1 CSE190-B, Spring 2003 Computer Vision Binocular Stereo II Computer Vision CSE 190-B Lecture 13 CSE190-B, Spring 2003 Computer Vision Outline • Announcement: – Final Exam, Thursday, June 12, 3:00-6:00, WLH 2205 – Homework 3 posted to the web, due May 27 • Today – Rectification – Matching – Epipolar geometry CSE190-B, Spring 2003 CSE Distinguished Alumni Lecturer Programming Video Games Don Likeness President, Treyarch Corporation Friday, May 16, 2:00 – 3:00 AP&M 4301 See Don Likeness's profile at http://www.jacobsschool.ucsd.edu/alumni/profiles/winter03_likeness.shtml CSE190-B, Spring 2003 Computer Vision Binocular Stereopsis: Mars Given two images of a scene where relative locations of cameras are known, estimate depth of all common scene points. Two images of Mars CSE190-B, Spring 2003 Computer Vision Need for correspondence Truco Fig. 7.5 CSE190-B, Spring 2003 Computer Vision Triangulation
Transcript
1
CSE190-B, Spring 2003 Computer Vision
Binocular Stereo II
Computer VisionCSE 190-BLecture 13
CSE190-B, Spring 2003 Computer Vision
Outline• Announcement:
– Final Exam, Thursday, June 12, 3:00-6:00, WLH 2205
CSE Distinguished Alumni Lecturer Programming Video Games
Don LikenessPresident, Treyarch Corporation
Friday, May 16, 2:00 – 3:00AP&M 4301
See Don Likeness's profile at http://www.jacobsschool.ucsd.edu/alumni/profiles/winter03_likeness.shtml
CSE190-B, Spring 2003 Computer Vision
Binocular Stereopsis: MarsGiven two images of a scene where relative locations of cameras are known, estimate depth of all common scene points.
Two images of Mars
CSE190-B, Spring 2003 Computer Vision
Need for correspondence
Truco Fig. 7.5
CSE190-B, Spring 2003 Computer Vision
Triangulation
Nalwa Fig. 7.2
2
CSE190-B, Spring 2003 Computer Vision
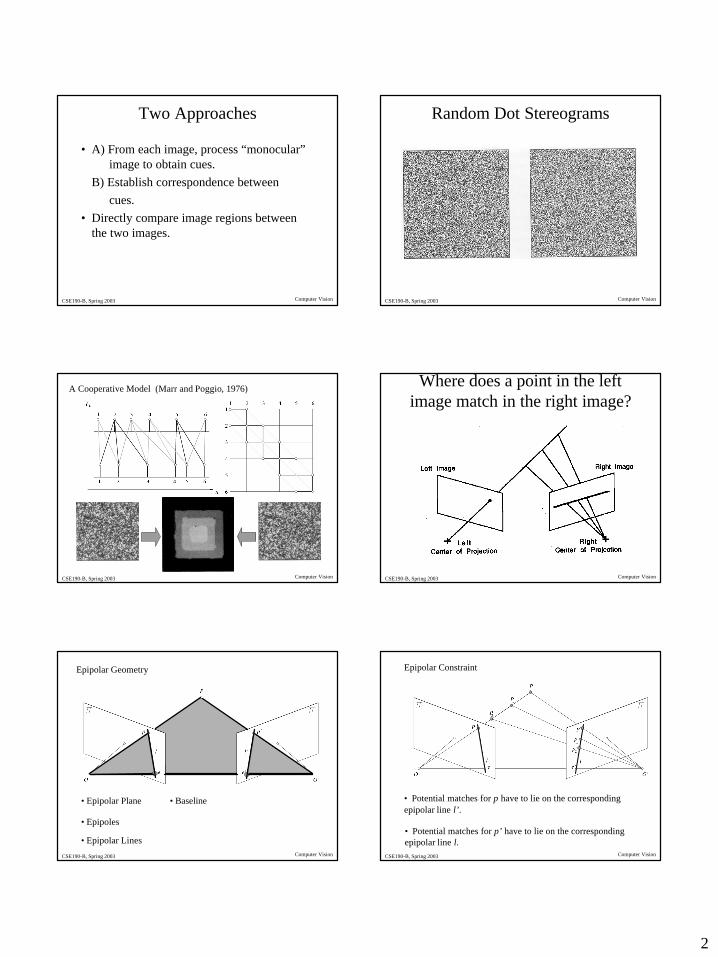
Two Approaches
• A) From each image, process “monocular” image to obtain cues.
B) Establish correspondence between cues.
• Directly compare image regions between the two images.
CSE190-B, Spring 2003 Computer Vision
Random Dot Stereograms
CSE190-B, Spring 2003 Computer Vision
A Cooperative Model (Marr and Poggio, 1976)
CSE190-B, Spring 2003 Computer Vision
Where does a point in the left image match in the right image?
Nalwa Fig. 7.5
CSE190-B, Spring 2003 Computer Vision
Epipolar Geometry
• Epipolar Plane
• Epipoles
• Epipolar Lines
• Baseline
CSE190-B, Spring 2003 Computer Vision
Epipolar Constraint
• Potential matches for p have to lie on the corresponding epipolar line l’.
• Potential matches for p’ have to lie on the corresponding epipolar line l.
3
CSE190-B, Spring 2003 Computer Vision
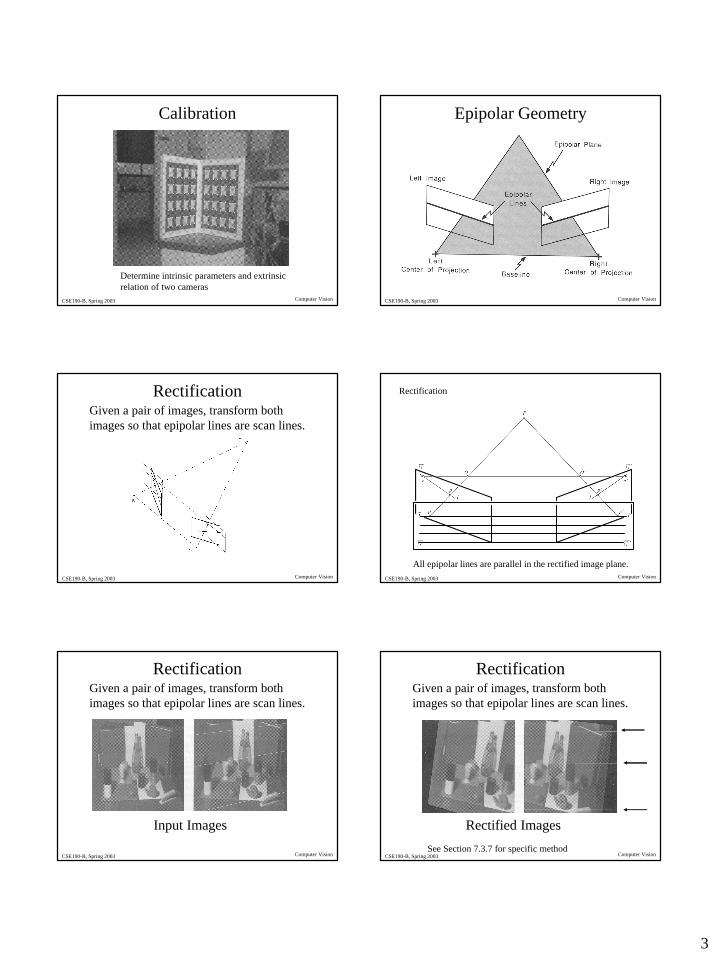
Calibration
Determine intrinsic parameters and extrinsic relation of two cameras
CSE190-B, Spring 2003 Computer Vision
Epipolar Geometry
CSE190-B, Spring 2003 Computer Vision
RectificationGiven a pair of images, transform both images so that epipolar lines are scan lines.
CSE190-B, Spring 2003 Computer Vision
Rectification
All epipolar lines are parallel in the rectified image plane.
CSE190-B, Spring 2003 Computer Vision
RectificationGiven a pair of images, transform both images so that epipolar lines are scan lines.
Input Images
CSE190-B, Spring 2003 Computer Vision
RectificationGiven a pair of images, transform both images so that epipolar lines are scan lines.
Rectified Images
See Section 7.3.7 for specific method
4
CSE190-B, Spring 2003 Computer Vision
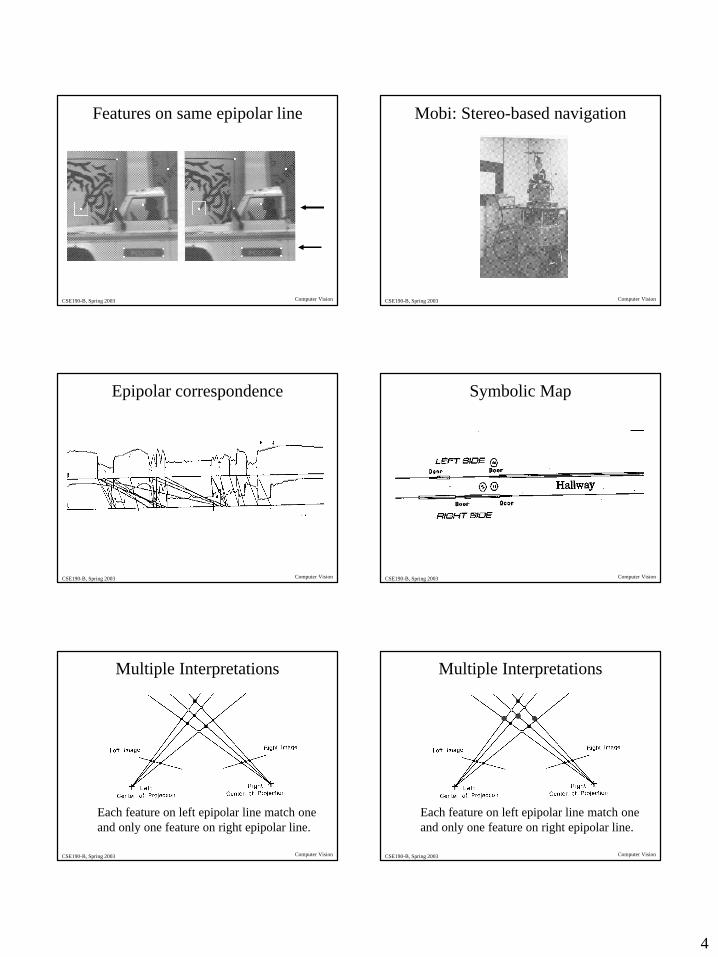
Features on same epipolar line
Truco Fig. 7.5
CSE190-B, Spring 2003 Computer Vision
Mobi: Stereo-based navigation
CSE190-B, Spring 2003 Computer Vision
Epipolar correspondence
CSE190-B, Spring 2003 Computer Vision
Symbolic Map
CSE190-B, Spring 2003 Computer Vision
Multiple Interpretations
Each feature on left epipolar line match oneand only one feature on right epipolar line.
CSE190-B, Spring 2003 Computer Vision
Multiple Interpretations
Each feature on left epipolar line match oneand only one feature on right epipolar line.
5
CSE190-B, Spring 2003 Computer Vision
Multiple Interpretations
Each feature on left epipolar line match oneand only one feature on right epipolar line.
CSE190-B, Spring 2003 Computer Vision
Multiple Interpretations
Each feature on left epipolar line match oneand only one feature on right epipolar line.
CSE190-B, Spring 2003 Computer Vision
Problem of Occlusion
CSE190-B, Spring 2003 Computer Vision
Ordering Constraint
CSE190-B, Spring 2003 Computer Vision
Dynamic Programming (Ohta and Kanade, 1985)
Reprinted from “Stereo by Intra- and Intet-Scanline Search,” by Y. Ohta and T. Kanade, IEEE Trans. on Pattern Analysis and MachineIntelligence, 7(2):139-154 (1985). 1985 IEEE.