Parking Spaces Detection In Indoor Environments Based On Zigbee P. Corral, J. A. Pérez, A. C. D. C Lima, Member, IEEE and O. Ludwig Abstract— This paper describes the study about parking spaces detection in indoor environments, implementing a WSN (Wireless Sensor Network) based on ZigBee technology. Our study focuses on the analysis of the received power when a vehicle is parked or not, by monitoring the RSSI (Received Signal Strength Indicator) field defined in the MAC layer as the IEEE 802.15.4 describes. We focus in the analysis of three factors: data processing time, the influence of distance in received power and the attenuation effect in the signal when propagates, which determine the network topology to deploy and the validity of our location model. Keywords— WSN, Zigbee, RSSI, Gauss-Newton Algorithm. I. INTRODUCCIÓN L CAMPO RSSI nos permite evaluar el nivel de potencia de las señales recibidas en redes inalámbricas. Dicho campo ha sido utilizado habitualmente para el seguimiento de personas u objetos en entornos indoor mediante el análisis de la potencia recibida en contraposición con otros métodos basados en el tiempo o en el ángulo de llegada (TOA [1], AOA [2]). Nuestro objetivo es aprovechar el campo RSSI para la detección de plazas libres en parkings. Para ello basaremos nuestro estudio en la implementación de una red WSN (Wireless Sensor Network), sobre ZigBee, una especificación comercial basada en el estándar IEEE 802.15.4. La elección de dicho estándar atiende perfectamente a las características requeridas para el despliegue de nuestra red en un entorno indoor como es un parking subterráneo, salvando las lógicas limitaciones de un sistema de localización GPS (las señales GPS no pueden penetrar materiales y, como consecuencia, su uso no está recomendado en entornos indoor), además de permitirnos disponer de prácticamente un número ilimitado de nodos en comparación a otras tecnologías WPAN como Bluetooth, concretamente 65536 nodos ZigBee frente a 8 nodos Bluetooth, contando además con una filosofía de mínimo consumo y mínimo coste. Por todas estas razones suscritas anteriormente, planteamos un estudio sobre la implantación de una red WSN basada en el estándar ZigBee (IEEE 802.15.4) para la localización y gestión de plazas de aparcamiento libres/ocupadas en aparcamientos públicos subterráneos y el desarrollo de aplicaciones software tanto para la gerencia como para los clientes, ayudando a las tareas de gestión al P. Corral, Miguel Hernandez University, Spain, [email protected]J. A. Perez, Miguel Hernandez University, Spain, [email protected]A. C. D. C. Lima, Universidade Federal da Bahia, Brazil, [email protected]O. Ludwig, Universidade de Coimbra, Portugal, [email protected]primer colectivo y de localización para el segundo a través de la interactividad de la red con sus dispositivos móviles. El presente artículo se encuentra organizado como sigue: en la sección II se realiza un resumen del estándar 802.15.4 y sus capas superiores descritas en ZigBee. En la sección III se describe el estudio del campo RSSI y su adaptación para nuestro propósito. En IV se explica el modelado de nuestra red. Finalmente en V se reflejan las conclusiones del estudio. II. REDES DE ÁREA PERSONAL: ZIGBEE Las redes inalámbricas de área personal (WPAN) son redes para interconexión de dispositivos cercanos que habitualmente tienen alcances menores a 10 metros. Entre las redes inalámbricas de este tipo, tenemos la conocida Bluetooth, con tasa de transmisión media, y UltraWideBand, que permite altas tasas de transmisión. Como comentamos en la introducción, para el objetivo del presente estudio nos hemos decantado por utilizar el estándar IEEE 802.15.4 [3], que describe las capas física y MAC de una red inalámbrica de baja tasa de transmisión (LR-WPAN) y, por tanto, de bajo coste. Sus características básicas son: Tasa máxima de transferencia de datos de 250 kbps. 16 canales en la banda de 2.4 GHz. Acceso al canal CSMA/CA. Modulación QPSK, espectro ensanchado DSSS. Comunicación segura: Encriptación AES. Se distinguen dos tipos de nodos en una red 802.15.4 [4]: FFD (Full Function Device): Siempre despierto, conectado a la red eléctrica, actúa como coordinador de red. RFD (Reduced Function Device): Pasa la mayor parte del tiempo en modo mínimo consumo (SLEEP). En cuanto a las topologías permitidas por el estándar; red en estrella, red en árbol, red mallada. En nuestro estudio, hemos optado por una red en estrella en la cual realizaremos una pequeña modificación como veremos en la sección IV. III. ESTUDIO RSSI Nuestra aplicación y estudio se basa en la lectura y posterior tratamiento del campo RSSI contenido en la trama MAC del estándar ZigBee como podemos observar en la Fig. 1, y que nos define la relación entre la potencia transmitida y recibida durante una comunicación inalámbrica, según (1) (1) Length MAC Frame Control Seq. Num FCS RSSI Corr CRC Figura 1. Campo RSSI sobre la trama MAC IEEE 802.15.4 E 1162 IEEE LATIN AMERICA TRANSACTIONS, VOL. 10, NO. 1, JAN. 2012
Transcript
Parking Spaces Detection In Indoor Environments Based On Zigbee
P. Corral, J. A. Pérez, A. C. D. C Lima, Member, IEEE and O. Ludwig
Abstract— This paper describes the study about parking spaces detection in indoor environments, implementing a WSN (Wireless Sensor Network) based on ZigBee technology. Our study focuses on the analysis of the received power when a vehicle is parked or not, by monitoring the RSSI (Received Signal Strength Indicator) field defined in the MAC layer as the IEEE 802.15.4 describes. We focus in the analysis of three factors: data processing time, the influence of distance in received power and the attenuation effect in the signal when propagates, which determine the network topology to deploy and the validity of our location model.
L CAMPO RSSI nos permite evaluar el nivel de potencia de las señales recibidas en redes inalámbricas. Dicho
campo ha sido utilizado habitualmente para el seguimiento de personas u objetos en entornos indoor mediante el análisis de la potencia recibida en contraposición con otros métodos basados en el tiempo o en el ángulo de llegada (TOA [1], AOA [2]).
Nuestro objetivo es aprovechar el campo RSSI para la detección de plazas libres en parkings. Para ello basaremos nuestro estudio en la implementación de una red WSN (Wireless Sensor Network), sobre ZigBee, una especificación comercial basada en el estándar IEEE 802.15.4. La elección de dicho estándar atiende perfectamente a las características requeridas para el despliegue de nuestra red en un entorno indoor como es un parking subterráneo, salvando las lógicas limitaciones de un sistema de localización GPS (las señales GPS no pueden penetrar materiales y, como consecuencia, su uso no está recomendado en entornos indoor), además de permitirnos disponer de prácticamente un número ilimitado de nodos en comparación a otras tecnologías WPAN como Bluetooth, concretamente 65536 nodos ZigBee frente a 8 nodos Bluetooth, contando además con una filosofía de mínimo consumo y mínimo coste.
Por todas estas razones suscritas anteriormente, planteamos un estudio sobre la implantación de una red WSN basada en el estándar ZigBee (IEEE 802.15.4) para la localización y gestión de plazas de aparcamiento libres/ocupadas en aparcamientos públicos subterráneos y el desarrollo de aplicaciones software tanto para la gerencia como para los clientes, ayudando a las tareas de gestión al
primer colectivo y de localización para el segundo a través de la interactividad de la red con sus dispositivos móviles.
El presente artículo se encuentra organizado como sigue: en la sección II se realiza un resumen del estándar 802.15.4 y sus capas superiores descritas en ZigBee. En la sección III se describe el estudio del campo RSSI y su adaptación para nuestro propósito. En IV se explica el modelado de nuestra red. Finalmente en V se reflejan las conclusiones del estudio.
II. REDES DE ÁREA PERSONAL: ZIGBEE
Las redes inalámbricas de área personal (WPAN) son redes para interconexión de dispositivos cercanos que habitualmente tienen alcances menores a 10 metros. Entre las redes inalámbricas de este tipo, tenemos la conocida Bluetooth, con tasa de transmisión media, y UltraWideBand, que permite altas tasas de transmisión.
Como comentamos en la introducción, para el objetivo del presente estudio nos hemos decantado por utilizar el estándar IEEE 802.15.4 [3], que describe las capas física y MAC de una red inalámbrica de baja tasa de transmisión (LR-WPAN) y, por tanto, de bajo coste. Sus características básicas son: Tasa máxima de transferencia de datos de 250 kbps. 16 canales en la banda de 2.4 GHz. Acceso al canal CSMA/CA. Modulación QPSK, espectro ensanchado DSSS. Comunicación segura: Encriptación AES.
Se distinguen dos tipos de nodos en una red 802.15.4 [4]: FFD (Full Function Device): Siempre despierto,
conectado a la red eléctrica, actúa como coordinador de red.
RFD (Reduced Function Device): Pasa la mayor parte del tiempo en modo mínimo consumo (SLEEP).
En cuanto a las topologías permitidas por el estándar; red en estrella, red en árbol, red mallada. En nuestro estudio, hemos optado por una red en estrella en la cual realizaremos una pequeña modificación como veremos en la sección IV.
III. ESTUDIO RSSI
Nuestra aplicación y estudio se basa en la lectura y posterior tratamiento del campo RSSI contenido en la trama MAC del estándar ZigBee como podemos observar en la Fig. 1, y que nos define la relación entre la potencia transmitida y recibida durante una comunicación inalámbrica, según (1)
(1)
Length
MAC Frame Control
Seq. Num
FCS RSSI
Corr
CRC
Figura 1. Campo RSSI sobre la trama MAC IEEE 802.15.4
E
1162 IEEE LATIN AMERICA TRANSACTIONS, VOL. 10, NO. 1, JAN. 2012
Dicho campo se calcula internamente por la antena de los transceptores ubicados en cada uno de los nodos RFD y del coordinador, el cual atiende a la ecuación de transmisión de Friis particularizada para un canal con pérdidas (2):
(2)
Ganancia de la antena transmisora en función de su
orientación respecto de la antena receptora : Ganancia de la antena receptora en función de su orientación
respecto de la antena transmisora. : Longitud de onda. Distancia entre antena emisora y receptora.
: Coeficientes de reflexión de las antena transmisora y receptora respectivamente.
: Vectores de polarización de las antenas transmisoras y receptoras respectivamente.
: Coeficiente de atenuación.
De (2) se deduce que los principales factores que intervendrán a la hora de dilucidar el valor del campo RSSI serán tanto las posiciones y orientación de las antenas transmisoras y receptora, la frecuencia de trabajo y el coeficiente de atenuación. Es fácil de deducir que en el entorno en el que se va a desarrollar nuestro estudio y aplicación, tanto las posiciones como orientaciones de las antenas de los nodos RFD, FFD van a ser fijas, trabajaremos a una frecuencia de 2.4GHz y por lo tanto el único parámetro que influirá a la hora de obtener un valor u otro del campo RSSI va a ser el coeficiente de atenuación.
El coeficiente de atenuación depende de los diferentes materiales que interfieren en el canal de comunicación. En un entorno indoor como un parking subterráneo encontramos diferentes materiales como hormigón en los muros y/o diversos elementos metálicos distribuidos por el recinto los cuales, lógicamente, van a influir en el valor de RSSI.
Nuestro estudio se basa en la caracterización de cada plaza de aparcamiento de forma individualizada. En primer lugar determinamos el alcance de la comunicación entre un nodo RFD y el coordinador en este entorno para obtener la disposición de red idónea. Una vez delimitado este alcance, estudiamos las variaciones producidas en el campo RSSI debida a la atenuación sufrida por la señal al colocar un vehículo, cuya estructura es metálica, entre el nodo situado en la plaza de aparcamiento y el coordinador.
Para obtener una lectura fiable del campo RSSI dadas las condiciones cambiantes del canal de comunicación debemos de elegir un número de transmisiones tal que, al realizar el cálculo del valor medio de la potencia recibida obtengamos una lectura fiable. El criterio elegido para decidir el tamaño de la muestra (stopping criteria) es el denominado método de los lotes [5], que a continuación detallaremos.
Por otra parte, debemos elegir un número de transmisiones tal que el procesamiento de todas ellas no suponga un excesivo tiempo. Esto es, buscaremos un tiempo de procesamiento mínimo sin perder fiabilidad en la lectura.
A. Extracción del campo RSSI
Como se ha descrito anteriormente, el campo RSSI se encuentra contenido en la trama MAC 802.15.4 como se describe en la Fig.1. Concretamente este tipo de trama es una trama ACK ZigBee a nivel MAC 802.15.4, por lo que extraer el campo RSSI no es tan trivial como pudiera parecer.
Veamos en qué consiste dicho procedimiento: 1) El dispositivo RFD envía una trama de datos (no
importa el contenido de los mismos) al dispositivo FFD, en este caso, el coordinador.
2) El coordinador analiza la trama recibida, en la cual se le solicita que le notifique al dispositivo RFD la correcta recepción de la trama de datos. Para ello envía una trama ACK.
3) El dispositivo RFD recibe la trama ACK y extrae el campo RSSI para su posterior tratamiento.
En la Fig.2 se ilustra el procedimiento anteriormente descrito.
Figura 2 Procedimiento de extracción del campo RSSI.
B. El método de los lotes
Consiste en dividir una prueba con un número elevado de transmisiones para una distancia concreta en lotes o paquetes de n muestras. Comenzamos con una n pequeña que iremos aumentando en cada iteración de un bucle. Para cada lote calculamos su media y en cada iteración calculamos la varianza de las medias. Cada vez que aumentamos n en una iteración la varianza entre las medias se irá reduciendo; las medias de dos lotes de 2n muestras se parecerán más entre sí que las medias de dos lotes de n muestras. Cuando consideremos que la media de un lote de un determinado tamaño kn es suficientemente fiable, aplicando un criterio tal que la varianza se vea reducida al 10%, podremos decir que para realizar una estimación fiable de la potencia recibida, serán necesaria kn transmisiones. El procedimiento para llevar a cabo el método es el siguiente:
1. Calcular la media de cada lote (3):
(3)
2. Obtener la media de todos los lotes (4):
3. Calcular la varianza de las medias de todos los lotes (5):
(5)
4. Repetimos el proceso anterior mientras sigamos teniendo al menos dos lotes
Para el estudio del método de los lotes, se ha realizado una interfaz gráfica con la herramienta GUI de Matlab.
CORRAL et al.: PARKING SPACES DETECTION IN INDOOR 1163
1 2 4 8 16 32 64 128 256 512 1024 2048 4096 81920
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2Metodo de los lotes
Tamaño de los lotes
Var
ianz
a
Figura 3. Reducción del número de transmisiones aplicando el método de los lotes.
Realizamos una primera prueba con un gran número de transmisiones (20000), obteniendo una desviación típica aceptable para el entorno en el que nos encontramos, como podemos observar en la Fig.3. Tras aplicar el método de los lotes, observamos que es posible reducir la varianza en más de un 90% para 256 transmisiones, lo cual supone un ahorro considerable en los tiempos de procesado sin perder fiabilidad en la muestra.
C. Tiempos de procesado
Para medir los tiempos de procesado, nos ayudamos de herramientas software que nos permiten determinar el tiempo transcurrido en realizar todas las transmisiones entre el nodo RFD y el Coordinador en cuestión. La medida de dicho tiempo tiene en cuenta el tiempo de propagación de la señal (RTT), y el de análisis de datos (campo RSSI), como se ilustra en (6).
(6)
El tiempo de propagación, RTT (Round-Time Trip), hace referencia al tiempo que tarda la señal en viajar desde el nodo RFD hasta el Coordinador y volver desde que se envió el ultimo byte de la trama MAC y se recibió de nuevo el primer byte como podemos observar en la Fig.4, ya que el coordinador actúa como espejo pues lo tenemos configurado en modo “AutoACK”. El cálculo de RTT atiende a (7), obviando los tiempos de procesamiento de trama y que ya tenemos en cuenta en los tiempos de análisis de datos como hemos descrito en (6).
(7)
d: distancia (metros) nodo RFD-Coordinador. c: velocidad de la luz (m/s)
Como hemos comentado, para el análisis de los tiempos de procesado hemos dispuesto de herramientas software [6].
Concretamente utilizamos las instrucciones TickGet y TickGetDiff. Mediante TickGet obtenemos “instantes” del reloj interno de nuestro procesador (PIC18F4620) y mediante TickGetDiff obtenemos la diferencia entre dos “instantes” de reloj diferentes.
Figura 4. RTT “Nodo RFD-Coordinador”.
El valor devuelto por TickGetDiff depende de las operaciones realizadas por el coordinador. Todas estas operaciones quedan reflejadas en el diagrama de flujo presentado en la Fig.5
Fig.5. Diagrama de flujo Coordinador.
1164 IEEE LATIN AMERICA TRANSACTIONS, VOL. 10, NO. 1, JAN. 2012
Conocido el funcionamiento de nuestras funciones, disponemos de un primer “tick” de reloj al inicio de nuestro código y otro “tick” de reloj al finalizar el procesamiento de todas las transmisiones (de esta forma hemos recogido tanto RTT como Tanálisis datos). Ejecutando a continuación la instrucción TickGetDiff, obtenemos la diferencia de “ticks”, que multiplicamos por el periodo de oscilación del reloj de nuestro procesador:
(8)
Fijando un número de transmisiones igual a 256, realizamos diversas pruebas en las que fuimos variando la distancia que separa el nodo RFD y extrajimos el Tprocesado de los datos. Si calculamos el tiempo medio de procesado, obtenemos , que es un valor aceptable considerando un sistema actualizable cada 5 segundos.
0 1 2 3 4 5 6 7-80
-75
-70
-65
-60
-55
-50
Distancia Nodo RFD-Coordinador(m)
RS
SI(
dBm
)
Figura 6. Influencia de la distancia sobre el nivel RSSI.
D. Influencia de obstáculos en la atenuación de la señal
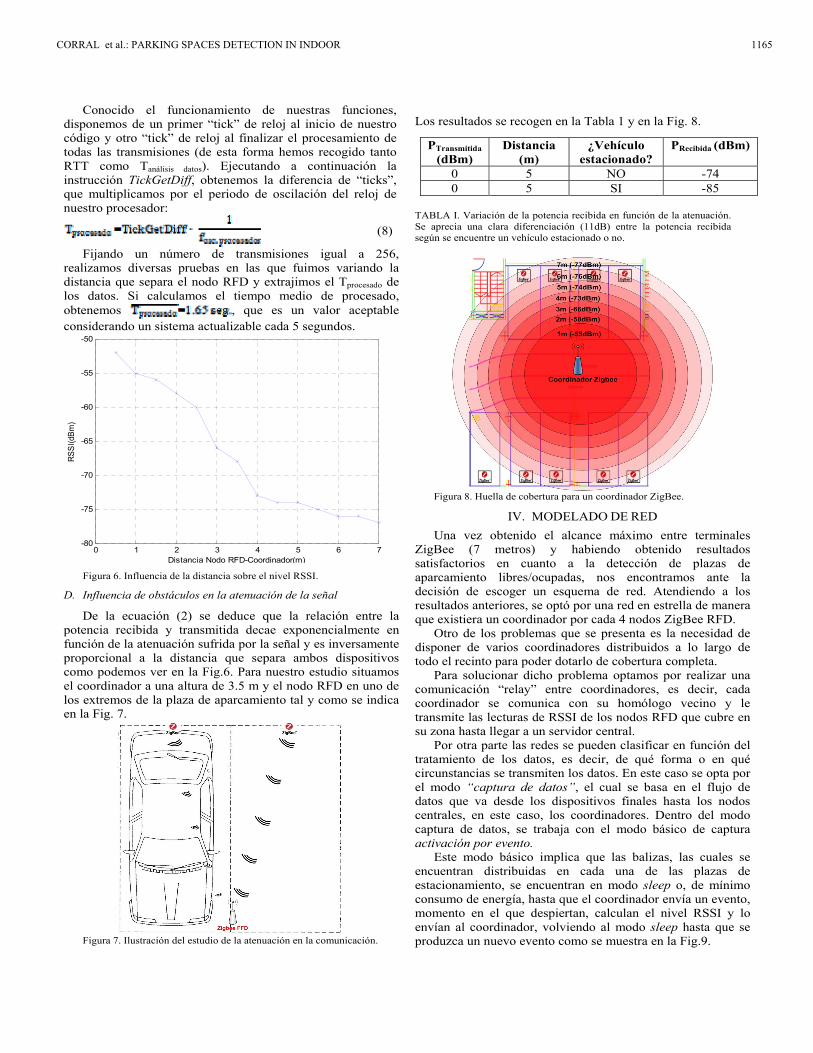
De la ecuación (2) se deduce que la relación entre la potencia recibida y transmitida decae exponencialmente en función de la atenuación sufrida por la señal y es inversamente proporcional a la distancia que separa ambos dispositivos como podemos ver en la Fig.6. Para nuestro estudio situamos el coordinador a una altura de 3.5 m y el nodo RFD en uno de los extremos de la plaza de aparcamiento tal y como se indica en la Fig. 7.
Figura 7. Ilustración del estudio de la atenuación en la comunicación.
Los resultados se recogen en la Tabla 1 y en la Fig. 8.
TABLA I. Variación de la potencia recibida en función de la atenuación. Se aprecia una clara diferenciación (11dB) entre la potencia recibida según se encuentre un vehículo estacionado o no.
Figura 8. Huella de cobertura para un coordinador ZigBee.
IV. MODELADO DE RED
Una vez obtenido el alcance máximo entre terminales ZigBee (7 metros) y habiendo obtenido resultados satisfactorios en cuanto a la detección de plazas de aparcamiento libres/ocupadas, nos encontramos ante la decisión de escoger un esquema de red. Atendiendo a los resultados anteriores, se optó por una red en estrella de manera que existiera un coordinador por cada 4 nodos ZigBee RFD.
Otro de los problemas que se presenta es la necesidad de disponer de varios coordinadores distribuidos a lo largo de todo el recinto para poder dotarlo de cobertura completa.
Para solucionar dicho problema optamos por realizar una comunicación “relay” entre coordinadores, es decir, cada coordinador se comunica con su homólogo vecino y le transmite las lecturas de RSSI de los nodos RFD que cubre en su zona hasta llegar a un servidor central.
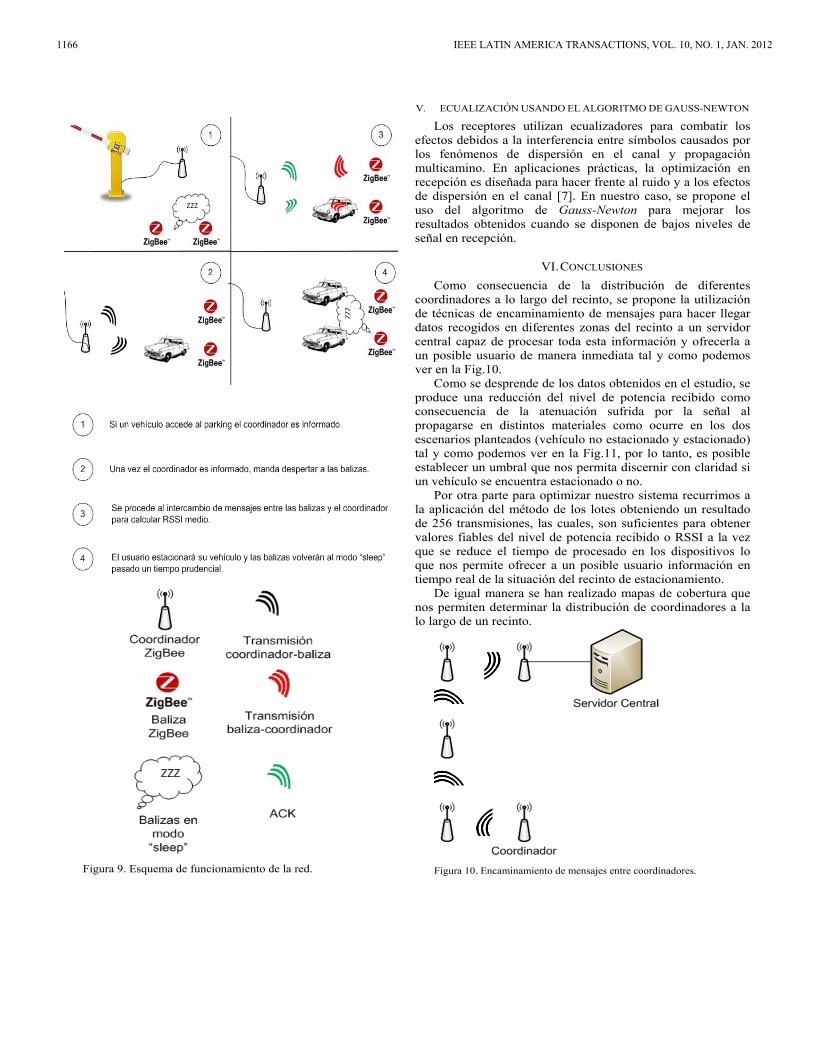
Por otra parte las redes se pueden clasificar en función del tratamiento de los datos, es decir, de qué forma o en qué circunstancias se transmiten los datos. En este caso se opta por el modo “captura de datos”, el cual se basa en el flujo de datos que va desde los dispositivos finales hasta los nodos centrales, en este caso, los coordinadores. Dentro del modo captura de datos, se trabaja con el modo básico de captura activación por evento.
Este modo básico implica que las balizas, las cuales se encuentran distribuidas en cada una de las plazas de estacionamiento, se encuentran en modo sleep o, de mínimo consumo de energía, hasta que el coordinador envía un evento, momento en el que despiertan, calculan el nivel RSSI y lo envían al coordinador, volviendo al modo sleep hasta que se produzca un nuevo evento como se muestra en la Fig.9.
PTransmitida (dBm)
Distancia (m)
¿Vehículo estacionado?
PRecibida (dBm)
0 5 NO -74 0 5 SI -85
CORRAL et al.: PARKING SPACES DETECTION IN INDOOR 1165
Figura 9. Esquema de funcionamiento de la red.
V. ECUALIZACIÓN USANDO EL ALGORITMO DE GAUSS-NEWTON
Los receptores utilizan ecualizadores para combatir los efectos debidos a la interferencia entre símbolos causados por los fenómenos de dispersión en el canal y propagación multicamino. En aplicaciones prácticas, la optimización en recepción es diseñada para hacer frente al ruido y a los efectos de dispersión en el canal [7]. En nuestro caso, se propone el uso del algoritmo de Gauss-Newton para mejorar los resultados obtenidos cuando se disponen de bajos niveles de señal en recepción.
VI. CONCLUSIONES
Como consecuencia de la distribución de diferentes coordinadores a lo largo del recinto, se propone la utilización de técnicas de encaminamiento de mensajes para hacer llegar datos recogidos en diferentes zonas del recinto a un servidor central capaz de procesar toda esta información y ofrecerla a un posible usuario de manera inmediata tal y como podemos ver en la Fig.10.
Como se desprende de los datos obtenidos en el estudio, se produce una reducción del nivel de potencia recibido como consecuencia de la atenuación sufrida por la señal al propagarse en distintos materiales como ocurre en los dos escenarios planteados (vehículo no estacionado y estacionado) tal y como podemos ver en la Fig.11, por lo tanto, es posible establecer un umbral que nos permita discernir con claridad si un vehículo se encuentra estacionado o no.
Por otra parte para optimizar nuestro sistema recurrimos a la aplicación del método de los lotes obteniendo un resultado de 256 transmisiones, las cuales, son suficientes para obtener valores fiables del nivel de potencia recibido o RSSI a la vez que se reduce el tiempo de procesado en los dispositivos lo que nos permite ofrecer a un posible usuario información en tiempo real de la situación del recinto de estacionamiento.
De igual manera se han realizado mapas de cobertura que nos permiten determinar la distribución de coordinadores a la lo largo de un recinto.
Figura 10. Encaminamiento de mensajes entre coordinadores.
1166 IEEE LATIN AMERICA TRANSACTIONS, VOL. 10, NO. 1, JAN. 2012
Figura 11. Escenario (a): La señal ZigBee apenas sufre atenuación al no propagarse a través de un obstáculo. Escenario (b): La señal ZigBee se atenúa al propagarse a través de un vehículo.
Por todo ello, se concluye que se ha conseguido implementar un sistema en tiempo real capaz de detectar plazas de aparcamiento disponible en un entorno indoor subterráneo mediante el estudio de la potencia recibida o el campo RSSI contenido en la trama ACK a nivel MAC 802.15.4 en función de la atenuación sufrida por la señal al encontrarse un obstáculo o no en su propagación entre dos terminales ZigBee.
REFERENCIAS
[1] Zafer Sahinoglu“Improving Range Accuracy of IEEE 802.15.4a Radios In the Presence of Clock Frequency Offsets” IEEE Communications Letters, Vol. 15, No. 2, February 2011. [2] ChulYoung Park et al. “Localization Algorithm Design and Implementation to Utilization RSSI and AOA of ZigBee” 5th International Conference on Future Information Technology (FutureTech), 2010. [3] L. F. Silva et al. “Mobility Impact on IEEE 802.15.4 Network through a Simulation Platform” IEEE Latin America Transactions, Sept. 2011, Volume: 9 , Issue:5, pp. 655 – 662. [4] Masaya Araiet al. “Estimation of ZigBee’s RSSI fluctuated by Crowd Behavior in Indoor Space”SICE Annual Conference 2010. [5] Raj, Jain, “Art of Computer Systems Performance Analysis Techniques for Experimental Design Measurements Simulation and Modeling”, Wiley Computer Publishing, John Wiley & Sons, Inc, pp.442-449, Enero 1991. [6] MPLAB C18 Compiler. Microchip Technology 2007. [7] P. Corral et al. “Time-varying channel neural equalisation using Gauss-Newton algorithm” ELECTRONICS LETTERS 22nd July 2010 Vol. 46 No. 15.
Pablo Corral es profesor colaborador de la Universidad Miguel Hernandez. Su investigación se centra en la mejora de recepción de señal en redes inalámbricas aplicando técnicas de filtrado y diversidad en entornos críticos, así como en aplicaciones para localización y seguimiento basados en WPAN y WLAN.
Jose Antonio Pérez es asesor de sistemas junior dentro de un equipo multidisciplinar en una empresa de consultoría a nivel global. Cuenta con experiencia en redes inalámbricas en entornos de movilidad.
A. C. de C. Lima es Profesor Asociado tipo II de la Universidad Federal de Bahia. Tiene experiencia en el área de Ingeniería Eléctrica, con énfásis en Eletromagnetismo Aplicado, Sistemas de Comunicación y Procesamiento Digital de Señales, actuando principalmente en los siguientes temas: Sistemas Embarcados, Redes Neuronales Artificiales y Ecualización Adaptativa.
Oswaldo Ludwig Junior es investigador en el Instituto de Sistemas y Robótica de la Universidad de Coimbra. Su investigación actual se centra en las máquinas de aprendizaje con una aplicación para detección de peatones en el dominio de los vehículos inteligentes.
CORRAL et al.: PARKING SPACES DETECTION IN INDOOR 1167