28
PREDICTIVE MAINTENANCE OF AGILON AUTOMATIC WAREHOUSE Mikael Björkbom, Sami Terho

PREDICTIVE
MAINTENANCE OF
AGILON AUTOMATIC
WAREHOUSE
Mikael Björkbom, Sami Terho
© 2016 Konecranes. All rights reserved.24.5.2017Mikael Björkbom, Sami Terho2
© 2016 Konecranes. All rights reserved.
TRUCONNECT Remote Monitoring
• Crane maintenance information through
YourKonecranes.com portal– Usage data
– Maintenance data
– Asset details
TRUCONNECT Remote Support
• 24/7 remote problem solving and troubleshooting
REMOTE MONITORING AND SUPPORT

© 2016 Konecranes. All rights reserved.
AGILON
24.5.2017Mikael Björkbom, Sami Terho4
© 2016 Konecranes. All rights reserved.
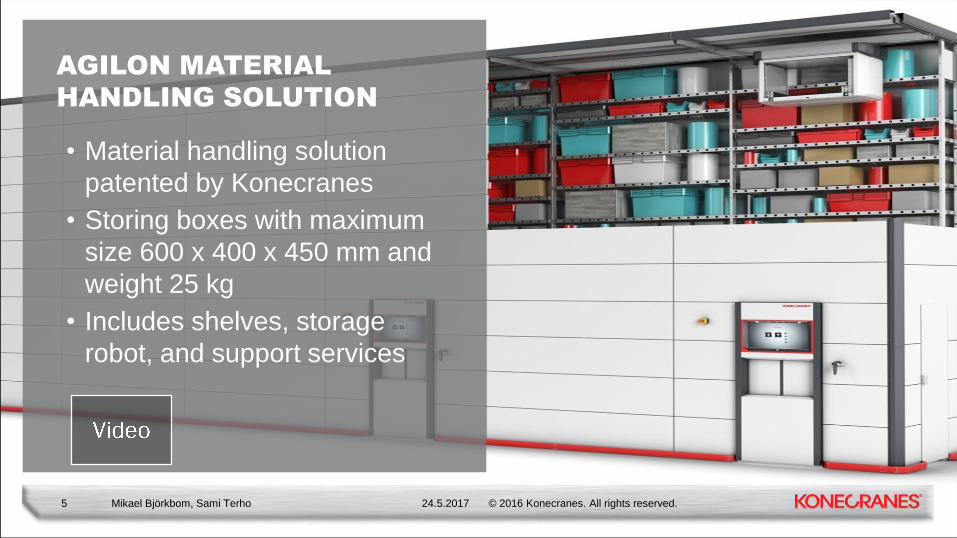
AGILON MATERIAL
HANDLING SOLUTION
• Material handling solution
patented by Konecranes
• Storing boxes with maximum
size 600 x 400 x 450 mm and
weight 25 kg
• Includes shelves, storage
robot, and support services
24.5.2017Mikael Björkbom, Sami Terho5
© 2016 Konecranes. All rights reserved.
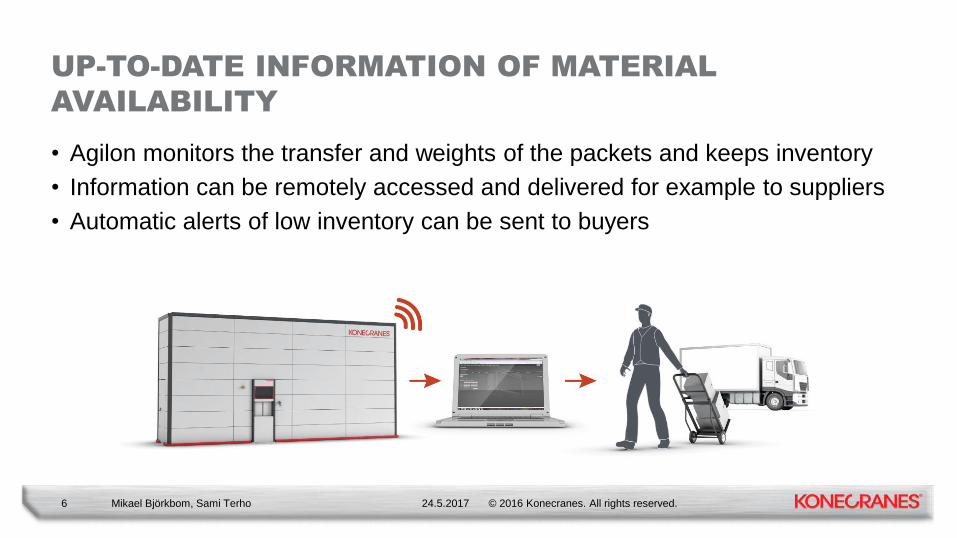
• Agilon monitors the transfer and weights of the packets and keeps inventory
• Information can be remotely accessed and delivered for example to suppliers
• Automatic alerts of low inventory can be sent to buyers
UP-TO-DATE INFORMATION OF MATERIAL
AVAILABILITY
24.5.2017Mikael Björkbom, Sami Terho6
© 2016 Konecranes. All rights reserved.
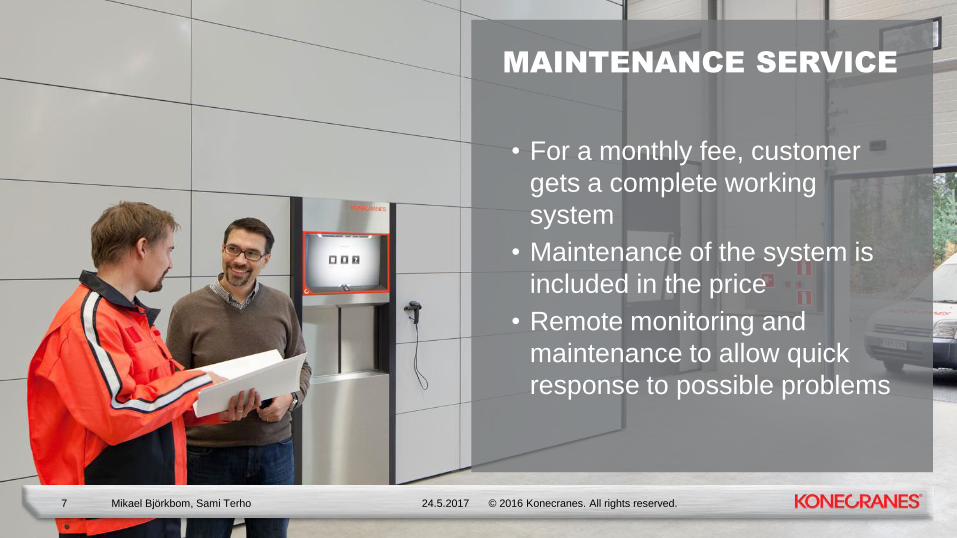
• For a monthly fee, customer
gets a complete working
system
• Maintenance of the system is
included in the price
• Remote monitoring and
maintenance to allow quick
response to possible problems
MAINTENANCE SERVICE
24.5.2017Mikael Björkbom, Sami Terho7
© 2016 Konecranes. All rights reserved.
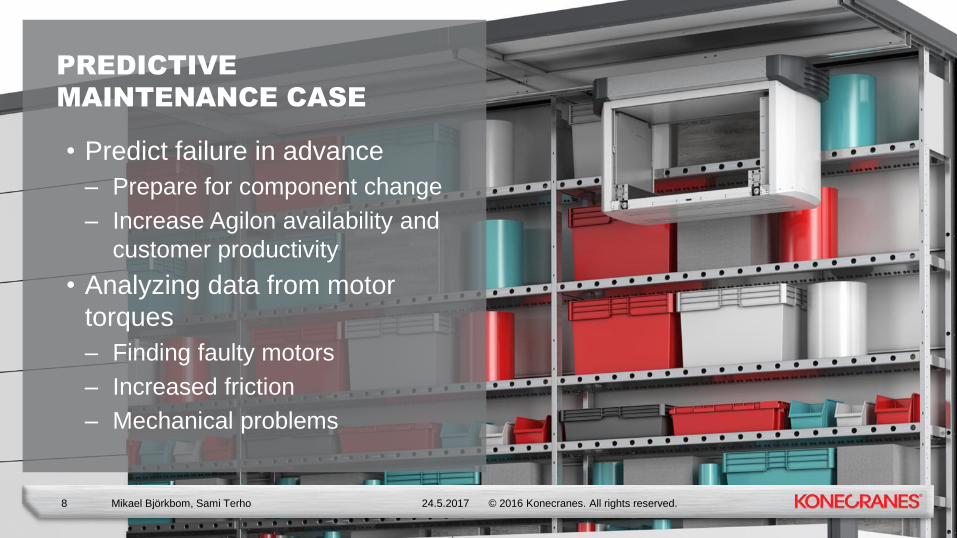
PREDICTIVE
MAINTENANCE CASE
• Predict failure in advance
– Prepare for component change
– Increase Agilon availability and
customer productivity
• Analyzing data from motor
torques
– Finding faulty motors
– Increased friction
– Mechanical problems
24.5.2017Mikael Björkbom, Sami Terho8
© 2016 Konecranes. All rights reserved.
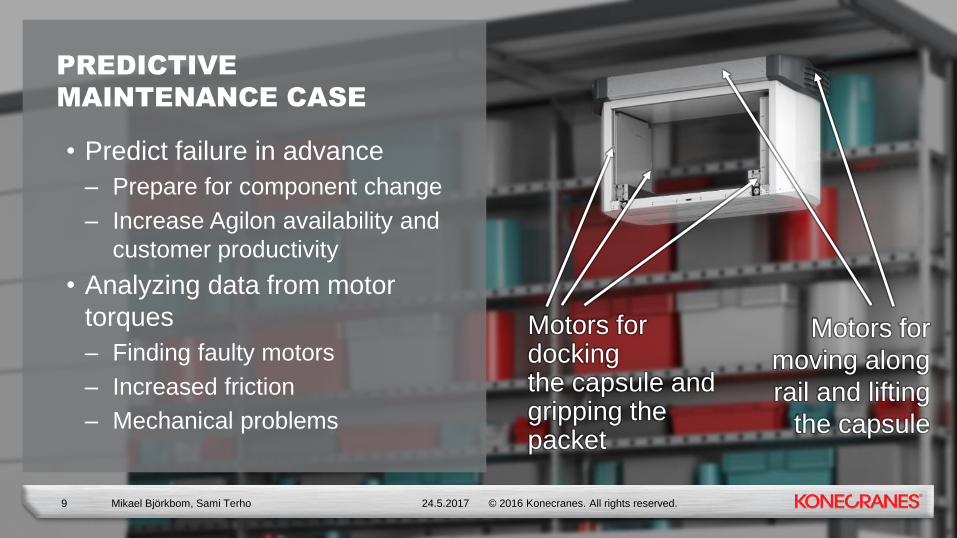
PREDICTIVE
MAINTENANCE CASE
• Predict failure in advance
– Prepare for component change
– Increase Agilon availability and
customer productivity
• Analyzing data from motor
torques
– Finding faulty motors
– Increased friction
– Mechanical problems
24.5.2017Mikael Björkbom, Sami Terho9
Motors for dockingthe capsule andgripping the packet
Motors for
moving along
rail and lifting
the capsule
© 2016 Konecranes. All rights reserved.
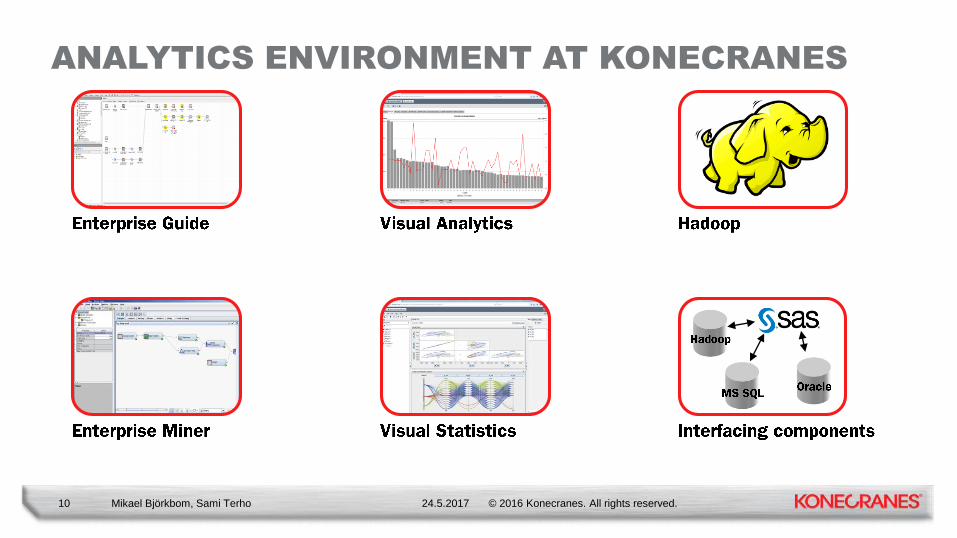
ANALYTICS ENVIRONMENT AT KONECRANES
24.5.2017Mikael Björkbom, Sami Terho10
© 2016 Konecranes. All rights reserved.
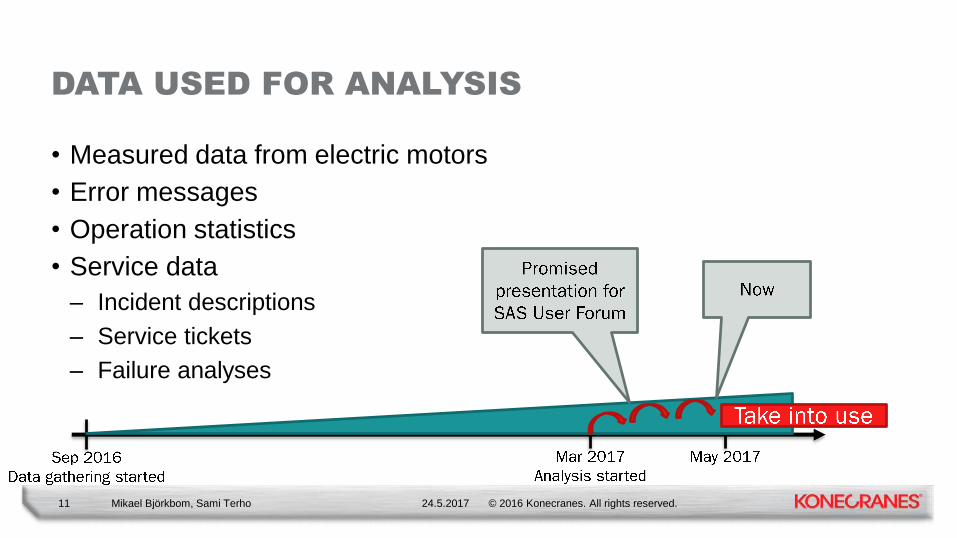
• Measured data from electric motors
• Error messages
• Operation statistics
• Service data
– Incident descriptions
– Service tickets
– Failure analyses
DATA USED FOR ANALYSIS
24.5.2017Mikael Björkbom, Sami Terho11
© 2016 Konecranes. All rights reserved.
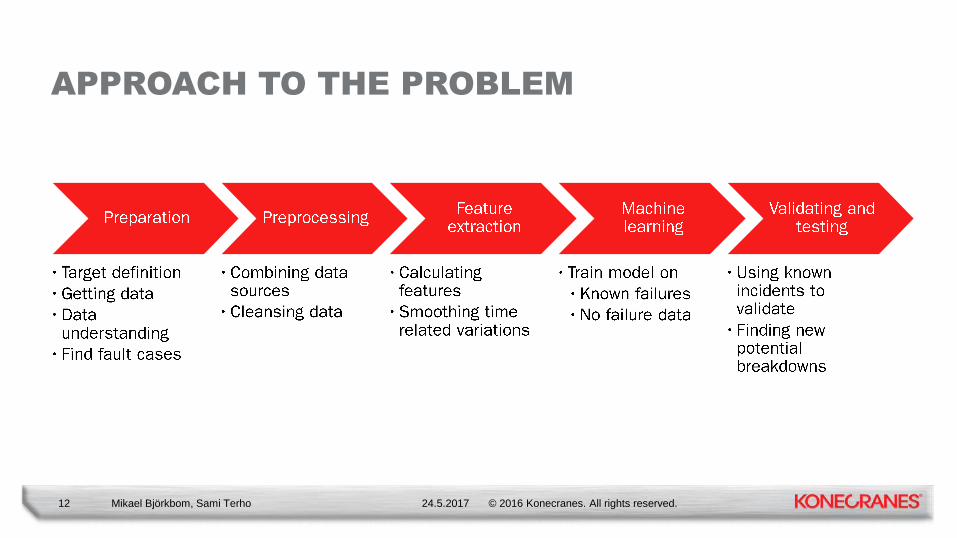
APPROACH TO THE PROBLEM
24.5.2017Mikael Björkbom, Sami Terho12
© 2016 Konecranes. All rights reserved.
• Get data
– If first case: CSV dumps from database…
– Direct database connection
• Understand data
– Data quality
– Joining different data sources
– Finding failure cases
• Define problem and modeling target
– Predict days or cycles to failure
– Predict if failure will occur soon
PREPARATION
24.5.2017Mikael Björkbom, Sami Terho13
© 2016 Konecranes. All rights reserved.
• Analytics Base Table– Time-resolution: day
– Motordata• 2-4 motors for each movement: combine measurements: mean, min, max, range…
• Daily features: mean, min, max, P5, P95, range…
• Change of values
• ~100 features
– Error messages• Categorize: ~20 categories
• Sum counts by day
• Moving average to include history
– Operation statistics already by day
• Target– Manually from service tickets
PREPROCESSING AND FEATURE EXTRACTION
24.5.2017Mikael Björkbom, Sami Terho14
© 2016 Konecranes. All rights reserved.
• Finding example cases for target variable
– Service data written by humans
– Can this failure be seen in the available data?
– Manual review of service data -> select target cases
• Typical for predictive maintenance, since data not intended for machine readability
• Hybrid approach
– Manually verified cases: 10x weight
– Automatic cases based on data
• Only few certain failures identified
PREDICTIVE MAINTENANCE EXAMPLE CASES
24.5.2017Mikael Björkbom, Sami Terho15
© 2016 Konecranes. All rights reserved.
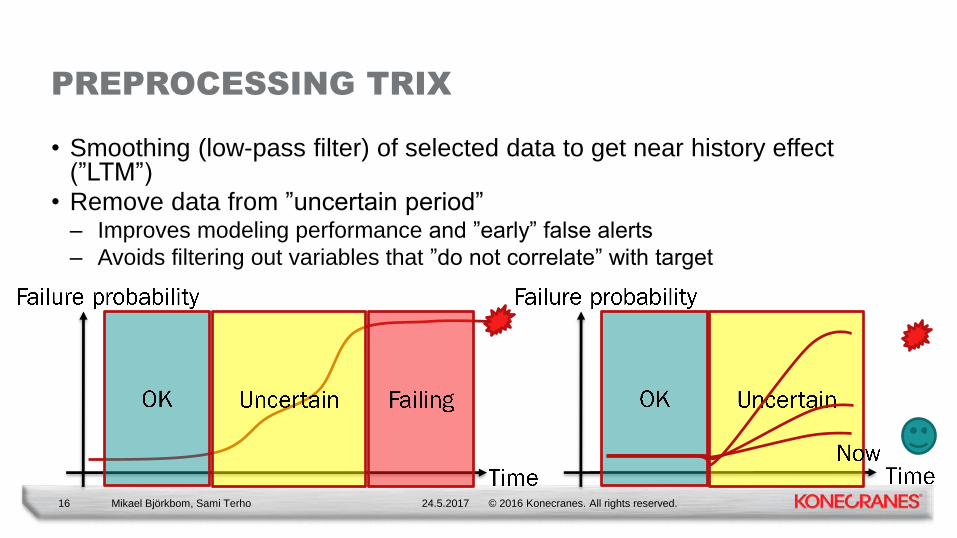
• Smoothing (low-pass filter) of selected data to get near history effect (”LTM”)
• Remove data from ”uncertain period”– Improves modeling performance and ”early” false alerts
– Avoids filtering out variables that ”do not correlate” with target
PREPROCESSING TRIX
24.5.2017Mikael Björkbom, Sami Terho16
© 2016 Konecranes. All rights reserved.
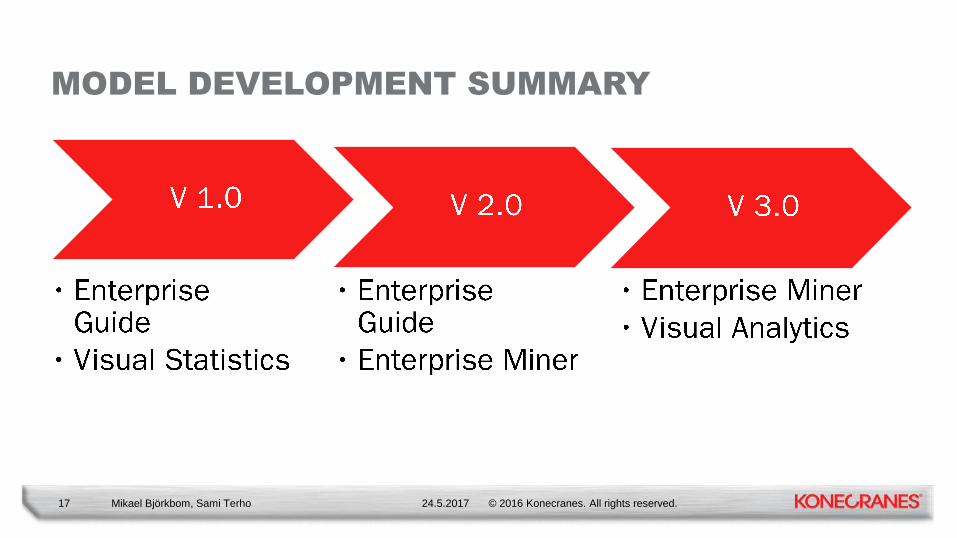
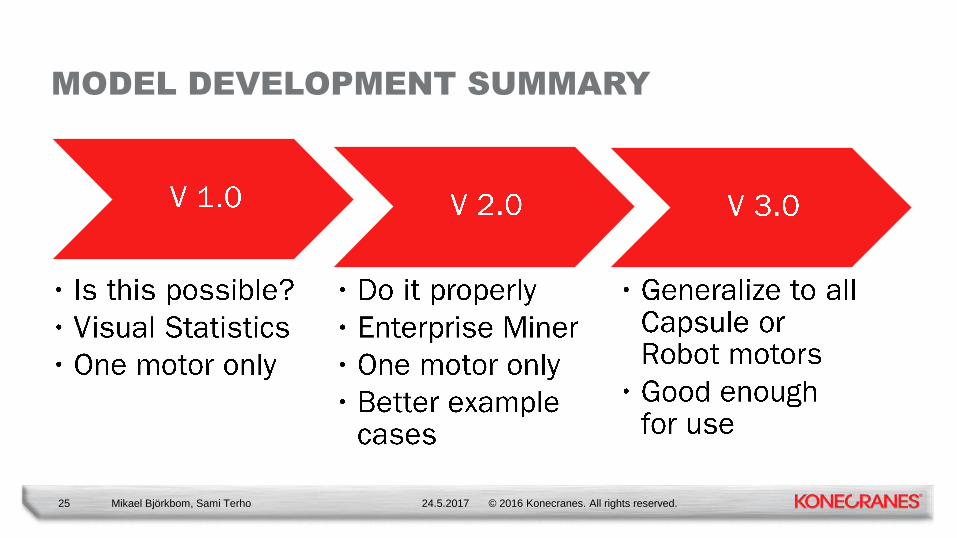
MODEL DEVELOPMENT SUMMARY
24.5.2017Mikael Björkbom, Sami Terho17
© 2016 Konecranes. All rights reserved.
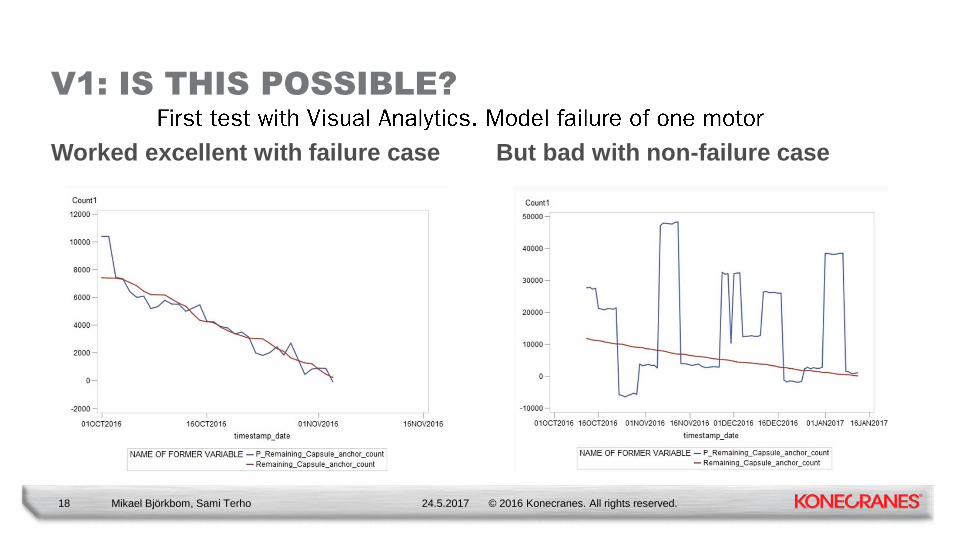
Worked excellent with failure case But bad with non-failure case
V1: IS THIS POSSIBLE?
24.5.2017Mikael Björkbom, Sami Terho18
© 2016 Konecranes. All rights reserved.
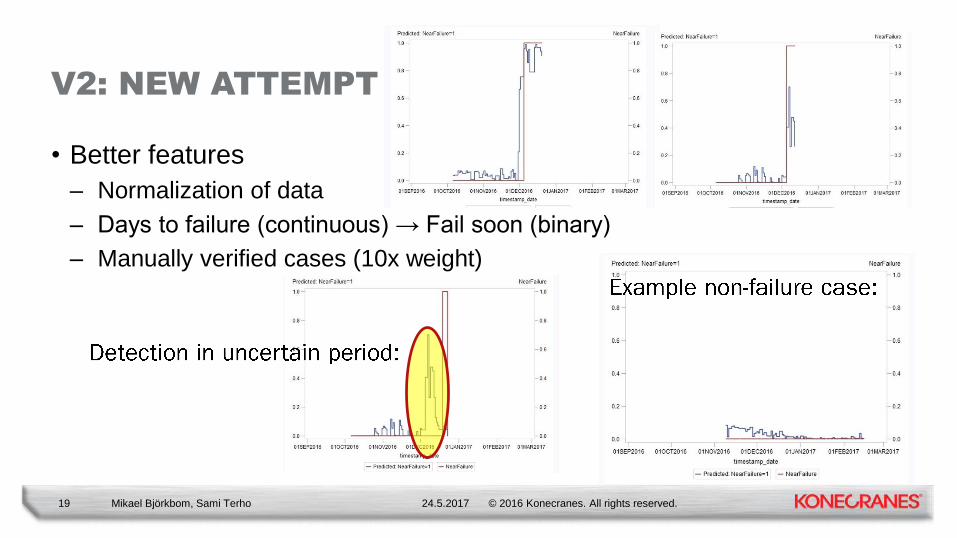
• Better features
– Normalization of data
– Days to failure (continuous) → Fail soon (binary)
– Manually verified cases (10x weight)
V2: NEW ATTEMPT
24.5.2017Mikael Björkbom, Sami Terho19
© 2016 Konecranes. All rights reserved.
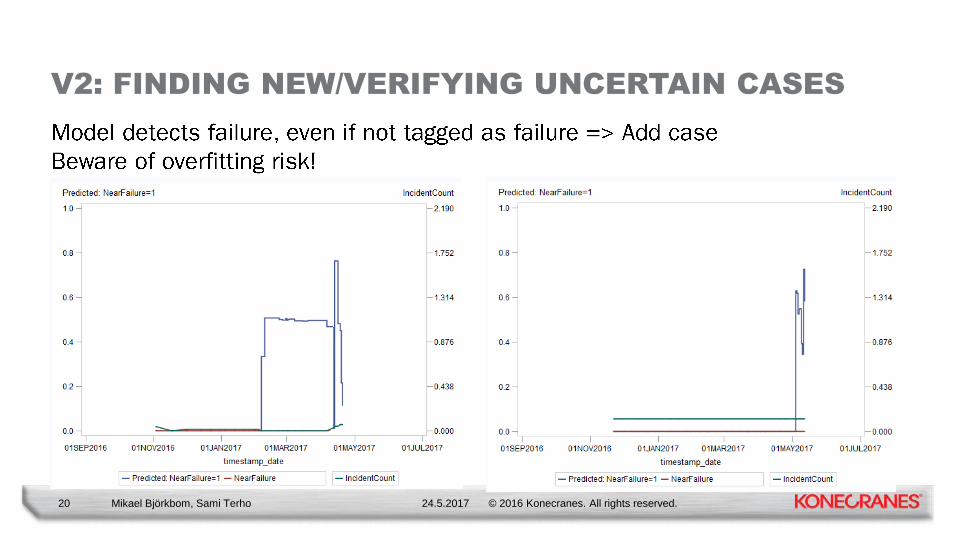
V2: FINDING NEW/VERIFYING UNCERTAIN CASES
24.5.2017Mikael Björkbom, Sami Terho20
© 2016 Konecranes. All rights reserved.
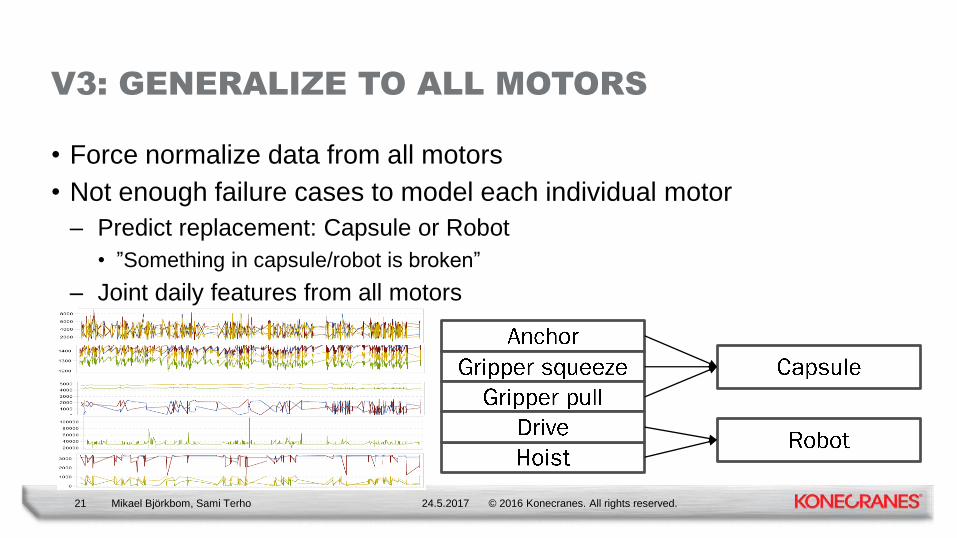
• Force normalize data from all motors
• Not enough failure cases to model each individual motor
– Predict replacement: Capsule or Robot
• ”Something in capsule/robot is broken”
– Joint daily features from all motors
V3: GENERALIZE TO ALL MOTORS
24.5.2017Mikael Björkbom, Sami Terho21
© 2016 Konecranes. All rights reserved.
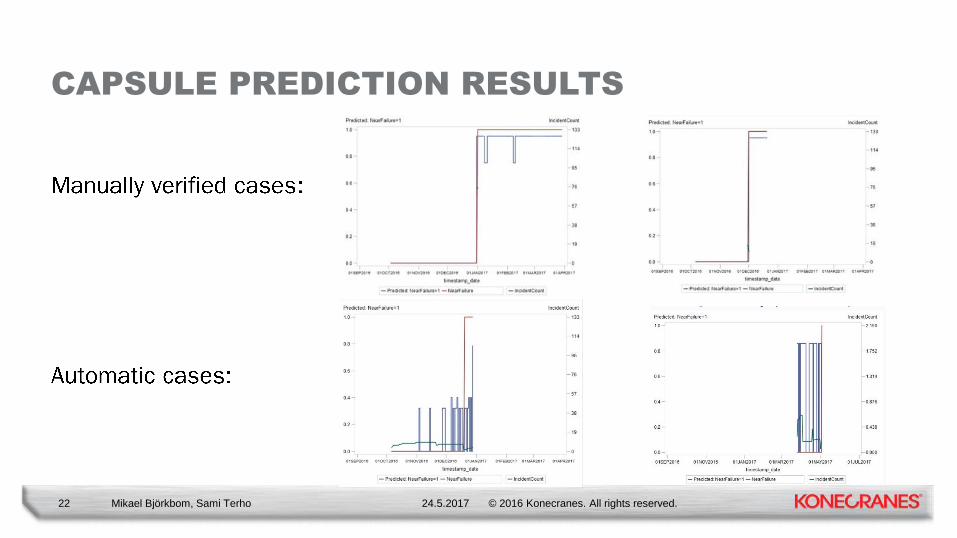
CAPSULE PREDICTION RESULTS
24.5.2017Mikael Björkbom, Sami Terho22
© 2016 Konecranes. All rights reserved.
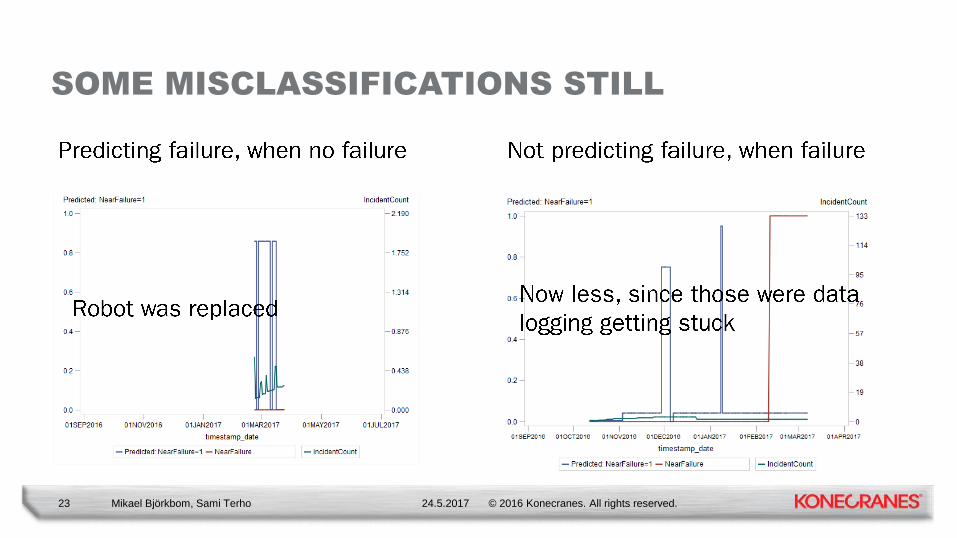
SOME MISCLASSIFICATIONS STILL
24.5.2017Mikael Björkbom, Sami Terho23
© 2016 Konecranes. All rights reserved.
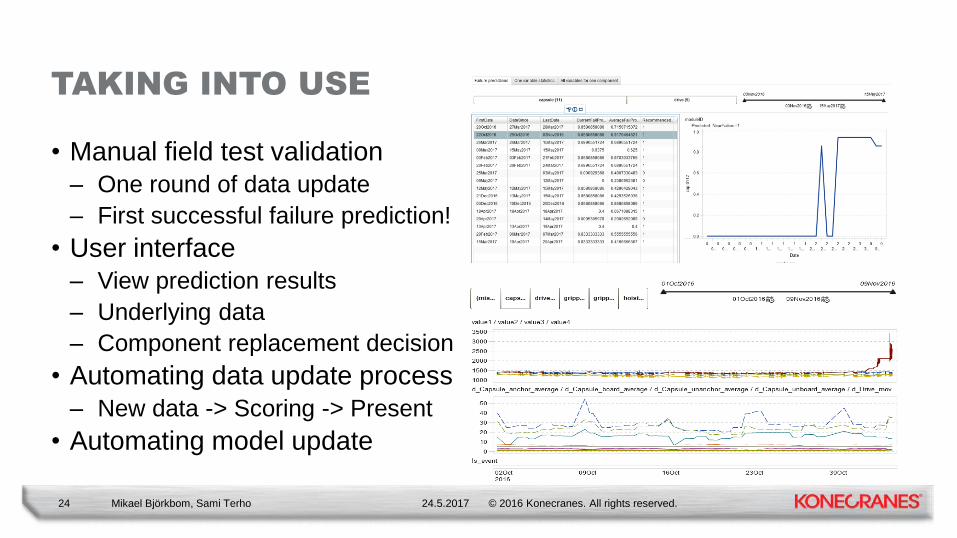
• Manual field test validation
– One round of data update
– First successful failure prediction!
• User interface
– View prediction results
– Underlying data
– Component replacement decision
• Automating data update process
– New data -> Scoring -> Present
• Automating model update
TAKING INTO USE
24.5.2017Mikael Björkbom, Sami Terho24
© 2016 Konecranes. All rights reserved.
MODEL DEVELOPMENT SUMMARY
24.5.2017Mikael Björkbom, Sami Terho25
© 2016 Konecranes. All rights reserved.
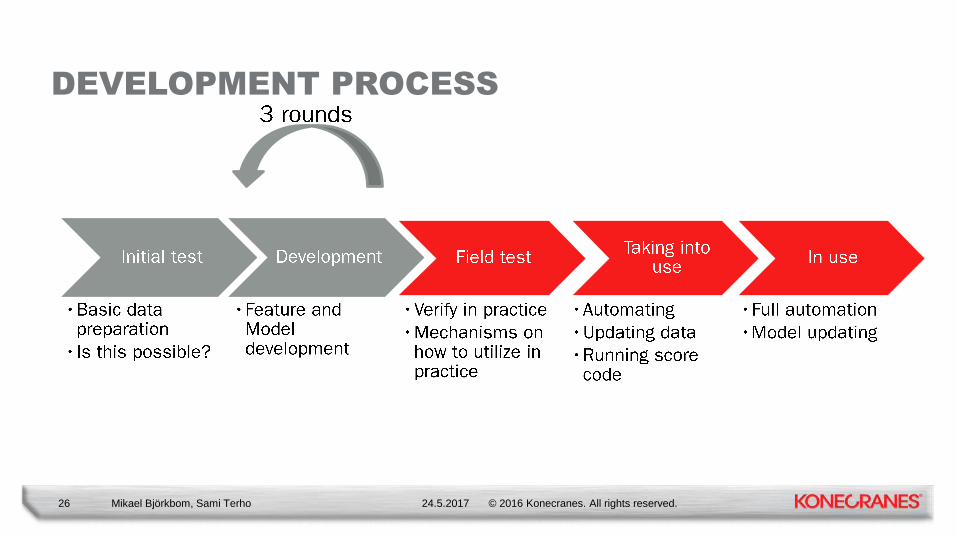
DEVELOPMENT PROCESS
24.5.2017Mikael Björkbom, Sami Terho26
© 2016 Konecranes. All rights reserved.
• Predictive maintenance case
– Typically data entered by humans
– Can the failure be seen in the data?
• Don’t assume things from the data
– Data end does not mean failure: Logging was ended for other reason
– Component change without obvious reason: capsule is also changed when robot is changed
• Some manual work can make the difference
• Few good failure cases
– Few good example cases to steer the model in right direction
– Use model to find the rest of the cases
• Ask from experts
– Learn everything they know
– Success is in the features
LEARNINGS
24.5.2017Mikael Björkbom, Sami Terho27

© 2016 Konecranes. All rights reserved.
NOT JUST LIFTING
THINGS, BUT
ENTIRE BUSINESSES
24.5.2017Mikael Björkbom, Sami Terho28

















