26
HUMAN-ADAPTIVE CONTROL OF SERIES ELASTIC ACTUATORS Andrea Calanca Altair Robotics Laboratory University of Verona

HUMAN-ADAPTIVE CONTROL
OF SERIES ELASTIC ACTUATORS
Andrea Calanca
Altair Robotics Laboratory
University of Verona

Introduction
18/07/2014 Andrea Calanca - Altair Lab 2
Advanced robotics for pHRI
based on elastic actuators

Introduction
• The unpredictable nature of human beings can
influence closed loop dynamics and stability.
• The most common method to solve the stability issue
is by means of passivity-based (PB) control.
• No method to ensure predictable dynamics
18/07/2014 Andrea Calanca - Altair Lab 3

Introduction
Limitations of Passivity-Based Control
1. Several analysis of performance limitations can be
found in the literature
2. By only assuming that the human is passive it is not
possible to define closed loop dynamics
18/07/2014 Andrea Calanca - Altair Lab 4
?

Adaptive Force Control of Soft Joints
Why do we use passivity?
Because the environment is unknown.
What if we estimate the environment?
• Can we have predictable dynamics?
• Can we overcame passivity performance limitations?
18/07/2014 Andrea Calanca - Altair Lab 5

Adaptive Force Control of Soft Joints
• Observation 1:
The approximation of human joint and endpoints with
second order linear models is commonly accepted
• Widely used and tested approach in literature, see [Stein1996,
Kearney1997, Stroeve1999, Xu1999, Tee2004, Palazzolo2005]
• Observation 2:
Control design does not
need accurate models
18/07/2014 Andrea Calanca - Altair Lab 6

Human Adaptive Force Control
• Key Concepts:
• Online estimation of second order model parameters
• Using the estimated parameters in the control law
• The human can be considered as a plant (servo control)
• Convergence of both tracking and estimation errors
• Main advantages:
• Predictable performances
• The tuning procedure
is automatic
• We can account for
a generic human joint
• Models can adapt
to changing situations
18/07/2014 Andrea Calanca - Altair Lab 7

Human Adaptive Force Control
We based on model reference adaptive control (MRAC) with a PD control structure and II order reference model
Reference Model
Control Law
Adaptation
System Model
18/07/2014 Andrea Calanca - Altair Lab 8

Human Adaptive Force Control
18/07/2014 Andrea Calanca - Altair Lab 9
passive
active
As
ym
pto
tic S
tab
ilit
y
Bo
un
ded
ness

Human Adaptive Force Control
“Passivity” Proof
Assumption: the
environment contains an
inertia
Let us consider first a pure
inertial environment
18/07/2014 Andrea Calanca - Altair Lab 10

Human Adaptive Force Control
18/07/2014 Andrea Calanca - Altair Lab 11
Closed loop dynamics
passive

Human Adaptive Force Control
Convergence Proof
Assumption: second order linear environment
18/07/2014 Andrea Calanca - Altair Lab 12
implied by
passivity!

Closed
loop
dynamics
Human Adaptive Force Control
18/07/2014 Andrea Calanca - Altair Lab 13

Closed
loop
dynamics
Human Adaptive Force Control
18/07/2014 Andrea Calanca - Altair Lab 14
?

Human Adaptive Force Control
18/07/2014 Andrea Calanca - Altair Lab 15
Convergence to a well-defined arbitrarily small region
1. Global Uniformly Ultimately Boundedness
• Negative derivative on every boundary
where is arbitrary large
• Ultimate bound for
2. The region volume decreases monotonically
when 𝜆 increases
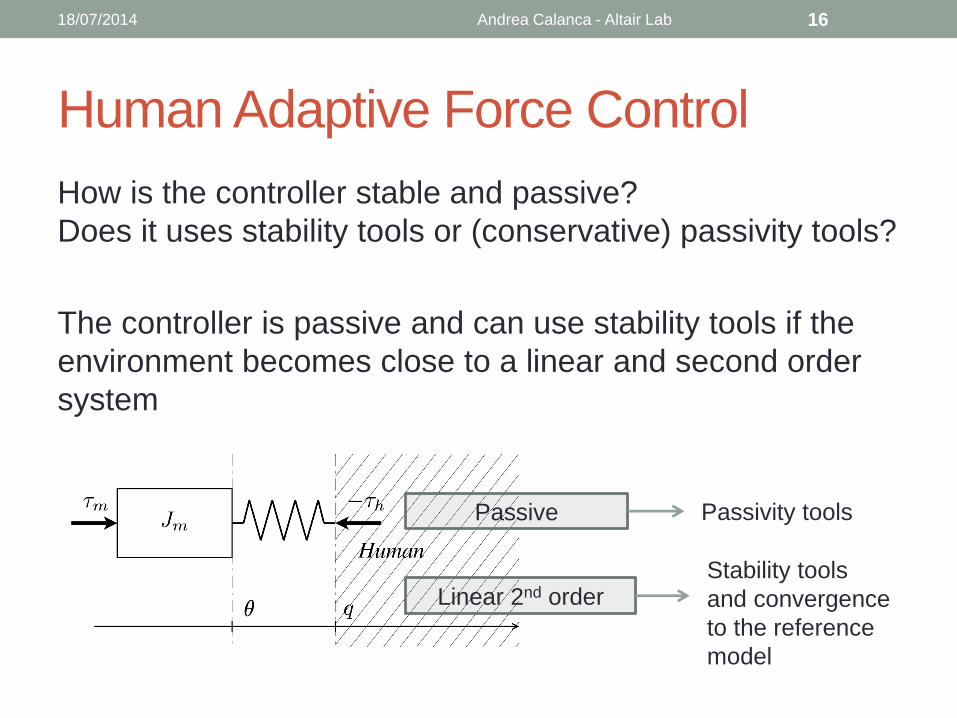
Human Adaptive Force Control
How is the controller stable and passive?
Does it uses stability tools or (conservative) passivity tools?
The controller is passive and can use stability tools if the
environment becomes close to a linear and second order
system
18/07/2014 Andrea Calanca - Altair Lab 16
Linear 2nd order
Passive Passivity tools
Stability tools
and convergence
to the reference
model

Validation
Series Elastic Actuator (SEA) prototype:
• Experiments
• Impedance is varied between very low and very high values
• 1. The human hold the frame and try to be as stiff as possible
• 2. The human releases the frame
18/07/2014 Andrea Calanca - Altair Lab 17

Validation: Passivity-Based Control
18/07/2014 Andrea Calanca - Altair Lab 18
Low Impedance High Impedance Low Impedance High Impedance

Validation: Human Adaptive Control
18/07/2014 Andrea Calanca - Altair Lab 19
High High Low Low
Torque
Tracking
error
Estimated
Parameters

Validation: Adaptive - Slow Adaptation
18/07/2014 Andrea Calanca - Altair Lab 20
High High Low Low
Torque
Tracking
error
Estimated
Parameters

18/07/2014 Andrea Calanca - Altair Lab 21
Validation: Discontinuous Reference
Adaptive Passive
High Low High Low

Human
Adaptive
Passive
18/07/2014 Andrea Calanca - Altair Lab 22

• Passive Control based on
Human-Acceleration
Feedback
• The only existing passive
controller which ensures
predictability
Validation: Acceleration Feedback
18/07/2014 Andrea Calanca - Altair Lab 23

Validation: Overall Results
• Passive controllers displayed different errors (different
dynamics) between the high and low impedance
conditions
• Statistical validation: 3-𝜎 intervals over 240 sine periods
18/07/2014 Andrea Calanca - Altair Lab 24
P: passivity based
PAB: acceleration based
HA: human-adaptive

References A. Calanca, P. Fiorini
Human-Adaptive Control of Series Elastic Actuators
Robotica, 2014, Special Issue on rehabilitation Robotics, available on CJO2014
A. Calanca, R.Muradore, P. Fiorini
Human-Adaptive Control of Complant Actuators
International Advanced Robotics Program – Conference on Bio-inspired Robotics, 2014 May 14-16,
Frascati, Rome, Italy.
A. Calanca, N.Piccinelli, P. Fiorini
Human-Adaptive Control of Complant Actuators
RoboAssist 2014, ICRA Workshop, 2014 June 5, Honk Hong, China.
A. Calanca, L. Capisani, and P. Fiorini,
Robust Force Control of Series Elastic Actuators
Actuators, vol 3, no.3, 2014, Special Issue Soft Actuators
18/07/2014 Andrea Calanca - Altair Lab 25

Thank You.
18/07/2014 Andrea Calanca - Altair Lab 26
Andrea Calanca
Altair Lab
University Of Verona

















