37
Placement and Partitioning ELEC 5402 Pavan Gunupudi Dept. of Electronics, Carleton University January 16, 2012 1 / 37
Placement andPartitioning
ELEC 5402
Pavan Gunupudi
Dept. of Electronics, Carleton University
January 16, 2012
1 / 37

Placement
• Follows synthesis (and verification)
• Placement is done such that:
• No overlap• Chip area is minimal• Sufficient space left for wiring
2 / 37

Partitioning
• Split network into 2 or more parts by cuttinginterconnections.
• Number of interconnections severed should be minimal.
• Partitioning is used in some algorithms to performplacement
3 / 37

Placement
S
R
RS Latch
g2
g1
Output terminalsInput terminals
Q
Q
• Data model of the circuit has:
• Cell (nand)• Port (S, R, Q, Q)• Net (wires)
• Details of cell present in library
4 / 37

Cell-Port-Net
g2
g1Q
Q
n1
n2 n4
n3
S
R
5 / 37

Tripartite Graph
g2
g1n1
n2 n4
n3
S
R Q
Q
6 / 37
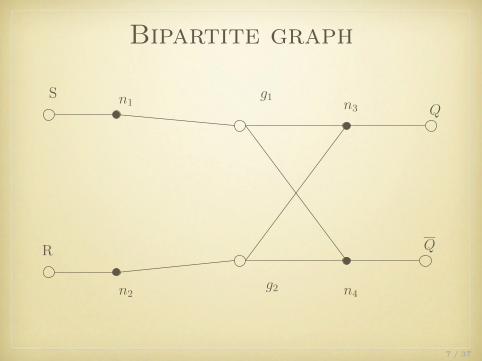
Bipartite graph
g2
g1n1
n2 n4
n3
S
R Q
Q
7 / 37
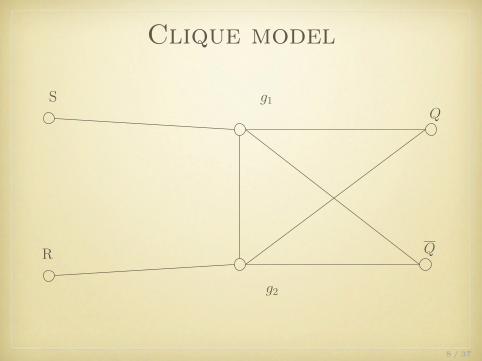
Clique model
g2
g1S
R Q
Q
8 / 37
Wire Length Estimation
• Wire length metric: a measure to estimate wire lengths
• This metric is a criteria for placement (instead of area)
• Different Estimates
• Half Perimeter• Minimum rectilinear spanning tree• Squared Euclidean Distance
• Estimates are used since routing is not yet performed
9 / 37
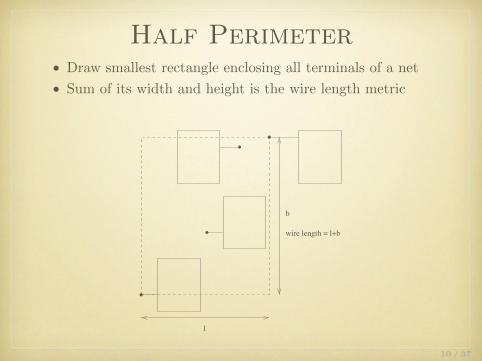
Half Perimeter• Draw smallest rectangle enclosing all terminals of a net
• Sum of its width and height is the wire length metric
l
b
wire length = l+b
10 / 37

Minimum rectilinearspanning tree
• Distance between (x1, y1) and (x2, y2) computed by:• |x1 − x2|+ |y1 − y2| or
• Eucledian distance: ((x1 − x2)2 + (y1 − y2)2)12
11 / 37

Squared Euclidean Distance
• Used for clique models
• Metric:1
2
n∑i=1
n∑j=1
γij [(xi − xj)2 + (yi − yj)2]
• (xi, yj) are the coordinates of the cells, γij is the weightcorresponding to the edges between vertices vi and vj .
• Summation is done over cells, not nets
12 / 37

Standard Cell PlacementClock, power etc
"abut" horizontally
Clock, power etc
All stdcells might not be of same size
13 / 37

Building-Block Placement
• Arbitrary shapes and sizes; general cell layout
14 / 37
Placement Algorithms
• Constructive placement (partitioning methods)
• min-cut partitioning• Clustering
• Iterative improvement
• Perturb-Check-Accept/Repeat
15 / 37
Min-cut Partitioning
• Partition the circuit into two halves such that connectionsbetween the two are minimized
• When nets between two partitions are minimized, thisalgorithm assumes that the “number of long wires crossingfrom one partition to the other are also minimized”
• Repeat partitioning until each partition contains one cell.
16 / 37

Min-cut Partitioning
A B
C D
A B
C D
A B
C D
A B
CD
A
D
C
B
A C
DB
17 / 37

Clustering
• Start with one cell and finds the cells that share many nets
• Form cluster with these cells
• Find another cell that shares many nets with this cluster
• Add this to the cluster
• Repeat until all cells are added to the cluster
18 / 37

Clustering
A B
C D
A B
C D
A B
C D
A B
C D
A A C
A C
B
A C
B D
19 / 37

Iterative Improvement
• Given a certain placement, it is perturbed
• Reevaluate cost function of the placement
• Accept if cost function is better
• Else, optionally discard the perturbed-placement
• Optionally – to avoid local minima and get to global minima
• Generate another perturbation and repeat
• Stop when cost function is good enough
• Similar to general purpose optimization techniques
20 / 37

How To Perturb?
• Main issue is overlap
• Include overlap in cost function along with wire length
• Remove remaining overlap by “pulling apart” cells
• Shift cells after every perturbation
• Computationally intensive for building-block placement• Suitable for standard cells• For standard cells at most half the cells shift
• Store relative positions only
• Free from overlap• Computationally intensive
• Force-directed placement
21 / 37

Force-Directed Placement• Assume cells that share nets feel an “attractive force”
• Calculate centre of gravity of each cell where it experiencesno net force
• Idea: bring all cells towards their centre of gravity
• Centre of gravity (xgi , ygi ) of a cell i is
xgi =
∑j γijxj∑j γij
; ygi =
∑j γijyj∑j γij
• γij is weight of edge (vi, vj) ∈ E• γij = 0 when (vi, vj) /∈ E
• The centre of gravity is calculated for all cells
• Perturbation: move each cell towards its centre of gravity
• If another cell is in place, move it away to an empty spot ortowards its centre of gravity
• Creates chain of moves
22 / 37

Partitioning
• Goal: Split network into 2 or more parts by cuttinginterconnections.
• Number of interconnections severed should be minimal.
• Many algorithms exist to perform partitioning
• One of the famous algorithms is Kernighan and Lin (1970)which we shall study
23 / 37
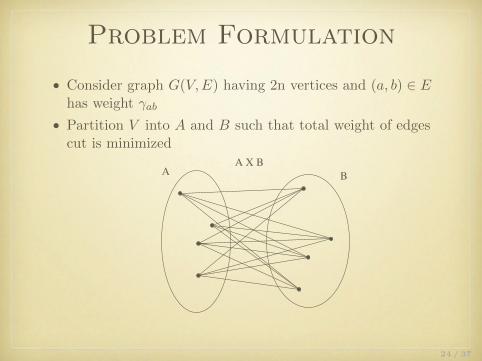
Problem Formulation
• Consider graph G(V,E) having 2n vertices and (a, b) ∈ Ehas weight γab
• Partition V into A and B such that total weight of edgescut is minimized
A BA X B
24 / 37
Mathematical Formulation
• Find 2 sets A,B such that A ∪B = V and A ∩B = φ and|A| = |B| = n which minimizes the total cost defined by∑
(a,b)∈A×B γab, where |X| denotes the number if vertices inX.
• This is an NP-complete problem
• The K & L algorithm is a heuristic, and a pretty good one
25 / 37

K & L Algorithm• Choose a random partitioning,
Set of some vertices
Interchange the vertices
A0 B0
X YVA
B
A1 B1
Y X
26 / 37
K & L Algorithm
• If you know exactly which vertices to change, then theproblem can be solved in one iteration
• We don’t know the vertices to swap
• Since the problem is NP-complete
• So we iterate; each iteration is called a pass
• Generally 4 passes are required for the K & L algorithmowing to good heuristics
27 / 37

K & L Pass
• A pass can be represented as:
Am = (Am−1\Xm) ∪ Y m
Bm = (Bm−1\Y m) ∪Xm
• where A\X represents the set where X is removed from A
• Construction of Xm and Y m is based in external andinternal costs of vertices in Am−1 and Bm−1
28 / 37

External Cost
• External cost Ea of a vertex a ∈ Am−1 is
Ea =∑
y∈Bm−1
γay, a ∈ Am−1
• Ea is the measure of pull of vertex a from vertices in Bm−1
• External cost Eb of a vertex b ∈ Bm−1 (measure of pull ofvertex b from vertices in Am−1) is
Eb =∑
x∈Am−1
γbx, b ∈ Bm−1
29 / 37

Internal Cost
• Internal costs, Ia and Ib representing the internal pullswithin Am−1 and Bm−1 can be defined
Ia =∑
x∈Am−1
γax; a ∈ Am−1
Ib =∑
y∈Bm−1
γby; b ∈ Bm−1
30 / 37

Desirability to Move
• DefineDa = Ea − Ia, a ∈ Am−1
Db = Eb − Ib, b ∈ Bm−1
• Da gives an indication of the desirability to move thevertex a
• Db gives an indication of the desirability to move thevertex b
• Define∆ = Da +Db − 2γab, a ∈ Am−1
• ∆ indicates the gain in cut cost due to a swap betweenvertices a and b from Am−1 and Bm−1
31 / 37

K & L Algorithm (steps)1 Compute Da and Db for all a ∈ Am−1, so we get{Da1 , Da2 , . . . , Dan} and {Db1 , Db2 , . . . , Dbn}
2 Find (ai, bi) (edges in the cut) that are unlocked such that
∆i = Dai +Dbi − 2γaibi
is maximal. Lock ai, bi and store ∆i
3 Simulate for other elements in Am−1 and Bm−1 that ai andbi have been interchanged
• For unlocked vertices in Am−1
Dx = Dx + 2γxai− 2γxbi
• For unlocked vertices in Bm−1
Dy = Dy − 2γyai + 2γybi
4 Goto step 3 and repeat until all vertices are locked
32 / 37

K & L Algorithm (steps)
4 Find a k such that G =∑k
i=1 ∆i is maximal• Set of vertices that need to be swapped correspond to the
vertices that were locked in calculating ∆1, . . . ,∆k
5 Form sets Xm and Y m and swap
6 Goto step 1 and iterate as long as overall cut-cost G > 0
• Time complexity of this algorithm is O(n3)
• By sorting elements in Am and Bm, this can be broughtdown to O(n2 log n)
33 / 37
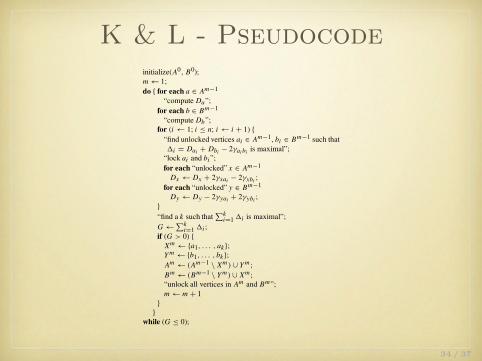
K & L - Pseudocodeinitialize(A0 , B0);
m← 1;
do { for each a ∈ Am−1
“compute Da”;
for each b ∈ Bm−1
“compute Db”;
for (i ← 1; i ≤ n; i ← i + 1) {
“find unlocked vertices ai ∈ Am−1, bi ∈ Bm−1 such that
1i = Dai + Dbi− 2γai bi
is maximal”;
“lock ai and bi”;
for each “unlocked” x ∈ Am−1
Dx ← Dx + 2γxai − 2γxbi;
for each “unlocked” y ∈ Bm−1
Dy ← Dy − 2γyai + 2γybi;
}
“find a k such that∑k
i=1 1i is maximal”;
G←∑k
i=1 1i ;
if (G > 0) {
Xm ← {a1, . . . , ak};
Y m ← {b1, . . . , bk};
Am ← (Am−1 \ Xm ) ∪ Y m ;
Bm← (Bm−1 \ Y m) ∪ Xm ;
“unlock all vertices in Am and Bm”;
m← m + 1
}
}
while (G ≤ 0);
34 / 37

K & L algorithm - Example
5 15 1
1 1 2
1 1
2 1 3
v2
v4 v5
v7v6v3
v8v1
A0 B0
i v2 v3 v6 v7 v1 v4 v5 v8 ∆i
1 5 3 -1 -1 3 3 -1 -3 62 -5 -1 -1 -3 -1 -1 -23 -5 1 -3 3 24 -3 -3 -6
• G =∑k
i=1 ∆i is maximal for k = 1 and 3. Let’s select k = 1• Hence {v2} and {v4} are interchanged
35 / 37

K & L algorithm - Example
5 15 1
1 1 2
1 1
2 1 3 v8v4 v5
v7v6v2 v3
v1
A0 B0
i v3 v4 v6 v7 v1 v2 v5 v8 ∆i
1 -5 -1 -1 -1 -3 -3 -1 -1 -22 5 -3 -3 -7 -5 3 83 -3 -3 -7 -7 -104 1 3 4
• G =∑k
i=1 ∆i is maximal for k = 2• Hence {v3, v4} and {v5, v8} are interchanged
36 / 37

K & L algorithm - Example
5 15 1
1 1 2
1 1
2 1 3 v8v4 v5
v7v6v2 v3
v1
37 / 37

















