56
GENERATOR CONTROL AND PROTECTION Power System Stability
GENERATOR CONTROL AND PROTECTION
Power System Stability
GENERATOR CONTROL AND PROTECTION
Outline
• Basis for Steady-State Stability
• Transient Stability
• Effect of Excitation System on Stability
• Small Signal Stability
• Power System Stabilizers
– Speed Based
– Integral of Accelerating Power
• Case Studies
GENERATOR CONTROL AND PROTECTION
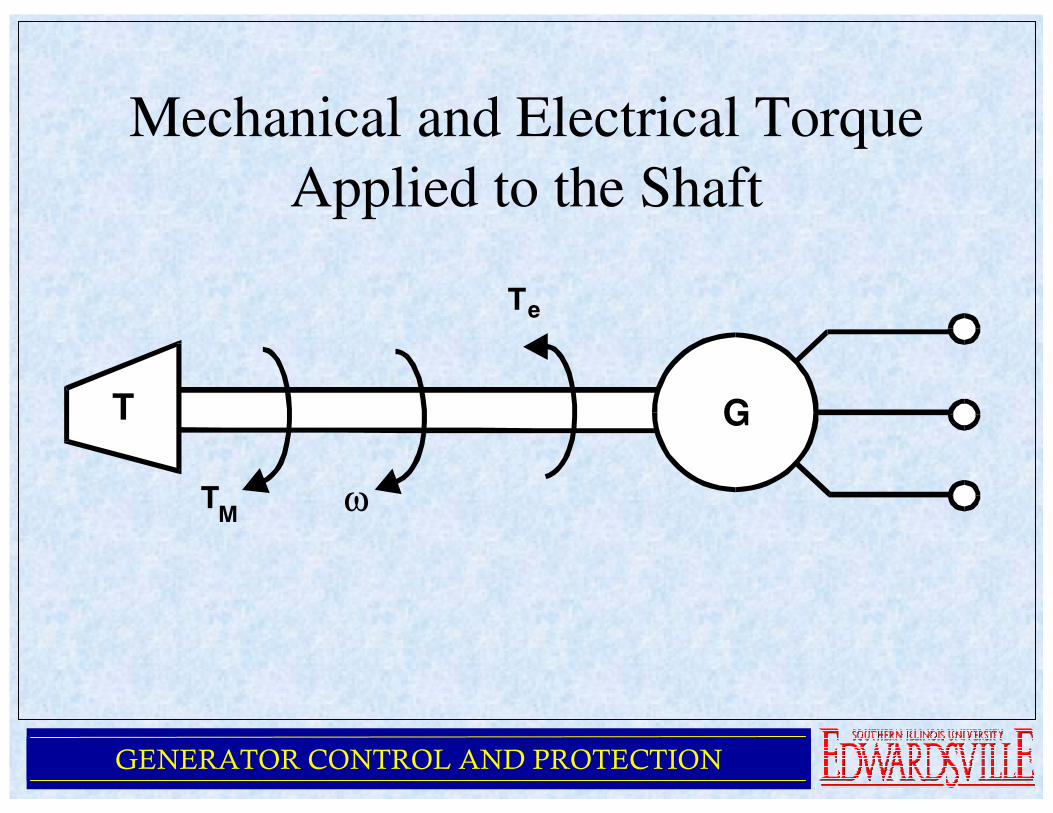
Mechanical and Electrical Torque
Applied to the Shaft
T
T
M
e
T
ω
G
GENERATOR CONTROL AND PROTECTION
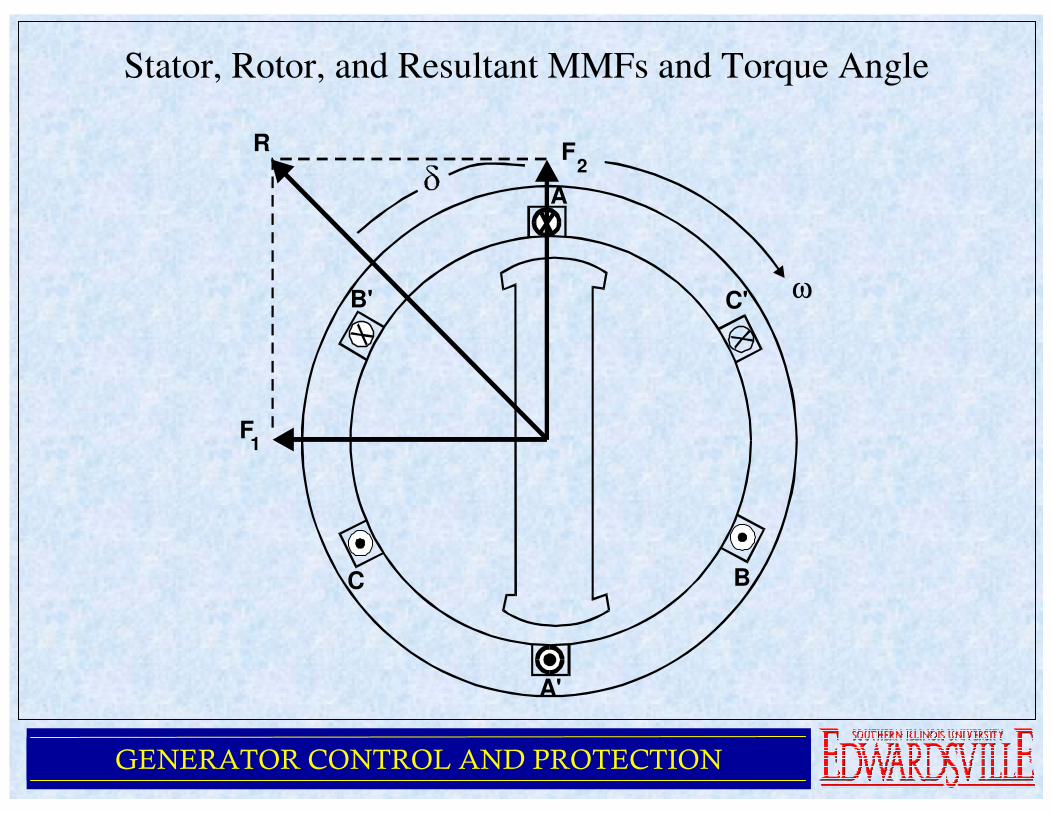
Stator, Rotor, and Resultant MMFs and Torque Angle
F
A
A'
B'
B
C'
C
F
R2
1
ω
GENERATOR CONTROL AND PROTECTION
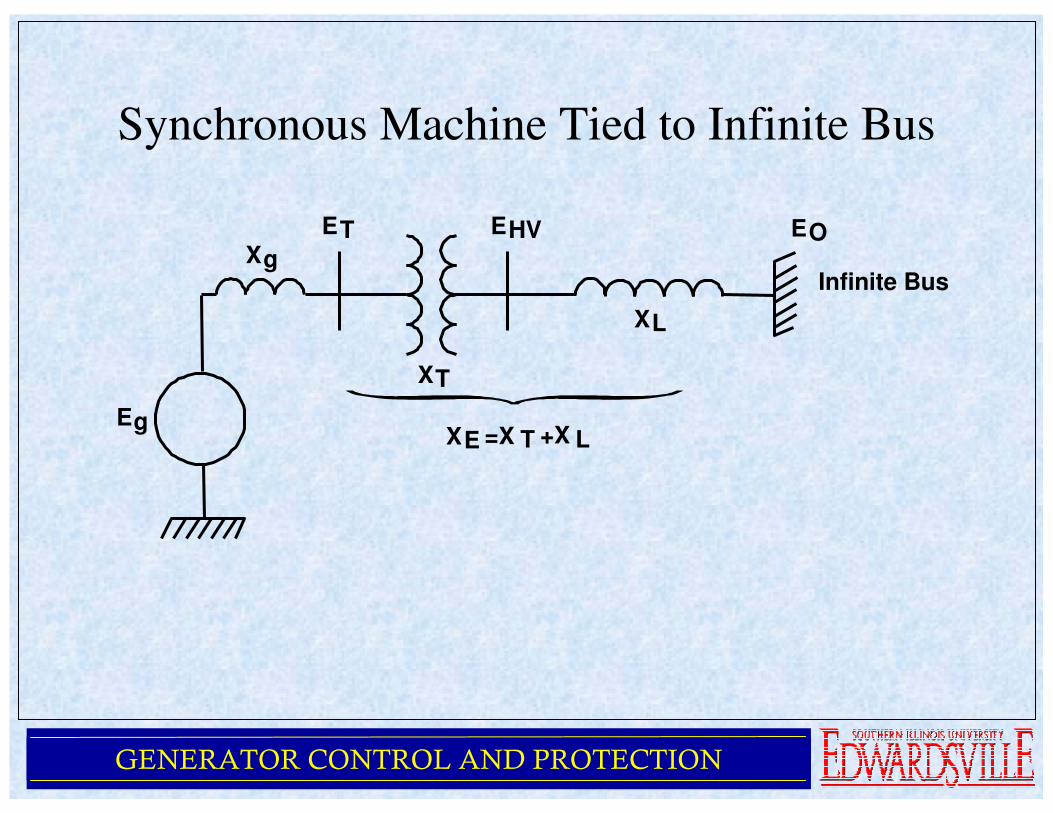
Synchronous Machine Tied to Infinite Bus
XL
X
E
E
XEE
T
+XX LE =X T
T
g
gOHV
Infinite Bus
GENERATOR CONTROL AND PROTECTION
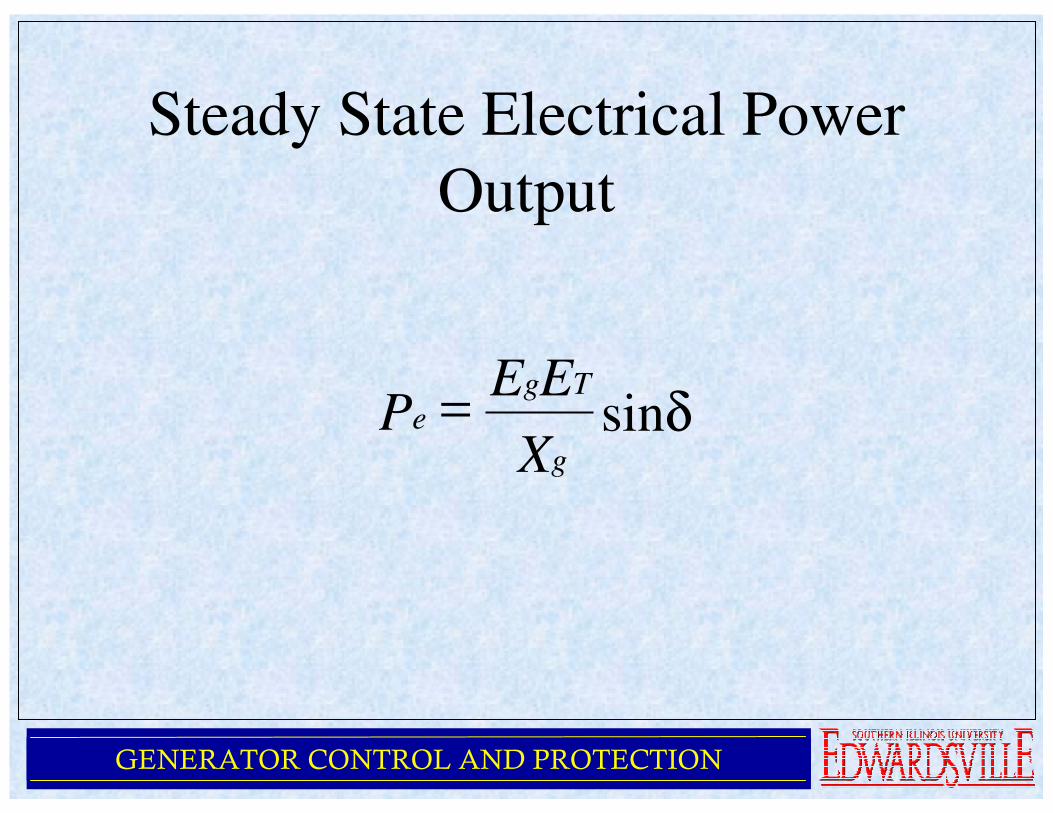
Steady State Electrical Power
Output
PE E
Xe
g T
g
= sinδ
GENERATOR CONTROL AND PROTECTION
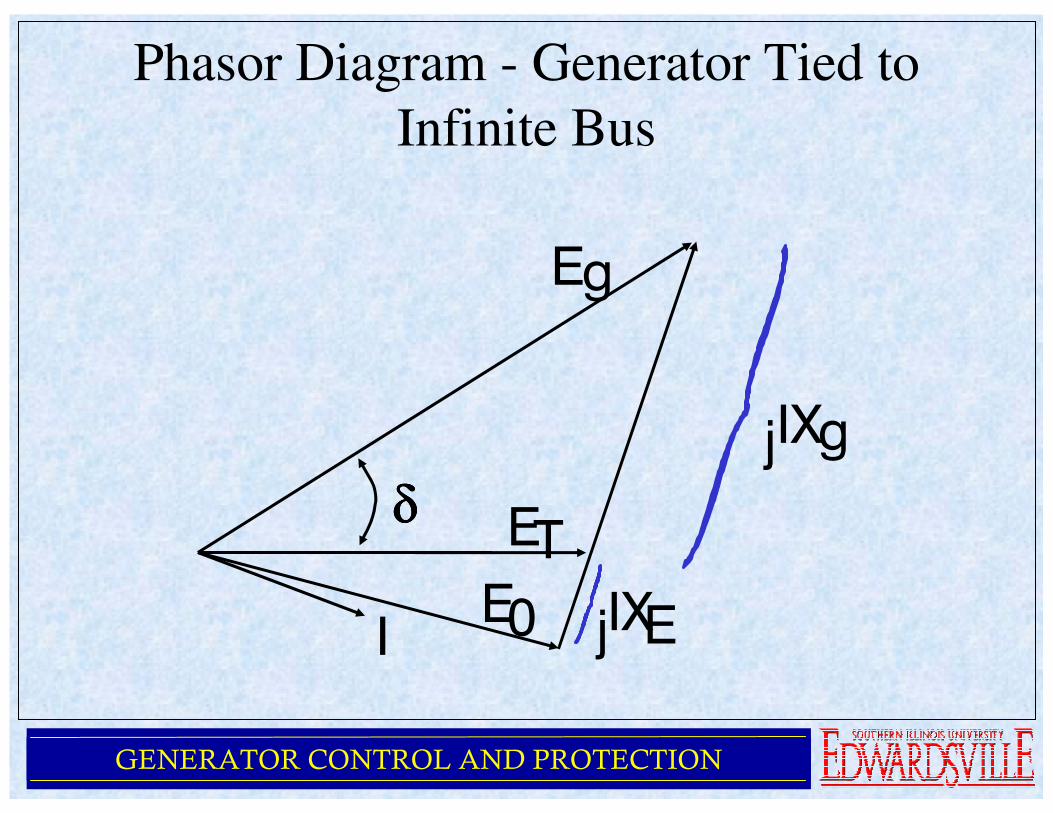
Phasor Diagram - Generator Tied to
Infinite Bus
IX
E
E
E IXI
g
g
T
0 E
δδδδ
j
j
GENERATOR CONTROL AND PROTECTION
Transient Stability
GENERATOR CONTROL AND PROTECTION
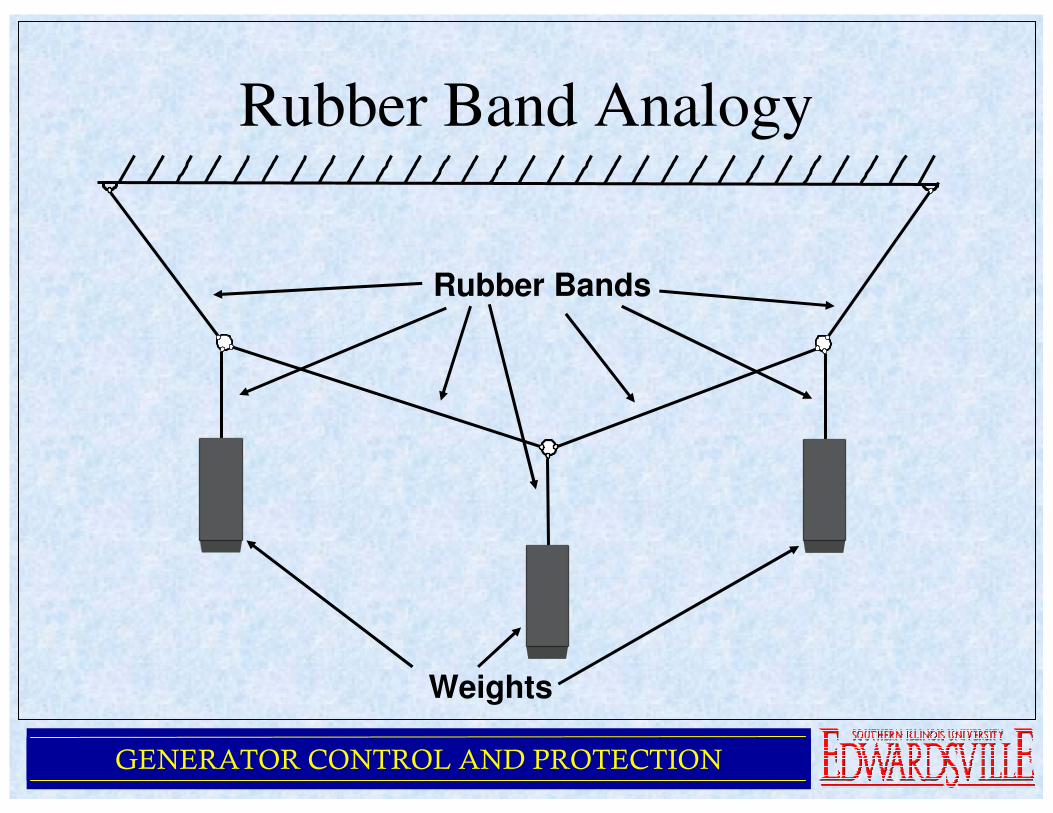
Rubber Band Analogy
Rubber Bands
Weights
GENERATOR CONTROL AND PROTECTION
Change in Electrical Torque
∆ ∆ ∆T T Te s D= +δ ω
GENERATOR CONTROL AND PROTECTION
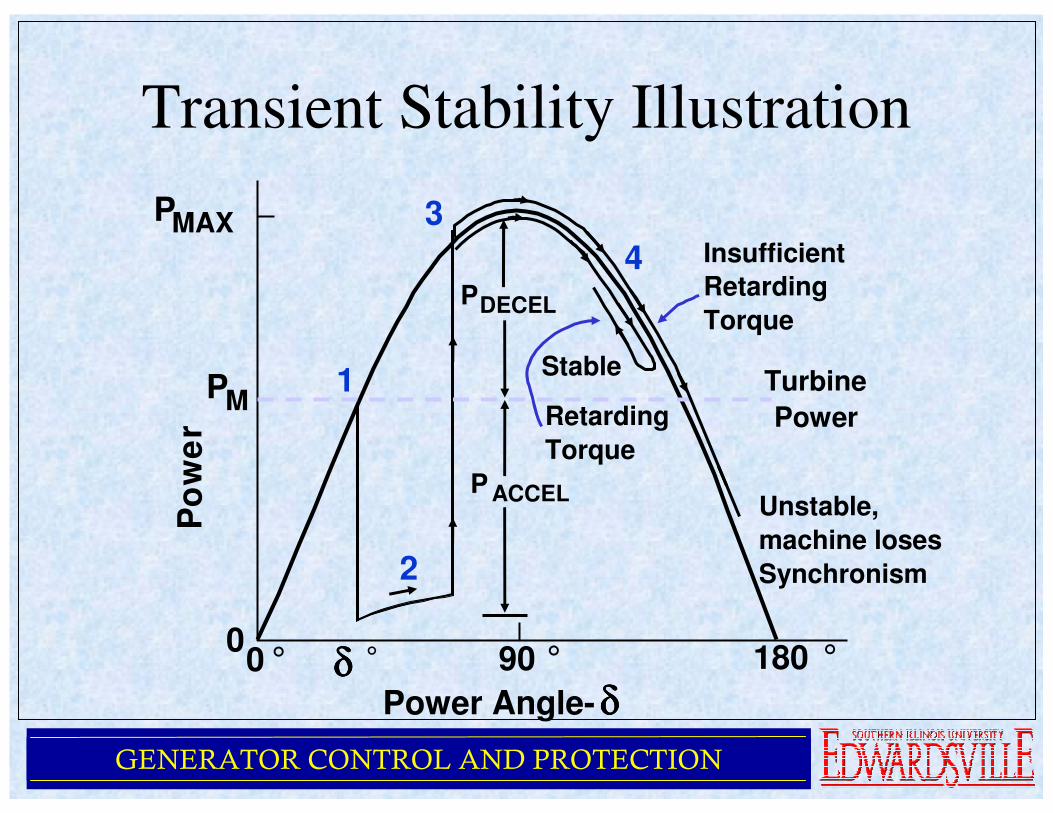
Transient Stability Illustration
PP
ow
er
Power Angle-
90 °0°0
180 °
Turbine
PowerP
P
P
2
1
3
4
Unstable,
machine loses
Synchronism
Stable
Retarding
Torque
Insufficient
Retarding
Torque
MAX
M
ACCEL
DECEL
°δδδδδδδδ
GENERATOR CONTROL AND PROTECTION
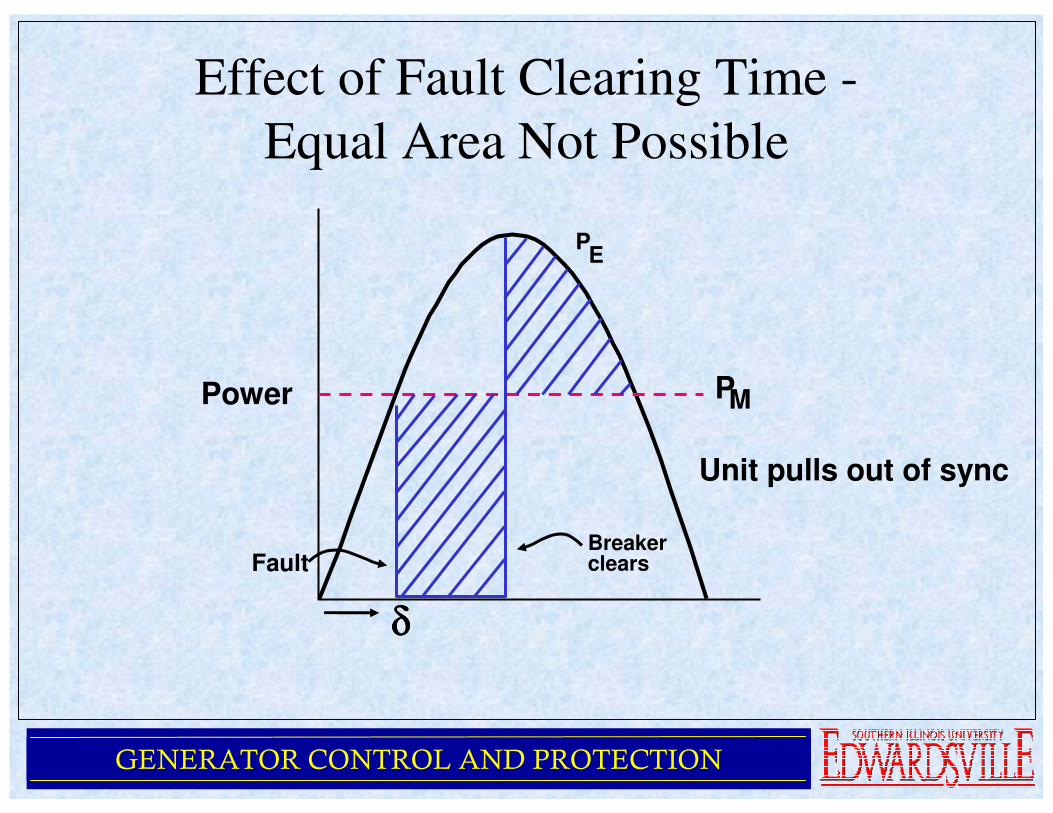
Effect of Fault Clearing Time -
Equal Area Not Possible
Fault
Power
Unit pulls out of sync
P
PE
M
Breakerclears
δδδδ
GENERATOR CONTROL AND PROTECTION
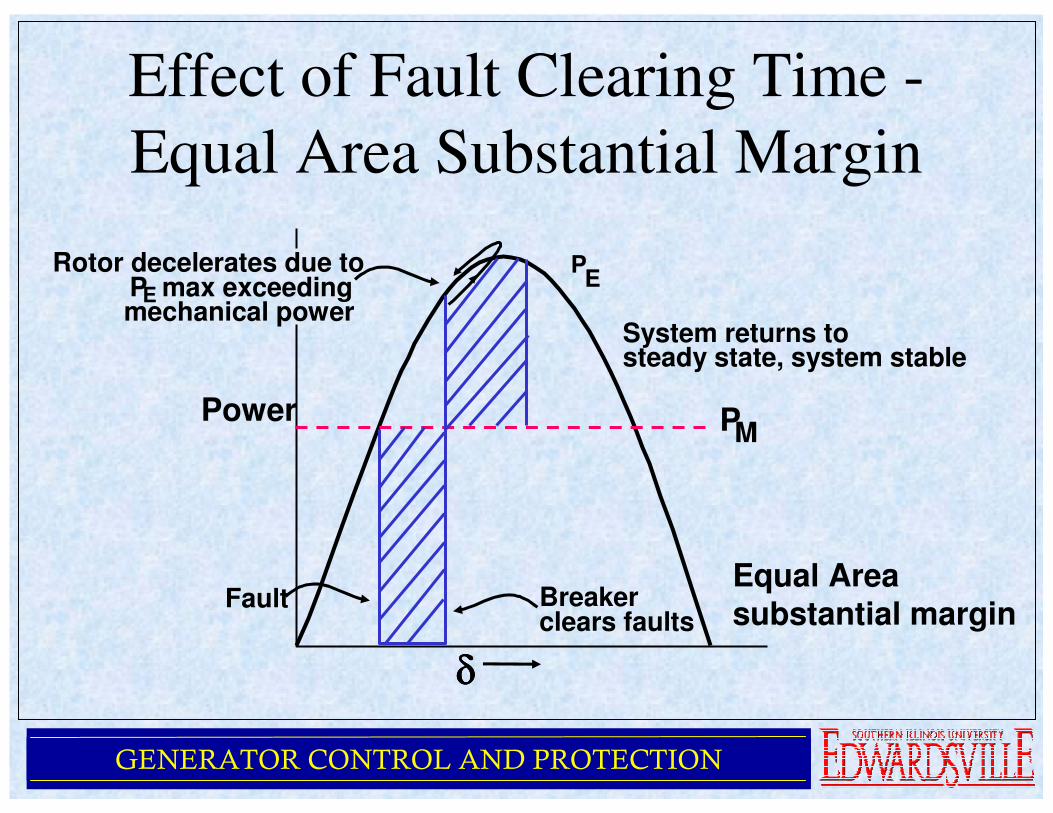
Effect of Fault Clearing Time -
Equal Area Substantial Margin
Power
Fault Breakerclears faults
System returns tosteady state, system stable
Rotor decelerates due toP max exceeding mechanical power
E
Equal Areasubstantial margin
P
PE
M
δδδδ
GENERATOR CONTROL AND PROTECTION
Effect of the Excitation System
on Stability
GENERATOR CONTROL AND PROTECTION
Steady State Electrical Power
Output
PE E
Xδe
g T
g
= sin
GENERATOR CONTROL AND PROTECTION
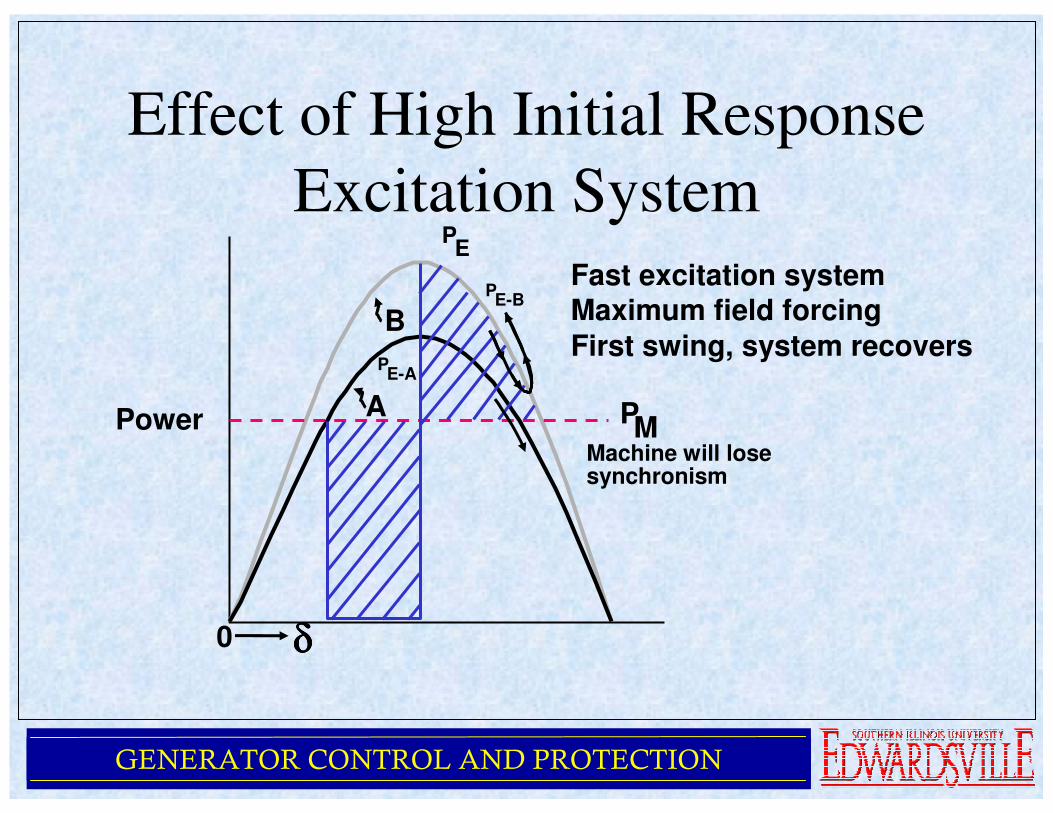
Effect of High Initial Response
Excitation System
Power
0
Fast excitation systemMaximum field forcing
First swing, system recovers
P
B
A
P
P
P
E
E-A
E-B
MMachine will losesynchronism
δδδδ

GENERATOR CONTROL AND PROTECTION
Small Signal Stability
GENERATOR CONTROL AND PROTECTION
Change in Electrical Torque
∆ ∆ ∆T T Te s D= +δ ω
GENERATOR CONTROL AND PROTECTION
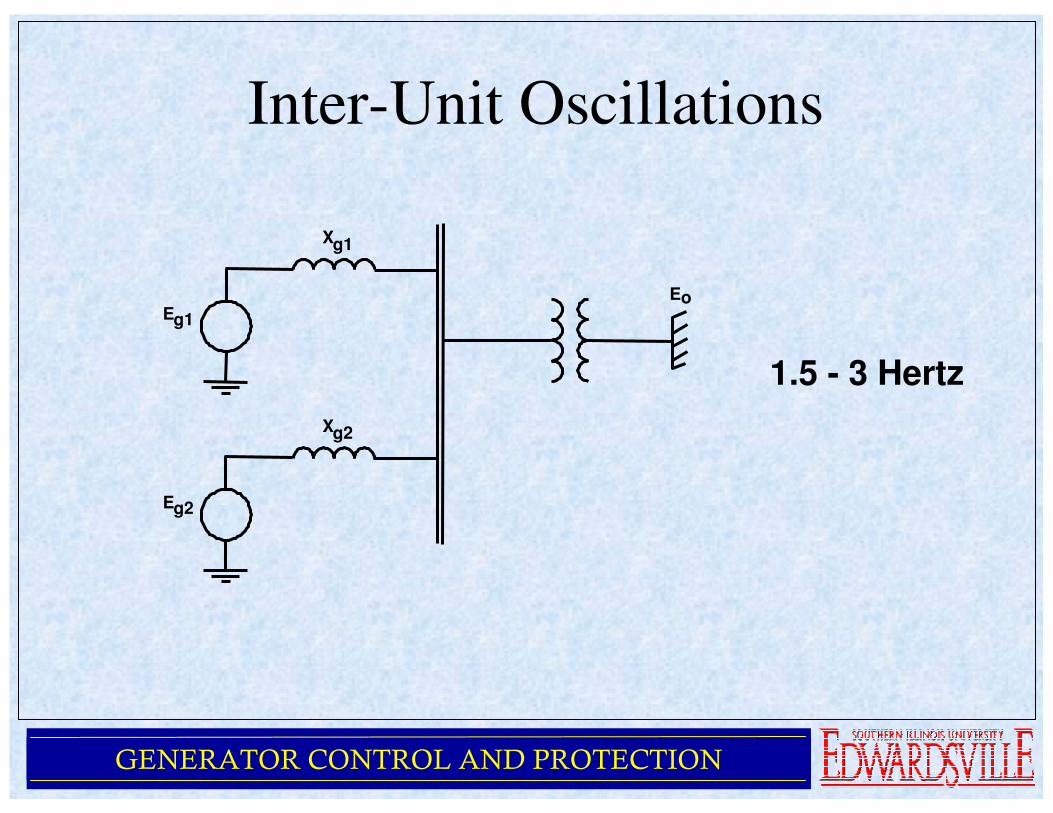
Inter-Unit Oscillations
Eg2
g1
g2
X
X
Eo
1.5 - 3 Hertz
Eg1
GENERATOR CONTROL AND PROTECTION
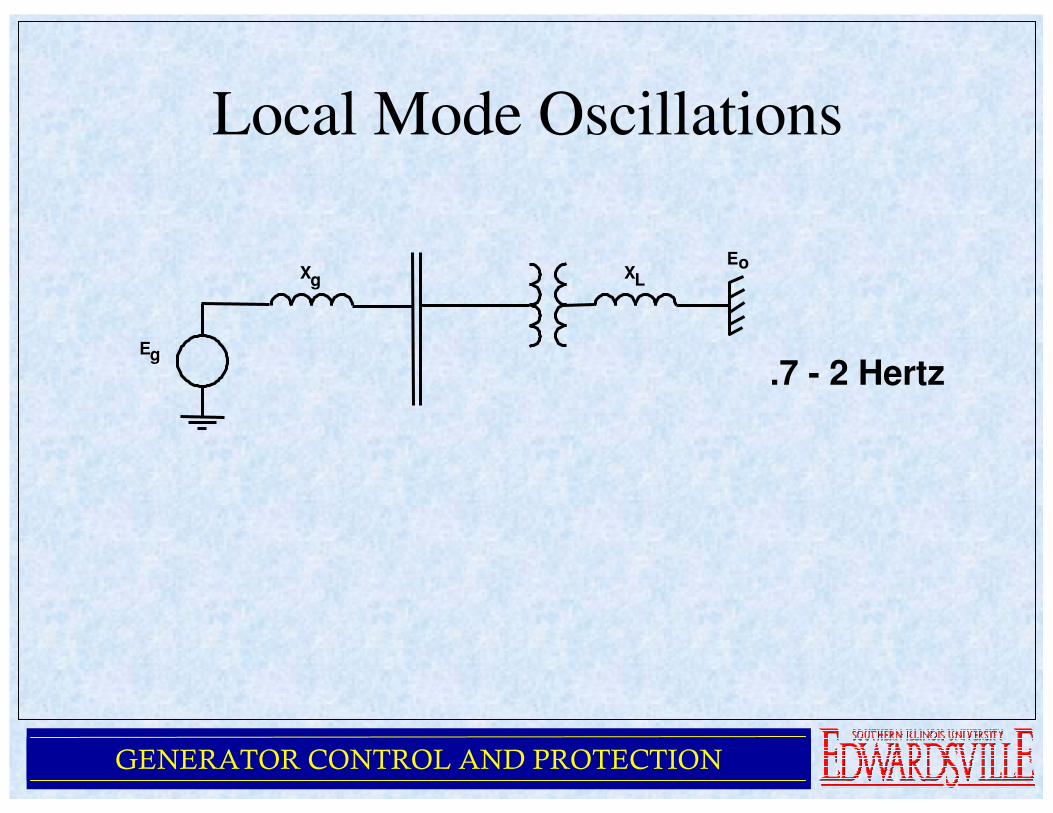
Local Mode Oscillations
Eg
g LX XEo
.7 - 2 HertzEg
GENERATOR CONTROL AND PROTECTION
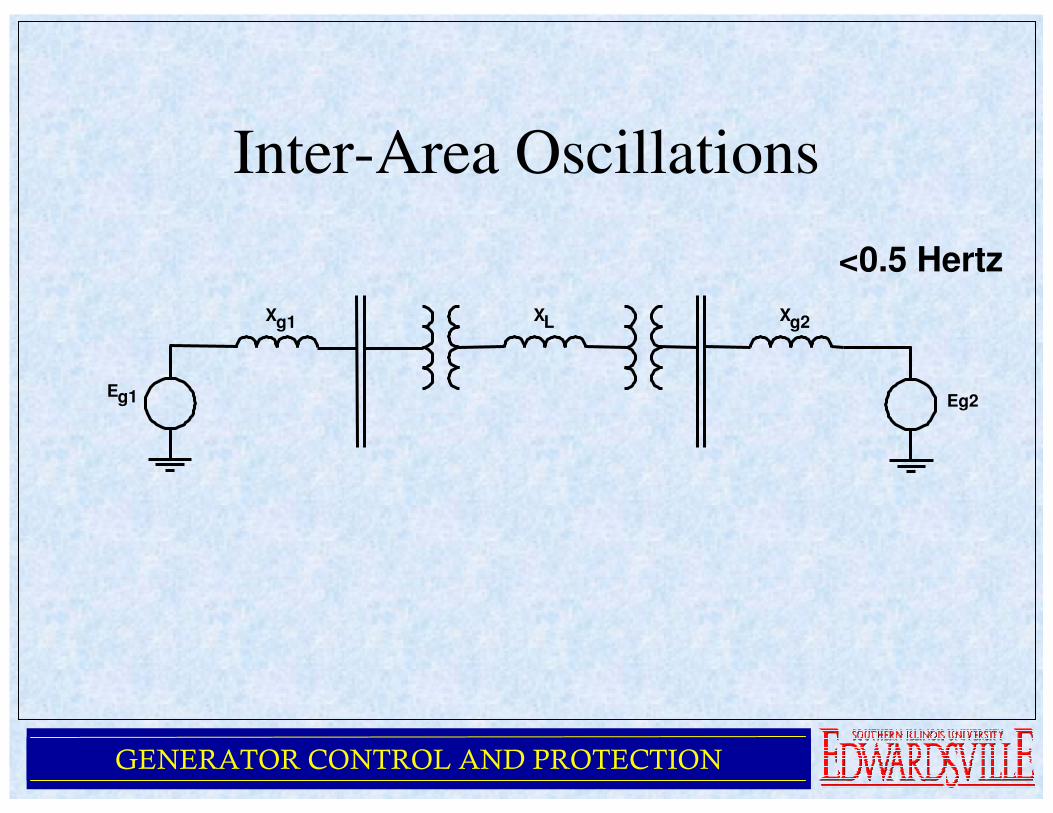
Inter-Area Oscillations
<0.5 Hertz
Eg2
g1 g2LX XX
Eg1
GENERATOR CONTROL AND PROTECTION
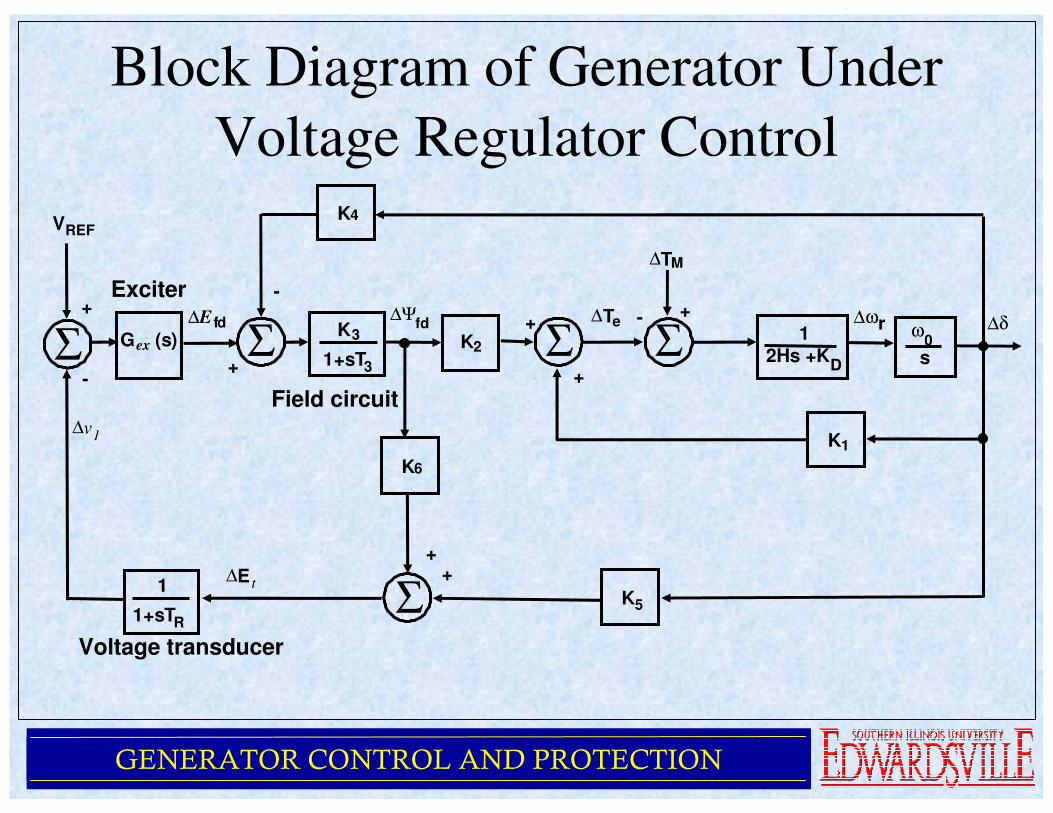
Block Diagram of Generator Under
Voltage Regulator Control
VREF
+
-
Gex (s)
Exciter∆E fd
-
+
K3
1+sT3
1
1+sTR
K4
K2
K6
++∆E
∆v
t
1
+
12Hs +K
D
ω0
s
∆Te
∆T
∆ω ∆δ
M
+- r
K5
K1
+∆Ψfd
Σ Σ Σ
Σ
Σ
Voltage transducer
Field circuit

GENERATOR CONTROL AND PROTECTION
Power System Stabilizers
GENERATOR CONTROL AND PROTECTION
The "Swing Equation"
2
0
2
2
H d
dtT T Km e D rω
δω= − − ∆
GENERATOR CONTROL AND PROTECTION
Small Signal Version of "Swing
Equation"
∆ ∆ ∆T T Te s D= +δ ω
GENERATOR CONTROL AND PROTECTION
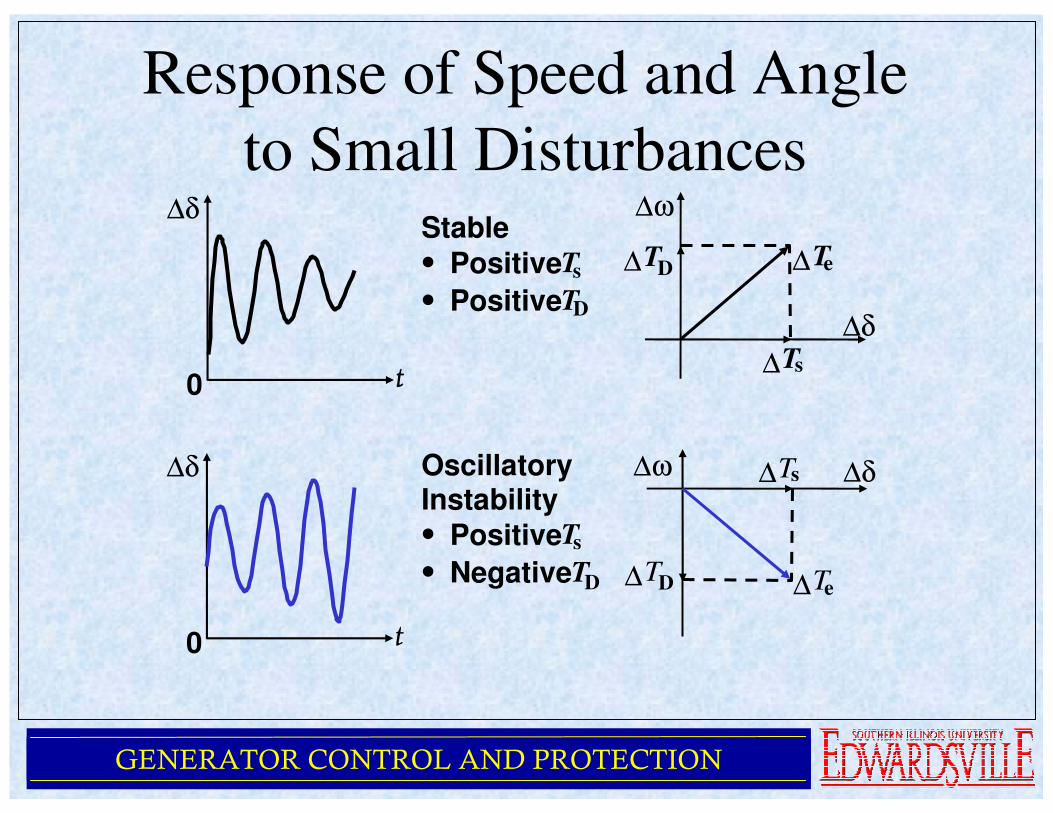
Response of Speed and Angle
to Small Disturbances
0
0
∆δ
∆δ
∆δ
∆ω
∆ω
∆T
∆T
∆T
∆T
∆T
∆T
D
D
e
e
s
s∆δ
D
s
Stable
Positive • T
• Positive T
D
s
OscillatoryInstability
Positive • T
T• Negative
GENERATOR CONTROL AND PROTECTION
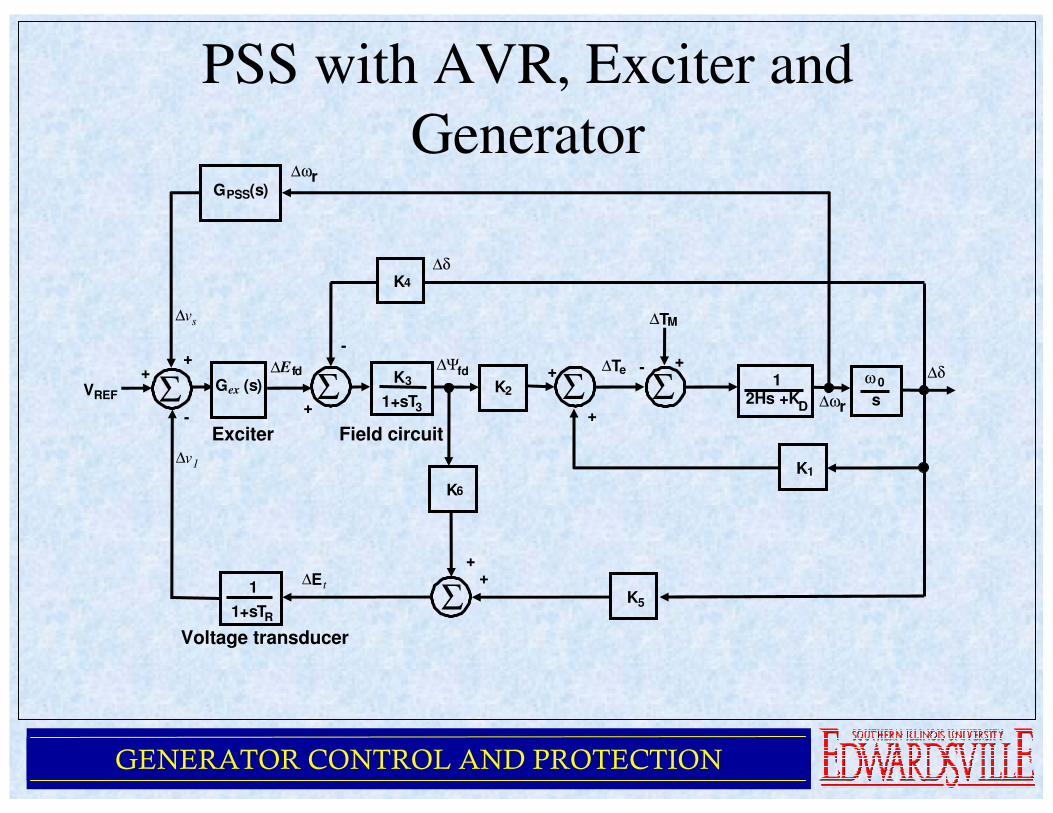
PSS with AVR, Exciter and
Generator
VREF
++
-
Gex (s)
Exciter
∆Efd
-
+
K3
1+sT3
1
1+sTR
K4
K2
K6
++∆E
∆v
∆v
t
1
s
+
12Hs +K
D
ω 0
s
∆Te
∆T
∆ω
∆ω
∆δ
∆δ
M
+-
r
r
K5
K1
+∆Ψfd
GP S(s)
Σ Σ Σ
Σ
Σ
Voltage transducer
Field circuit

GENERATOR CONTROL AND PROTECTION

GENERATOR CONTROL AND PROTECTION
PSS Theory of Operation
Speed Based Stabilizers
GENERATOR CONTROL AND PROTECTION
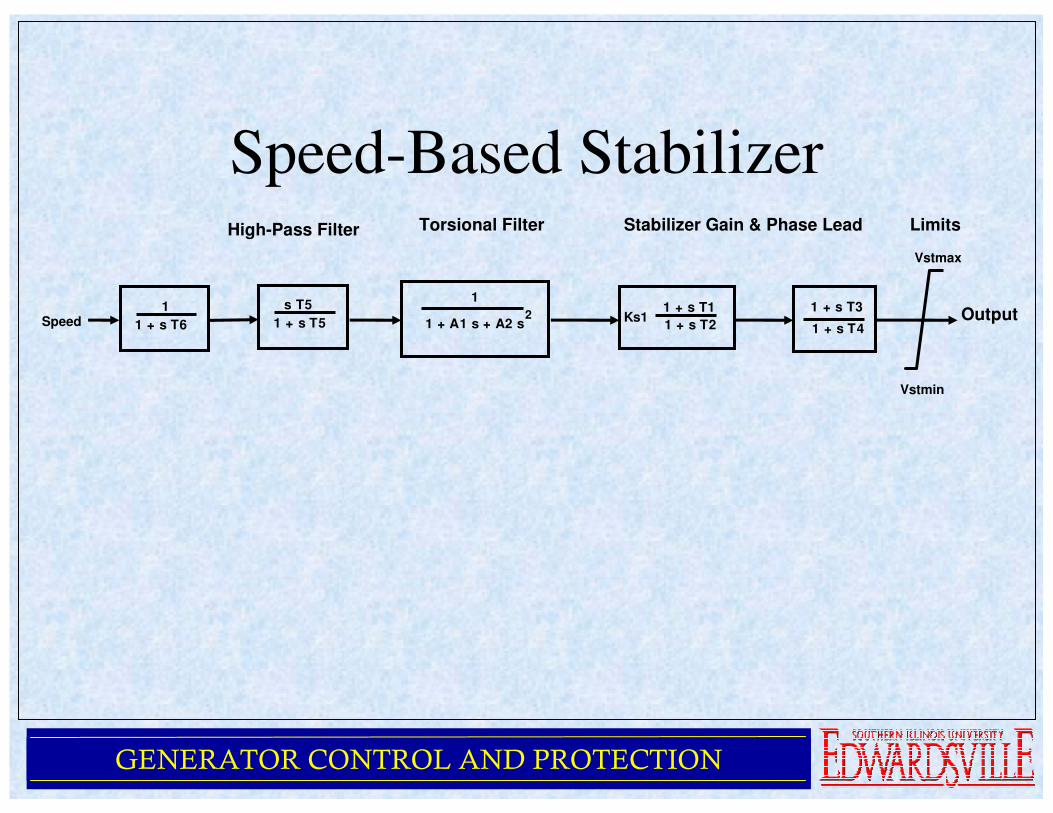
Speed-Based Stabilizer
Speed
s T5
1 + s T5
1
1 + s T6
1
1 + A1 s + A2 sKs1
1 + s T1
1 + s T2
1 + s T3
1 + s T4
Vstmax
Vstmin
Output
High-Pass Filter Stabilizer Gain & Phase Lead Limits
2
Torsional Filter
GENERATOR CONTROL AND PROTECTION
PSS Theory of Operation
Dual Input Stabilizers
GENERATOR CONTROL AND PROTECTION
Small Signal Version of "Swing
Equation"
∆ ∆ ∆T T Te s D= +δ ω
GENERATOR CONTROL AND PROTECTION
Speed Deviation from Net
Accelerating Power
d
dt HT T Kr m e D r
∆ ∆ω ω= − −1
2( )
GENERATOR CONTROL AND PROTECTION
Accelerating Power Based on
Integral of Mechanical and
Electrical Power
T ]∆ ∆ ∆ω = − ∫[∫1
2HTm e
GENERATOR CONTROL AND PROTECTION
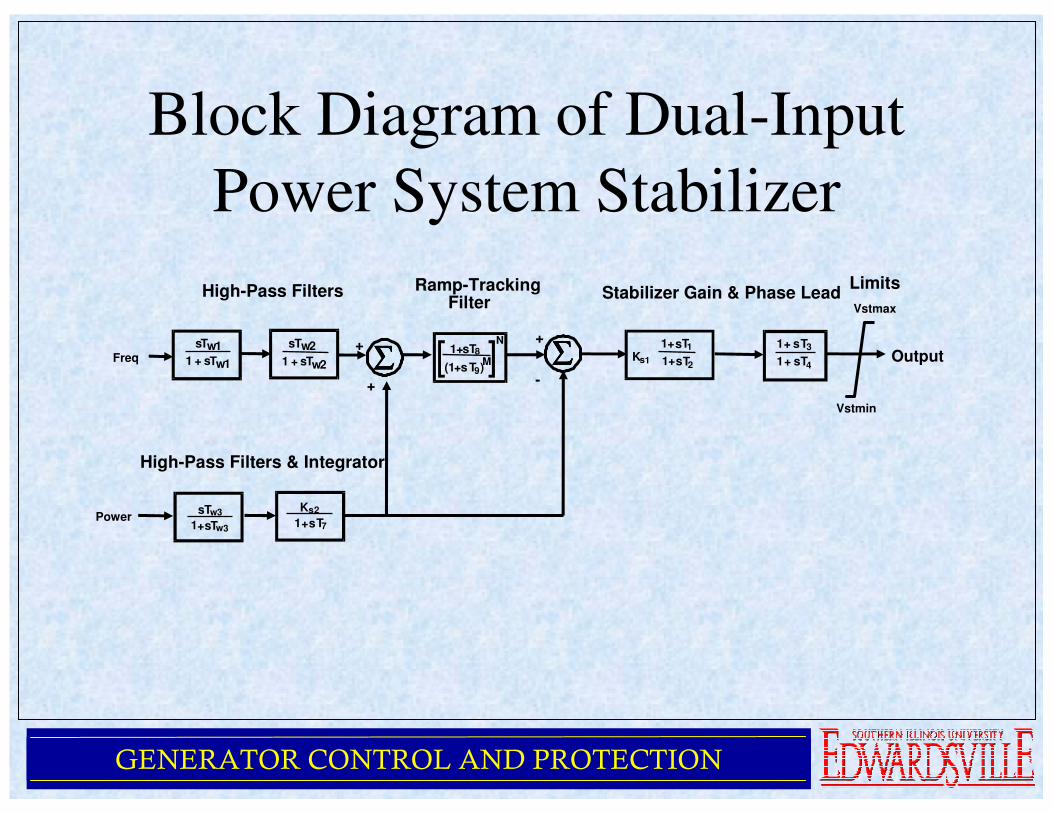
Block Diagram of Dual-Input
Power System Stabilizer
Freq
Power
+
+
+
-
Ramp-TrackingFilter Vstmax
Vstmin
Output
High-Pass Filters
High-Pass Filters & Integrator
Stabilizer Gain & Phase LeadLimits
ΣΣΣΣ ΣΣΣΣ1+sT8
(1+sT9)
N
M
sTw2
1 + sTw2
sTw1
1 + sTw1Ks1
1+sT1
1+sT2
1+ sT3
1+ sT4
sTw3
1+sTw3
Ks2
1+sT7
GENERATOR CONTROL AND PROTECTION
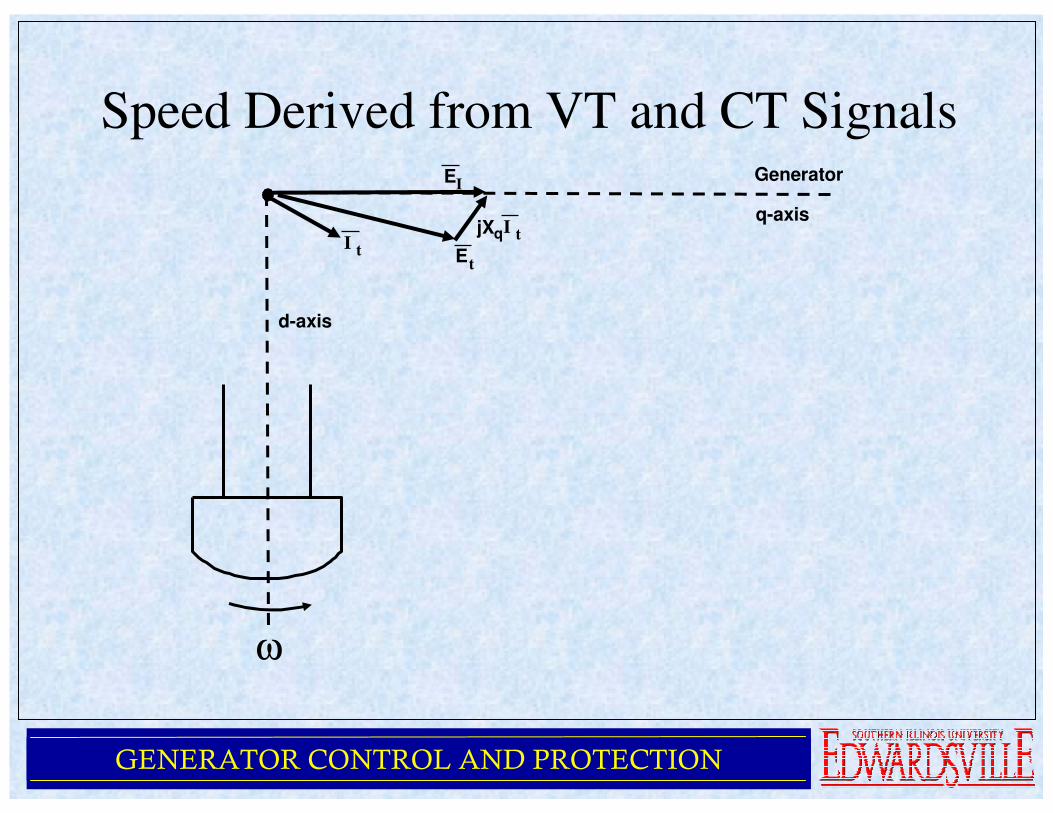
Speed Derived from VT and CT Signals
ω
E
E
Generator
q-axis
d-axis
jX
I
It
t
Itq
GENERATOR CONTROL AND PROTECTION
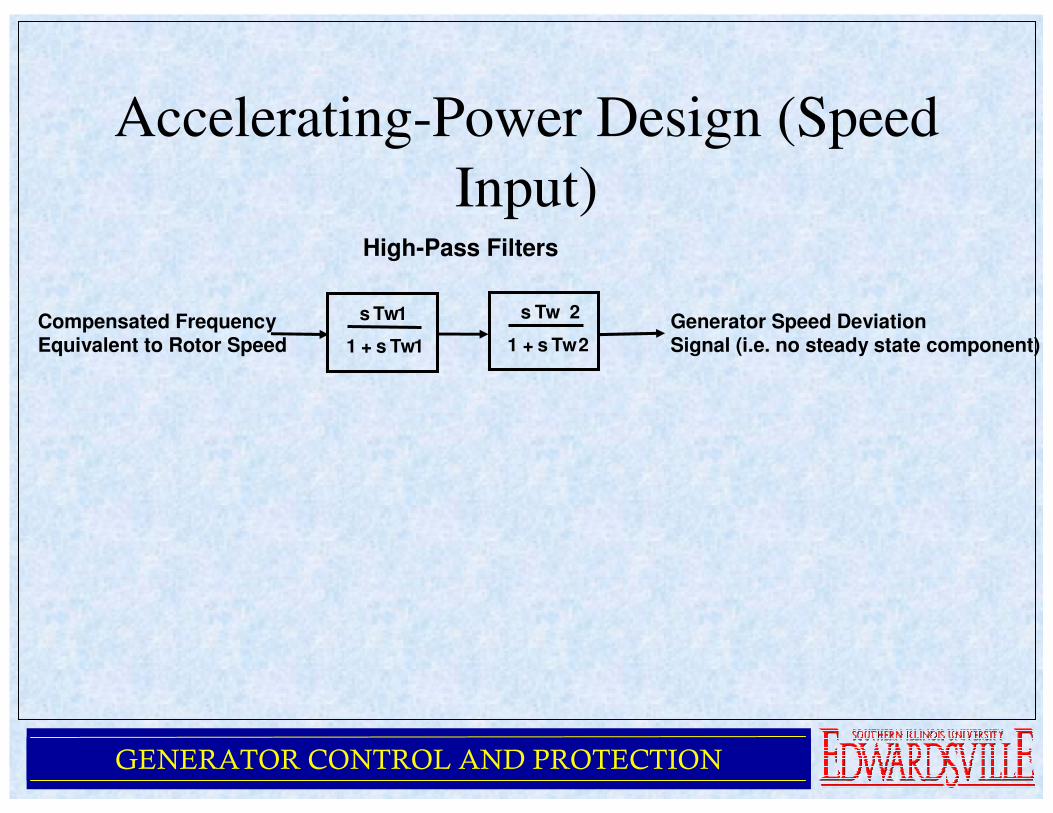
Accelerating-Power Design (Speed
Input)
Compensated FrequencyEquivalent to Rotor Speed
s Tw1
1 + s Tw1
s Tw 2
1 + s Tw2
High-Pass Filters
Generator Speed DeviationSignal (i.e. no steady state component)
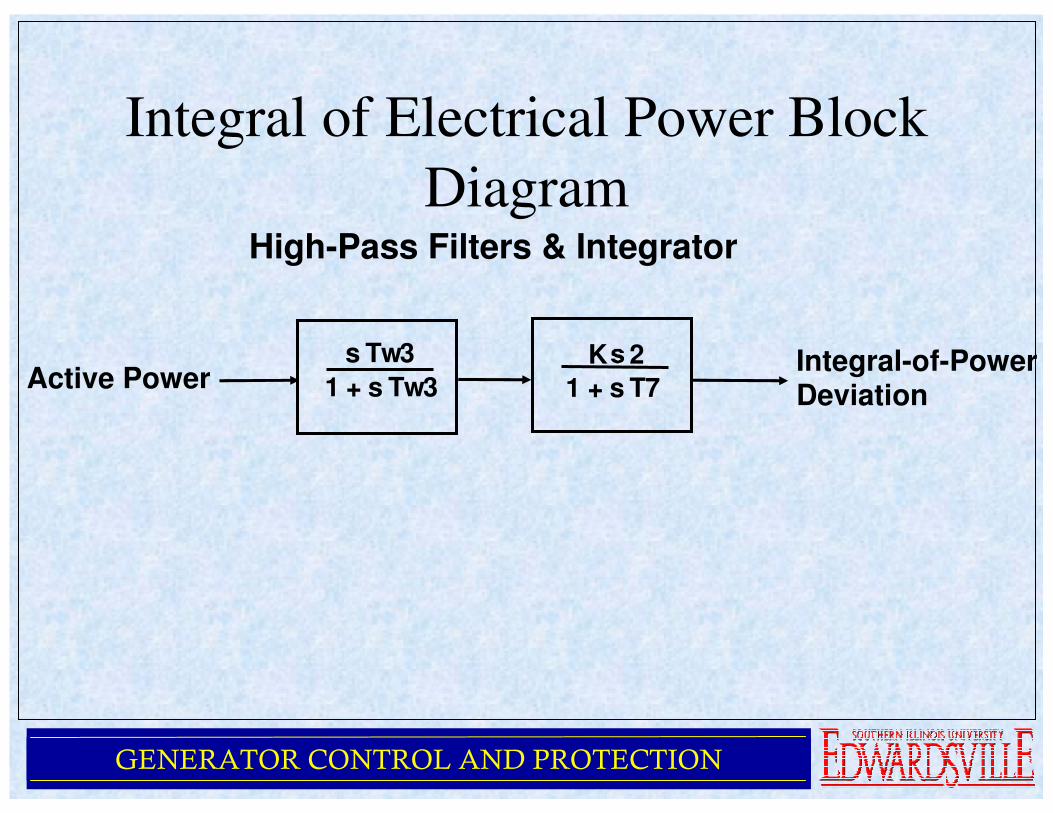
GENERATOR CONTROL AND PROTECTION
Integral of Electrical Power Block
Diagram
Active Powers Tw3
1 + s Tw3
K 2
1 + s T7
High-Pass Filters & Integrator
Integral-of-PowerDeviation
GENERATOR CONTROL AND PROTECTION
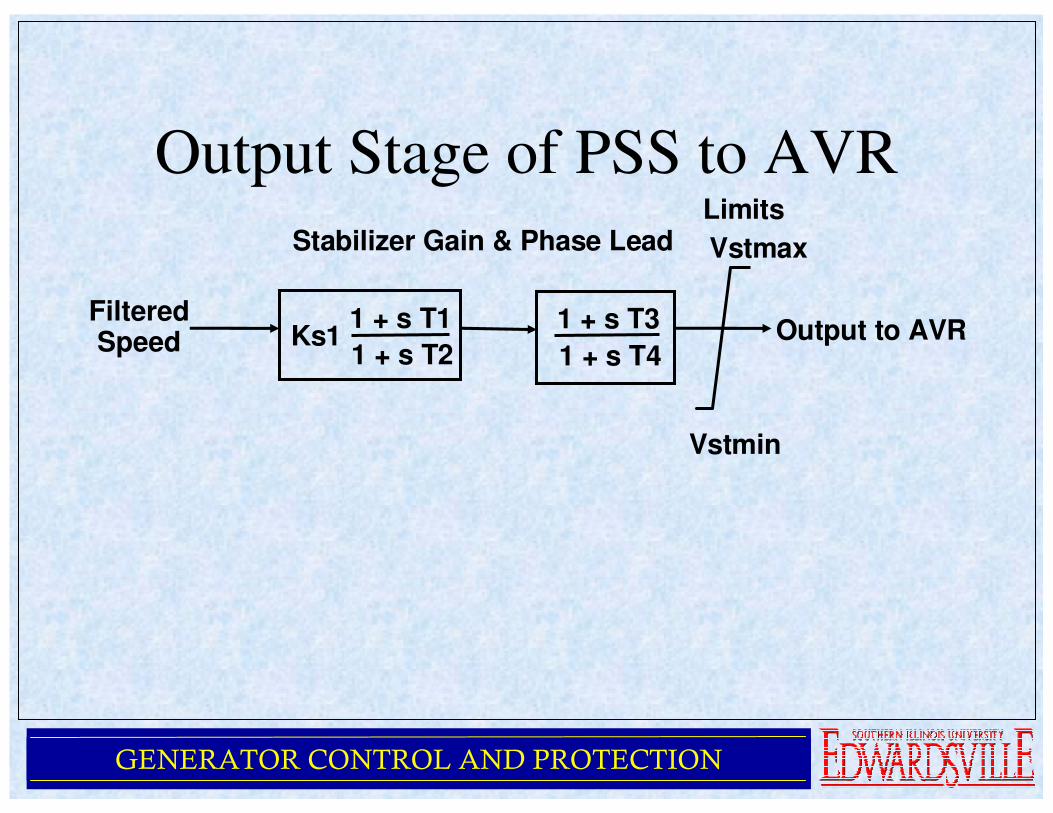
Output Stage of PSS to AVR
Ks11 + s T1
1 + s T2
1 + s T3
1 + s T4
Vstmax
Vstmin
Output to AVR
S
Filtered Speed
tabilizer Gain & Phase LeadLimits

GENERATOR CONTROL AND PROTECTION
Case Studies

GENERATOR CONTROL AND PROTECTION
Case 1 - Hydro Generator without PSS
• Time (seconds)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
GENERATOR CONTROL AND PROTECTION
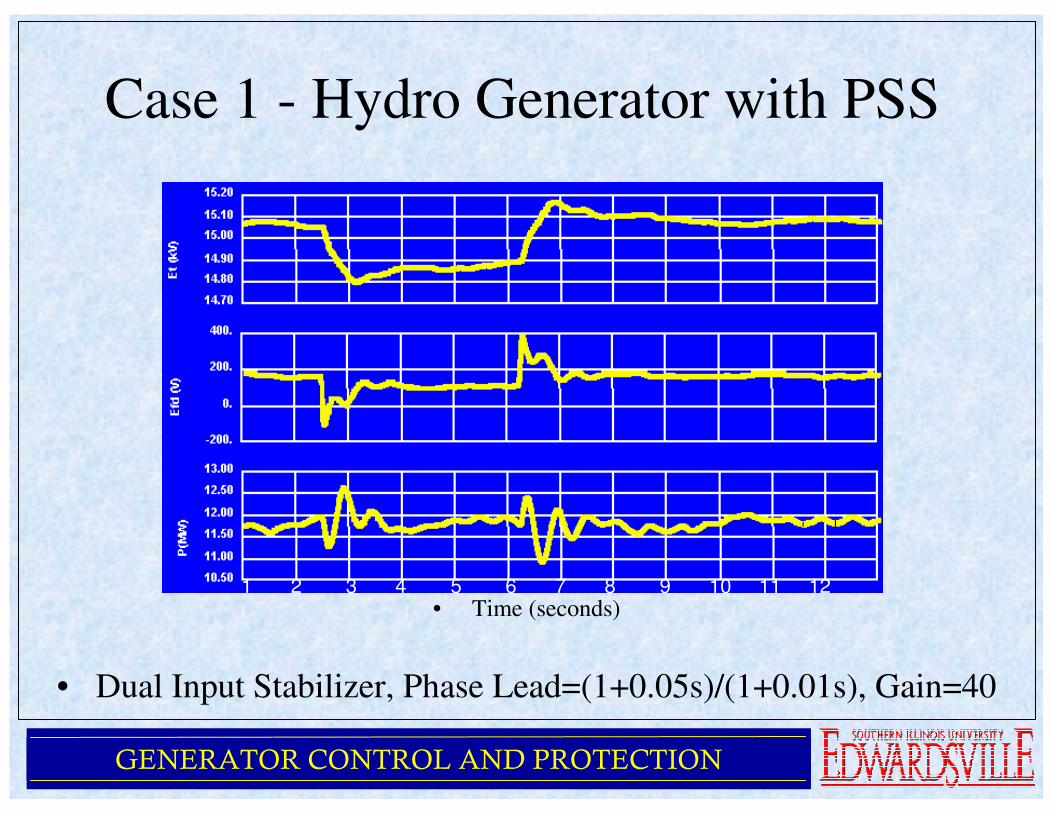
Case 1 - Hydro Generator with PSS
• Dual Input Stabilizer, Phase Lead=(1+0.05s)/(1+0.01s), Gain=40
• Time (seconds)1 2 3 4 5 6 7 8 9 10 11 12
GENERATOR CONTROL AND PROTECTION
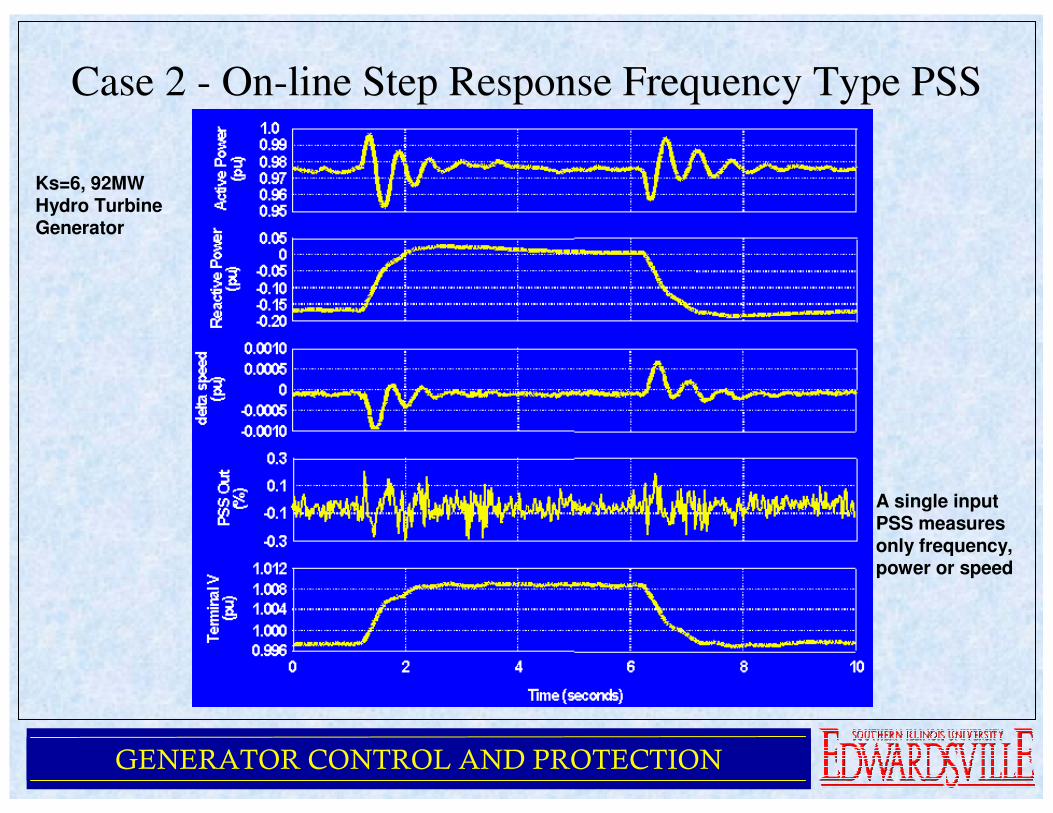
Ks=6, 92MW Hydro Turbine Generator
A single input PSS measures only frequency, power or speed
Case 2 - On-line Step Response Frequency Type PSS
GENERATOR CONTROL AND PROTECTION
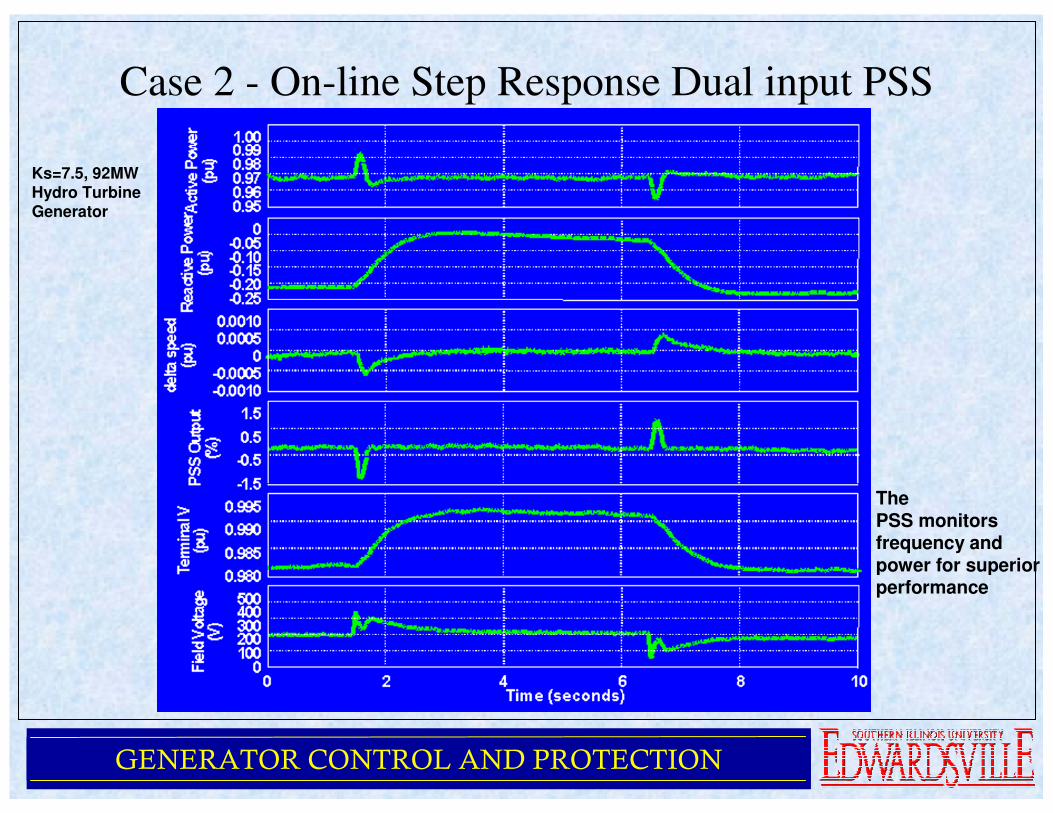
Ks=7.5, 92MW Hydro Turbine Generator
The PSS monitors frequency and power for superior performance
Case 2 - On-line Step Response Dual input PSS
GENERATOR CONTROL AND PROTECTION
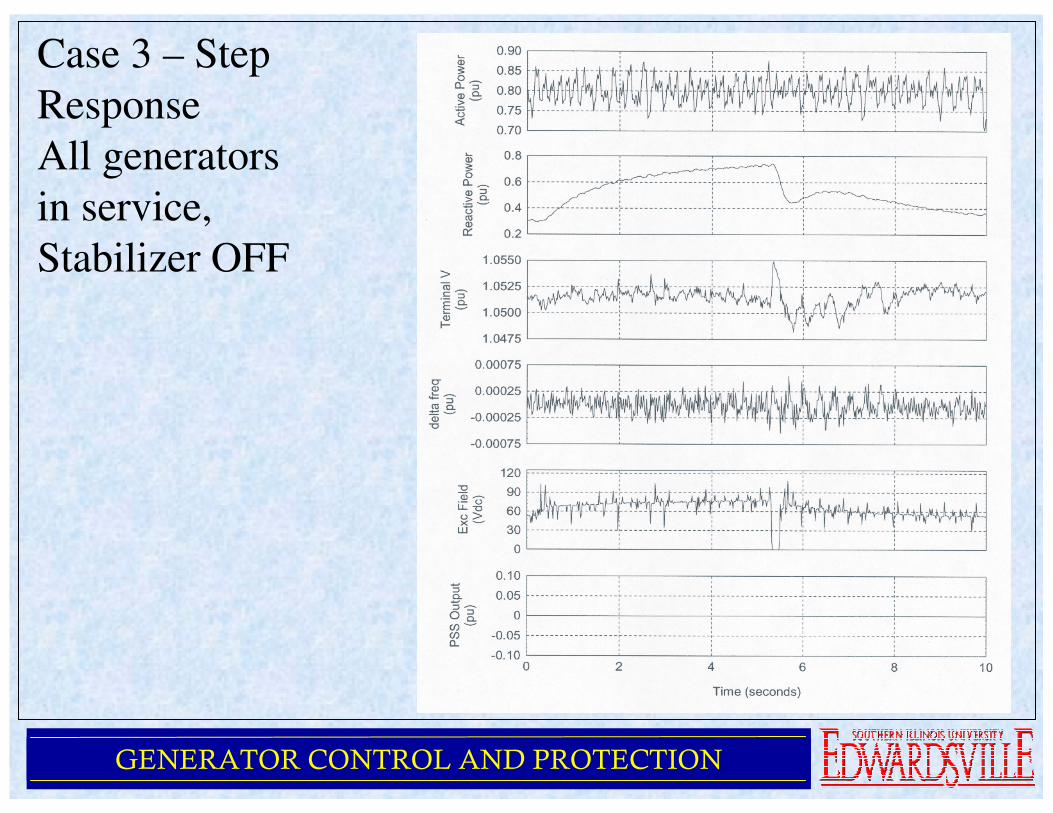
Case 3 – Step
Response
All generators
in service,
Stabilizer OFF
GENERATOR CONTROL AND PROTECTION
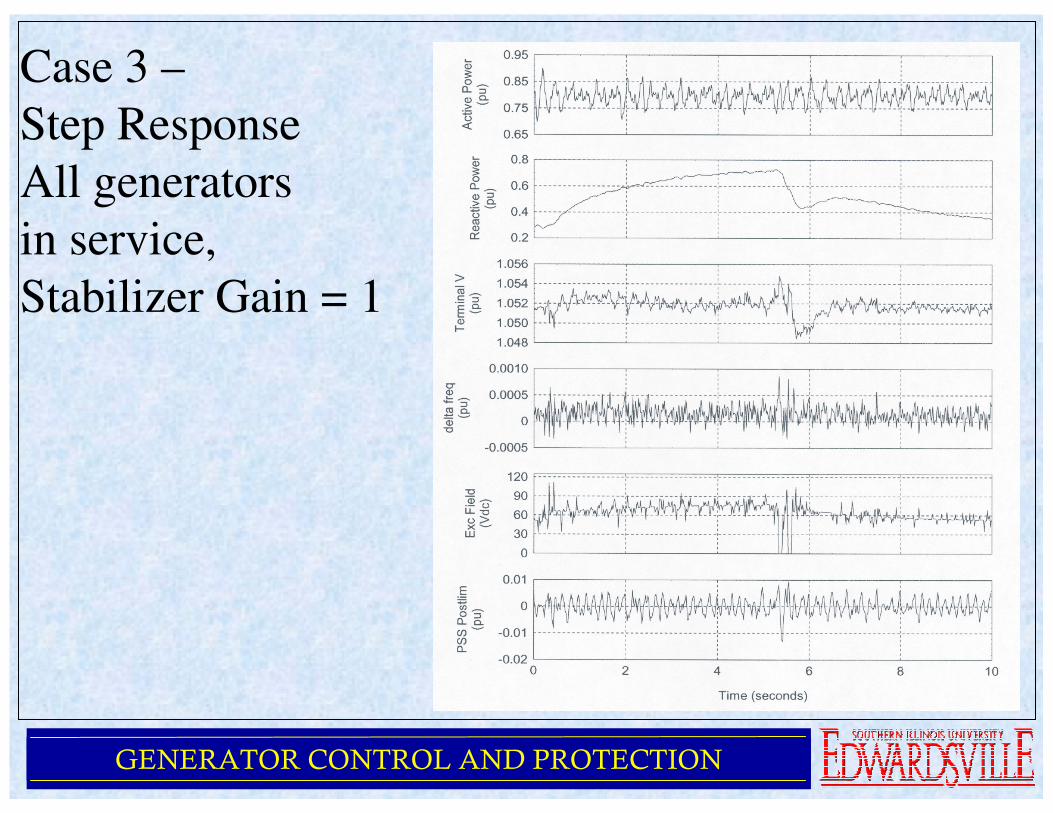
Case 3 –
Step Response
All generators
in service,
Stabilizer Gain = 1
GENERATOR CONTROL AND PROTECTION
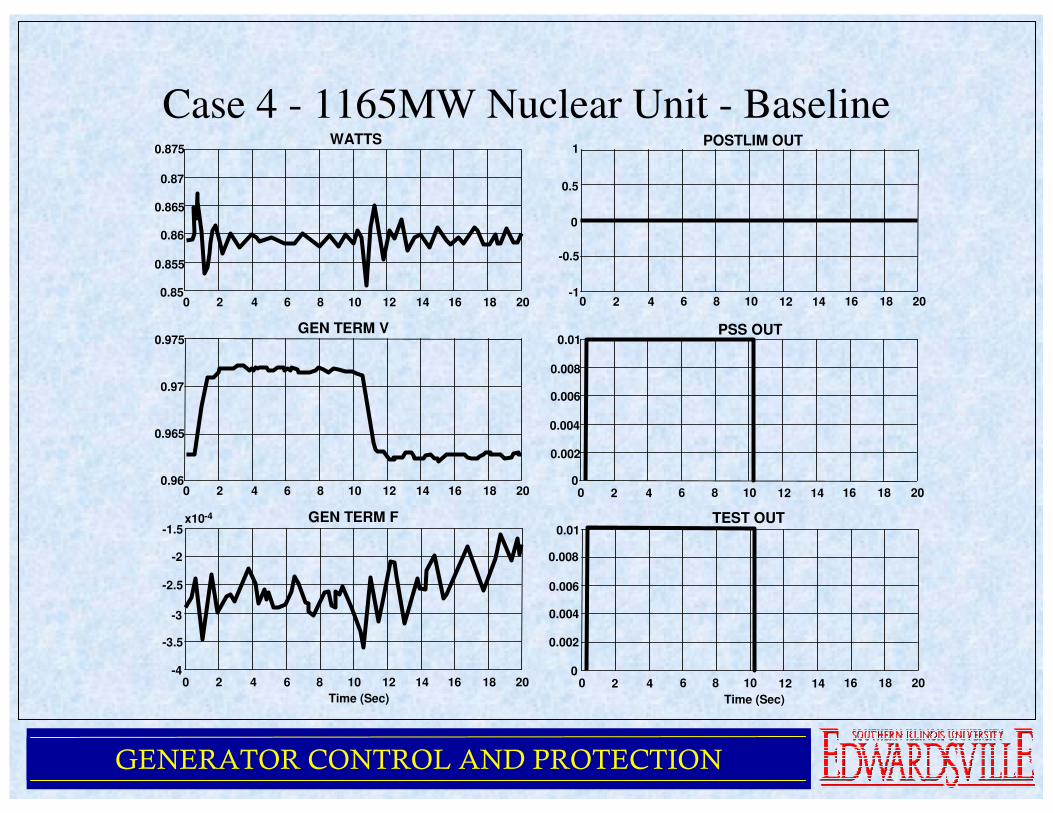
0.875
0.01
0.01
-1.5
1
0.975
WATTS
TEST OUT
PSS OUT
GEN TERM F
POSTLIM OUT
GEN TERM V
0.865
0.006
0.006
-2.5
0
0.965
0.855
0.002
0.002
-3.5
-1
0.87
0.008
0.008
-2
0.5
0.97
0.86
0.004
0.004
-3
-0.5
0.96
0.85
0
0
-4
0
0
0
0
0
0
x10-4
8
8
8
8
8
8
4
4
4
4
4
4
12
12
12
12
12
12
18
18
18
18
18
18
2
2
2
2
2
2
10
10
10
10
10
10
16
16
16
16
16
16
6
6
6
6
6
6
14
14
14
14
14
14
20
20
20
20
Time (Sec) Time (Sec)
20
20
Case 4 - 1165MW Nuclear Unit - Baseline
GENERATOR CONTROL AND PROTECTION
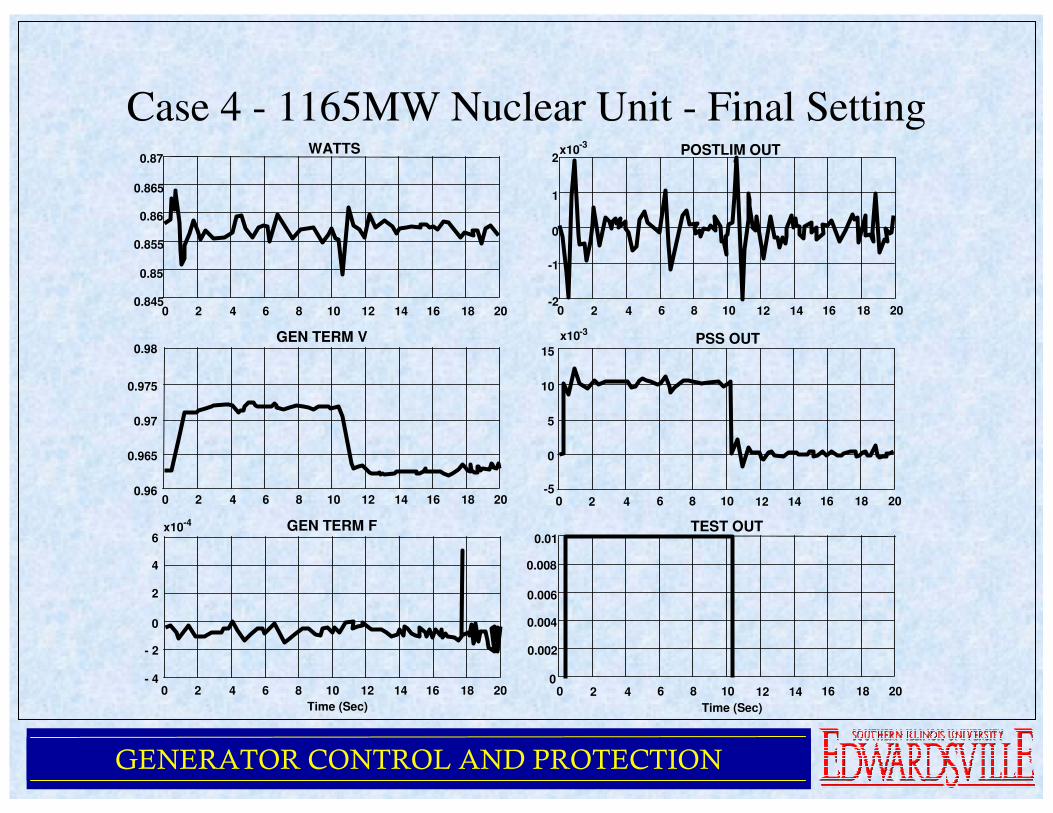
Case 4 - 1165MW Nuclear Unit - Final Setting0.87
0.016
2
0.98
WATTS
TEST OUT
PSS OUT
GEN TERM F
POSTLIM OUT
GEN TERM V
0.86
0.006
10
2
0
0.97
0.85
0.002
0
- 2
-2
0.865
0.008
15
4
1
0.975
0.855
0.004
5
0
-1
0.965
0.845
0
-5
- 4
0
0
0
0
0
0
x10-4
x10-3
x10-3
8
8
8
8
8
8
4
4
4
4
4
4
12
12
12
12
12
12
18
18
18
18
18
18
2
2
2
2
2
2
10
10
10
10
10
10
16
16
16
16
16
16
6
6
6
6
6
6
14
14
14
14
14
14
20
20
20
20
Time (Sec) Time (Sec)
20
200.96
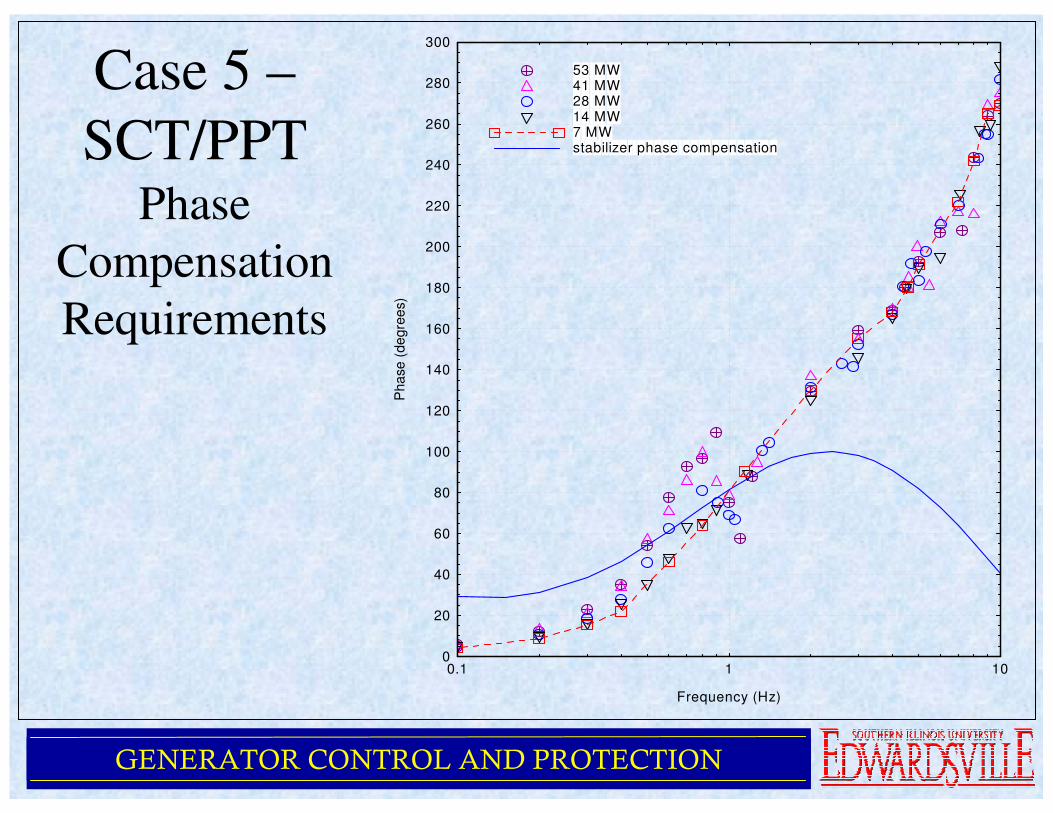
GENERATOR CONTROL AND PROTECTION
Case 5 –
SCT/PPT Phase
Compensation
Requirements
0
20
40
60
80
100
120
140
160
180
200
220
240
260
280
300
0.1 1 10
53 MW41 MW28 MW14 MW7 MWstabilizer phase compensation
Frequency (Hz)
Pha
se
(de
gre
es)
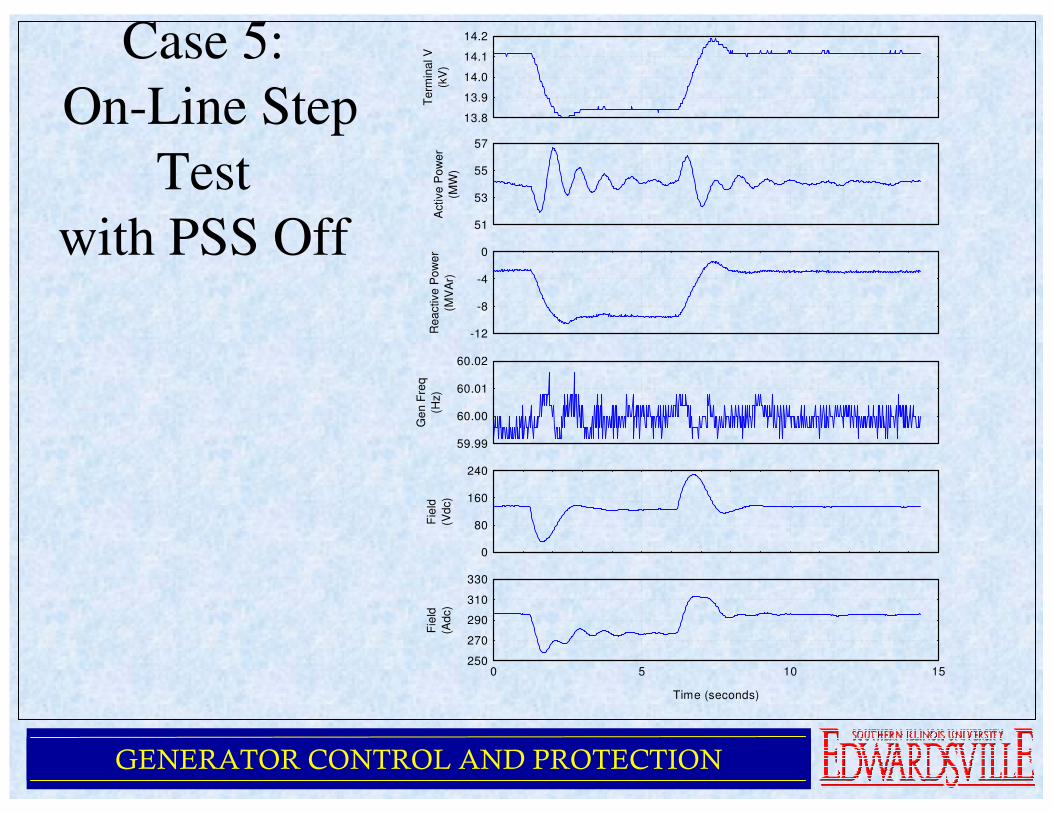
GENERATOR CONTROL AND PROTECTION
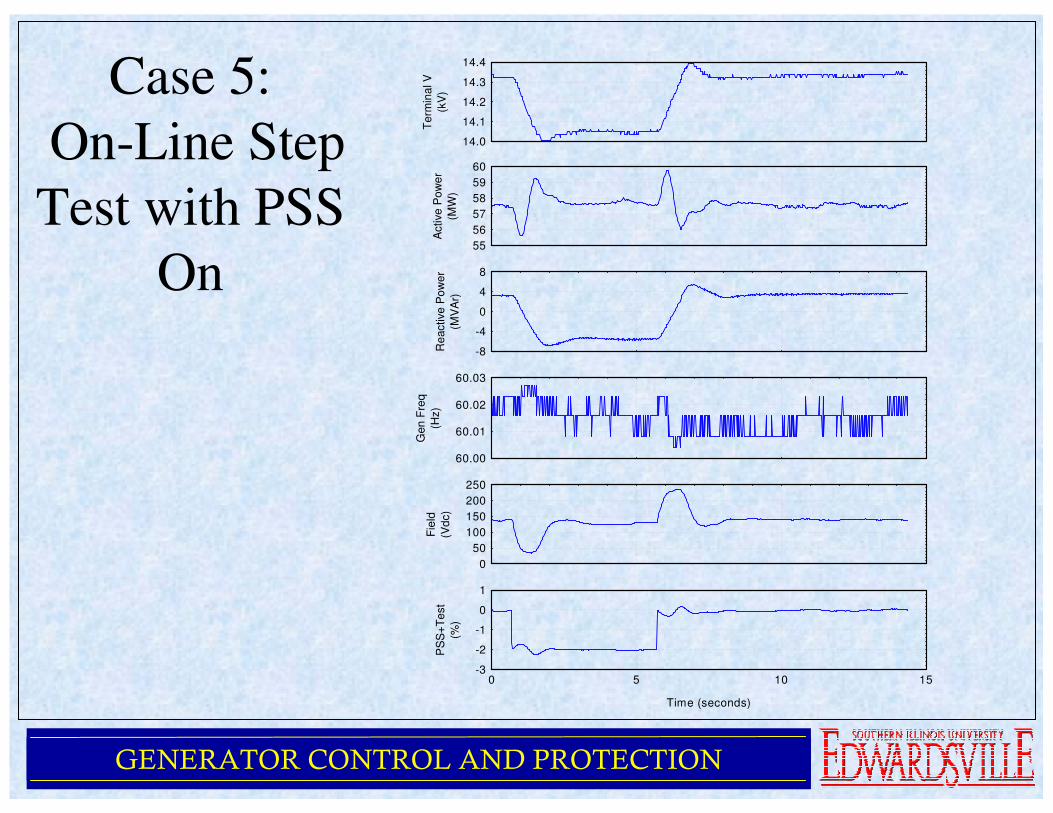
Case 5:
On-Line Step
Test
with PSS Off
59.99
60.00
60.01
60.02
Ge
n F
req
(Hz)
0
80
160
240
Fie
ld
(Vd
c)
250
270
290
310
330
0 5 10 15
Time (seconds)
Fie
ld
(Ad
c)
51
53
55
57
Active
Po
we
r
(MW
)
-12
-8
-4
0
Re
active
Po
we
r
(MV
Ar)
13.8
13.9
14.0
14.1
14.2
Te
rmin
al V
(kV
)
GENERATOR CONTROL AND PROTECTION
Case 5:
On-Line Step
Test with PSS
On
60.00
60.01
60.02
60.03
Gen
Fre
q
(Hz)
55
56
57
58
59
60
Active
Po
we
r
(MW
)
-8
-4
0
4
8
Re
active
Po
we
r
(MV
Ar)
0
50
100
150
200
250
Fie
ld
(Vd
c)
-3
-2
-1
0
1
0 5 10 15
Time (seconds)
PS
S+
Te
st
(%)
14.0
14.1
14.2
14.3
14.4
Te
rmin
al V
(kV
)
GENERATOR CONTROL AND PROTECTION
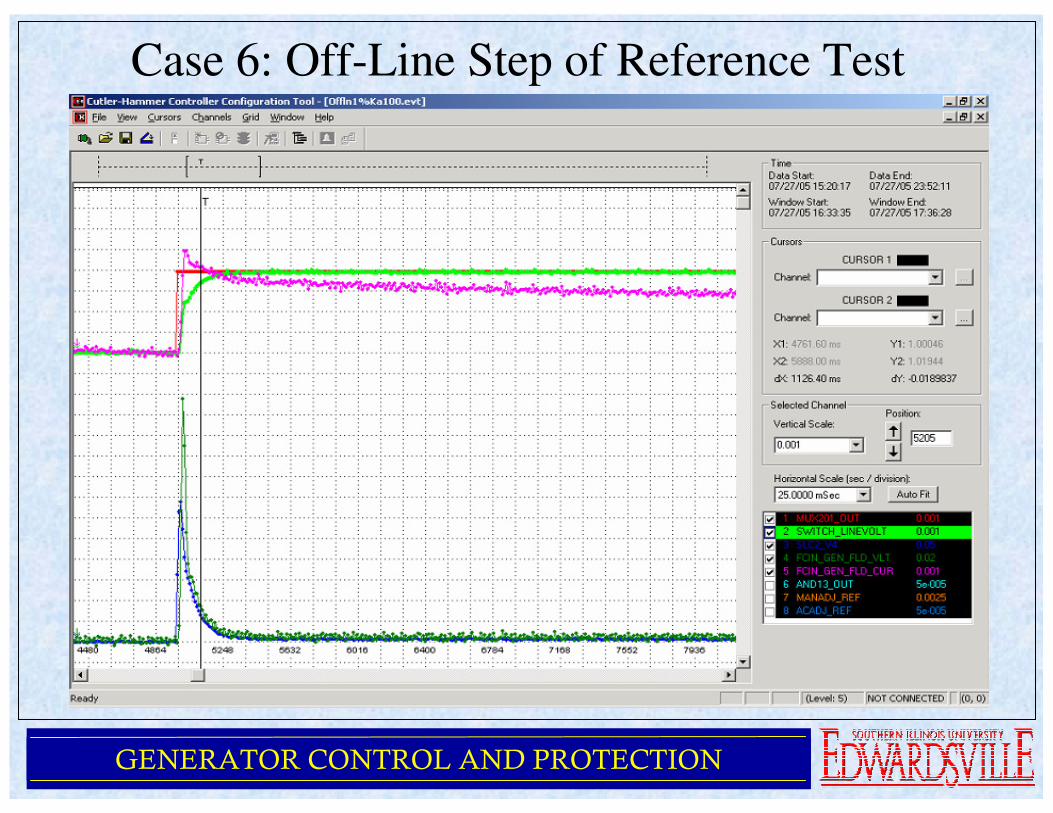
Case 6: Off-Line Step of Reference Test
GENERATOR CONTROL AND PROTECTION
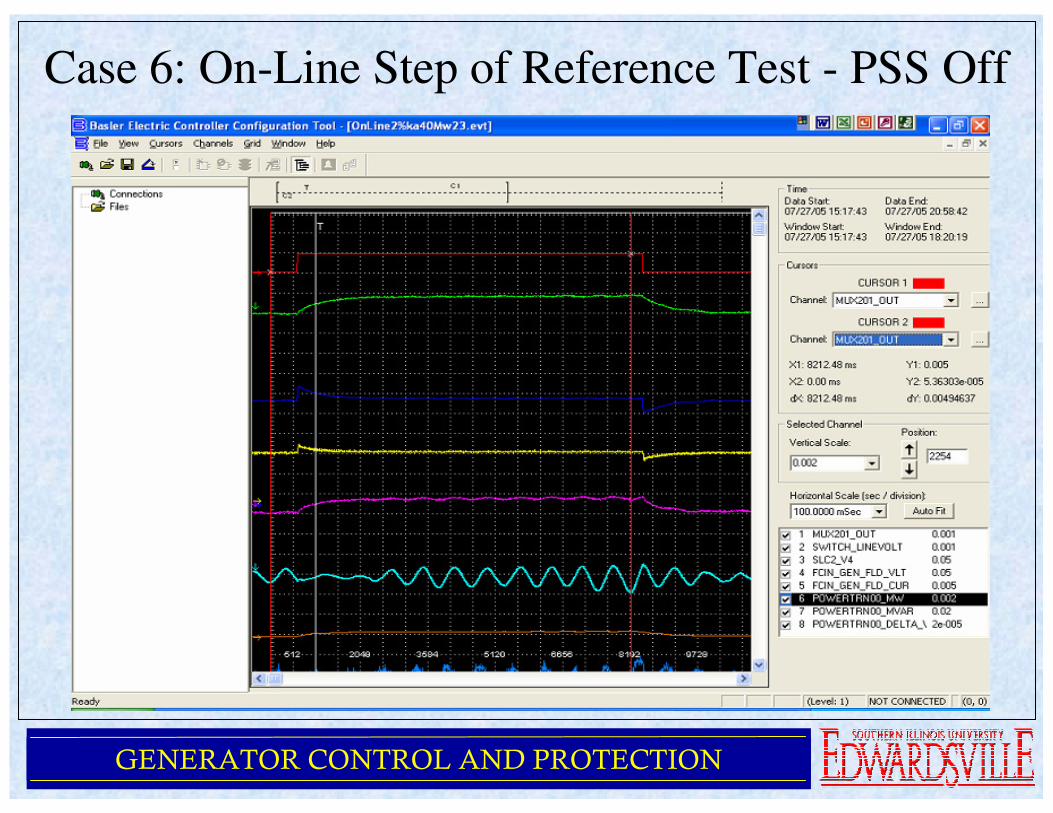
Case 6: On-Line Step of Reference Test - PSS Off
GENERATOR CONTROL AND PROTECTION
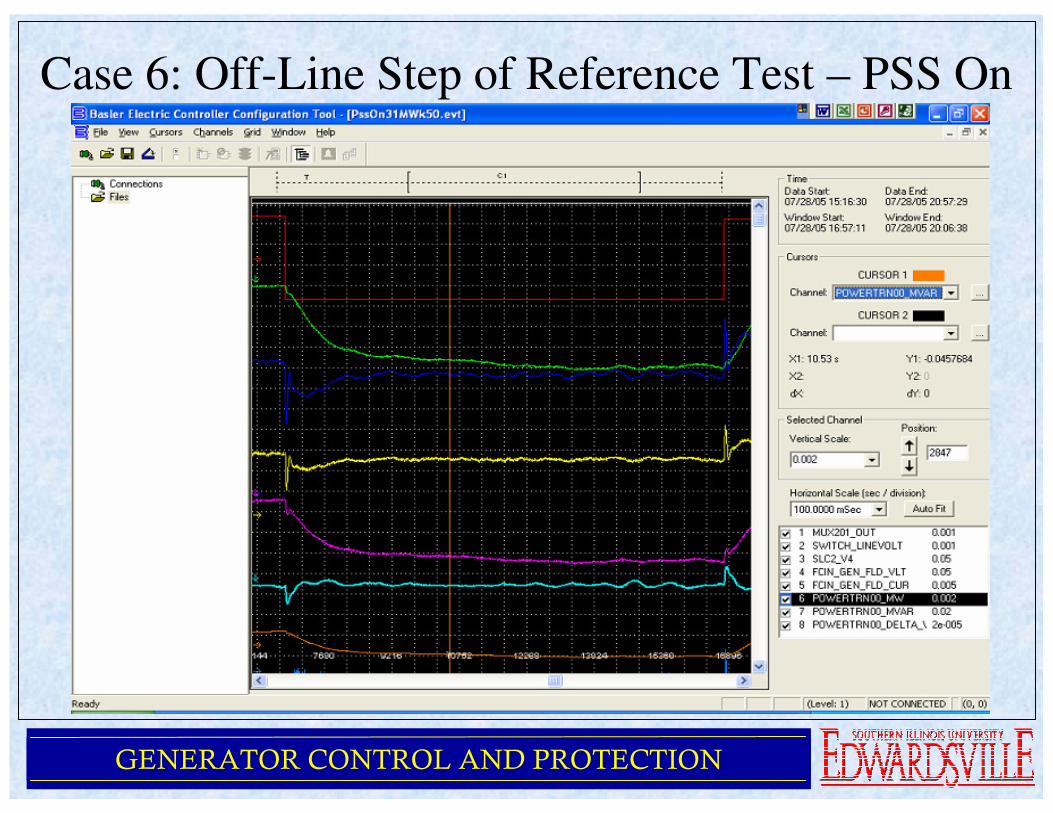
Case 6: Off-Line Step of Reference Test – PSS On
GENERATOR CONTROL AND PROTECTION
Power System Stability
– A function of fast protective relaying
– PSS is used to provide damping to prevent
power system oscillations
– Provide damping via excitation control
– PSS has little effect on first swing stability, but
restores damping lost by adding high initial
response excitation systems
– Many different stabilizing schemes exist - focus
on integral of accelerating power
GENERATOR CONTROL AND PROTECTION
QUESTIONS?

















