31
Parameter Controlled Volume Thinning Nikhil Gagvani Deborah Silver
| Date post: | 16-Dec-2015 |
| Category: |
Documents |
| Upload: | kaylin-edling |
| View: | 215 times |
| Download: | 0 times |

Parameter Controlled Volume Thinning
Nikhil GagvaniDeborah Silver

Introduction
Algorithm for the Distance Transform Skeleton Extraction Algorithm for the Centerline Reconstruction

The Neighbors of a Voxel
F-Neighbors E-Neighbors V-Neighbors
A voxel is the smallset unique element of the volume.

Voxels
object-voxels background-voxels boundary-voxels 000000…
0000…00…
S
_S
BV
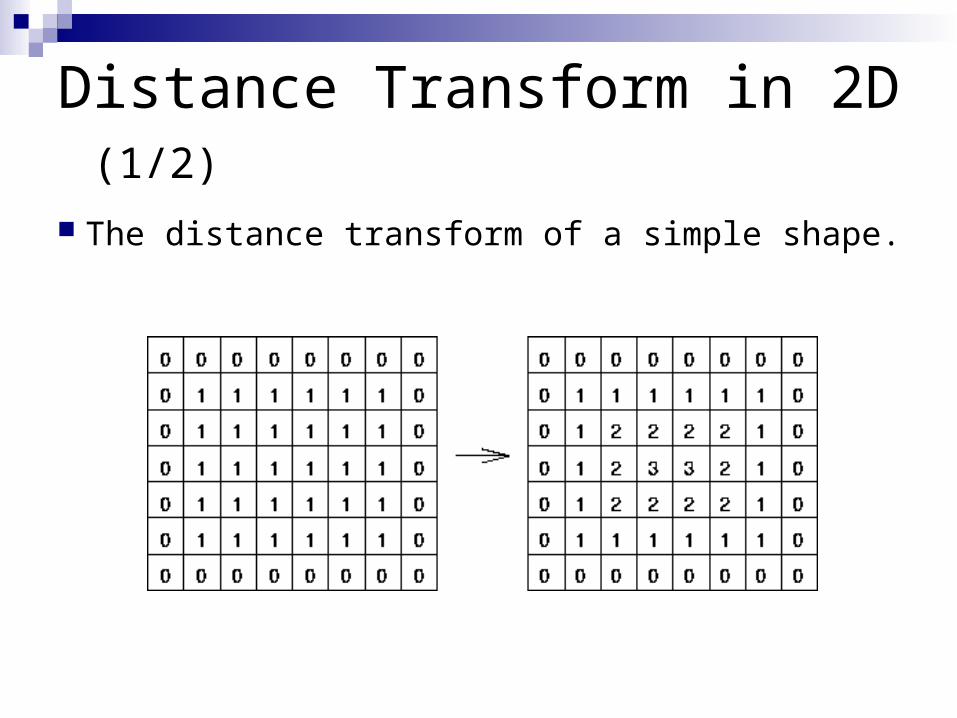
Distance Transform in 2D (1/2)
The distance transform of a simple shape.

Distance Transform in 2D (2/2)

Distance Transform in 3D (1/6)
The distance transform at a voxel p = {x,y,z} is defined as
: the distance from voxel(x,y,z) to voxel(i,j,k) BV : the set of boundary voxels
}),,(:)),,(),,,(({min),,(
BVkjikjizyxdDT tkji
p
td

Distance Transform in 3D (2/6)
We compute the distance using a <3,4,5> weighted distance metric.
F-neighbor : 3 E-neighbor : 4 V-neighbor : 5
td

Distance Transform in 3D (3/6)
Algorithm InitFirst pass
Calculate the Distance transform of boundary-voxels.
Second pass Propagate the boundary inward.
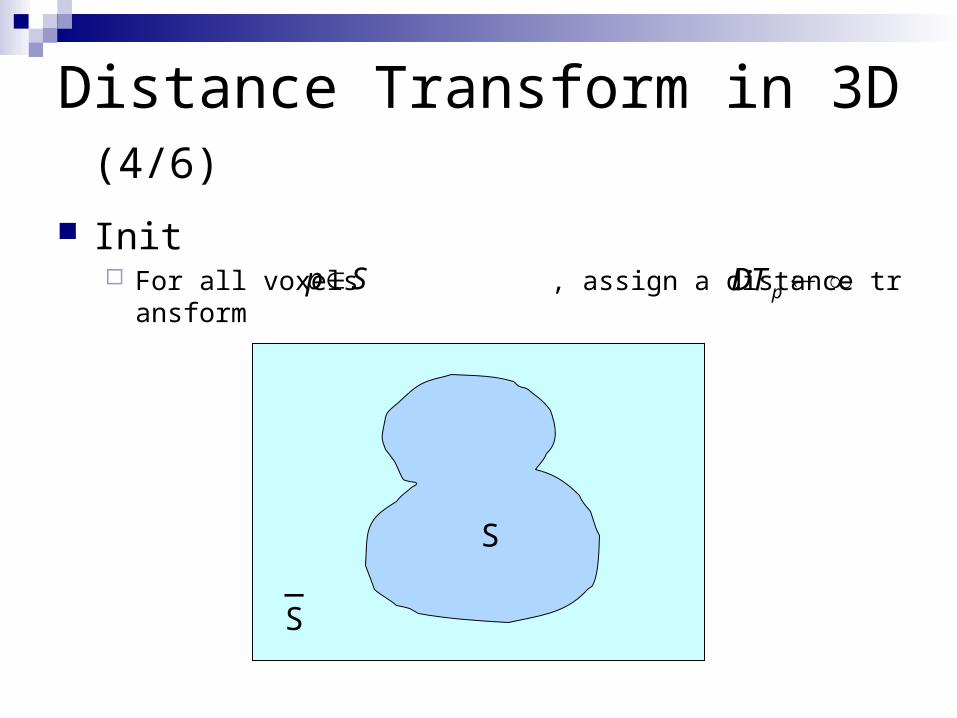
Distance Transform in 3D (4/6)
Init For all voxels , assign a distance transform pDT
S
_S
Sp

Distance Transform in 3D (5/6)
First pass Calculate the Distance transform of boundary-voxelsFor all voxels that have a (F/E/V) neighbor
{ (3 for face/ 4 for edge/ 5 for vertex);
Add p to BV ;
}
SqSp
pDT
S
_S
BV

Distance Transform in 3D (6/6)
Second pass Propagate the boundary inwardRepeat for all
Find all voxels which are (F/E/V) neighbors of p ;
Assign (3 or 4 or 5) } ;
Remove p from BV ;
Add r to BV ;
until no is modified
BVpSr
prr DTDTDT ,min{
rDT
S_S
BV

Skeleton Extraction (1/12)
Definition 1 If a voxel p has a distance transform , the Ball B
(p) associated with p is the set of object voxels q such that the distance from p to q is less then .
pDT
pDT
p
S_S
pDT

Skeleton Extraction (2/12)
Definition 2 The ball for an object voxel is maximal if it is not contai
ned in the ball of any other voxel.
Observation The set of voxels whose balls are maximal is sufficient
to reconstruct the object.
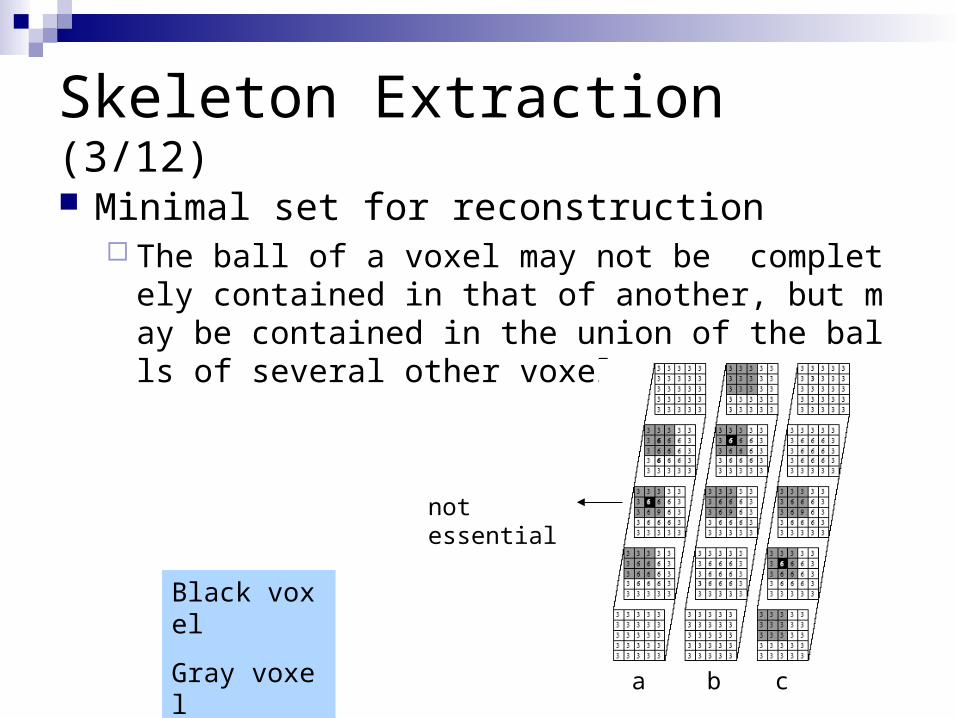
Skeleton Extraction (3/12)
Minimal set for reconstruction The ball of a voxel may not be completely contained
in that of another, but may be contained in the union of the balls of several other voxels.
a b c
Black voxel
Gray voxel
not essential
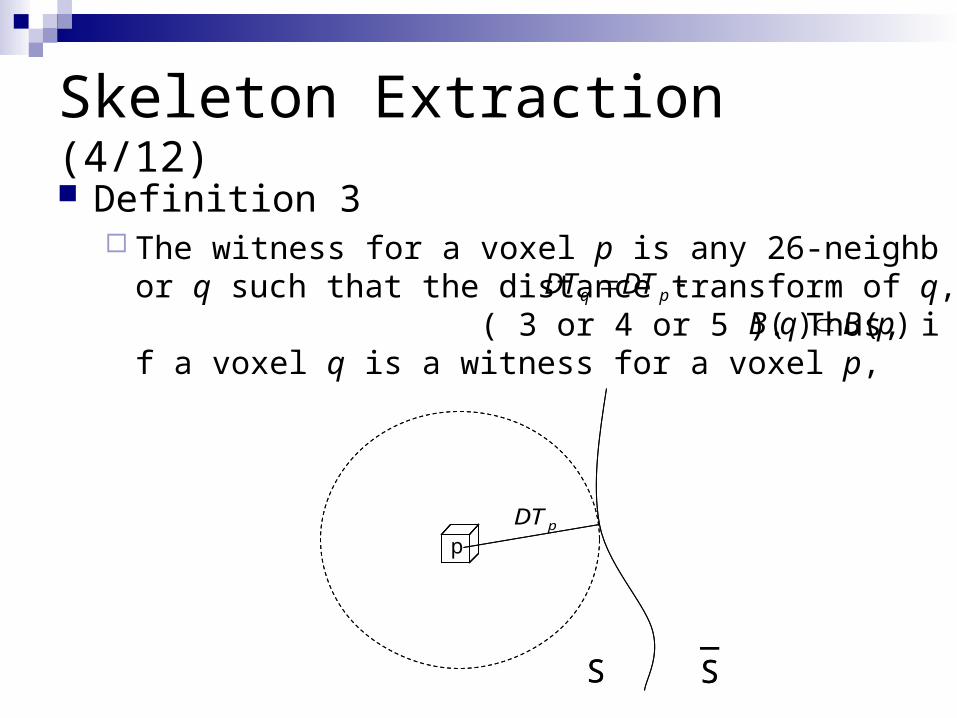
Skeleton Extraction (4/12)
Definition 3 The witness for a voxel p is any 26-neighbor q such that t
he distance transform of q, ( 3 or 4 or 5 ). Thus, if a voxel q is a witness for a voxel p,
pq DTDT
)()( pBqB
S_S
p
S_S
pDT

Skeleton Extraction (5/12) Claim 1
The ball of a voxel p must be contained in the ball of one of its 26 neighbor if it is to be contained in the ball of any other voxel in the object.
S_S
p
S_S

Skeleton Extraction (6/12)
To find non-witness voxels, the 26-neighbors of all object voxels need to be scanned. (brute force approach)
Rather than grow the ball for every neighbor and scan for containment in the union of balls, a simple approach is to average the DT value of the neighbors of p.iq
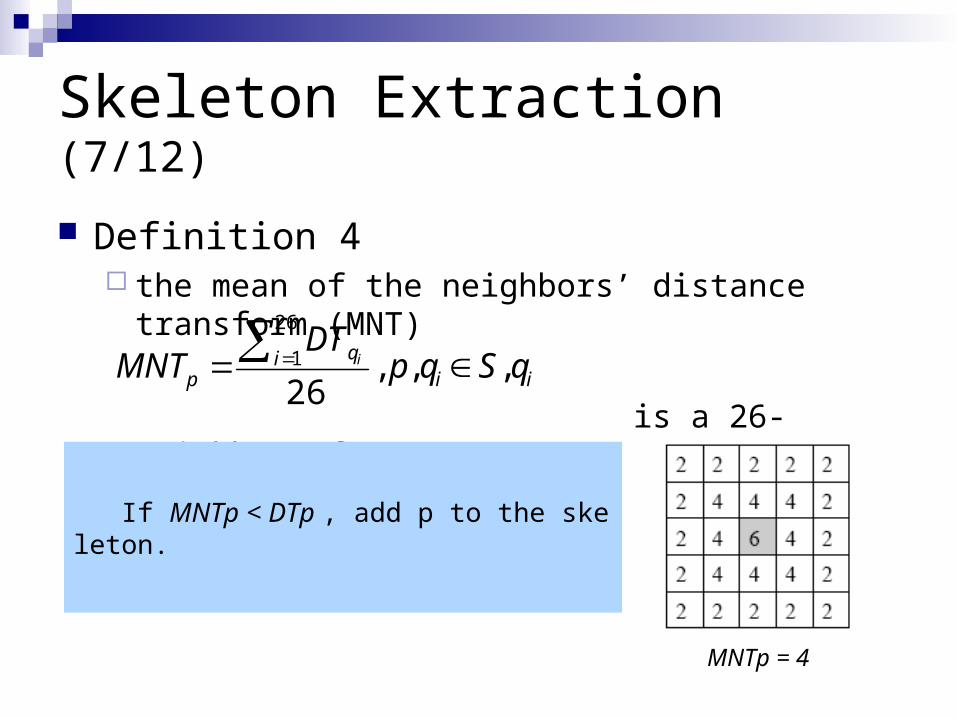
Skeleton Extraction (7/12)
Definition 4 the mean of the neighbors’ distance transform (MNT)
is a 26-neighbor of p.
iii q
p qSqpDT
MNT i ,,,26
26
1
If MNTp < DTp , add p to the skeleton.
MNTp = 4

Skeleton Extraction (8/12)
Thinness parameter (TP) We introduce the TP, that allows control over the rem
oval of non-witness voxels yielding skeletons of varying density.
Condition 1 If MNTp < DTp – TP , add p to the skeleton.
Low value of TP High value of TP
Thick Thin

Skeleton Extraction (9/12)
A maple leaf and it’s skeleton
The Complexity of this algorithm is therefore O(N) , where N is the number of object-voxels.
These skeletal voxels are not generally connected.(Spanning Tree)
TP = 0 TP = 2 TP = 4 TP = 6

Skeleton Extraction (10/12) Trachea
a. The segmented trachea
b. Skeleton with a thinness = 2.5
c. The minimum spanning tree of the skeletal voxels

Skeleton Extraction (11/12) Effact of the Thinness Parameter

Skeleton Extraction (12/12) Skeleton of S shape
Algorithm for the Centerline (1/4)
A centerline is a curve that is centered with respect to the object boundaries.
It can serve as the path for a virtual camera in surgical path planning.
It is a semi-automatic algorithm in which the user specifies end-points for centerline generation.

Algorithm for the Centerline (2/4)
SK : the set of skeleton voxels.
p1 and p2 : the end-points of the centerline , p1,p2 SK
F : subdivision parameter (“ fineness ”)

Algorithm for the Centerline (3/4) Centerlines for Surgical Navigation

Algorithm for the Centerline (4/4) Centerlines for Surgical Navigation

Reconstruction (1/3)
In order to reconstruct the object from the skeletal voxels, balls of radius equal to the distance transform value have to be constructed.
A path terminates when its value is less than or equal to 3 but greater than zero.
The quality of reconstruction depends upon the thinness of the skeleton.
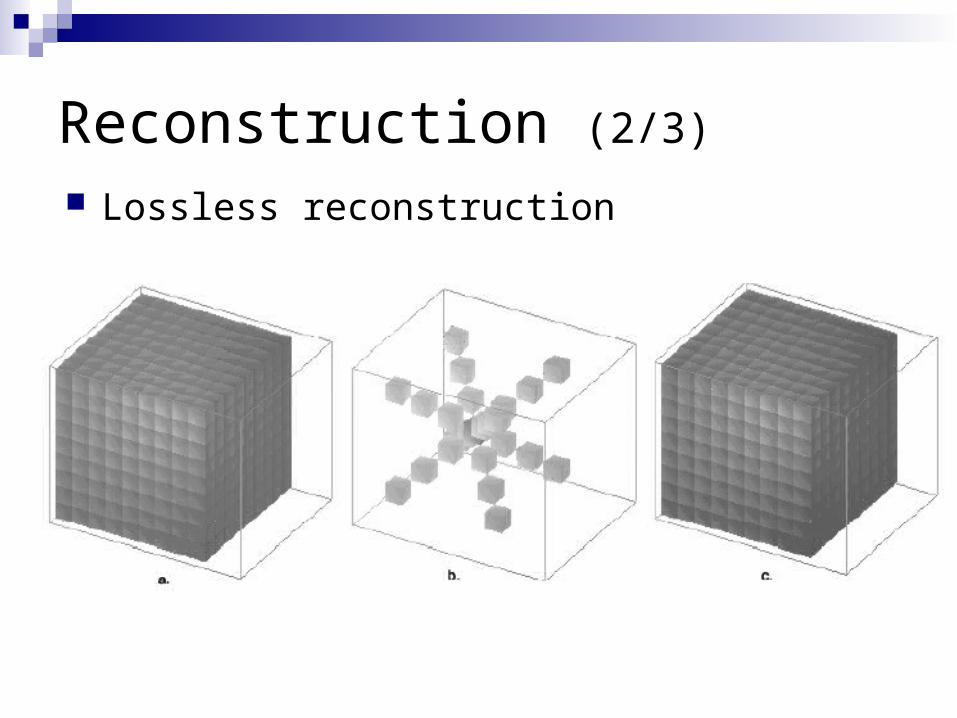
Reconstruction (2/3)
Lossless reconstruction

Reconstruction (3/3)
Lossy reconstruction











![Nikhil 23]](https://static.documents.pub/doc/80x56/557db12ad8b42a351d8b4dc1/nikhil-23.jpg)





