be bought
from the grid. In literature the problem of peak shaving is common. This consists of storing
energy when consumption is less than demand and used at high demand or peak hours. Since
the electricity produced in the microgrid is renewable, this objective also attempts to reduce
emissions since the electricity from the grid cannot be guaranteed to be climate neutral. This
objective of minimizing the vertical net load is essentially the same as maximizing the self
consumption commonly studied in literature, which comes down to operating the battery so
as to maximize its usage and thus simultaneously minimizing the amount of energy bought
from or sold to the main grid. The cost function is
L(·) = ||∆P (t )||2Q (5.10)
where Q is a positive definite weighting matrix. We could here consider different norms, e.g.
1-norm, 2-norm or ∞-norm. Charge balance is required
∆P (t ) = Ps(t )−Pd (t )−u1(t )−u2(t ) ∀t ∈ [t0, t f ]. (5.11)
We aim at minimizing the cost function J (·) = E(·)+∫ t f
t0L(·)d t . In this optimization problem
the electrolysis for H2 generation will be used when the battery is fully charged and there is an
excess of renewable energy produced, which can be formulated
u2(t ) =0 if ∆P ≤ 0∨x < 85
∆p if ∆P ≥ 0∧x ≡ 85(5.12)
Extension of this problem We may also consider a modification of the above problem where
we need to supply a demand for a certain time horizon only with energy from the renewable
sources and from the battery i.e. the microgrid is not connected to the grid. Let t0 be the initial
time and t f the final time, also define the intermediate time tm such that tm > t0 and t f > tm .
Then the first time horizon [t0, tm] acts as a warm up period where the microgrid is connected
to the grid and the battery can be charged to provide enough energy for the period (tm , t f ].
The objective function is the same as before over the time horizon [t0, t f ], charge balance is
37
Chapter 5. Optimization
required, as previously
∆P = Ps −Pd −u1 −u2 ∀t ∈ [t0, t f ] (5.13)
But we also introduce the constraint
∆P ≡ 0 ∀t ∈ (tm , t f ] (5.14)
so that the microgrid is operated autonomously in the second part of the time horizon. We
note that it is important to choose tm such that the resulting problem is feasible with respect
to the production and consumption plans. This is sometimes referred to as islanded operation
in the literature.
Maximizing profit
We also consider the problem of maximizing the profit associated to the operation of the
microgrid. The cost function is
L(·) = c(t ) ·∆P + cH2 ·α ·u2 (5.15)
c(t ) is the sell or buy price of electricity at the grid at hour t , ∆p is the amount of energy sold or
bought from/to the grid. α is the efficiency factor of the electrolysis, we have from before that
α= 0.5 and u2 is the amount of power (W) that is used to produce hydrogen and cH2 = 0.02
is the price for hydrogen (CHF/kWh) which is assumed to be fixed. We comment that the
hydrogen price is lower than the buy price of the grid, thus only electricity from the renewable
generation is expected to be used for producing hydrogen. By making use of this formulation
we do not need to include the dynamic equation for electrolysis discussed in the beginning of
this chapter, the alternative formulation is discussed below, which is needed if the hydrogen is
modeled with more complicated dynamics. We will also have that
c(t ) =csel l (t ) if ∆P > 0
cbuy (t ) if ∆P ≤ 0(5.16)
Recall if ∆P > 0 then there is an excess of power available and if ∆P < 0 there is a shortage of
power. We aim at maximizing the cost function J (·) = E(·)+∫ t f
t0L(·)d t or equally minimizing
−J(·). We also assume that there are no cost for providing energy to the network, known as
feed in tariffs. Also note that if the battery is not empty at the final time, then there is value
from this electricity. Thus as final cost we take E as in equation (5.9).
Alternative formulation Since the hydrogen price was assumed constant we may formulate
this differently by putting the profit from hydrogen as a terminal cost which incorporates the
38
5.3. Objective function
profit from all hydrogen produced over the time horizon
E(·) = cH2 · xH (5.17)
where cH2 is the fixed H2 price and xH is the amount of H2 produced during the considered
period. Then the cost over the time horizon is
L(·) = c(t ) ·∆p (5.18)
We also need to incorporate the dynamic equation for the electrolysis (3.31) as a constraint of
the optimal control problem.
Minimize emissions of green house gases
L(·) = ||min(∆P (t ),0)||2Q (5.19)
where
min(∆P (t ),0) =∆P (t ) if ∆P (t ) < 0
0 if ∆p ≥ 0(5.20)
Thus there is no penalty on selling power, but there is a penalty on buying power which is
motivated by the assumption that the sold power is renewable whereas the bought power is
not renewable.
Preventing aging of battery
We may also consider the long term cost of operating the battery to reduce aging of the
battery, for each charge and discharge cycle. The battery deteriorates after usage in certain
conditions and this could be included in the optimization formulation. In the literature this
problem has been attempted by avoiding too high state of charge values and also by limiting
the temperature of the battery [12], however for this study we assume a constant temperature.
Maximizing the state of charge
We may also consider maximizing the state of charge of the battery, either at all times or at the
final time while meeting customer demands. For this problem we could also take electricity
prices into account. In the first case we get the cost function
L(·) = ||xmax −x(t )||2 (5.21)
39
Chapter 5. Optimization
where xmax = 85 is the maximal state of charge, E(·) = 0. In the latter case we get the cost
function
E(·) = x(t f ) (5.22)
and L(·) = 0. We aim at maximizing the cost function. This objective will typically lead to
a high amount of energy being bought from the main grid. This issue can be reduced by
introducing limits on the amount that can be bought at each time ∆P (t ) ≤β ∀t ∈ [t0, t f ], for
some suitable β ∈R.
Weighting all objectives together
It could also be interesting to consider as objective function a weighted sum of all the objectives
presented above.
5.4 Optimal control problem
The full OCP is now presented.
minimizeu(·)
E(t f , x f , z f )+∫ t f
t0
L(t , x, z,u)d t
subject to x = f (x, z,u) dynamic constraints, eq (3.26)
0 = g (x, z,u) algebraic constraints eq (3.27)
10 ≤ x ≤ 85 limits on state of charge (%)
42 ≤ Eapp (x, z) ≤ 63 limits on voltage (V)
−15 ≤ u1 ≤ 15 limits on power (kW)
0 ≤ u2 ≤ 14 limits on power (kW)
∆P = Ps(t )−Pd (t )−u1 −u2 network power balance
x0 given initial state of charge known
(5.23)
Different objectives
We have considered different objectives in terms of our goal of operating the battery, we here
present the objective functions for those OCPs in Table 5.1 using the notation described in the
previous sections
To limit the scope of this study we restrict ourselves to only consider the first two objectives in
Table 5.1.
40
5.5. Implementation aspects
Comment E LMinimize vertical net load 0 ||∆P (t )||2Q
Maximize profit 0 c(t ) ·∆p + cH2 ·α ·u2
Maximize final SOC x(t f ) 0Maximize SOC 0 ||xmax −x(t )||2
Minimize emissions 0 min(∆P ,0)
Table 5.1 – Different objectives.
5.5 Implementation aspects
The time horizon was chosen to one day since the data have typical trends for a day. The
optimal control problem stated in the previous section is open loop where the consumption-
and production- profiles and the prices are known in advance. Therefore it also proposed
to solve the OCP in a way similar to MPC (Model Predictive Control). The idea is to solve
the OCP over a limited time horizon, then apply the first value of the optimal feedback, let
the dynamics of the system evolve and then iterate this process over the full time horizon.
This is more realisitic, since in reality the accuracy of the forecasts of consumption- and
production- profiles would decrease drastically with time and only the forecast for the next
few hours may be accurate enough. Furthermore this MPC like approach takes the problem
of not prefectly knowing the consumption- and production- profiles into account by only
considering a subinterval of the full time horizon when solving for the optimal feedback. The
approach is sketched below.
Receding horizon OCP
u = solveOCP(t0, t f , data(t0, t f ))
Apply u and evolve dynamics of VRFB
t0 := t0 + ti nc, t f := t f + ti nc
where ti nc is the length of each control interval and data(t0, t f ) are the production, consump-
tion and prices over the interval [t0, t f ], ti nc is the same as the control interval. We note that
for the receding horizon approach the state of charge at final time was free.
Toolbox
The MATLAB toolbox GPOPS II was used to solve the optimal control problem [20].
5.6 Performance metrics
Some metrics for analyzing the results are discussed.
41
Chapter 5. Optimization
Emissions of greenhouse gases
We note that when ∆P < 0 energy is bought from the grid and when b < 0 there is a shortage
of energy and power must be provided either from the battery or the grid. The energy from
the grid is assumed to be a result of various means of production and will thus yield higher
emissions of greenhouse gases. If the battery had not been included in the network the power
company would have been forced to always buy electricity when the balance is negative. Thus
by comparing what is largest
I1 =∫ t f
t0
∆−P (t )d t (5.24)
or
I2 =∫ t f
t0
b−(t )d t (5.25)
where
∆−P (t ) =
∆p (t ) if ∆p (t ) ≤ 0
0 if ∆p (t ) ≥ 0(5.26)
and similarly
b−(t ) =b(t ) if b(t ) ≤ 0
0 if b(t ) ≥ 0(5.27)
We conclude by stating that if I1 > I2 then the battery and the optimal control policy has
helped in reducing the emission of greenhouse gases. To simplify the evaluation and avoid
confusion we propose instead to check the following criteria
|I1| < |I2| (5.28)
and will in the results section present the absolute value of I1 and I2.
Operating profit
With the battery in the network the profit is
P1 =∫ t f
t0
c(t ) ·∆P (t )d t (5.29)
and without having the battery the profit is
P2 =∫ t f
t0
c(t ) ·b(t )d t (5.30)
42
5.6. Performance metrics
We note that if P1 > P2, then the profit is larger when having the battery compared to without.
Negative profit means costs. We also note that for an accurate comparison the cost of the
battery should be taken into account. We suggest to take the average profit of one day in
July and one in December to give an approximate value for profit of an average of the year.
Then knowing the price of the battery, the number of years until the battery pays off can be
determined and hopefully this number is smaller than the expected life length of the battery.
43
6 Results
Due to very long computation times for some problems as well as for limiting the length of this
thesis, we restrict ourselves to consider only a few cases. The cases that will be considered are
an open loop control policy and a receding horizon approach over one day. In the appendix the
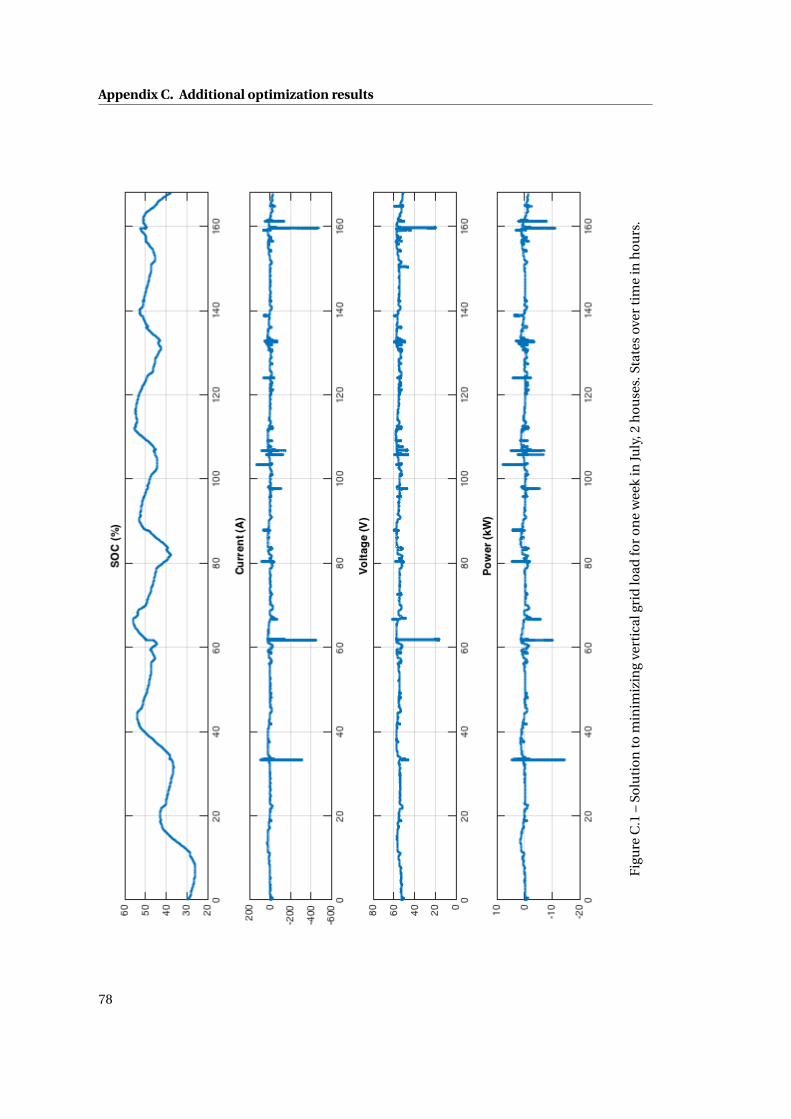
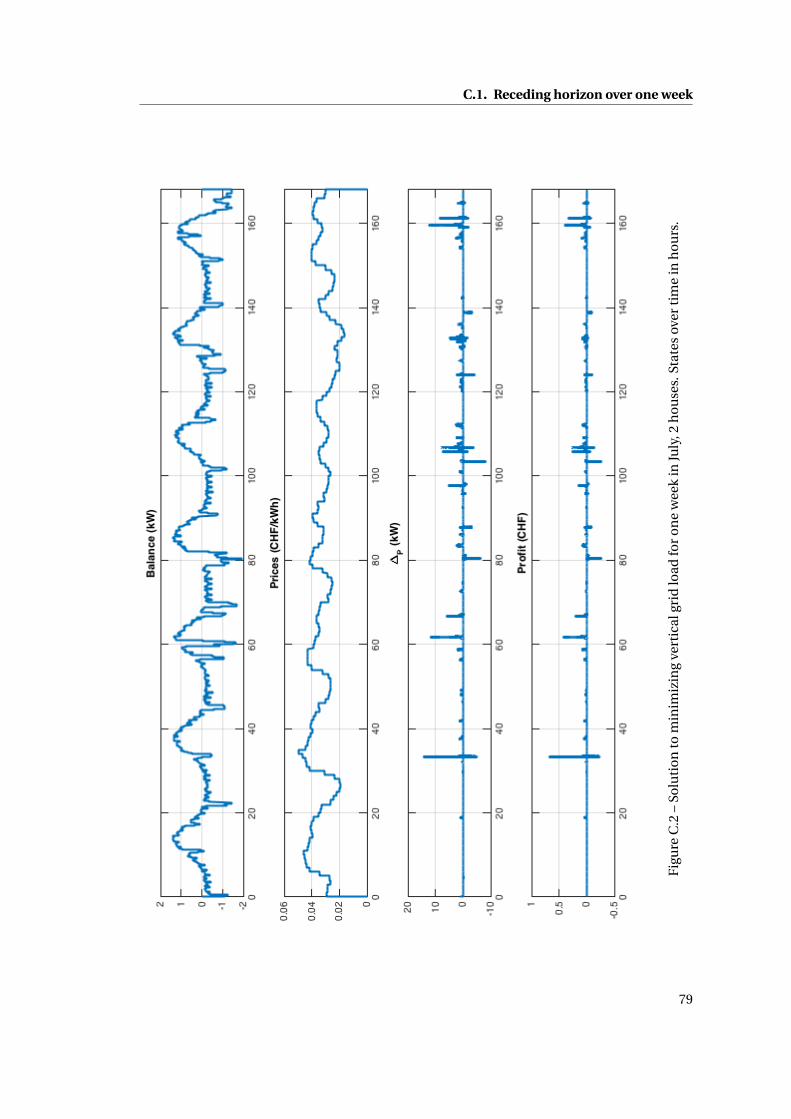
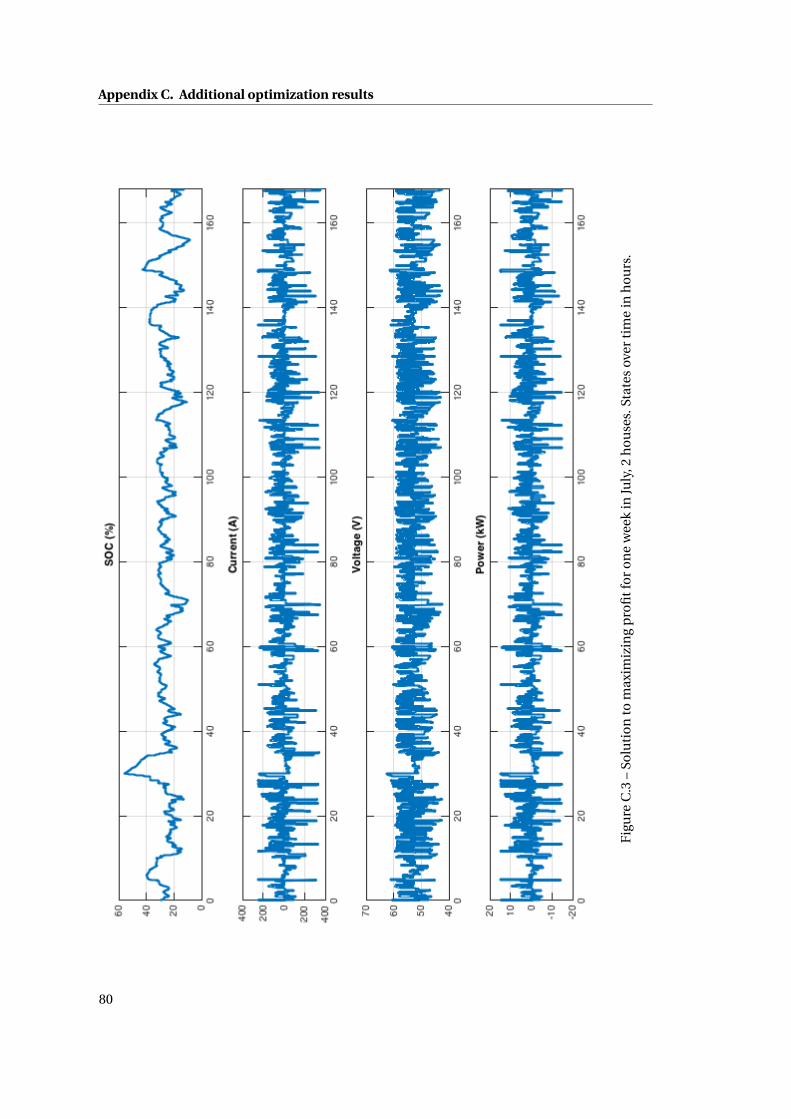
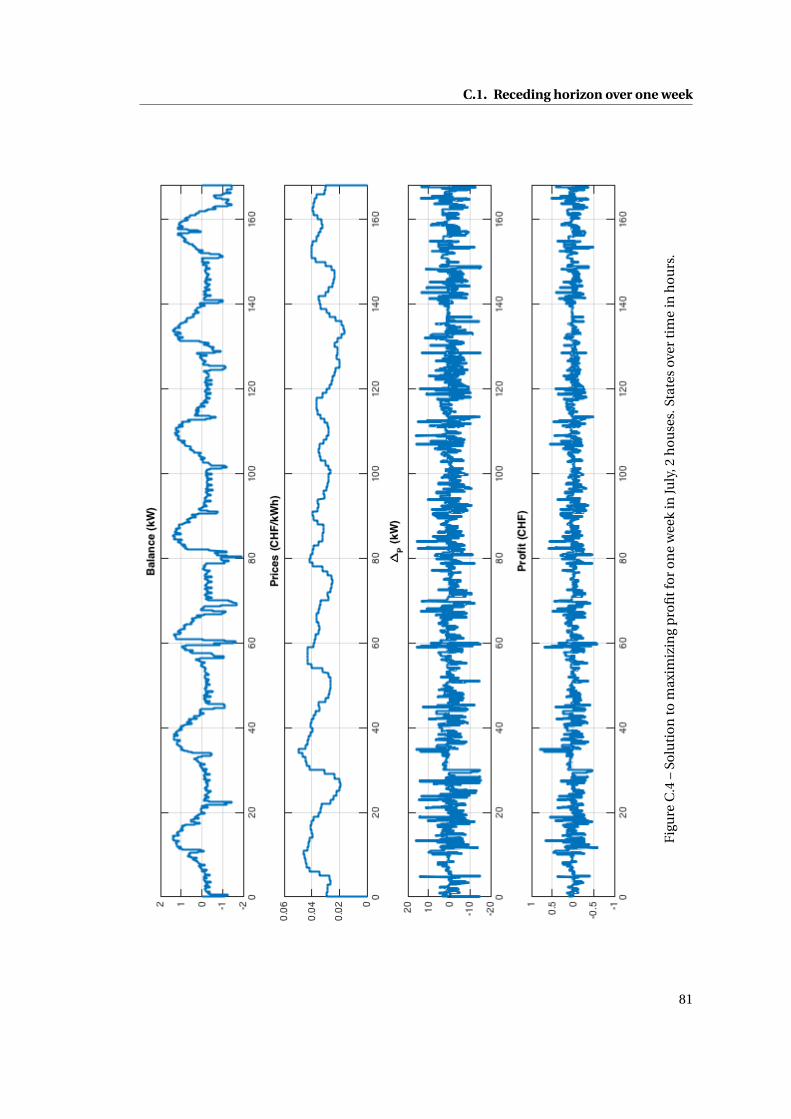
receding horizon approach over one week is included, but without analyzing the performance
metrics. It was attempted to scale up the data significantly to 20 houses instead of 2 houses,
while keeping the battery size the same. The attempts were unsuccessful. Adjusting the
settings in the solver and providing a better initial guess for the optimal solution might have
solved the problem for 20 houses, however, due to long computation times (typically more
than 10 hours on desktop computer) and limited time for the project this was not done.
We note that in the modeling and estimation part of the project it was desired to optimize the
model for power levels around 10 kW. However, in the optimal control policy of the battery
presented in the next sections, the battery is most of the time not operated in this region. One
reason for this is that the data used are not completely accurate, the data have been acquired
from different sources and rescaled to fit to average values of power consumption and demand
but may not adapt completely to the region were the battery is currently installed. Another
reason is that in the considered setup the size of the photovoltaics is of appropriate size for 2
houses and not considered as a big farm operated by the company. Since the photovoltaics are
adapted in size for 2 houses they typically do not produce too much nor too little and therefore
on an average day the balance (difference between supply and demand) should be close to
0 (zero) (W). The customer do not want to buy too many square meters of solar panels to
constantly overpoduce, neither too few square meters to constantly having to buy electricity
from the grid.
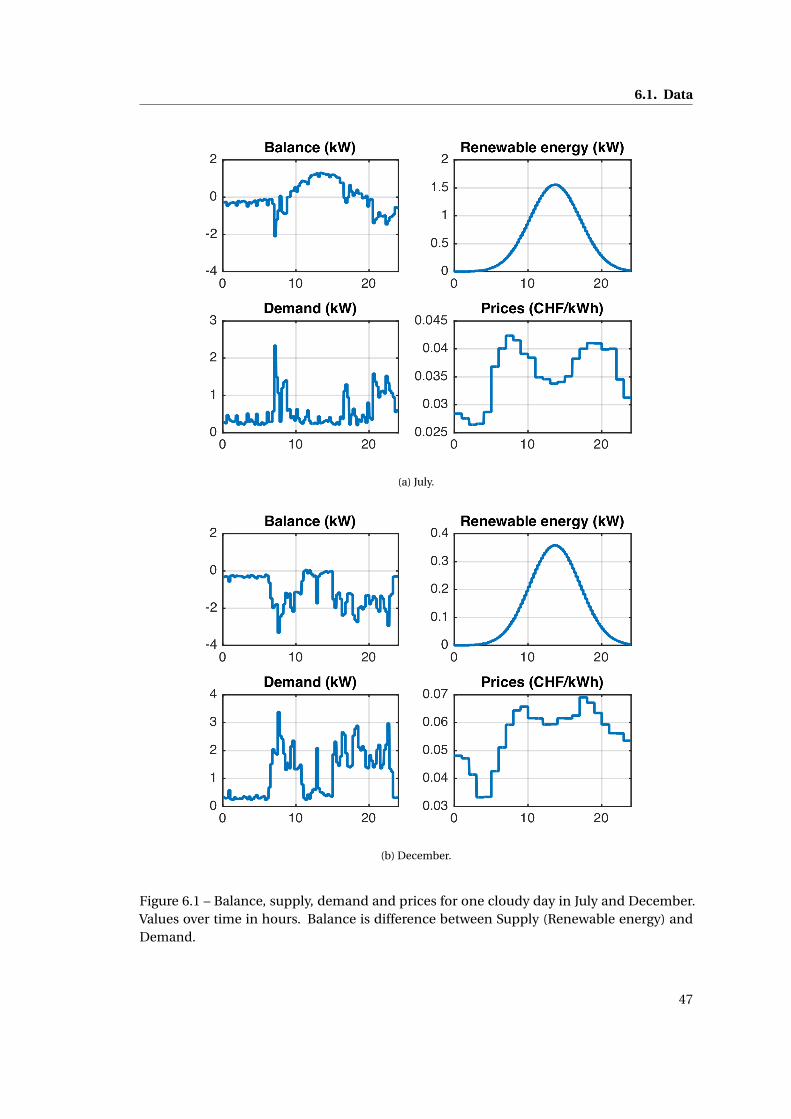
6.1 Data
The supply (Renewable energy) is from photovoltaics (solar cells), the data used were de-
termined from measurements [28] but has been smoothed by fitting a Gaussian curve. The
demand was obtained from a time varying profile with measurements every minute during
45
Chapter 6. Results
a day but has been smoothed over 15 minutes due to high fluctuations. The data are from a
house [29] where measurements have been obtained every minute, and has been rescaled so
that the total consumption over one year is that of a Swiss standard house, that is 4500 (kWh).
The price of electricity is a time varying profile were prices are constant during one hour
[30]. The VRFB under study is suitable for ca 2 houses and 40-50 m2 solar panels. Data was
available for all months of the year but July and December were chosen since they represent
the two extremes of the year. July is the sunniest period of the year and is associated with a low
consumption, whereas December has the fewest sun hours and presents high consumption.
46
6.1. Data
(a) July.
(b) December.
Figure 6.1 – Balance, supply, demand and prices for one cloudy day in July and December.Values over time in hours. Balance is difference between Supply (Renewable energy) andDemand.
47
Chapter 6. Results
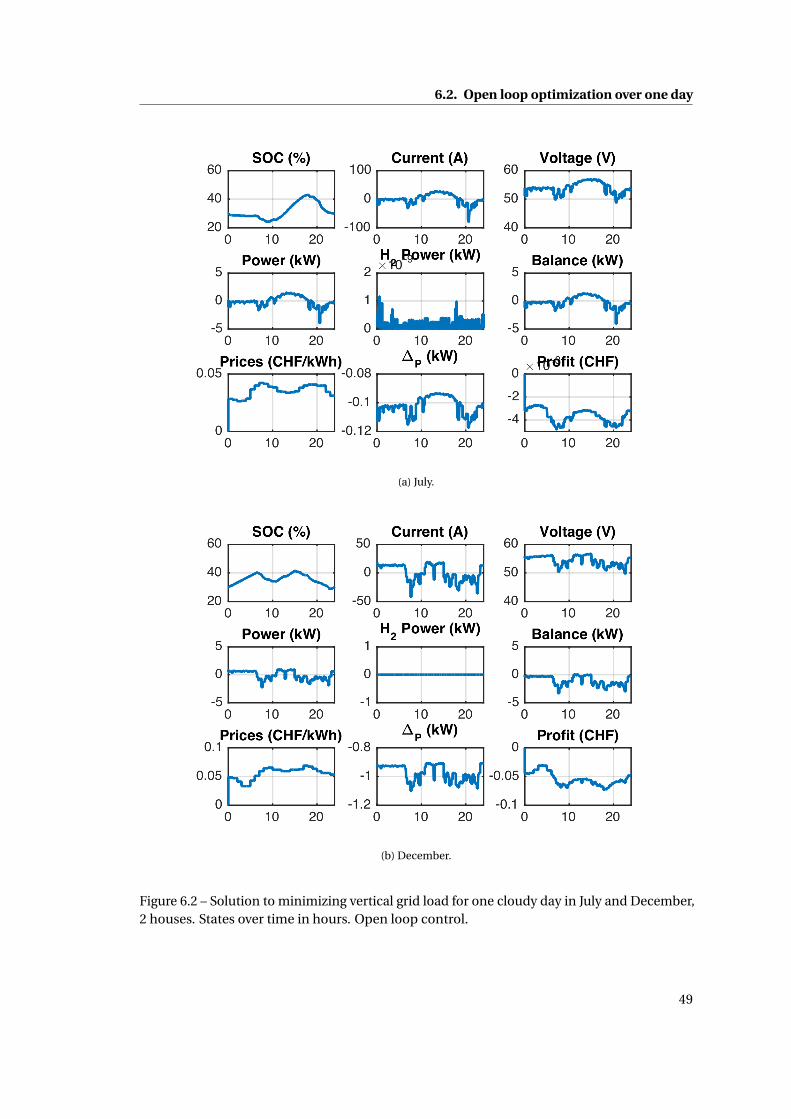
6.2 Open loop optimization over one day
The initial state of charge was chosen to x(t0) = 30%, the final state of charge was enforced to
be the same as the initial, x(t f ) = x(t0). The two objectives of minimizing vertical grid load
and maximizing profit were investigated. The data were scaled for 2 houses. Data for one day
in July was used as well as data for one day in December. By open loop it is meant that the
feedback is computed for the whole day at once.
48
6.2. Open loop optimization over one day
(a) July.
(b) December.
Figure 6.2 – Solution to minimizing vertical grid load for one cloudy day in July and December,2 houses. States over time in hours. Open loop control.
49
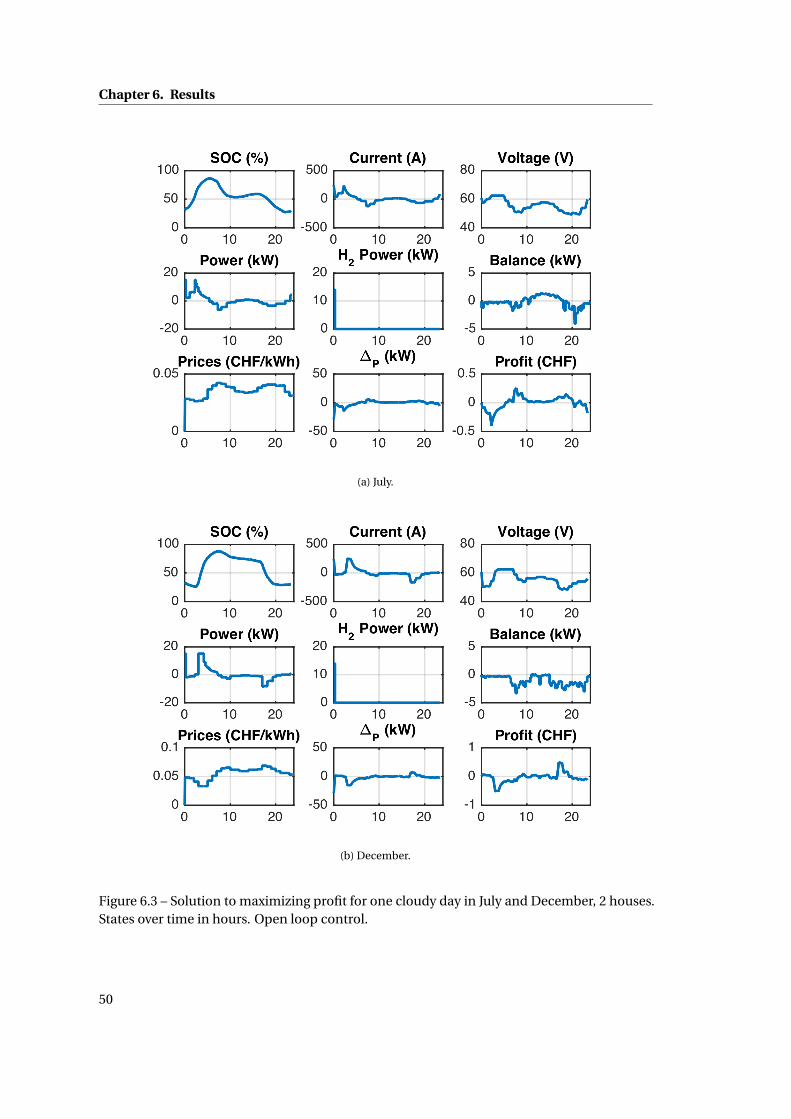
Chapter 6. Results
(a) July.
(b) December.
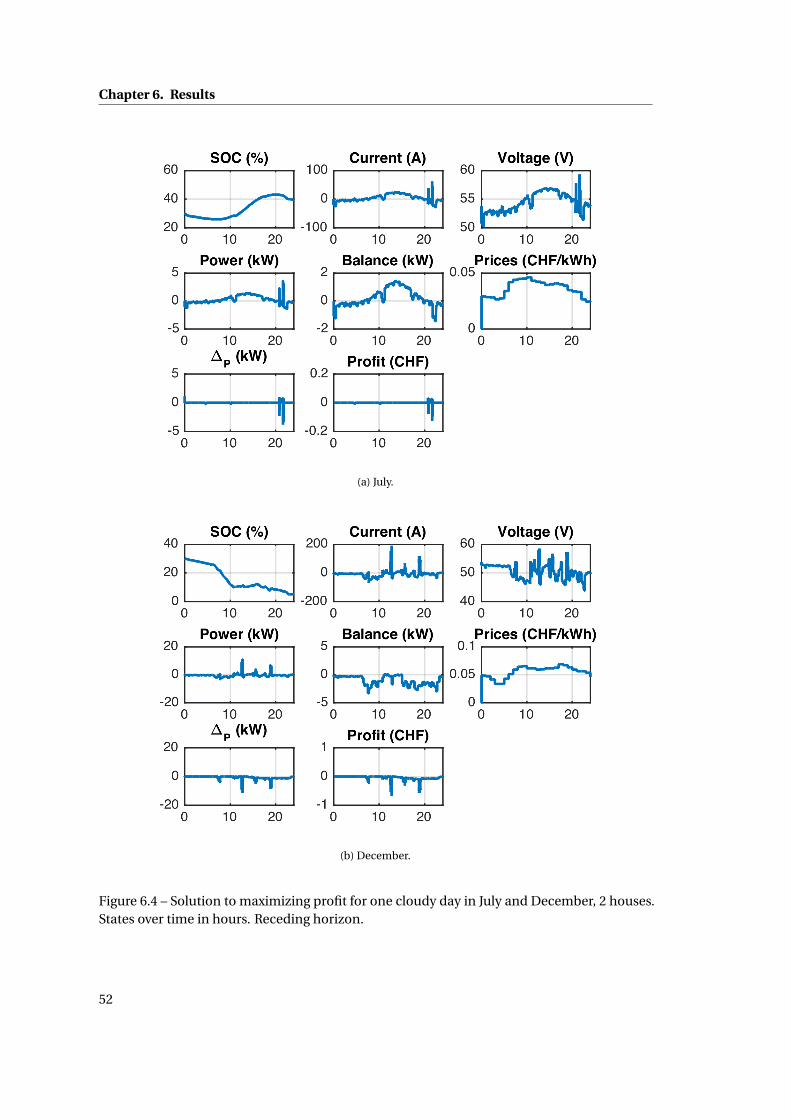
Figure 6.3 – Solution to maximizing profit for one cloudy day in July and December, 2 houses.States over time in hours. Open loop control.
50
6.3. Receding horizon optimization over one day
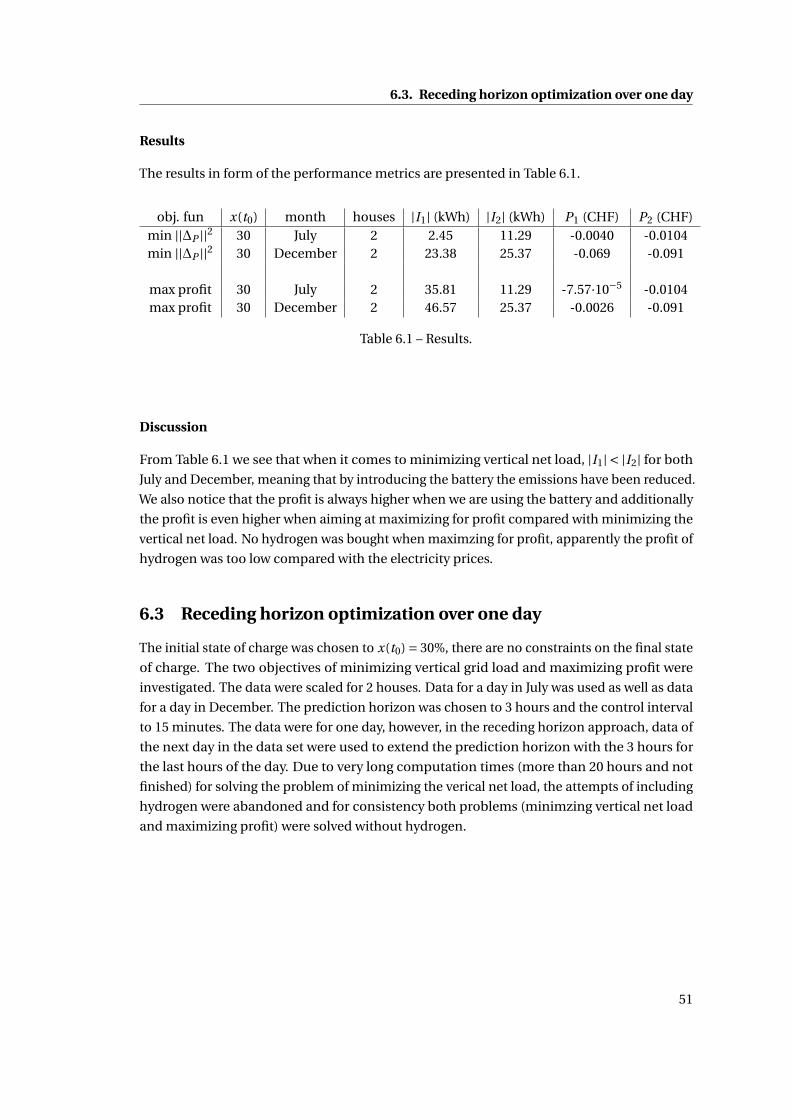
Results
The results in form of the performance metrics are presented in Table 6.1.