26
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 1 Physics 141. Lecture 18.

Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 1
Physics 141.Lecture 18.

Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 2
Physics 141.Lecture 18.
• Course Information.
• Topics to be discussed today:
• A quick review of rotational variables, kinetic energy, and torque.
• Rolling motion.
• Angular Momentum.

Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 3
Physics 141.Course information.
• Homework set # 8 is due on Friday November 11.
• Laboratory:• Laboratory report # 4 is due on Wednesday 11/9 at noon (to be
dropped of in the Laboratory locker for Physics 141).• Laboratory experiment # 5 is scheduled for Monday November 14.
The experiment will be carried out in the May room in WilsonCommons. More details on the next slides.

Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 4
Lab # 5, November 14.Collisions!
Total number of collisions = 46 - 69.Number of collisions per student = 2 - 3
Please drink your soda and rinse your cans!

Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 5
One way to deal with soda.Physics 141 Fall 2012.

Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 6
Analysis of experiment # 5.Timeline (more details during next lectures).
• 11/14: collisions in the May room• 11/20: analysis files available.• 11/21: each student has determined his/her best
estimate of the velocities before and after thecollisions (analysis during regular lab periods).
• 11/23: complete discussion and comparison ofresults with colliding partners and submit finalresults (velocities and errors) to professorWolfs.
• 11/25: professor Wolfs compiles results,determines momenta and kinetic energies, anddistributes the results.
• 11/28: office hours by lab TA/TIs to help withanalysis and conclusions.
• 12/2: students submit lab report # 5.

Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 7
Rotational variables.A quick review.
• The variables that are used todescribe rotational motion are:
• Angular position θ
• Angular velocity ω = dθ/dt
• Angular acceleration α = dω/dt
• The rotational variables arerelated to the linear variables:
• Linear position l = Rθ
• Linear velocity v = Rω
• Linear acceleration a = Rα

Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 8
The moment of inertia.A quick review.
• The kinetic energy of a rotationbody is equal to
where I is the moment of inertia.• For discrete mass distributions I
is defined as
• For continuous mass distributionsI is defined as
I = miri
2
i∑
I = r 2dm∫
K =
12
Iω 2
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 9
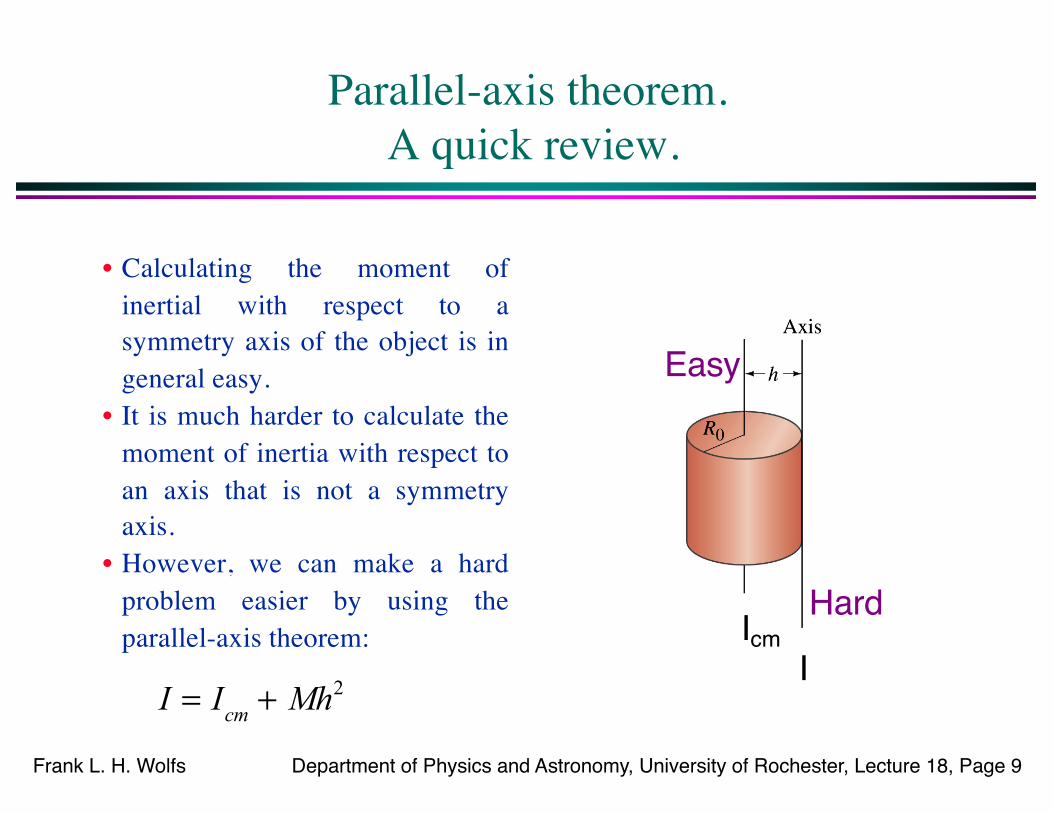
Parallel-axis theorem.A quick review.
• Calculating the moment ofinertial with respect to asymmetry axis of the object is ingeneral easy.
• It is much harder to calculate themoment of inertia with respect toan axis that is not a symmetryaxis.
• However, we can make a hardproblem easier by using theparallel-axis theorem:
Easy
HardIcm
I I = Icm + Mh2
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 10
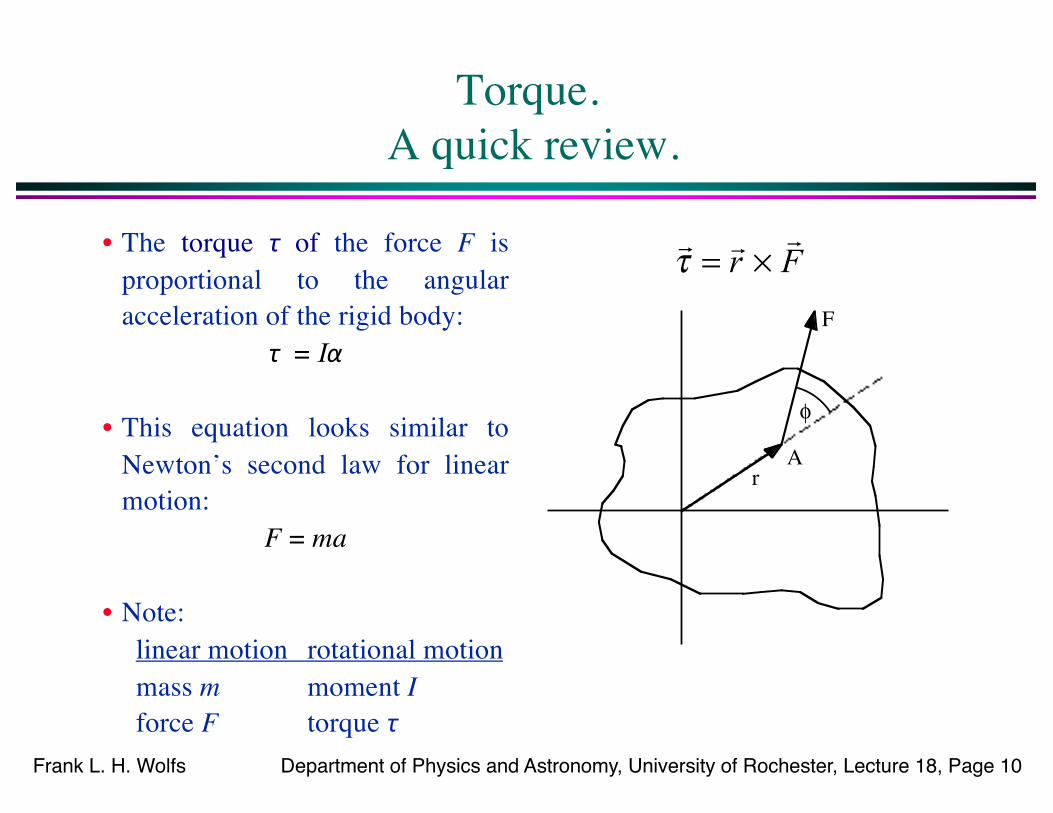
Torque.A quick review.
• The torque τ of the force F isproportional to the angularacceleration of the rigid body:
τ = Iα
• This equation looks similar toNewton’s second law for linearmotion:
F = ma
• Note:linear motion rotational motionmass m moment Iforce F torque τ
Ar
φ
F
τ = r ×
F

Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 11
Torque.A quick review.
• The torque associated with aforce is a vector. It has amagnitude and a direction.
• The direction of the torque can befound by using the right-handrule to evaluate r x F.
• The direction of the torque is thedirection of the angularacceleration.
• For extended objects, the totaltorque is equal to the vector sumof the torque associated with each“component” of this object.

Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 12
Rolling motion.
• Rolling motion is a combination oftranslational and rotational motion.
• The kinetic energy of rolling motionhas thus two contributions:
• Translational kinetic energy:
• Rotational kinetic energy:
• Assuming that the wheel does notslip we know that
Ktranslational =
12
Mvcm2
Krotational =
12
Icmω2
ω =
vcm
R

Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 13
Rolling motion.

Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 14
Rolling motion.
• Consider two objects of the samemass but different moments ofinertia, released from rest fromthe top of an inclined plane:
• Both objects have the same initialmechanical energy (assumingtheir CM is located at the sameheight).
• At the bottom of the inclinedplane they will have bothrotational and translational kineticenergy.
• Which object will reach thebottom first?
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 15
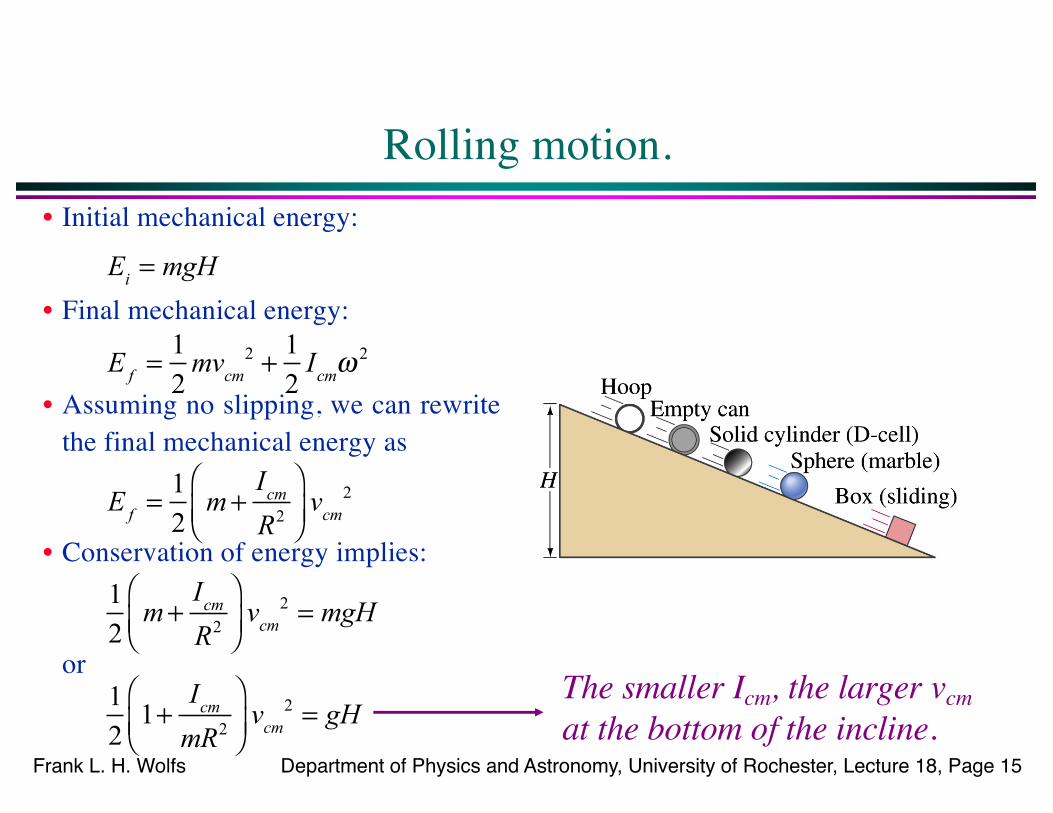
Rolling motion.• Initial mechanical energy:
• Final mechanical energy:
• Assuming no slipping, we can rewritethe final mechanical energy as
• Conservation of energy implies:
orThe smaller Icm, the larger vcmat the bottom of the incline.
Ei = mgH
E f =
12
mvcm2 + 1
2Icmω
2
E f =
12
m+Icm
R2
⎛
⎝⎜⎞
⎠⎟vcm
2
12
m+Icm
R2
⎛
⎝⎜⎞
⎠⎟vcm
2 = mgH
12
1+Icm
mR2
⎛
⎝⎜⎞
⎠⎟vcm
2 = gH

Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 16
8 Minute 35 Second Intermission.Please come forward and pick up your soda.
• Since paying attention for 1 hourand 15 minutes is hard when thetopic is physics, let’s take a 8minute 35 second intermission.
• You can:• Stretch out.• Talk to your neighbors.• Ask me a quick question.• Enjoy the fantastic music.• Solve a WeBWorK problem.
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 17
Physics 141.Concept test.
• Let us practice what we havelearned so far.
• This test allows me to assess yourunderstanding of the material, butwill not be effect your Physics141 grade.
• Your PRS will be used to enteryour answers.

Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 18
How different is a world with rotational motion?
• Consider the loop-to-loop. Whatheight h is required to make it tothe top of the loop?
• First consider the case withoutrotation:
• Initial mechanical energy = mgh.• Minimum velocity at the top of
the loop is determined byrequiring that
mv2/R > mgor
v2 > gR• The mechanical energy is satisfy
the following condition:(1/2)mv2 + 2mgR > (5/2)mgR
• Conservation of energy requiresh > (5/2)R
h R
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 19
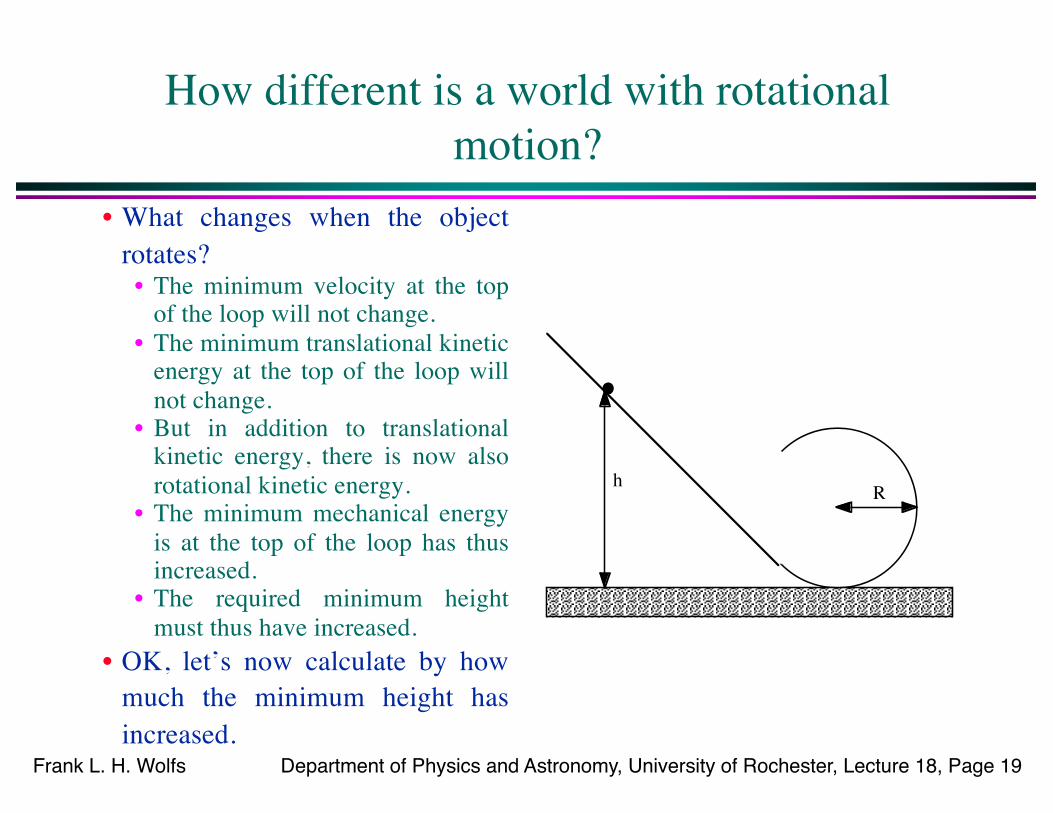
How different is a world with rotational motion?
• What changes when the objectrotates?
• The minimum velocity at the topof the loop will not change.
• The minimum translational kineticenergy at the top of the loop willnot change.
• But in addition to translationalkinetic energy, there is now alsorotational kinetic energy.
• The minimum mechanical energyis at the top of the loop has thusincreased.
• The required minimum heightmust thus have increased.
• OK, let’s now calculate by howmuch the minimum height hasincreased.
h R

Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 20
Note: without rotation h ≥ 25/10 R !!!
K f =
12
Iω 2 +12
mv2 =12
Ir 2 + m
⎛⎝⎜
⎞⎠⎟
v2
K f =
12
25
m + m⎛⎝⎜
⎞⎠⎟
v2 =7
10mv2
How different is a world with rotational motion?
• The total kinetic energy at the top ofthe loop is equal to
• This expression can be rewritten as
• We now know the minimummechanical energy required to reachthis point and thus the minimumheight:
h R
h ≥
2710
R

Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 21
Angular momentum.Definition.
• We have seen many similaritiesbetween the way in which wedescribe linear and rotational motion.
• Rotational motion can be treated insimilar fashion as linear motion:
linear motion rotational motionmass m moment Iforce F torque τ = r x F
• What is the equivalent to linearmomentum? Answer: angularmomentum L = r x p.

Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 22
Angular momentum.Definition.
• The angular momentum isdefined as the vector productbetween the position vector andthe linear momentum.
• Note:• Compare this definition with the
definition of the torque.• Angular momentum is a vector.• The unit of angular momentum is
kg m2/s.• The angular momentum depends
on both the magnitude and thedirection of the position and linearmomentum vectors.
• Under certain circumstances theangular momentum of a system isconserved!

Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 23
Angular momentum.Circular motion.
• Consider an object carrying outcircular motion.
• For this type of motion, the positionvector will be perpendicular to themomentum vector.
• The magnitude of the angularmomentum is equal to the productof the magnitude of the radius r andthe linear momentum p:
L = mvr = mr2(v/r) = Iω
• Note: compare this with p = mv!

Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 24
Angular momentum.Linear motion.
• An object does not need to carryout rotational motion to have anangular moment.
• Consider a particle P carrying outlinear motion in the xy plane.
• The angular momentum of P(with respect to the origin) isequal to
and will be constant (if the linearmomentum is constant).
P
θ
p
r
y-axis
x-axisr⊥
L = r × p = mrv sinθ z =
= mvr⊥ z = pr⊥ z

Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 25
Conservation of angular momentum.
• Consider the change in the angular momentum of a particle:
• When the net torque is equal to 0 Nm:
• When we take the sum of all torques, the torques due to theinternal forces cancel and the sum is equal to torque due toall external forces.
dL
dt=
ddtr × p( ) = m r ×
dvdt
+drdt
× v⎛⎝⎜
⎞⎠⎟= m r × a + v × v( ) =
= r × ma = r ×F∑ =
τ∑
τ∑ = 0 =
dL
dt⇒L = constant
Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 26
Done for today!



![[1] 1 2 5 6 15 a 15 a Q) ¥33, ¥33, 000. - 000. - 000. - 15 14 29 04 51 16 53 53 00 17 50 56 08 50 00 40 15 46 09 18 00 09 35 141 141 141 141 141 141 141 141 141 141 141 141 54 49](https://static.documents.pub/doc/80x56/5f09a6d27e708231d427dc4e/1-1-2-5-6-15-a-15-a-q-33-33-000-000-000-15-14-29-04-51-16-53-53.jpg)













